Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

4 Modeling and Control of Vibration in Mechanical Systems
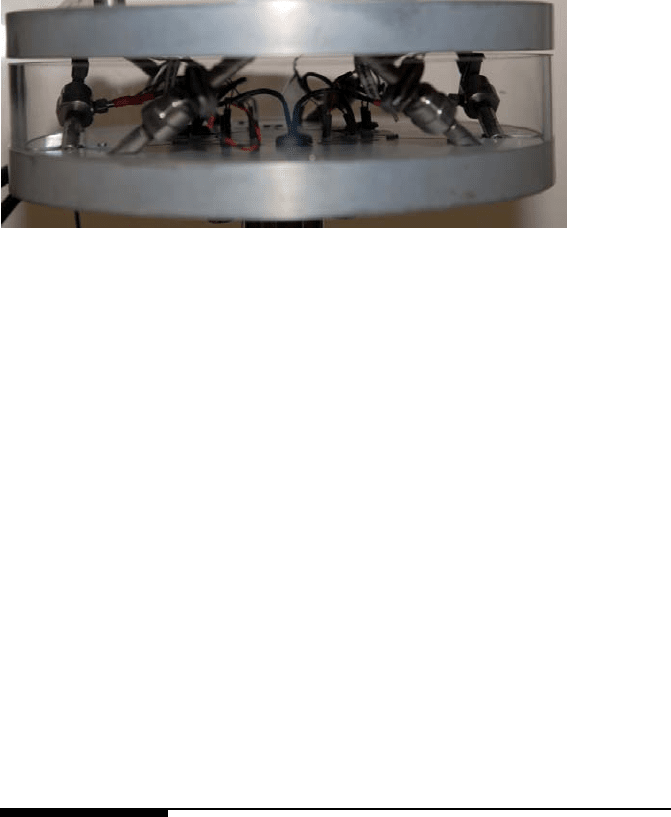
FIGURE 1.3
Zoomed-in view of the hexapod.
actively increase the str uctural damping of flexible systems at tached t o it.
Figur e 1.3 shows the zoomed-in view of the inside of the hexapod, revealing th e
arrangement of the six collo cated sensor-actuator legs. The wires shown in Figure
1.2 are the outp uts of the for ce sensors (each for one sensor) and inputs to the piezo-
electric actuato rs (each for one actuator), respectively.
Each of the legs i n the Stewart p latform consists of a PZT force sensor and an
amplified PZT actuator. They form a collocated sensor-actuator pair configuration.
If an actuator and a sensor are collocated, the associated signals for the actuator
and sensor are power conjugated, i.e., the product of the actuated velocity and the
measured force represents the power that is extracted from the mechanical structure.
A collocated actuator-sensor pair thus enables the control of power that is supplied
to the mechanical structure. Collocated actuator-sensor pairs are suitable in active
vibration control applications in the sense that they guarantee damping and stability
robustness if design ed properly [33].
In this book, the modeling and v ibration controls for the magnetic recording sys-
tem and the Stewart platform will be detailed.
1.3 Vibration sources an d descriptions
Any oscillatory motion of bodies that repeatedly appears is called vibration or os-
cillation. There are usually forces associated with vibrations. They can be induced
by various types of excitation. Some of them are: fluid flow; rotating unbalanced
machi nery; str ucture flexible modes; electrical torque; reciprocating machinery; mo-
tion induced in vehicles traveling over u neven surfaces; and ground motion caused
by earthquakes.
Flow induced vibration is generated by the forces exerted on an object by fluid
motion. Such situati ons can be complicated by the fact that the motion of the vibrat-
Mechanical Systems and Vibration 5
ing object can alter the fluid flow conditions, thus changing the fluid forces. Another
complicating factor is the mass of the fluid, which increases the effective mass of the
system. Examples of vib ration caused b y flui d motion inclu de: wave action on struc-
ture; vortex-induced vibration such as vibration of transmission cables, underwater
cables used for towing and str uctural sup port, and cooling towers and chimneys; vi-
bration caused by internal flows, such as air flow in hard d isk drives, flow through
pipes and hoses having bends; structural vibration caused by fluctuating aerodynamic
forces such as t urbulence [ 1][56]. In certain si tuations, the steady-state excitation
force due to fluid motion is sinu soidal with an amplitude proportional to the square
of the forcing frequency. A model of the system u ndergoing such excitation is
m¨x + c ˙x + kx = F
0
ω
2
sinωt, (1.1)
where m is the system mass, x is the system response, ω is the forcing frequency, k
and c are respectively stiffness and damping, and F
0
is the fo rce coefficient. Furth er
analysis of system response to flow fluid motion is qu ite complicated and requires
detailed consi deration of fluid mechani cs of the system.
