Du C., Xie L. Modeling and Control of Vibration in Mechanical Systems
Подождите немного. Документ загружается.

104 Modeling and Control of Vibratio n in Mechanical Systems
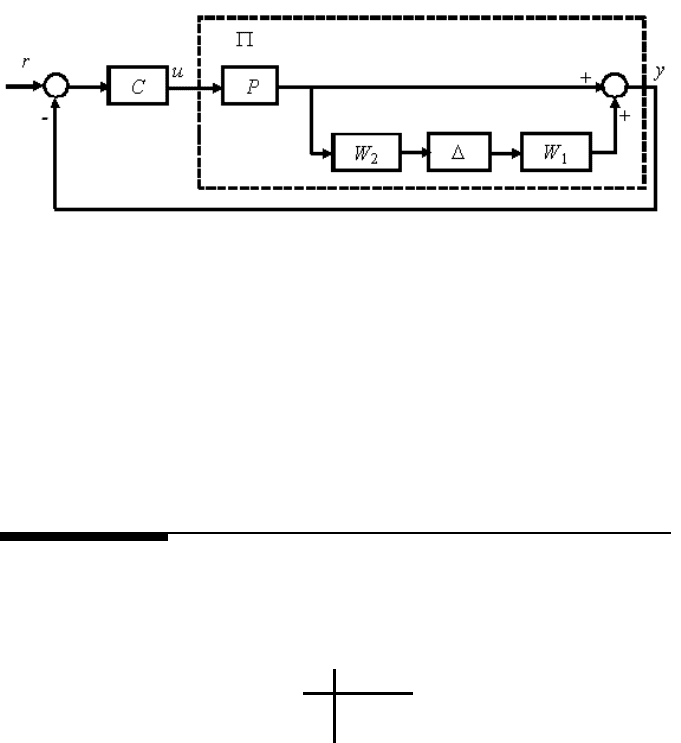
FIGURE 5.4
A closed-loop system wit h multiplicative uncertainty for robust stability analysis.
(iv) the closed-loop system is well-posed and internally stable for all stable
∆ with k∆k
∞
≤ 1 only if kW
2
T W
1
k
∞
≤ 1.
(v) In addition, assume t hat neither P nor C has poles on the imaginary
axis. Then the closed-loop system is well- posed and internally stable for all
stable ∆ with k∆k
∞
≤ 1 i f and only if kW
2
T W
1
k
∞
< 1.
5.6 Controller parametrization
Consider the standard system block diagram in Figure 5.1 with
P (s) =
A
p
B
1
B
2
C
1
D
11
D
12
C
2
D
21
D
22
. (5.104)
Suppose (A
p
, B
2
) is stabi lizable, (C
2
, A
p
) is detectable, and D
22
= 0 . The problem
discussed here is that given a plant P , parameterize all controllers C that internal ly
stabil ize P .
The parametrization for all stabilizing contro llers is k nown as Youla parametriza-
tion [68], as shown in Figure 5.5. The Youla parametrization start s with a nominal
controller that is an estimated-state feedback. The estimated state feedback controller
is given b y
u = −K ˆx, (5.105)
where t he state feedback gain K is some appropriate matrix and ˆx is an estimate of
the component of x, governed by the observer equatio n
˙
ˆx = A
p
ˆx + B
2
u + L(y − C
2
ˆx), (5.106)
Introduction to Optimal an d Robust Control 105
where L is the estimator gain. The transfer function of the estimated-state feedback
controller is thus
K
n
(s) = −K(sI −A
p
+ B
2
K + LC
2
)
−1
L. (5.107)
The nominal controller K
n
(s) will stabilize P provided K and L are chosen such
that A
p
− B
2
K and A
p
− LC
2
are stable.
