Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.


14 Modeling and Control of Vibration in Mechanical Systems
The Fourier transform of x(t) is
X(ω) = a(ω) − ib(ω). (1.29)
An equivalent form of the Fourier transform is given by
x(t) =
Z
∞
−∞
X(ω)e
iωt
dω, (1.30)
and
X(ω) =
1
2π
Z
∞
−∞
x(t)e
−iωt
dt. (1.31 )
The spectrum of a non periodic signal is the magnitude of its Fourier transform,
that is, X(ω). Equation (1.31) implies that the transform is sy mmetric about ω = 0,
that is
X(−ω) = X(ω). (1.32 )
The transform of a ti me-shifted signal x(t − d) is X(ω)e
−iωd
and its spectrum is
the same as the spectrum of x(t), while the time shift d affects only the phase angle
of the transform.
1.6.2 Relationship between the Fourier and Laplace transforms
The Fourier transform X(ω) of x (t) is related to the Laplace transform X(s) as
follows.
X(ω) =
1
2π
X(s)|
s=iω
. (1.33 )
1.6.3 Spectral analys is
The spectral density, or power spectral density, S
xx
(ω), is one of the most useful
functions in vibration testing. I t is defined as
S
xx
(ω) =
1
2π
Z
∞
−∞
R
xx
(τ)e
−iωτ
dτ, (1.34)
where
R
xx
(τ) = lim
T →∞
1
T
Z
T /2
−T /2
x(t)x(t + τ)dt (1.35 )
is the autocorrelation function and T is the time duration.

Mechanical Systems and Vibration 15
R
xx
(τ) can be written as the inverse Fourier transform of S
xx
(ω):
R
xx
(τ) =
Z
∞
−∞
S
xx
(ω)e
iωτ
dω. (1.36)
The cross-spectral density is written as
S
xy
(ω) =
1
2π
Z
∞
−∞
R
xy
(τ)e
−iωτ
dτ, (1.37 )
where
R
xy
(τ) = lim
T →∞
1
T
Z
T /2
−T /2
x(t)y(t + τ )dt (1.38 )
is the cross-correlation function.
A very useful relati on is that
R
xx
(0) =
Z
∞
−∞
S
xx
(ω)dω = E(x
2
), (1.39 )
which means that the mean-square value can be computed from the spectral density.
2
Modeling of Disk Drive System and It s
Vibration
2.1 Introduction
Modeli ng plays an important role in any control system analysis and design. A
physi cal system has to be modeled in order to design a contro l system. Physical
systems are more or less nonli near and may vary with time. Researchers have made
many attempts to deal with a physical system: approximating it with a linear model
at an operating point , finding a control strategy that is robust and adaptable to the
changes in the physical system.
The system modeling in this chapter is discussed from the first principl e of actu-
ators. System dyn amics measurement in the frequency domain is used to determine
the parameters of a model in the form of transfer function. To have a more realist ic
model, uncertainties, especially due to high frequency unmodeled d ynamics, have to
be involved inherently. Moreover, nonlinearity induced by friction is measured under
the condition that the actuator is controlled to avoid unsteady signal measurement.
The hysteresis of friction versus actuator position is then ob tained f rom the measure-
ment in closed-loop. An operator based modeling approach is adopted to model the
hysteresis, and an optimal model is obtained by minimizing the energy gain between
the position and the modeling error.
In this chapter, vibr at ion modeling is based primarily on the spectral decomposi-
tion of the error signal measured in a closed-loop system. A decoupling procedure
is proposed which leads to approximate distu rbance and noise models. Particularly,
low-frequency disturbances are modeled as the output of an adaptive nonlinear mech-
anism with the error signal as the in put.
2.2 System description
A hard disk drive as shown in Figure 1.1 includes five major parts: baseplate and
cover, spindle and motor assembly, actuator assembly, disk, head/suspension assem-
bly, and electronics card.
17
18 Modeling and Control of Vibration in Mechanical Systems
The spindle and motor assembly includes disk clamps to clamp disks. The actuator
assembly contains an actuator driven by voice-coil motor (VCM) and mounted via
ball-bearing at each end of a pivot shaft, flex cable carrying head and VCM leads, and
arms to support suspension/ head extension between the disks. In the head/suspension
assembly, an airbearing surface is created on surface next to the rotating disk, the
slider carrying heads flies on top of the disk surface, and a gimbal attaches the slider
to the suspension. The electronics card involves drivers for the sp indle motor and
VCM, read/write (R /W) electronics, a servo demodulator, and micro processors for
servo control and control of interface to host computer.