Some oscillatory systems have simple harmonic motion of the form
y(t) = Bsin(ωt) + Ccos(ωt), (1.2)
where y(t) is the displacement of a mass, and is equ ivalent to
y(t) = Asin(ωt + φ), (1.3)
A =
p
B
2
+ C
2
, (1.4)
cos(φ) =
B
A
, sin(φ) =
C
A
. (1.5)
There occur some oscillations having exponential amplitude as follows:
y(t) = Ae
rt
sin(ωt + φ), (1.6)
where oscil lation amplitude decays exponentially when r < 0, and grows i ndefi-
nitely when r > 0.
Many types of motion cannot be easily represented by simple functions because
they are essential ly random. Examples include air turbulence to arm and suspension
in hard disk drives, ground motion due to an earthquake, and base motion that occurs
when a vehi cl e travels over an u neven surface. It is possible, however, to characterize
them by means of statistical averages and spectrum plots, in which Fourier analysis
is used to identify the major frequency components in the v ibration and they will be
described in more detail in the later part of the chapter.
1.4 Types of vibration
There are several ways to categorize vibrations. Basically, they can be calssified as
follows.
6 Modeling and Control of Vibration in Mechanical Systems
1.4.1 Free and forced vibration
If a system vibrates on its own aft er an i nitial di sturbance and no ext ernal force acts
on it, the ensuing vibration is known as f ree vibration. A direct example of free
vibration is the oscillation of a simple pendulum.
If a system vibration is due to an external force, the arising vibratio n is k nown as
forced vib ration. The oscillation in machines such as diesel engines that results from
an external force is an example of forced vibration. If the f requency of the external
force coin ci des with one of the natur al f requencies of the system, the p henomenon
known as resonance occurs, and the system undergoes oscillation. The occurrence of
that resonance causing large oscillation may lead to failu res of some str uctures such
as buildings, bridges, turbines, and airplane wings.
1.4.2 Damped a nd undamped vibration
If durin g oscillation there is no energy lost or dissipated in friction or other resistance,
the vibration is known as undamped vibration. On the other hand, if there is energy
lost during oscillation, it is called damped vibration. When analyzing vibration near
resonance in physical systems, consideration of damping becomes extremely impor-
tant.
1.4.3 Linear and nonlinear vibration
If all the b asic components in a vibratory system such as sprin g, mass and damper
behave linearly, the resulting vibr at ion is classified as linear vibration. On the o ther
hand, if any of the basic components behaves nonlin early, the vibration is categorized
as nonlinear vibration. Linear and nonlinear differential equations are used to govern
the behaviors of lin ear and n onlinear vibratory systems, respectively. If a vibration is
linear, the principle of linear systems such as superpositio n holds, and there are well
developed mathematical tool s for analysis. As for nonlinear vibration, the superposi-
tion principle is n ot valid, and techniques of analysis are more complicated and less
well known. Since all vibratory systems tend to behave nonlinearly with respect to
amplitude level o f oscillation, some knowledge of nonlinear vibration is desirable in
dealing with practical vibratory systems. A s is known, a d escribing function is one
approximation metho d used to analyze nonlinear vibratory systems.