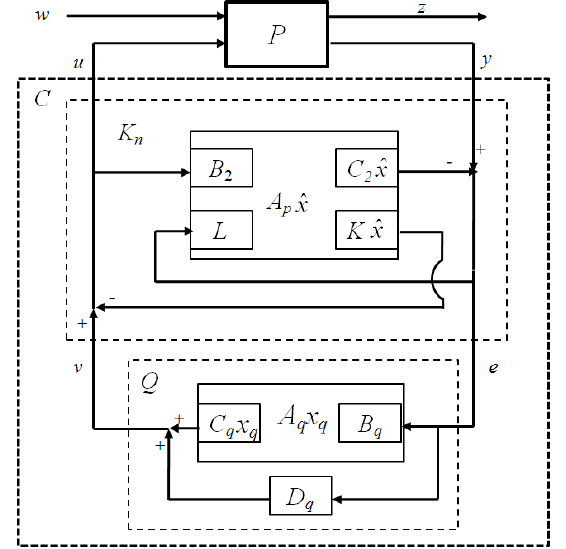
To augment t he estimated state f eedback controller, we inject v into u as shown in
Figur e 5.5, meaning that (5.105) is replaced by
u = −K ˆx + v, (5.108)
and therefore the signal v does not induce any ob server error. For the si gnal e we
take the output prediction error :
e = y − C
2
ˆx. (5.10 9)
In Figure 5.5, the observer b ased contr oller applies output prediction error processed
through a stable transfer f unction Q and added to the output of K
n
. This augmen-
tation is able to yield every controller th at stabilizes the plant, which means every
stabil izing controller can be realized as an observer based controller with some sta-
ble transfer functio n Q. Thus in the sequel we can form simple state-space equat ions
for t he parametrization of all controllers that stabilize the plant, and all closed-loop
transfer matrices achieved by contr ollers that stabilize the plant.
The state-space equations of the augmented controller are given by
˙
ˆx = (A
p
−B
2
K − LC
2
)ˆx + Ly + B
2
v, (5. 110)
u = −K ˆx + v, (5.11 1)
e = y − C
2
ˆx. (5.11 2)
If Q has a state-space realization
˙x
q
= A
q
x
q
+ B
q
e, (5.113)
v = C
q
x
q
+ D
q
e, (5.114)
then a state-space realization of t he observer based cont roller by eliminati ng e and
v from the augmented controller equations (5.110)−(5.112) and t he Q realization
(5.113)−(5 .114) is obtained as:
˙
ˆx = (A
p
−B
2
K − LC
2
− B
2
D
q
C
2
)ˆx + B
2
C
q
x
q
+ (L + B
2
D
q
)y, (5.115)
˙x
q
= −B
q
C
2
ˆx + A
q
x
q
+ B
q
y, (5.11 6)
u = −(K + D
q
C
2
)ˆx + C
q
x
q
+ D
q
y, (5.11 7)
or equivalently,
C(s) = C
c
(sI − A
c
)
−1
B
c
+ D
c
, (5 .118)
106 Modeling and Control of Vibratio n in Mechanical Systems
where
A
c
=
A
p
− B
2
K − LC
2
−B
2
D
q
C
2
B
2
C
q
−B
q
C
2
A
q
, (5.119)
B
c
=
L + B
2
D
q
B
q
, (5.12 0)
C
c
=
−K − D
q
C
2
C
q
, (5.12 1)
D
c
= D
q
. (5.12 2)
On the other hand, the state-space equations for the closed-loop system with only
the augmented controll er (5.110)−(5.112) are found as follows by eliminating u and
y from (5.110)−(5.112) and the plant equations in (5.104).
˙x = A
p
x − B
2
K ˆx + B
1
w + B
2
v, (5.12 3)
˙
ˆx = LC
2
x + (A
p
− B
2
K − LC
2
)ˆx + LD
1
w + B
2
v, (5.12 4)
z = C
1
x − D
12
K ˆx + D
11
w + D
12
v, (5.125)
e = C
2
x − C
2
ˆx + D
21
w, (5.12 6)
which are equivalently written as
T
11
(s) T
12
(s)
T
21
(s) 0
= C
T
(sI − A
T
)
−1
B
T
+ D
T
, (5.127)
where
A
T
=
A
p
−B
2
L
LC
2
A
p
−B
2
K − LC
2
, (5. 128)
B
T
=
B
1
B
2
LD
1
B
2
, (5.12 9)
C
T
=
C
1
−D
12
K
C
2
− C
2
, (5.13 0)
D
T
=
D
11
D
12
D
21
0
. (5.13 1)
It has been verified that by augmenting the stable transfer function Q, the closed-
loop transfer function from w to z is simpl y an affine function of Q and equals
T
11
+ T
12
QT
21
.