The actuator servo channel consists of a demodulator producing position infor ma-
tion from the servo burst read from the disk during seeking and following; a servo
controller to control the po sition of the R/W head during reading, writing and seek-
ing; spindle control to keep the spindle ro tating at a specific speed wit h a minimum
speed fluctuation and a power driver to drive the spindle motor and the VCM actu-
ator. The servo or position information is used to position the magnetic head on the
disk sur faces. Position measurement of the magnetic head is achieved by means of
analyzing the position error signal (PES) calculated from the read back signal.
The head-positioning servomechanism is a control syst em that p ositions the R/W
head from one track to another in minimum time, and repositions the R/W head over
a desired track with minimum statistical deviation from the track center. A settling
controller is used in between the above seeking and following modes.
The seek time is a measure of how fast the disk drive actuators can move the R/W
head to a desired location. The seek time is limited by the actuator behavior, acceler-
ation current level and the control algorith m. The major requirement in the seeking
process is fast and smooth seeking with small or even n o overshoot. Dual-st age ac-
tuation with a VCM as pri mary actuator and a mi croactuator as secondary actuator
works as one way to achieve fast seeking and settl ing due to higher bandwidth.
Once the actuator is regulating the position of the R/W head at the desired track,
the smaller the head position deviates from the desired track center, the closer the
tracks can be put together and the higher the track density becomes. In this stage,
the servo perfor mance is l imited by mechanical factors i n the actuator, d isk plat ter,
spind le motor, etc. An improved mechanical design is supposed to present less dis-
turbance, causing less off-track. On the other hand, a good closed-loop servo system
is expected to reject the disturbances. The error transfer function must be well de-
signed to yield a sufficiently small closed-loop non-repeatable runout. This typically
requires a satisfactory servo loop based on the disturbance spectrum. Generally, it
demands a high servo bandwidth, a high 0-dB crossover frequency and a low hump
of error rejection transfer function. A secondary microactuator activated to gether
with the VCM primary actuator is generally used to produce a higher bandwidth
closed-loo p system.
In a d isk drive, the positioning in formation or servo information (“servo bursts”)
is embedded in each disk surface. Servo bursts are conventionally written by costly
dedicated servo writing equipment external to t he disk drive, which uses a laser-
guided push-pin mechanism to position the write head on the disk su rface u ntil the
servo burst information is written on the d isk completely [53] [54]. The defects such

Modeling of Disk Drive System and Its Vibration 19
as non-circularity caused by the spindle motor vibration in the servo bursts will make
servo tracks more difficult to follow in disk drives. The demand of bi g storage capac-
ity in hard disk drives requires high track density. More accurate placement of servo
bursts is thus required accordingly. As technologies such as servo mechanism and
head and media technology advance, the capability of writing and reading narrower
tracks is improved, result ing in an increased track density.
Conventional servo writers require a clean ro om enviro nment because the disk
and head will be exposed to th e environment to allow access to the external head and
actuator. A self-servo track writer regenerates timi ng and radial infor mation from
previously written t racks using the existing R/W head [135]. The external equip-
ment is no longer needed in servo pattern writing and thus no open access is required
for the head disk assembly and servo t rack writing does not have to be carried out
in a clean room environment. However, the self-servo track writing creates the ra-
dial error propagation prob lem, which will hinder the whole process of servo track
writing if not properly solved [140].
In an embedded servo, data and servo in formation are written on all tracks in an
interleaved manner. All tracks are divided into a fixed number of radial sectors. Each
sector starts with a servo pattern followed by user d at a information. The pattern is
repeated for each sector. The fields in an embedded servo pattern include Pream-
ble, AGC field, sector or index mark, track address in gray code and servo bursts.