1.4.4 Deterministic and random vibration
A vibration is known as det erministic vibration if it results from an excitation with
value or amplitude known at any given time. In some cases, the excitation acting on
a vibratory system is nondeterministic or random, and the value of the excitation at
a given time cannot be predicted. In these cases, a large amount of excitation dat a
collected may exhibit some statist ical regularity. Statistical methods can be used for
analysis, as it is possible to estimate averages such as the mean and vari ance values
of the random excitation. Examples of random excitations are air flow inside hard
Mechanical Systems and Vibration 7
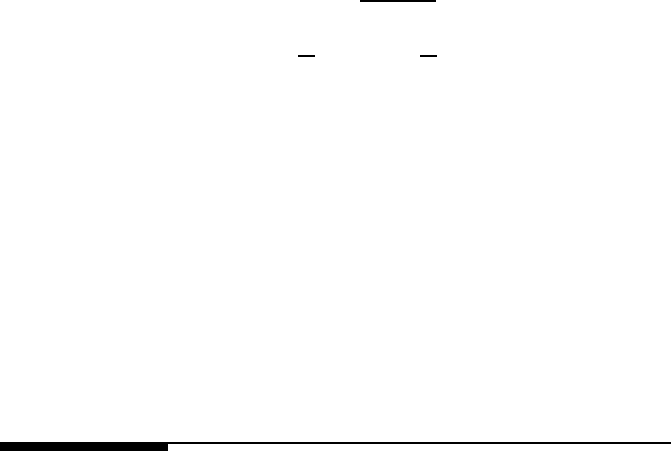
disk drives, road roughness and gro und motion during earthquakes. If the excitation
is random, the induced vibration is called random vibration, such as that shown in
Figur e 1.4. It can be described in terms of statistical quantities.
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Time(sec)
Vibration signal
FIGURE 1.4
An example of rando m vibration.
1.4.5 Periodic and nonperiodic vibration
Periodi c vibrati on can be represented by Fourier series as superposition of harmonic
components of vari ous frequencies. That is, i f x(t) is a periodic fu nction with period
τ, its Fourier series representation is given by
x(t) =
a
0
2
+ a
1
cos(ωt) + a
2
cos(2ωt) + ··· + b
1
sin(ωt) + b
2
sin(2ωt) + ...
=
a
0
2
+
∞
X
n=1
(a
n
cos(nωt) + b
n
sin(nωt)), (1.7)
where ω = 2 π/τ is the fundamental frequency, and a
0
, a
n
, b
n
are constant coeffi-
cients given by
a
0
=
ω
π
Z
2π /ω
0
x(t)dt =
2
τ
Z
τ
0
x(t)dt, (1.8)
8 Modeling and Control of Vibration in Mechanical Systems
a
n
=
ω
π
Z
2π /ω
0
x(t)cos(nωt)dt =
2
τ
Z
τ
0
x(t)cos(nωt)dt, (1.9)
b
n
=
ω
π
Z
2π /ω
0
x(t)sin(nωt)dt =
2
τ
Z
τ
0
x(t)sin(nωt)dt. (1.10 )
Let
c
0
=
a
0
2
, (1.11 )
c
n
= (a
2
n
+ b
2
n
)
1/2
. (1.12 )
The root mean square (RMS) value of the periodic function x(t) can be determined
as
RM S(x(t)) =
v
u
u
t
∞
X
n=0
|c
n
|
2
. (1.13 )
Thus the mean sq uare value of x (t) is given by the sum of the squares of the absolute
values of the Fourier coefficients. Equation (1.13) is known as Parseval’s formula for
periodic functio ns.
Although the series in (1.7) is an infinite sum, most periodic functions can be
approximated by only a few harmonic functions.
A nonperiodic v ibration x(t) can be represented by the integral Fourier transform
pair:
x(t) =
1
2π
Z
∞
−∞
X(ω)e
iωt
dω (1.14)
and
X(ω) =
Z
∞
−∞
x(t)e
−iωt
dt. (1.15 )
The RMS value of the nonperiodic funct ion x(t) can be determined as
RM S(x(t)) =
s
Z
∞
−∞
|X(ω)|
2
2πτ
dω. (1.16 )
Equation (1.16) is known as Parseval’s formula for nonperiodic functions.
