Цыпкин Я.З Основы теории автоматических систем
Подождите немного. Документ загружается.

4й
ФУНКЦИОНАЛЬНАЯ СХЕМА И
ТИПЫ
СИСТЕМ [ГЛ 3
с заданным значением, поступающим из задатчика 2. Закон
управления формируется цифровым фильтром
4,
вход
и
выход
которого коммутируются ключами 7, 8. Цифровой фильтр 4 вы-
выполнен
как блок управляющей
ЦВМ,
что позволяет осущест-
вить такой закон управления, который обеспечивает высокое
качество стабилизации. Сигнал с выхода цифрового фильтра
поступает на исполнительное устройство 5, которое управляет
двигателями ориентации 6. Момент, создаваемый при работе
двигателей, компенсирует отклонение
угла
ф
от заданного зна-
чения.
Ёыше речь шла об автоматических системах управления од-
ной
величиной. В ряде случаев возникает необходимость управ-
ления
несколькими величинами. Так, например, в паровом котле
необходимо поддерживать постоянство уровня воды, давления
пара и температуры перегрева пара. Для самолета, кроме управ-
ления
курсом, необходимо управлять креном и тангажем и т. д.
В этих случаях один объект снабжается несколькими управляю-
щими
устройствами, которые
могут
быть связаны
между
собой.
Функциональная
схема автоматической системы управления не-
сколькими
величинами более сложна. В ней присутствуют не-
сколько
управляющих устройств, выполняющих одни и те же
функции.
Глава
4
ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
§
4.1. Виды воздействий
Всякое воздействие на автоматическую систему вызывает
изменение
управляемой величины. Это изменение управляемой
величины вызывает отклонение ее от заданного значения и по-
рождает поэтому некий процесс управления. Характер процесса
управления зависит как от самой автоматической системы (ее
'структуры, параметров), так и от места приложения и вида
внешних воздействий.
Внешние воздействия можно разделить на два
класса
—
задающие
воздействия и
возмущающие
воздействия.
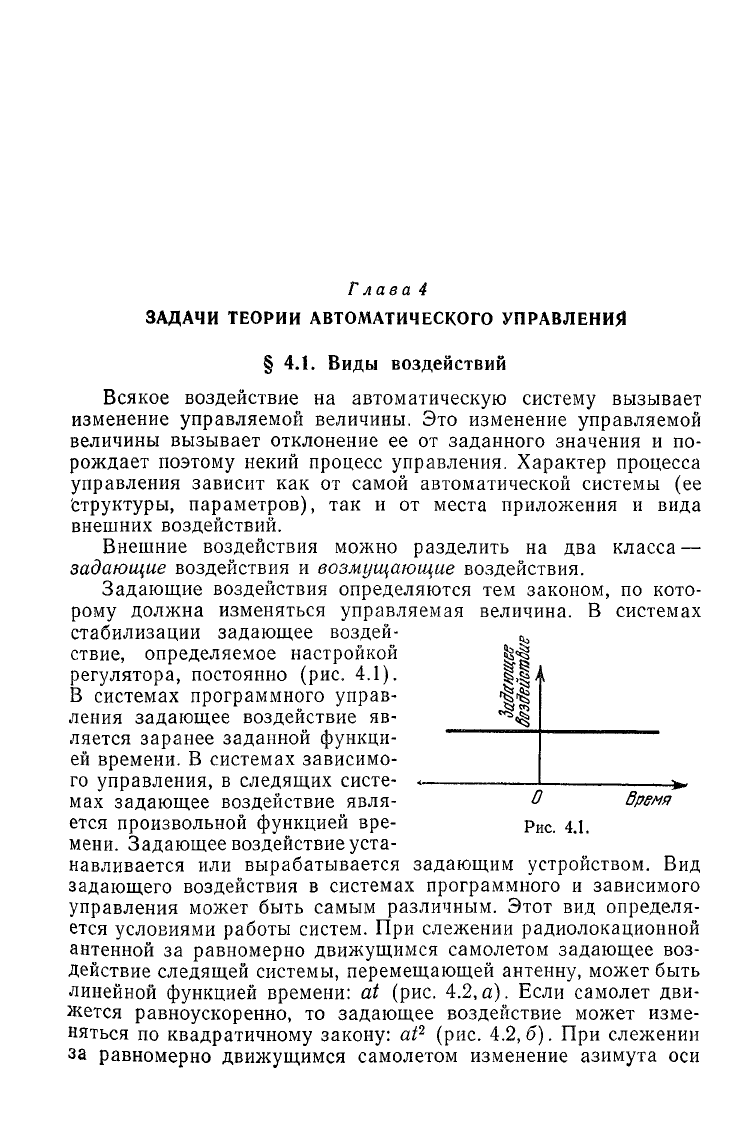
Задающие воздействия определяются тем законом, по кото-
рому должна изменяться управляемая величина, В системах
стабилизации задающее
воздей-
^
ствие, определяемое настройкой
8|
регулятора, постоянно (рис. 4.1).
