Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

xx Modeling and Control of Vibration in Mechanical Systems
12.8 |Φ| versus frequency. . . . . . . . . . . . . . . . . . . . . . . . . . 239
12.9 3σ of PES NRRO. . . . . . . . . . . . . . . . . . . . . . . . . . . 240
12.10 Frequency response of the H
2
controller. . . . . . . . . . . . . . . 241
12.11 Frequency response of the open-l oop system with the H
2
controller. 241
12.12 Comparison of sensitivity functions. . . . . . . . . . . . . . . . . . 242
12.13 σ value o f PES NRRO versus track number. . . . . . . . . . . . . . 243
12.14 2-D controller for SSTW servo loop. . . . . . . . . . . . . . . . . 245
12.15 σ of PES NRRO versus track number. . . . . . . . . . . . . . . . . 246
12.16 Open-loop frequency response with stabil ization controller. . . . . 24 6
12.17 Sensitivi ty function with stabilization controll er (A
c2
, B
c2
, C
c
, D
c
). 247
12.18 Frequency response of controller (A
c2
, B
c2
, C
c
, D
c
). . . . . . . . . 248
12.19 Open-loop frequency response with controller (A
c2
, B
c2
, C
c
, D
c
). . 24 9
12.20 Sensitivi ty function with controll er (A
c2
, B
c2
, C
c
, D
c
). . . . . . . 249
12.21 Step respon se (Channel 1/2 /3: Reference/Output /Control signal). . 250
13.1 Friction compensation fo r the actuation system. . . . . . . . . . . . 252
13.2 Input u versus di splacement x with and wit hout compensation. . . . 253
13.3 Actuat or frequency responses with and without friction compensa-
tion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253
13.4 Actuat or frequency responses with fricti on compensation fo r differ-
ent displacements in voltage with 0. 5µm/V (Straight smooth lines:
the pur e double integrator). . . . . . . . . . . . . . . . . . . . . . . 25 4
13.5 Actuat or frequency responses with fricti on compensation fo r differ-
ent disp lacements in voltage wi th 0.5 µm/V (Straight smoot h lines:
the pur e double integrator). . . . . . . . . . . . . . . . . . . . . . . 25 4
13.6 Sensitivity functions with and without friction compensation. . . . . 255
13.7 Control structure of a plant P (s) with Youla parametrization ap-
proach and adaptive nonlinear compensation. . . . . . . . . . . . . 256
13.8 Comparison of error rejection frequency response without and with
u
N
of different p and Γ. . . . . . . . . . . . . . . . . . . . . . . . . 258
13.9 NR RO power spectrum with KYP lemma-based linear contro l and
nonlinear compensation (80% reduct ion before 400 Hz). . . . . . . 259
14.1 Experi mental setup. . . . . . . . . . . . . . . . . . . . . . . . . . . 263
14.2 Frequency response of the VCM actuator measured by injecting a
swept sine wave of 5mV amplitude. . . . . . . . . . . . . . . . . . 263
14.3 The servo loop i n experiment. . . . . . . . . . . . . . . . . . . . . 2 64
14.4 Frequency response of the controller C(z). . . . . . . . . . . . . . 264
14.5 Frequency response of the sensitivity function S(z) with different
reference levels (i.e., actuator moving ranges are different). . . . . . 265
14.6 Frequency response of the quantizer before and after compensation
(bit number n = 6). . . . . . . . . . . . . . . . . . . . . . . . . . . 267
14.7 Frequency response of the quantizer with compensation (bit number
n = 8). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 267
List o f Figures xxi
14.8 Frequency response of the quantizer with compensation (bit number
n = 1 0). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
14.9 Measured sensitivity function S
Q
(z) with different bits n. . . . . . . 268
14.10 Sensitivi ty function |S
Q
(f)| with f = 10 Hz versus bit n. . . . . . 269
14.11 Compensati on scheme of quantization effect. . . . . . . . . . . . . 270
14.12 Choosing the threshold δ and the scaling factor a. . . . . . . . . . . 270
14.13 Sensitivi ty function with quantization compensation. . . . . . . . . 271
15.1 Block diagram of FXLMS algorith m. . . . . . . . . . . . . . . . . 276
15.2 Filtered-X LMS adaptive feedback algorithm. . . . . . . . . . . . . 279
15.3 Adaptive inverse control scheme. . . . . . . . . . . . . . . . . . . 279
15.4 Block diagram of 2 × 2 adaptive feedback algorithm. . . . . . . . . 282
15.5 Block diagram of 6 × 1 FXLMS adaptive feedback control system. 283
15.6 General l ayo ut of the experimental setup. . . . . . . . . . . . . . . 286
15.7 60 Hz error signal in dB unit. . . . . . . . . . . . . . . . . . . . . 287
15.8 210 Hz error signal in dB unit. . . . . . . . . . . . . . . . . . . . . 287