The positio n feedback information for the disk drive servo mechanism consists of
two components: gray code and position error signal. The gray code track num-
ber provides coarse position information. It determines the absol ute posit ion o f the
read/write head during seeking and tracking. Position error sign al, or PES, is the
relative d isplacement of the R/W h ead from the track center. When PES and gray
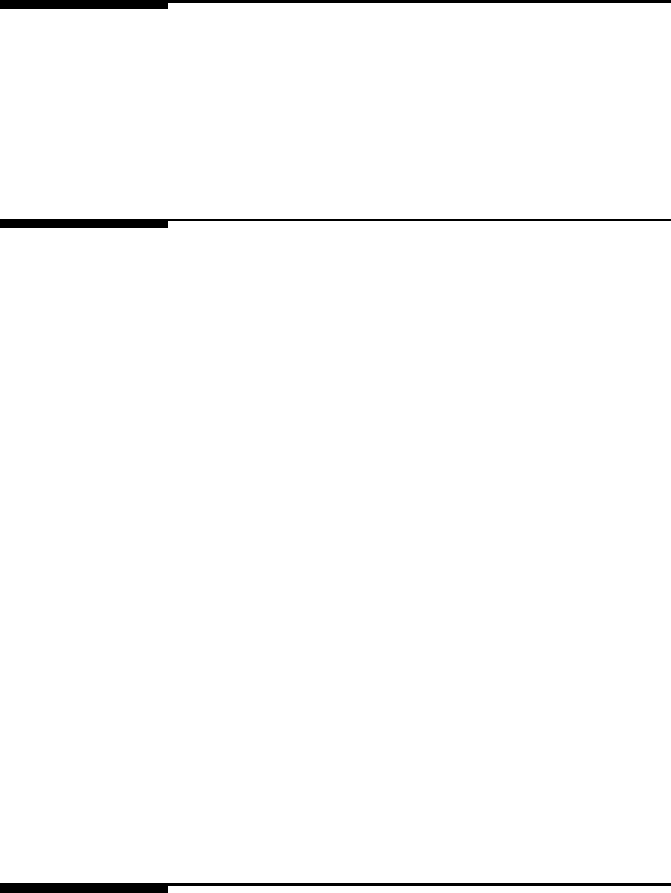
code are combined together, the position of the read/write head i s obtained. Figure
2.1 shows one read back signal of the embedded servo. The A, B, C, D bursts give
fine position error quant ifying the amount of track misregistration, i.e., the deviation
of the R /W head from the center of t he track.
2.3 System modeling
2.3.1 Modeling of a VCM actuator
A linear VCM actuator moves in and out along a disk radius in one direction. It
contains a coil which is rigidly attached to the structure to b e moved and suspended
in a magnetic field created by permanent magnets. When a current passes through the
coil, a force is prod uced which accelerates the actuator radi ally inward or outward,
depending on the direction of the current. The produced force is a function of the
current i
c
. Approximately,
f
m
= k
t
i
c
, (2.1)
20 Modeling and Control of Vibration in Mechanical Systems
FIGURE 2.1
A read b ack signal of embedded servo.
where k
t
is a linearized nominal value called torque constant.
The resonance of the actuator is mainly due to the flexibility of the pivot bearing,
arm, suspension, etc. When the bandwidth of a control loop is very low and the
resonance may not be a l imiting factor to the control design, the actuator model
can be considered as the simplified and rigid one which is a double integrator with
transfer function k/s
2
, i.e.,
y =
k
s
2
u, (2.2)
or
˙y = k
y
v, (2.3)
˙v = k
v
u, (2.4)
where u is th e i nput to the actuator, y and v are the displacement and t he velocity of
the read/write head, k
y
is the position measurement gain, and k
v
= k
t
/m with the
actuator mass m.