Introduction to Optimal an d Robust Control 107
FIGURE 5.5
Control system structure for Youla parametrization.
108 Modeling and Control of Vibratio n in Mechanical Systems
5.7 Performance limitation
5.7.1 Bode integral constraint
The block diagram in Figure 2.20 shows a typ ical closed-loop control sy stem. The
closed-loo p transfer function from r to y is given by
T =
P C
1 + P C
. (5.132)
The sensitivity function is also known as the disturbance rejection function or error
rejection f unction, and given by
S =
1
1 + P C
. (5.13 3)
Note that
S + T ≡ 1, (5.13 4)
hence T is also commonly called the complementary sensitivity function.
Denote T
yd
2
the transfer function from d
2
to y. In Figure 2.20 , note that
S = T
yd
2
= −T
ed
2
= T
en
. (5.13 5)
The sensitivity function is thus important, because it explains how disturbance d
2
goes through the closed-loop system and shows up at the outpu t y, or the error signal
e. It is also important to understand how noise n will be filtered throug h the closed-
loop system.
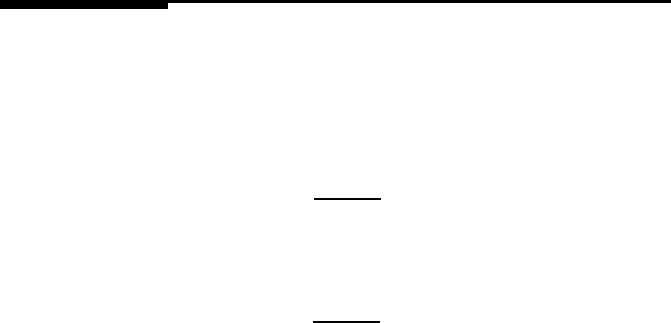
The Bode p lot of sensitivi ty functio n in continuous-time domain i s shown in Fig-
ure 5.6. It can be explained by the following Bode integral theorem.
THEOREM 5.8
[67] Bode’s Integral Theorem for Continuous-time Systems For a stable, ra-
tional P and C with P (s)C(s) having at least 2-pole roll off,
Z
∞
0
log|S|dω = 0. (5.136)
An implication of Theorem 5.8 is that if the system is made less sensitive to dis-
turbance at some frequencies, it wi ll be more sensitive at other frequencies. If the
plant P or compensator is not stable, i.e., if P (s) and /or C(s) have a finite n umber
of unstable poles p
k
, then (5.136) becomes
Z
∞
0
log|S|dω = 2π
K
X
k=1
Re(p
k
) > 0, (5.137)

Introduction to Optimal an d Robust Control 109
where K is the number o f unstable poles. Equation (5.137) implies that any unstable
poles in the system only make it worse, in that more of the d isturbance would have
to b e amplified.
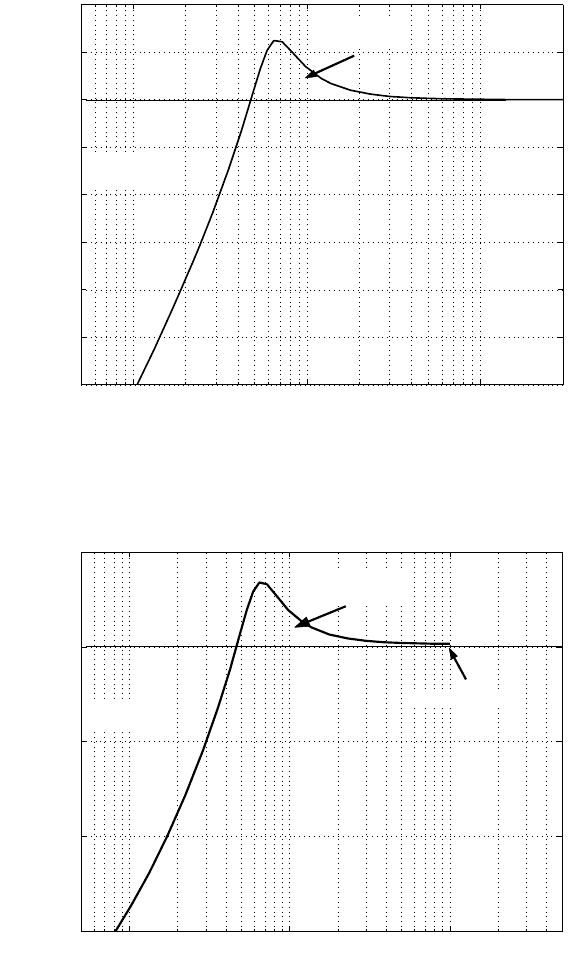
Figur e 5.7 means that for a discrete-time system, the main difference is the N yquist
frequency limits the frequency range we h ave to work with. In both cases, if we
want to attenuate disturbances at one frequency, we must amplify so me disturbance
at another frequency.
