Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.


74 Modeling and Control of Vibration in Mechanical Systems
0 500 1000 1500 2000 2500 3000 3500 4000
0
0.05
0.1
Frequency(Hz)
FFT(RRO)(Vrms)
1−disk
2−disk
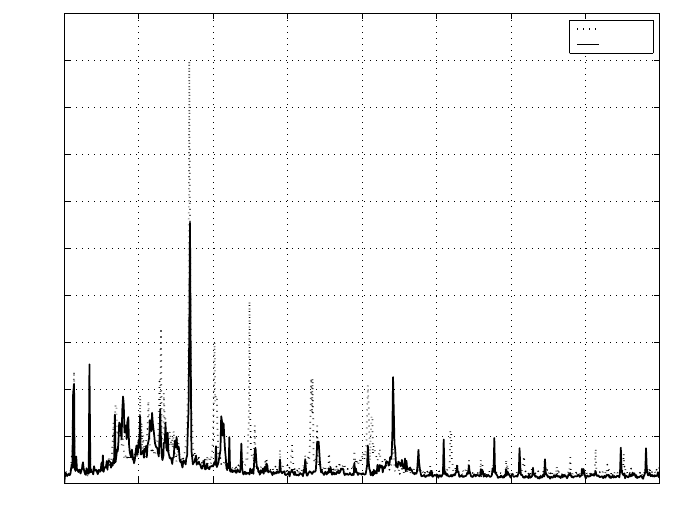
FIGURE 4.7
Comparison of single-disk and dual-disk RRO power spectrum at 8400 RPM (41%
improvement of σ value).
Classical Vibration Control 75
0 500 1000 1500 2000 2500 3000 3500 4000
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Frequency(Hz)
FFT(NRRO)(Vrms)
1−disk
2−disk
T6
T4
T3
T2
T1
T5
S1
S2(S3)
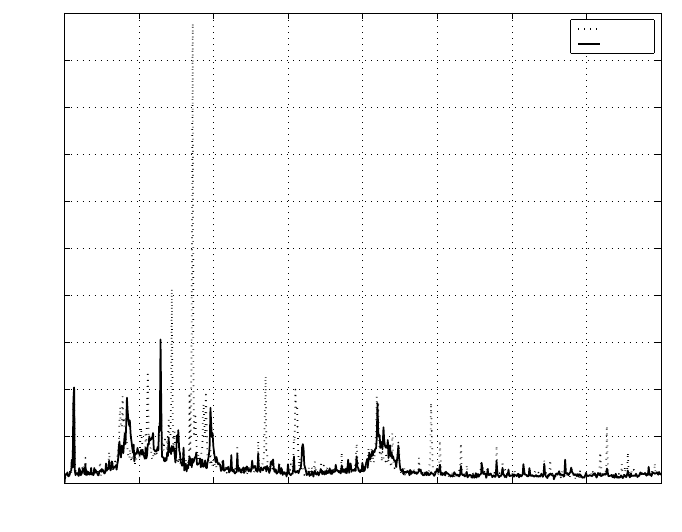
FIGURE 4.8
Comparison of single-disk and dual-disk NRRO power sp ectrum at 8400 RPM (28%
reduction of σ value).