With higher bandwidth, the actuato r resonances have to b e considered in the con-
trol design, since the flexible resonance modes will r educe the sy stem stability and
affect control performance if ignored. Then the actuator model becomes
y =
k
v
k
y
s
2
P
r
(s)u, (2.5)
which in cl udes the resonance model P
r
(s). Let ω
n
= 2πf
n
correspond to a sing le
resonance frequency f
n
, and ξ
n
be the associated damping coefficient. A second
order transfer function can be used to represent the resonance, i.e.,
P
r
(s) =
ω
2
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
. (2.6)
Modeling of Disk Drive System and Its Vibration 21
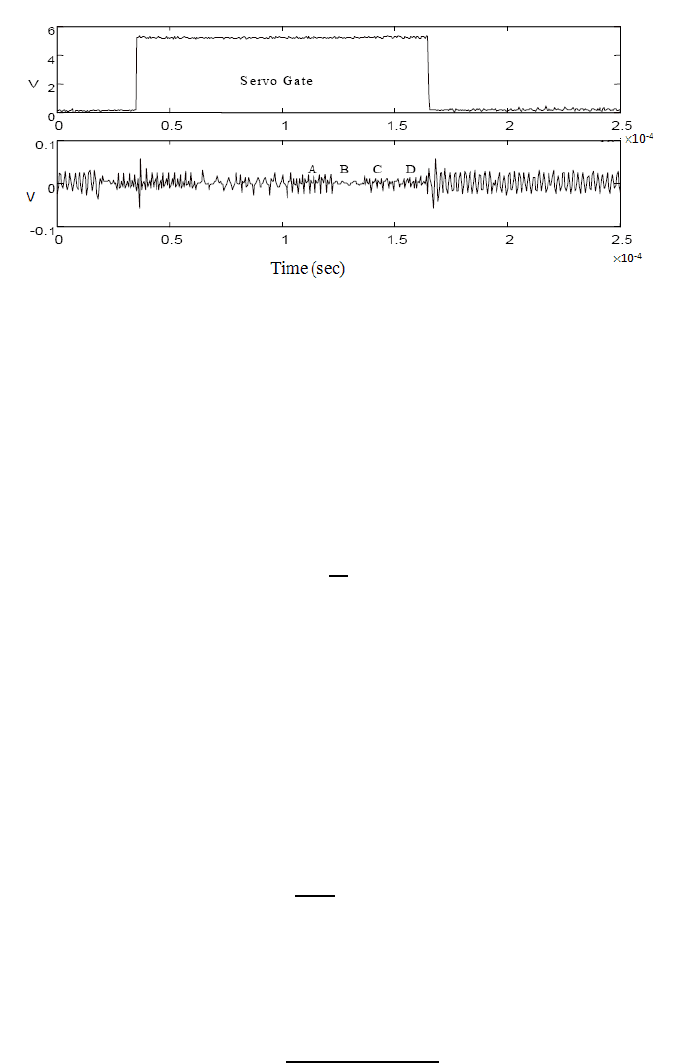
Different ξ
n
gives different frequency responses, shown in Figure 2.2. The peak
of magnitude is higher when ξ
n
decreases.
Magnitude(dB)
Frequency(Hz)
Phase(deg)
0
0
FIGURE 2.2
Frequency responses of a second o rder transfer fun ction.
Other forms of P
r
(s) in clude
P
r
(s) =
b
1
ω
n
s + b
0
ω
2
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
(2.7)
and
P
r
(s) =
b
2
s
2
+ b
1
ω
n
s + b
0
ω
2
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
(2.8)
with zeros included to facilitate a phase lift which is usually associated with reso-
nance modes.
For lightly damped resonance, 0 .005 ≤ ξ
n
≤ 0.05 is typical.
22 Modeling and Control of Vibration in Mechanical Systems
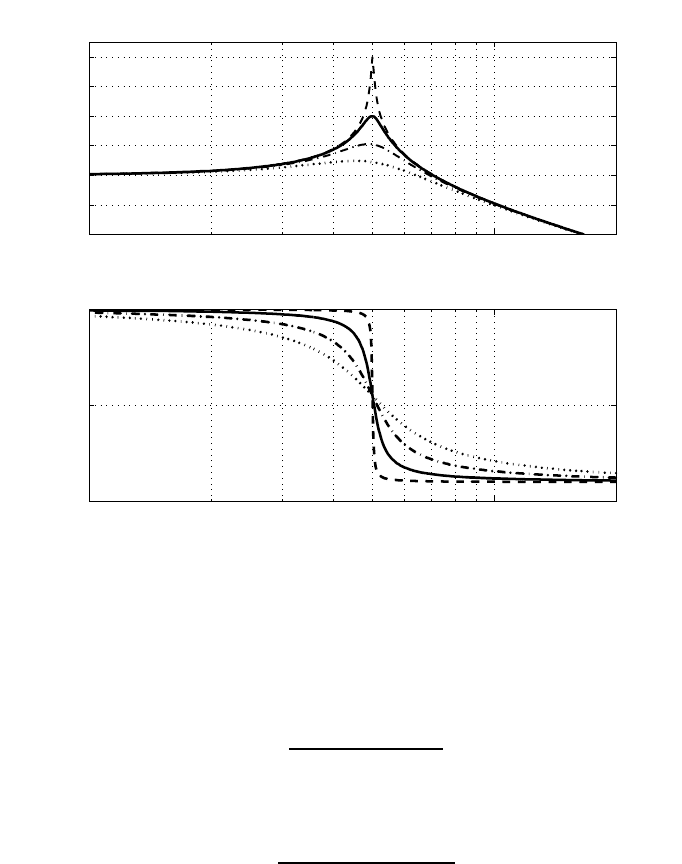
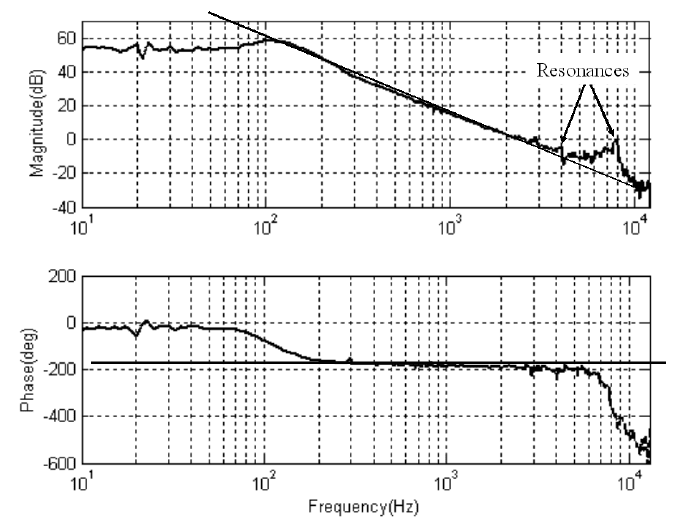
FIGURE 2.3
Measured VCM Bode plots (straight lines: pure d ouble integrator k/s
2
).
Modeling of Disk Drive System and Its Vibration 23
Figur e 2.3 shows the measured frequency response of a VCM actuator system. By
curve fitti ng each resonant mode, one can obtain the parameters of the t ransfer func-
tion. The deviation fr om the double integrator model in low frequencies in Figure