THEOREM 5.9
[108] Bode’s Integral Theorem for Discrete-ti me Systems Given a stable closed-
loop di screte-time feedback system, its sensitivity function has to satisfy the
following integral constraint:
1
π
Z
π
0
log|S(e
jφ
)|dφ =
K
X
k=1
ln|β
k
|, (5.138)
where β
k
are the open-loop unstable poles of the system, K is the total number
of unstable poles, and φ = T
s
ω with the sampling time T
s
and the frequency
ω in radians/sec.
Note that T
s
is the sampl ing period, and t he upper limit of t he frequency spectrum
is π/T
s
, the Nyquist frequency. Typical digital cont rol systems assume P C is small
and |S| ≈ 1 at or above the Nyq uist frequency, which is in general not practical for
a ph ysical system. Further research beyond Nyqu ist frequ ency is needed to address
vibrations at frequencies above the Nyquist frequency, which strives to overcome the
limitation due to the i ntegral theorem.
Theorem 5.9 implies that if for some frequency |S| < 1, then at some other fre-
quency | S| > 1. Unlike the continuous ti me result , there is n o infinite bandwidth to
spread this over. Thus all |S| > 1 happen below the Nyquist frequency, and there-
fore in a finit e frequency range. Since the theorem is limited by frequencies up to the
Nyquist frequency, if the closed-loop bandwidth is p ushed up, better p erformance at
low frequency may result in worse performance at high frequency. In a word, with
the li near feedback control whenever we improve the disturbance rejection at one
frequency we pay for it at another. Nevertheless, if we have sufficient knowledge
of system distur bance and place the disturbance amplification at places where the
disturbance is negligible, then we succeed. Otherwise, most of the disturbances may
be amplified.
110 Modeling and Control of Vibratio n in Mechanical Systems
Frequency(Hz)
0
Magnitude in dB (20log
10
|S|)
Area of vibration
rejection
Area of vibration
amplification
FIGURE 5.6
Sensitivity function for continuous-time system.
Frequency(Hz)
Nyquist frequency
Area of vibration
rejection
Area of vibration
amplification
0
Magnitude in dB (20log
10
|S|)
FIGURE 5.7
Sensitivity function for discrete-time system.

Introduction to Optimal an d Robust Control 111
5.7.2 Relationship between system gain a nd phase
In the classical feedback theory, the Bode’s gain- phase integral relation has been
used as an i mportant tool to express design constraints in feedback systems. Let
L = P C denote t he open-loop system. It is noted that ∠L(jω
0
) will be large if
the gain L attenuates slowly near ω
0
and small if it attenuates rapidly near ω
0
. The
behavio r of ∠L(jω) is particularly important near the crossover frequency ω
c
, where
|L(jω
c
)| = 1, and π + ∠L(jω
c
) is the phase margi n of the feedback system. Further
|1 + L(jω
c
)| = |1 + L
−1
(jω
c
)| = 2|sin
π + ∠L(jω
c
)
2
| (5.139)
must not be too small for good stability robustness. If π + ∠L(jω
c
) is forced to be
very small by rapid gain attenuation, the feedback system will amplify disturbances
and exhibit little uncertainty tolerance at and near ω
c
. A non-mi nimum phase zero
contributes an addit ional phase lag and imposes limi tations upon the roll off rate of
the open-loop gain. Thus the conflict between attenuation rate and loop quality near
crossover is clearly evident.
In the classical feedback control theory, it has been common to express design
goals in terms of the shape of the op en-loop transfer fu nction . A typical design
requires that the open-loop transfer function h as a h igh gain at low frequ encies and
a low gain at high frequencies while the transition should be well behaved [70].