15.9 240 Hz error signal in dB unit. . . . . . . . . . . . . . . . . . . . . 288
15.10 270 Hz error signal in dB unit. . . . . . . . . . . . . . . . . . . . . 288
15.11 Simulink diagram of automatic gain control. . . . . . . . . . . . . 291
15.12 180 Hz error signal without automatic gain control. . . . . . . . . . 2 92
15.13 180 Hz error signal with automatic gain control. . . . . . . . . . . 292
Symbols and Acronyms
R
n
: n-dimensio nal real Euclidean space
R
n×m
: set of n × m real matrices
I
n
: n × n identity matrix
(A, B, C, D): state-space representation of a system
A
B
1
B
2
C
1
D
11
D
12
C
2
D
21
D
22
: compact representation of system:
x(k + 1) = Ax(k) + B
1
w(k) + B
2
u(k)
z(k) = C
1
x(k) + D
11
w(k) + D
12
u(k)
y(k) = C
2
x(k) + D
21
w(k) + D
22
u(k)
diag{A
1
, A
2
, ···, A
n
}: block diagon al matrix with A
j
( not necessarily
square), j = 1, 2, ···, n, on the diagonal
X
T
: transpose of matrix X
X
∗
: complex conju gate transpose of matri x X
P ≥ 0: symmetric positive semidefinite matrix P ∈ R
n×n
P > 0: symmetric positive definite matrix P ∈ R
n×n
P ≥ Q: P − Q ≥ 0 for symmetric P, Q ∈ R
n×n
P > Q: P − Q > 0 for symmetric P, Q ∈ R
n×n
¯σ(X): largest singular value of X
Trace(X): trace of X
k · k: Euclidean vector norm
kwk
2
: ℓ
2
-norm of a si gnal {w(k)}, i.e.,
s
∞
P
k=0
kw(k))k
2
.
xxiii

xxiv Modeling and Control of Vibration in Mechanical Systems
ℓ
2
{[0, ∞)}: space of square summable sequences on {[0, ∞)}.
The signal {w(k)} is said to be from ℓ
2
{[0, ∞)}or simply ℓ
2
if kwk
2
< ∞.
kGk
2
: H
2
norm of transfer function G
kGk
∞
: H
∞
norm of transfer function G
Re( ): the real part of a complex number
Im( ): the imagin ary part of a complex number
ρ( ): spectral radius
AGC : automatic gain con trol
AV C : active vib ration contro l
deg: degree
det: determinant
DSA: Dy namic Signal Analyzer
F F T : fast Fourier transform
F XLMS: filtered-X LMS
HDD: hard disk drive
LDV : Laser Dopp ler Vibrometer
LF T : Linear fractional transformation
LMI: linear matrix inequality
LMS: least mean square
LQG: linear quadratic Gaussian
LT R: loop transfer recovery
MEM S: micro electro-mechanical system
MSE: mean square error
NRRO: nonrepeatable runout
P ES: position error signal

Symbols and Acronyms xxv
P ID : proportional-integral- derivative
P LP F : phase lead peak filter
P ZT : lead zirconate titanate/piezoelectric
RBF : radial basis function
RM S: root mean square
RP M : rotations per min ute
RRO: repeatable runout
SST W : self-servo track writing
ST W : servo t rack writing
T M R: track misregistration
V CM : voice coil motor

1
Mechanical Systems and Vibration
When studying mechanical systems, we have t o include the subject of dyn amics and
vibration. Dynamics is a branch of mechanics th at deals with motion and its effect on
a bo dy. Unlike statics, wh ich deals with bodies at rest, dynamics takes into account
the effect of velocities and accelerations on the forces acting on bodies. Vibratio n is
regarded as a branch of dynamics, since forces and masses are taken into account in
vibration analysis. Thus it is natural that both dynamics and vibrations of mechanical
systems are studied in this book.
A vibr ation may be a signal, force, or temperature variation that affects the re-
sponse of a system in an unacceptable manner. If our analysis of sy stem response to
a vibration sh ows th at it regularly affects the system performance in an unacceptable
manner, we need to alter or control the vibratio n response and bring the response
within acceptable levels by addin g appropriate forces, called control forces which
are functions of system response such as displacement. This may require a design
by usi ng the value of the system response to generate add itional forces according to
certain rules or laws such that the modified response behaves according to desired
performance and within certain bounds. This results in a closed-loop system that
incorporates feedback controls. The purpose of d esigning a system with feedback
force is to minimize unwanted behavior. Examples include magnetic recording sys-
tems, Stewart platforms, positioning stages [27], the atomic force microscope (AFM)
[28], industry robot s [ 29], as well as some automotive systems [34]. The magnetic
recording system and Stewart platform are examples to be presented next to help
in fixing these ideas more firmly. With such a grou nding, more advanced problems
become accessible.