2.3 is due t o the pivot f riction and other nonlinearities. The nonlinearity modeling
will be discussed in detail in the next section.
Consider the resonance model in (2.7) ((2.6) and ( 2.8) can be handled similarly).
˙y = k
y
v, (2.9)
˙v = k
v
b
1
ω
n
s + b
0
ω
2
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
u. (2.10)
Define
x
1
=
ω
2
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
u, x
2
=
sω
n
s
2
+ 2ξ
n
ω
n
s + ω
2
n
u, (2.11 )
i.e.,
˙x
1
= ω
n
x
2
. (2.12 )
Then, we have a state-space description
˙y
˙v
˙x
1
˙x
2
=
0 k
y
0 0
0 0 k
v
b
0
k
v
b
1
0 0 0 ω
n
0 0 −ω
n
−2ξ
n
ω
n
y
v
x
1
x
2
+
0
0
0
ω
n
u. (2.13 )
More resonance modes can be modeled similarly.
Assume that nonlinearities such as friction and bias force and resonances are prop-
erly compensated, the actuator model is a double integrator model. It is wr itten as
˙y
˙v
=
0 k
y
0 0
y
v
+
0
k
v
u. (2.14 )
On the other hand, to make the mathematical models more realistic, we need to
consider uncertainties inh erent in the plant model. Note that it is difficult to involve
all high-frequency dynamics i n a model -based servo control design. In this case, an
uncertainty is introduced in the plant model. For instance, a model with multiplica-
tive uncertainty can be given by P = (1+∆)P
n
. Fig ure 2.4 shows the multi plicative
uncertainty ∆ of a VCM. To meet the robustness requirement against this u nmodeled
high frequency dynamics, we need to properly handle the uncertain system so that it
can perform under strict er margins.
2.3.2 Modeling of friction
In this section, we focus on friction modeling. There are basically two kinds of
methodologies for friction control in the literature: Model-based fricti on compen-
sation and non-model based f riction control. Friction models for the former can be