5.7.3 Sampling
Mathematical relations and operations can be handled by digital microprocessor only
when they are expressed as a fin ite set of numbers rather than as functions having
an infinite number of possible values. Thus any measured continuous signal must
be converted to a set of pulses by sampling, which is the process used to measure a
continuous-time variable at separated instants of time. The infinite set of numbers
represented by the smooth curve is replaced by a finite set of numbers. Each pulse
amplitude is then rounded off to one of a finite number of levels depending on the
characteristics of the converter. The process is called quantization. Thus a digital
device is one in which signals are quantized in both time and amplitude. In an analog
device, signals are analog; that is, they are continuous in time and are not qu antized
in amplitude. The device that performs the sampling, quantization, and converting
to b inary form is an analog to digital (A/D) converter.
The number of binary digits or bits generated by the device is its word length,
which is an important characteristic related to t he resolution o f the converter. The
resolution measures the smallest change in the input signal that will produce a change
in the output signal. An example is that if an A /D converter has a word length of 10
bits or more, an input sig nal can be resolved to 1 in 2
10
or 1024. If the input sig nal
has a range of 10 V, the resolution is 10/10 24, or approximately 0.01 V. Thus i n
order to produce a change i n th e output the input must change by at least 0.01 V.
A discrete-time signal is ext racted by sampling from a continuous-time signal. If
the sampling frequency is not selected properly, the r esulting sampled sequence will
112 Modeling and Control of Vibratio n in Mechanical Systems
not accurately represent the origi nal continuous signal. A proper sampling frequency
is readily determined in many cases by means of the following sampling theorem.
THEOREM 5.10
Sampling Theorem A continuous-time signal y(t) can be reconstructed from
its uniforml y sampled values y(KT
s
) if the sampling period T
s
satisfies
T
s
≤
π
¯ω
(5.14 0)
where ¯ω is the highest frequency contained in the signal, that is, |Y (ω)| = 0
for ω > ¯ω.
If a system involves a sampling operation of continuous-time signals t o gener-
ate discrete-time signals, a time delay may be induced. Any time delay added in to
a closed-loop control system will decrease the stability of the system and in some
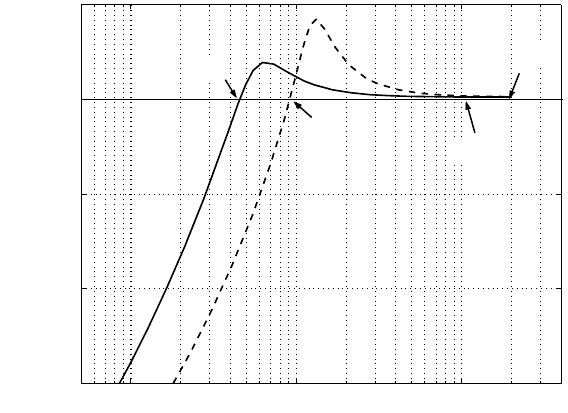
cases may even cause system instability. The Nyquist rate shown in Figure 5.7 signi-
fies that the freedom to spread the amplification area around is limited by the Nyquist
frequency, which is half of the sampling rate. Fig ure 5.7 implies that a certain rejec-
tion amount | S| < 1 must be accompanied by a certain area of |S| > 1, which has
to o ccur before th e Nyquist frequency. With a higher sampling rate and closed-loop
system bandwidth being kept constant, the amplification |S| > 1 will essent ially
spread over a broader frequency band and the height of amplification hump shrinks,
as shown in Figure 5.8. If we push the closed-loop system bandwidth from f
1
to f
2
,
as seen in Figure 5.8, better performance in low frequency range may result in worse
performance in high frequency range.
5.8 Conclusion
Before presentating a series of advanced vibration control methodologies, this chap-
ter has been used to recall some standard advanced control techniques, which hel ps
understand problems to be addressed in the later chapters and possible solutions. It
has reviewed H
2
and H
∞
performances, H
2
and H
∞
controls, robust control , con-
troller parametrization, as well as performance limit at ion of linear feedback control
systems.
Introduction to Optimal an d Robust Control 113
Frequency(Hz)
f
N1
0
Magnitude in dB (20log
10
|S|)
2f
N1
f
2
f
1
FIGURE 5.8
Sensitivity function in discrete-ti me domain.