76 Modeling and Control of Vibration in Mechanical Systems
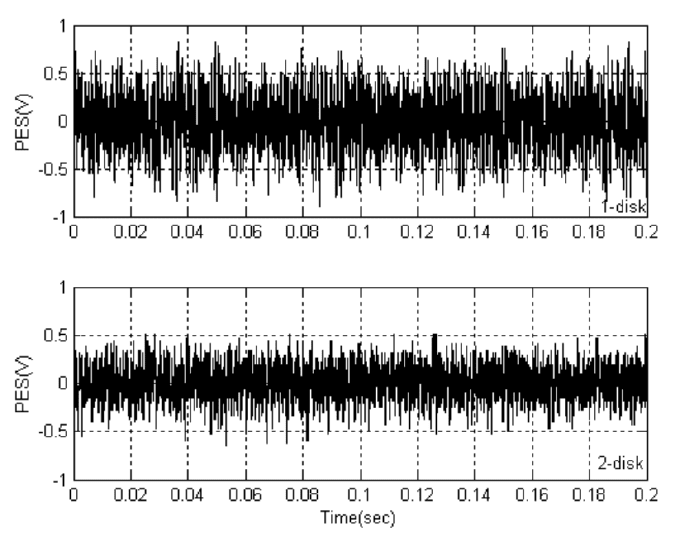
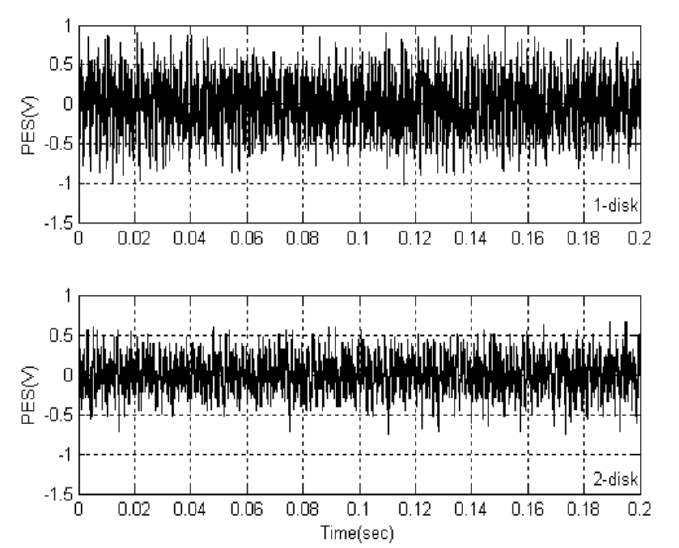
FIGURE 4.9
Comparison of sing le-disk and dual-disk PES in time domain at 8400 RPM (38%
reduction of σ value).
Classical Vibration Control 77
C. Positioning accuracy improvement at 10200 RPM
A higher rotational speed of 10200 RPM is performed on both the dual-disk stack
and single disk cases. Figure 4.10 shows the obtained disk axial vibration by LDV.
The modes T1-T6 are quite obviou s with the amplitude reduced and the frequencies
shifted higher. Figure 4.11 and Figure 4.12 show the power spectrum of RRO and
NRRO. The 3rd and 5th harmonics are significantly reduced as seen in Figure 4.11.
Figur e 4.12 reflects the corresponding disk vibrat ion modes T1-T6 in Figure 4.10.
As f or the slider related vibrations, S1 is redu ced significantly again and S2 and S3
are shif ted, while S4 cannot be seen at all i n Figure 4.12 . As a result, the σ value of
RRO is improved b y 33%, NRRO b y 27%, and PES by 32%, compared with that of
the single disk approach. Figure 4.13 shows the comparison of PES i n time domain,
and it is observed that the amplitude of PES in the case of the dual-disk stack is
decreased.
0 500 1000 1500 2000 2500 3000
−9
−8.5
−8
−7.5
−7
−6.5
−6
−5.5
−5
−4.5
Frequency(Hz)
Dsplacement amplitude(log10(m))