В системах программного управ-
ления
задающее воздействие
яв-
ляется заранее заданной функци-
ей
времени. В системах зависимо-
го управления, в следящих систе-
й
ур, дщ _
мах
задающее
воздействие
явля-
О
Время
ется произвольной функцией вре-
р
иа
4.1.
мени.
Задающее воздействие
уста-
навливается или вырабатывается задающим устройством. Вид
задающего воздействия в системах программного и зависимого
управления может быть самым различным. Этот вид определя-
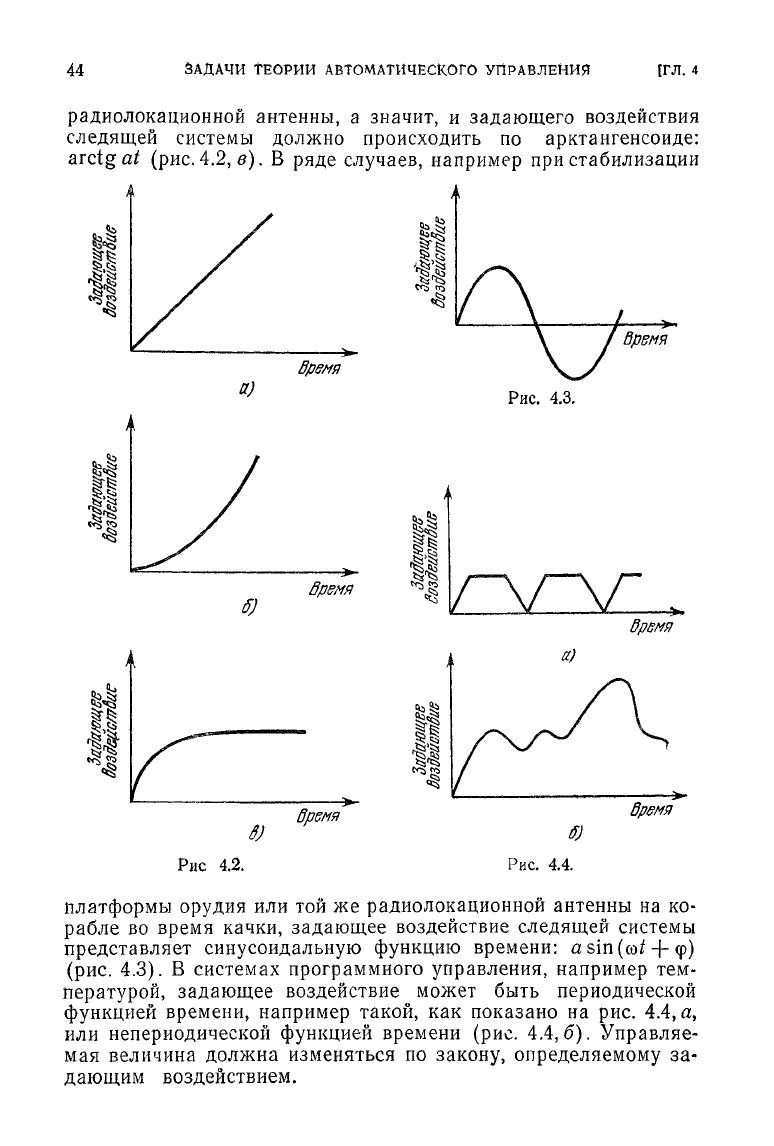
ется условиями работы систем. При слежении радиолокационной
антенной
за равномерно движущимся самолетом задающее воз-
действие следящей системы, перемещающей антенну, может быть
линейной
функцией времени: at (рис.
4.2,а).