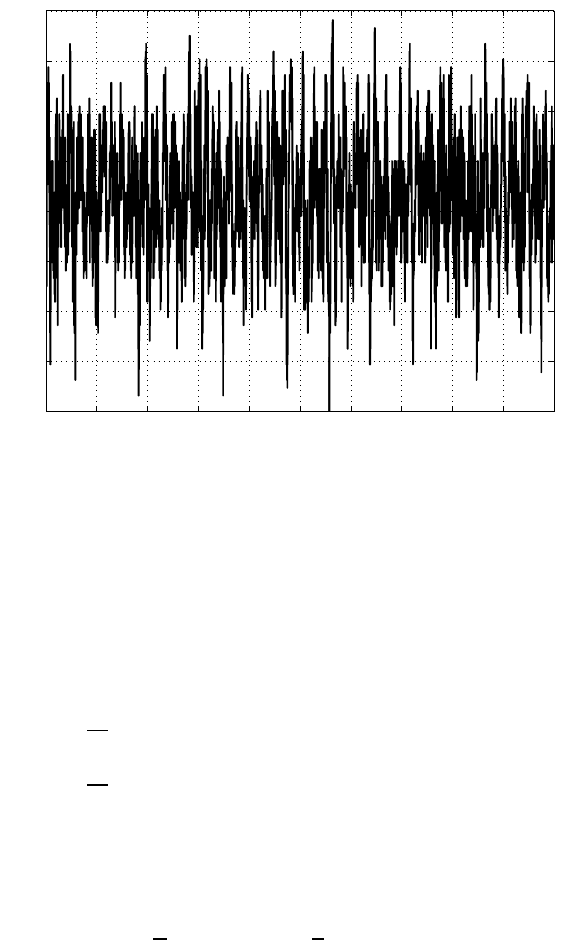
1.4.6 Broad-band and narrow-band vibration
A broad-band vibration is a stationary random process whose spectral density func-
tion has significant values over a range or band of frequencies which is appr oximately
of the same order of magnitude as the center frequency of the band. The density in
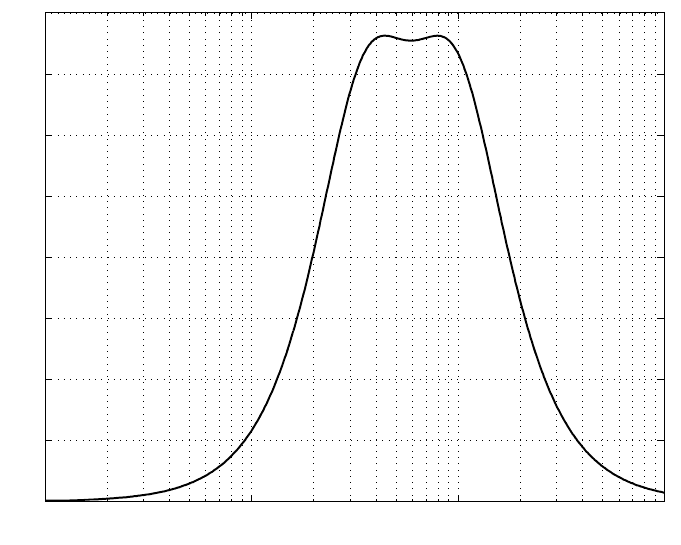
Mechanical Systems and Vibration 9
Figur e 1.5 describes a broad-b and vibration, which is composed of components con-
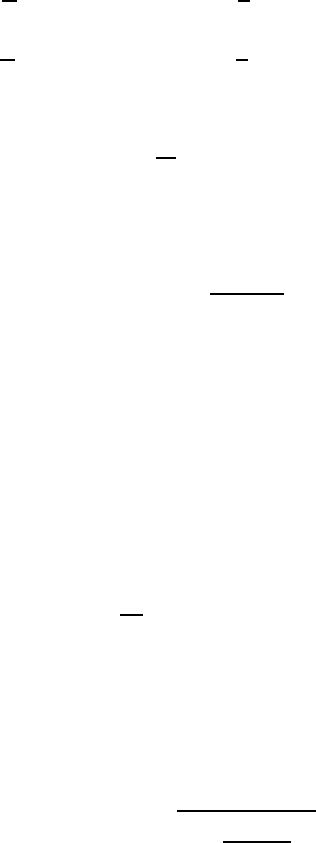
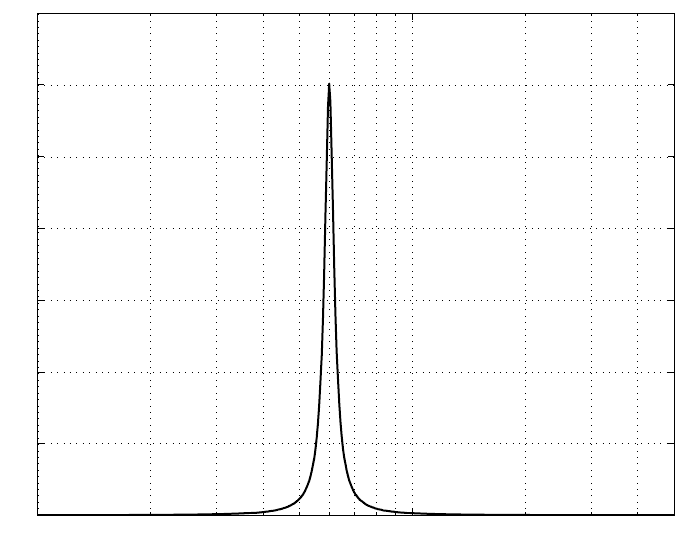
taining frequencies over a wide or b road frequency range. A narrow-band rando m
vibration is a st ationary vibr at ion whose spectral density function has significant val-
ues only in a range o f frequency whose width is small compared to the magnitude
of the center frequency. Figure 1.6 shows a vibration containing frequencies over a
narrow band.