2−disk
1−disk
T3
T5
T4
T6
T2
T1
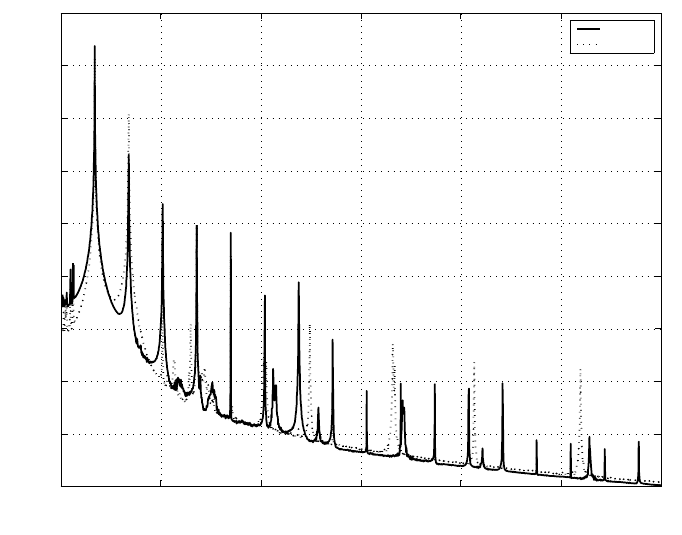
FIGURE 4.10
Comparison of single-di sk and dual-disk axial vibration s measured via LDV at
10200 RPM.
The reduction of disk vibration amplitude is evaluated from Figures 4.2, 4.6 and
4.10 and tabulated in Table 4.1 for different rotational speeds. The improvements of
78 Modeling and Control of Vibration in Mechanical Systems
0 500 1000 1500 2000 2500 3000 3500 4000
0
0.05
0.1
0.15
0.2
Frequency(Hz)
FFT(RRO)(Vrms)
1−disk
2−disk
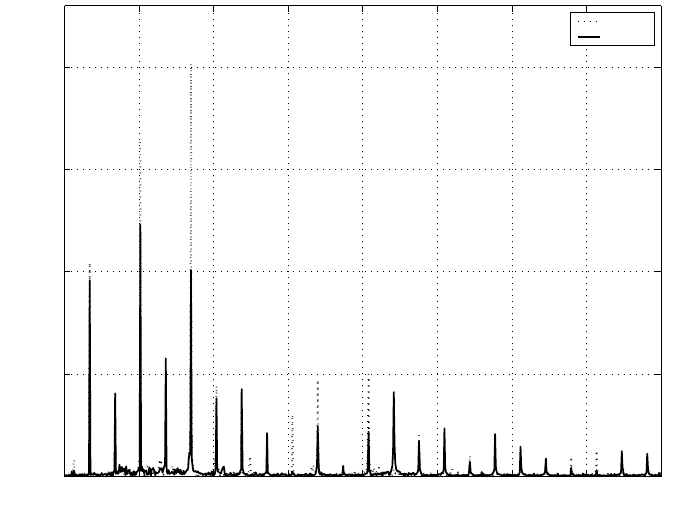
FIGURE 4.11
Comparison of single-disk and dual-disk R RO power spectrum at 10200 RPM (the
3rd and 5th harmonics reduced significantly, 33% improvement of σ value).
Classical Vibration Control 79
0 500 1000 1500 2000 2500 3000 3500 4000
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Frequency(Hz)
FFT(NRRO)(Vrms)
1−disk
2−disk
T1
T2
T3
T4
T6
T5
S1
S2
S3
FIGURE 4.12
Comparison o f single-disk and d ual-disk NRRO power spectrum at 10200 RPM
(27% reduction of σ value).
80 Modeling and Control of Vibration in Mechanical Systems
FIGURE 4.13
Comparison of single-disk and dual-disk PES in time domain at 10200 RPM (32%
reduction of σ value).