Если самолет дви-
жется равноускоренно, то задающее воздействие может изме-
няться
по квадратичному закону: at
2
(рис.
4.2,6).
При слежении
за равномерно движущимся самолетом изменение азимута оси
44
ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
[ГЛ. 4
радиолокационной
антенны, а значит, и задающего воздействия
следящей системы должно происходить по арктангенсоиде:
t^
(рис.4.2,
в). В ряде случаев, например при стабилизации
<*5
1
ч
II
я
is
Время
5)
Время
6)
Время
Рис 4.2.
Рис.
4.3,
Ч
Время
и
а)
Время
б)
Рис. 4.4.
платформы
орудия или той же радиолокационной антенны на ко-
рабле во время качки, задающее воздействие следящей системы
представляет синусоидальную функцию времени: a
sin((o£-|-ф)
(рис.
4.3). В системах программного управления, например
тем-
пературой, задающее воздействие может быть периодической
функцией
времени, например такой, как показано на рис. 4.4, а,
или
непериодической функцией времени (рис.
4.4,6),
Управляе-
мая
величина должна изменяться по закону, определяемому за-
дающим воздействием.
§
4 1]
ВИДЫ
ВОЗДЕЙСТВИЙ
45
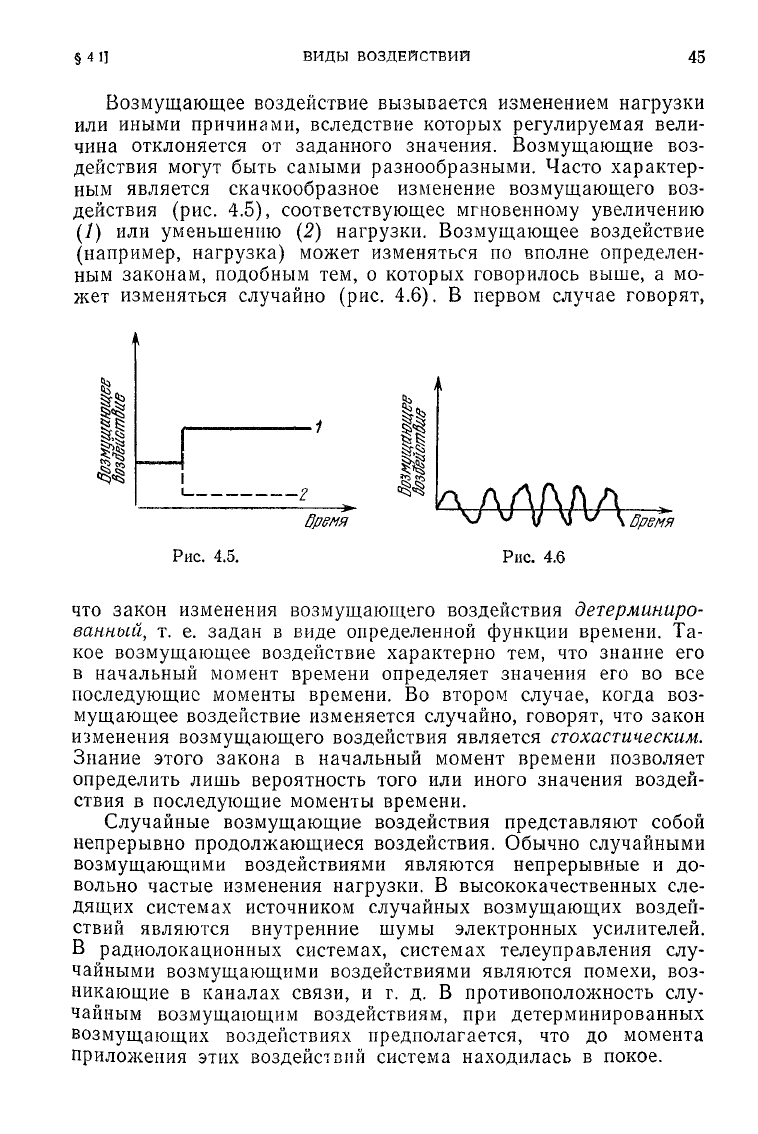
Возмущающее воздействие вызывается изменением нагрузки
или
иными причинами, вследствие которых регулируемая вели-
чина
отклоняется от заданного значения. Возмущающие воз-
действия
могут
быть самыми разнообразными. Часто характер-
ным
является скачкообразное изменение возмущающего воз-
действия (рис.