10
1
10
2
10
3
10
4
0
2
4
6
8
10
12
14
16
Frequency(Hz)
Magnitude(dB)
FIGURE 1.5
Spectrum density of broad-band vibration .
A random process whose power spectral density is constant over a frequency range
is called w hite noise. It is called ideal white noise if t he band of frequ encies is
infinitely wide. An ideal white noise is physically unrealizable, since the variance of
such a rando m process would be infin ite because the area under the spectrum would
be infinite. It is called band-limited white noise if the band of frequencies has finite
cut-off frequencies ω
1
and ω
2
. The variance of a band-limited white noise is given
by the total area under the spectrum, namely, 2S
0
(ω
2
− ω
1
), where S
0
denotes the
constant value of the spectral density.
10 Modeling and Control of Vibration in Mechanical Systems
10
2
10
3
0
1
2
3
4
5
6
7
Frequency(Hz)
Magnitude(dB)
FIGURE 1.6
Spectrum density of narrow-band vibratio n.
Mechanical Systems and Vibration 11
1.5 Random v ibration
1.5.1 Random process
In contrast to deterministic excitations, in many applications the inputs are not well
known and can be described only in terms of statistical measures such as mean value,
variance and standard deviation .
Mean value
The average is called the mean or expected value, often represented by µ. For dis-
crete values, such as those pro duced by digital data acquisition , the mean is defined
as
E(x) =
1
n
n
X
j=1
x
j
. (1.17 )
For a continuous function x(t), the mean is
E[x(T
d
)] =
1
T
d
Z
T
d
0
x(t)dt (1.18 )
where the time duration of the data sample is T
d
.
Variance
Two signals may have the same mean value but one may fluctuate with greater
amplitude about th e mean. So we also need a measure of the range of fluctuation.
Simply specifyin g the minimum and maximum values is insufficient because a single
large fluct uation (above or b el ow the mean) can be misleading. A measure that
indicates the spread about the mean is the variance, which is defined as t he average
value of the sq uare of the difference betw een the sig nal and its mean. The variance
is calculated for a discrete signal as follows.
var(x) = σ
2
=
1
n
n
X
j=1
(x
j
−µ)
2
, (1.19 )
where σ
2
is the variance and σ is called the standa rd d eviation.
For a sig nal continuous in time, the variance is calculated fro m
var(x , T
d
) =
1
T
d
Z
T
d
0
[x(t) − µ]
2
dt. (1.20)
The mean-square value of x is the expected value of x
2
and is deno ted E(x
2
). The
RMS value of x is
p
E(x
2
). The relation between the variance, the mean square,
and the mean is as follows.
σ
2
= E(x
2
) − [E(x)]
2
. (1.21 )

12 Modeling and Control of Vibration in Mechanical Systems
If the mean of x is zero, the standard deviation σ
x
of x is calculated from
σ
x
=
p
E(x
2
), (1.22)
and is thus the same as the RMS value.
A random input will generate a random response, and the output signal given by
its sensor will appear to be random. Random signals, like the example shown in
Figur e 1.4, have no apparent pattern and never repeat. Another characteristic of a
random signal is that it is impossi ble to predict what the signal will be in the fut ure,
even if we h ave the past values of the signal.
1.5.2 Stationary random process
A special case of a random process is one that is station ary, which means that its
statistical properties (such as its mean and variance) are time-independent.