Classical Vibration Control 81
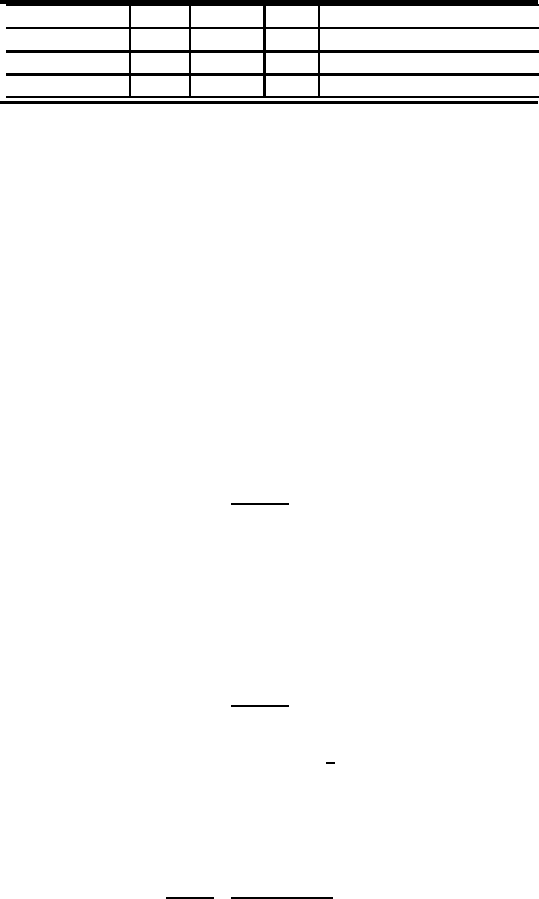
TABLE 4.1
% reduction of σ values of PES, RRO and NRRO and di sk
vibration amplitude with stacked disks compared with single disk
Speed(RPM) RRO NRRO PES Disk vib ration amplitude
7200 23 18 21 24
8400 41 28 38 45
10200 33 27 32 35
the σ values of RRO, NRRO and PES are also summarized i n Table 4.1. Remarkable
improvement is achieved for every rotati onal speed. It can be seen clearly from the
table that the best improvement is obtained when operating at 8400 RPM. The second
best result obt ai ned is performed at 10200 RPM, where the dual-d isk stack appro ach
leads to an improvement of 32% in p ositioning accuracy.
For al l t he cases studied, we have observed a remarkably reduced amplitude of the
disk vibration and its reflection in positi oning accuracy improvement via the dual-
disk stack. This indi cates that the stacked disk is a simple way of reducing the disk
vibrations in spin st and tests, particularly when a single disk surface is accessed.
In Figures 4.2, 4 .6, and 4.10, we have also observed the fr equency shifting of disk
vibration modes.
Theoretically the maximum amplitude of disk vibration is given by [22]
V ∝
ρR
4
ω
2
t
3
Ed
, (4.8)
where R is the disk outer radius, ρ is t he gas density, ω is the angular speed, t is
the disk thickness, E is the Young’s modulus of the di sk su bstrate, and d is the
disk substrate damping. Equat ion (4.8) indi cates that the disk vibration is inversely
proportional to t
3
. In the dual-d isk case, the disk stack th ickness
˜
t = 2t. Hence
assuming that the change of E is negligible, the amplitude of disk vibration
˜
V ∝
ρR
4
ω
2
8t
3
E
˜
d
, (4.9)
which means that
˜
V < V when the damping
˜
d >
1
8
d. The experimental results in
Figur es 4.2, 4.6 and 4.10 verified the amplitud e reduct ion o f the disk vi bration.
On the other hand, it is known that the natural frequency of disk vibration mode is
defined by [23]
f
mn
=
λ
2
mn
2πR
2
Et
3
12γ(1 − ν
2
)
1/2
, (4.10)
where f
mn
is the natural frequency of the (m, n) mode, γ is t he mass per un it area of
the disk, ν is the Poisson’s ratio, and λ
mn
is the dimensionless frequency parameter
which is generally a function of the boundary conditions on the plate, the ratio of the
82 Modeling and Control of Vibration in Mechanical Systems
inner to out er diameter, and Poi sson’s ratio. Denoting Ω as the rotational speed of
the disk, the frequency of the disk vibrati on mod e i s given by [23]
f = f
mn
±nΩ. (4.11)
Assuming that the change of ν is also negligible, and considering that
˜
t = 2t,
˜
f
mn
= 2
√
2
˜
λ
2
mn
2πR
2
Et
3
12γ(1 − ν
2
)
1/2
, (4.12 )
which implies some shifting of the disk vibration modes, as can be seen in the ex-
perimental results in Figures 4.2, 4.6 and 4.10.