1.1 Magnetic recording system
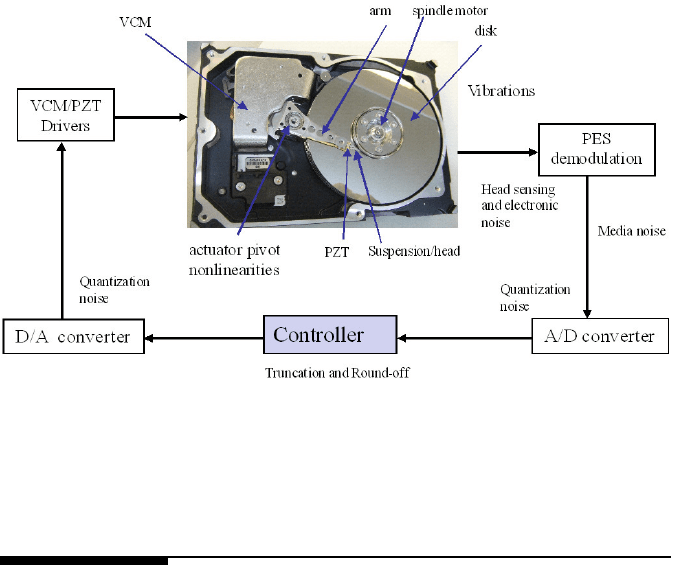
Figur e 1.1 shows a servo control loop of a hard disk drive (HDD) with a voice coil
motor (VCM) and a piezoelectric (PZT) actuated servo system. It consists of a stack
of flat rotating disks with position ing information or servo information embedded in
their surfaces. The servo information is used to position the magnetic heads on the
disk surfaces. Position measurement of the magnetic heads is achieved by means o f
analyzing the po sition error signal (PES) calculated from the read back signal. To
1
2 Modeling and Control of Vibration in Mechanical Systems
have a disk d rive with a high storage capacity, the head positioning error with re-
spect to the target track center needs to be as small as possible. The error is mainly
due to, (1) t orque disturbances from spindle motor, (2) actuator pivot friction, (3)
airflow-induced non-repeatable di sk, suspension and slider vibrations, (4) mechani-
cal resonance vibr at ion, and (5) head sensing and electronic noises, media noise, and
quantization noises. Hence how to deal with the variety of the disturbances is crit-
ical to the head positioning accuracy, and subsequently the t rack density for a high
capacity disk drive.
FIGURE 1.1
The servo control loo p of a hard disk drive.
1.2 Stewart platform
The six- leg parallel linkage mechanism known as the “Stewart platform” was dis-
covered as early as in 1965 [30]. I t is desig ned according to a cubic configuration,
consisting of two tri ang ular parallel plates connected to each other by six active legs
orthogonal to each other. Each leg is equipped with a voice coil actuator, a force
sensor and two flexible joints. The closed k inematical linkage structure of a Stewart
platform has major advantages over any serial link robots: great rigidity, hig h force
to weight ratio, six d egrees of freedom (DOF), etc. [31] The Stewart platfor m i s
Mechanical Systems and Vibration 3
widely used as space born structures, as well as a high precision pointing device and
vibration isol at or.
Stewart platforms can be divided into two main classes according to the stiffness
of the legs: stiff type and soft type. For the soft design, each leg essentially acts as
an axial sp ringing parallel with a voice coil actuator, while the stiff design involves
piezoelectric or magneto restrictive legs whose extensions can b e controlled [32].
The Stewart platform has been widely used in active vibration control. It has an
important property for vibration control application: forces transmitted between the
mobile plate and th e b ase plate are totally axial forces of actuators. Thi s implies that
if the axial forces can be measured and eliminated, the vi bration created by these
forces can thus be eliminated. Thus the Stewart platform has become one of the
most popu lar approaches for 6-DOF active vibration control in pr ecision systems
due to its attractive properties.
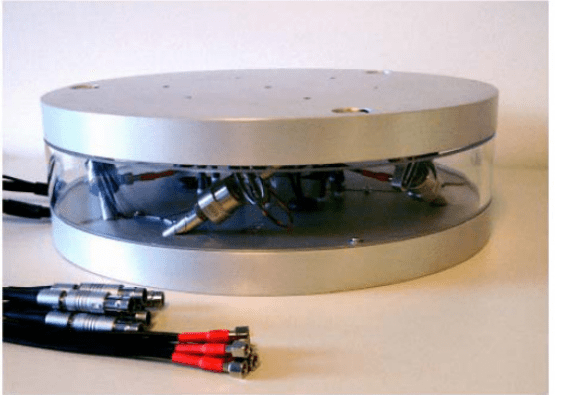
FIGURE 1.2
Hexapod from Micromega Dynamics.
The Stewart platform (Hexapod) from Micromega-Dynamics used as a vibration
isolat ion device is shown in Fi gure 1.2. The hexapod has a cubic archi tecture and
consists of two parallel plates connected to each other by six active legs. The plates
are made of aluminum with a thickness of 20 mm and diameter of 250 mm, with
the weight of the mobile plate at 1 kg. Each leg of the active interface consists of
a linear piezoelectric actuator, a collocated fo rce sensor, and flexible tips to connect
the two end plates. Flexible tips are u sed in order to avoid the problem of friction and
backlash, which comes with the use of spherical joints. The hexapod can be used to