If x(t) is stationary, its mean and covariance will b e independent of t:
E[x(t)] = E[x(t + τ )] = µ, (1.23)
and
E[x(t)x(t + τ )] = σ
xx
(τ). (1.24)
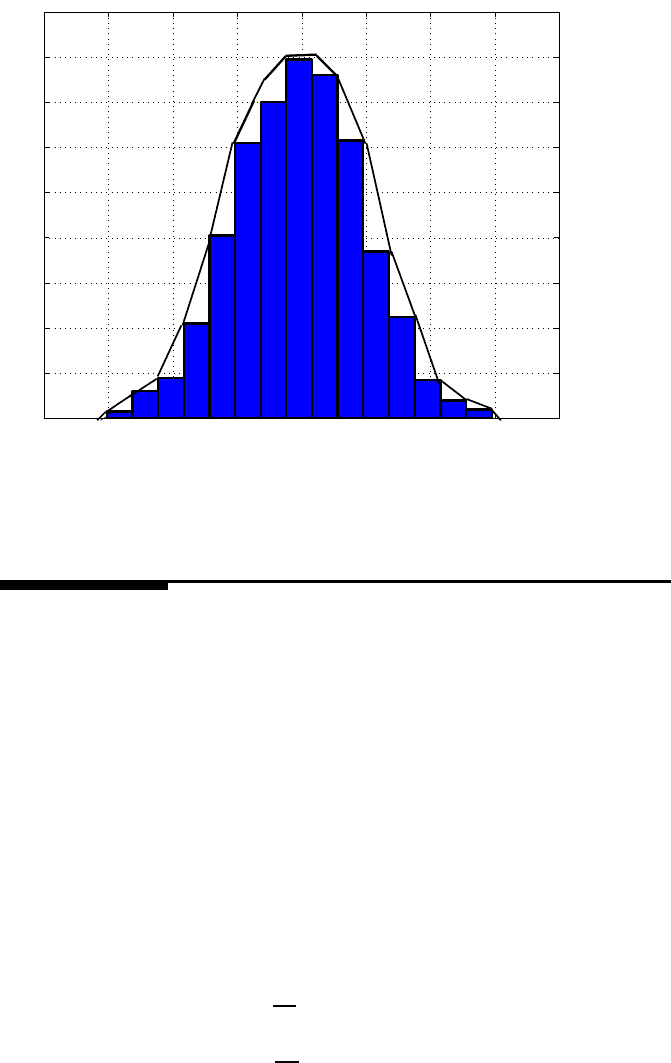
1.5.3 Gaussian random process
A Gaussian or normal random process has a number of remarkable properties that
permit the computation of random vibration characteristics in a simple manner. The
probability density function of a Gaussian process x(t) is given by
p(x) =
1
√
2πσ
x
e
−
1
2
(
x−¯x
σ
x
)
2
, (1 .25)
where ¯x and σ
x
denote the mean value and standard d eviation of x. The mean ¯x and
standard deviation σ
x
of x(t) vary with t for a nonstationary process but are con stants
for a stationary process. A very important property o f a Gaussian process is that the
form of its probability distri bution is invariant with respect to linear operations. This
means that if the excitation of a linear system is a Gaussian process, the steady-state
response is generall y a different random process, but still a normal one. The only
changes are that the magnitude of the mean and standard deviation of the response
are different from those of the excitation.
The graph of a Gaussian probability density function has a bell-shaped envelope
as seen in Fig ure 1.7, and i s symmetric about the mean value; its spread is governed
by t he value of the st and ard deviat ion.
Mechanical Systems and Vibration 13
−4 −3 −2 −1 0 1 2 3 4
0
20
40
60
80
100
120
140
160
180
Signal x
Probability density
FIGURE 1.7
Histo gram of signal x.
1.6 Vibration analysis
1.6.1 Fourier transform and spectrum analysis
We know that a periodic signal can be expressed as a Fourier series of h armonic
functions. The Fourier series coefficients, when plotted versus fr equ ency, gives a
plot of the sp ectrum of the signal. The spectrum graphically di splays the frequency
content of the signal.
A nonperiodic function is expressed wi th the f ollowing Fourier transfor m p ai r:
x(t) =
Z
∞
−∞
a(ω )cos(ωt)dω +
Z
∞
−∞
b(ω)sin(ωt)dω, (1.26 )
where
a(ω ) =
1
2π
Z
∞
−∞
x(t)cosωtdt, (1.27)
b(ω) =
1
2π
Z
∞
−∞
x(t)sinωtdt. (1.28)