In additio n to the doubled thickness, the mechanical properti es such as d and λ
mn
[22][23] are certain to change correspondingly after stacking two disks. Further
research for details on how the stacked disks change these properties would be sig-
nificant.
To summarize, t he proposed p rocess is indeed an approach to reduce th e disk
vibration on both disk surfaces for reading and writing, such as multi- disk servo
track w riters [25]. Thus such a disk vibration reduction approach can be used as an
alternative or complementary technique to the air shroud design [24] and the active
control approaches to fur ther improve positioning accuracy.
4.3 Self-adapting systems
In certain applications, system dynamic parameters vary with time. For example,
the mass of a system like a car, airplane or helicopter decreases as it consumes fuel.
Distinct flight conditions such as flight level, maneuvers, or landing produce different
types of excitatio n. When t he initial characteristics of the system no longer meet the
requirements of the system’s working conditions, the sy stem characteristics therefore
need to adapt t o th e parameter variatio ns of the excitat ion and the system itself. Two
ways are possible: one is to change the stiffness of the structure; the other is to add
moving masses so that their inertial effects counteract t he effects of the excitatio n
variation. Some self-adapting systems in use are bri efly introduced as fo llows [8].
Self-tuning suspension
Self-tuning suspension systems are equipped suitably for slow variation of the sy s-
tem characteristics. One method, for example, used in self-tuning systems involves
analyzing the system’s vibration frequency and its timewise variation. The tuning
is usually performed by an actuator. After the system status is measured, the tuning
system will modif y the feature of the system, such as stiffness, damping and position
of a mass.
The self-tuning sy stem is tuned by a designed control algorithm. Simulations
using the control algorithm are required to identify the setting parameters of the

Classical Vibration Control 83
algorithm and t o verify the reliability of the system. Subsequently, the algorithm
must be validated by experimental tests on the real structure. The car suspension
is an example of self-tuning suspensions. It is able to adapt to various operating
configurations depending on the type of driving, the dr iving conditions, or the desired
comfort. One method to achieve this is t o modify the suspension stiffness or its
damping u sing various techniques.
Self-adjusti ng absorbers
The mechanical resonator, which is basically a mass-spring system, is used to con-
trol certain v ibration sources. It is placed where the vibrations are to be reduced. The
principle is that the resonance fr equ ency of the mass-spring system as a resonator is
adjusted with the excitation f requency in operation, and as the mass vibrates, the
vibratory level is decreased.
In certain structures, the excitation frequency evolves with time gradually. These
changes take place over a long period, compared to t he excitation frequency. As a
result, it is necessary to create a system whose resonance frequency would adjust
automatically to the variations of the excitation frequency. For a 20 Hz excitation
frequency, this variation usually takes place between 1 and 3 seconds. This kin d of
system actually works as the case of self-adjusting absorbers.
Self-adapting resonator
Self-adapting resonators are capable of adjusting to changes in the excitation fre-
quency. The hu b resonator used in a helicopter is an example. It consists of a flapping
mass that v ibrates in a plane perpendicular to the rotation axis of the rotor. The mo-
bile flapping mass is supported by three flexible element s indexed at 120
◦
, and it
slides along the rotor axis. The stiffness of the three elements is designed so that
the resulting anti-resonance corresponds to the excitation frequency. The required
position of the mobile mass is determined by control algorithms through an actuator
and the mobile mass is moved by th e actuator. The z position of the mass makes the
variation of the inertia of the assembly and thus the anti-resonance frequency varies
accordingly.
4.4 Active vibration control
The self-adapti ng systems presented previously will not be sufficient in the cases
where the source characteristics vary too fast for the involved algor ithms or the re-
quired level of performance is too high. Active methods should be used to decrease
the vibrations.
A vibration control system is called active if it uses external power to p erform
its function. It is comprised of a servomechanism with an actuator, a sensor, and a
microprocessor-based system. The actuator applies a force to the mass whose vi-
bration is to be reduced. The sensor measures t he motion of t he mass in terms of
displacement, velocity, or acceleration, depending on th e application. The micropro-