4.5),
соответствующее мгновенному увеличению
(1)
или уменьшению (2) нагрузки. Возмущающее воздействие
(например,
нагрузка) может изменяться по вполне определен-
ным
законам, подобным тем, о которых говорилось выше, а мо-
жет изменяться случайно (рис. 4.6). В первом
случае
говорят,
I
и
I
в
др&мя
ЧЛЛЛЛЛ
Время
Рис. 4.5.
Рис. 4.6
что закон изменения возмущающего воздействия
детерминиро-
ванный,
т. е. задан в виде определенной функции времени. Та-
кое
возмущающее воздействие характерно тем, что знание его
в
начальный момент времени определяет значения его во все
последующие
моменты времени. Во втором случае, когда воз-
мущающее воздействие изменяется случайно, говорят, что закон
изменения
возмущающего воздействия является
стохастическим.
Знание
этого закона в начальный момент времени позволяет
определить лишь вероятность того или иного значения воздей-
ствия в последующие моменты времени.
Случайные возмущающие воздействия представляют собой
непрерывно
продолжающиеся воздействия. Обычно случайными
возмущающими воздействиями являются непрерывные и до-
вольно частые изменения нагрузки. В высококачественных сле-
дящих системах источником случайных возмущающих воздей-
ствий являются внутренние шумы электронных усилителей.
В радиолокационных системах, системах телеуправления слу-
чайными
возмущающими воздействиями являются помехи, воз-
никающие
в каналах связи, и г. д. В противоположность слу-
чайным
возмущающим воздействиям, при детерминированных
возмущающих воздействиях предполагается, что до момента
приложения
этих воздействий система находилась в покое.

46 ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ [ГЛ. 4
Для систем стабилизации основным является возмущающее
воздействие (изменение нагрузки). Для следящих систем обычно
преобладающим является задающее воздействие (изменение
задания
или настройки). В программных системах часто важно
наряду с задающим воздействием учитывать и возмущающее
воздействие.
Задачей автоматического управления является устранение
или
уменьшение до необходимых пределов отклонения управ-
ляемой
величины от заданного значения, вызванного возмущаю-
щим
воздействием, Принципиально невозможно сделать управ-
ляемую величину независимой от
всех
возмущающих воздей-
ствий,
ибо по самому принципу работы автоматической системы
управляющее устройство может прийти в действие лишь
тогда,
когда появится отклонение регулируемой величины от заданного
значения.
Даже при отсутствии возмущающих воздействий ре-
гулируемая величина не может во все моменты времени точно
изменяться
в соответствии с переменным задающим воздейст-
вием.
Это связано с тем, что в любой системе невозможно вне-
запное
изменение энергии, накопленной в элементах системы.
Всякое изменение состояния системы
будет
вызывать перерас-
пределение этой энергии и в связи с этим изменение управляе-
мой
величины.
§
4.2.
Характер
процессов
управления
Изменение
состояния автоматической системы, вызванное
возмущающим воздействием, приводит к отклонению управляе-
мой
величины от ее предшествующего значения, как это было
выяснено
ранее в примерах. Это отклонение может с течением
времени возрастать, что
соответствует
неустойчивости системы.
Очевидно, неустойчивая система, как правило, не сможет вы-
полнить
возложенных на нее функций. По своей природе авто-
матические системы, представляющие собой системы с обратной
связью, склонны к неустойчивости. Поэтому одним из важней-
ших требований, предъявляемых к автоматической системе, яв-
ляется требование устойчивости. В устойчивой системе отклоне-
ние
регулируемой величины с течением времени не должно
возрастать. Устойчивость системы, как мы уже выяснили, может
быть обеспечена соответствующим выбором значений парамет-
ров системы или изменением ее структуры путем введения до-
полнительных стабилизирующих элементов.
Однако устойчивость автоматической системы является лишь
необходимым, но далеко не достаточным условием ее нормальной
работы. Во всякой устойчивой системе отклонение управляемой
величины не может быть равным нулю во все моменты времени
при
наличии возмущений. Чем меньше это отклонение (с той
,4.2]
ХАРАКТЕР
ПРОЦЕССОВ
УПРАВЛЕНИЯ
47
или
иной точки зрения), тем точнее и, вообще говоря, лучше
система выполняет свое назначение.
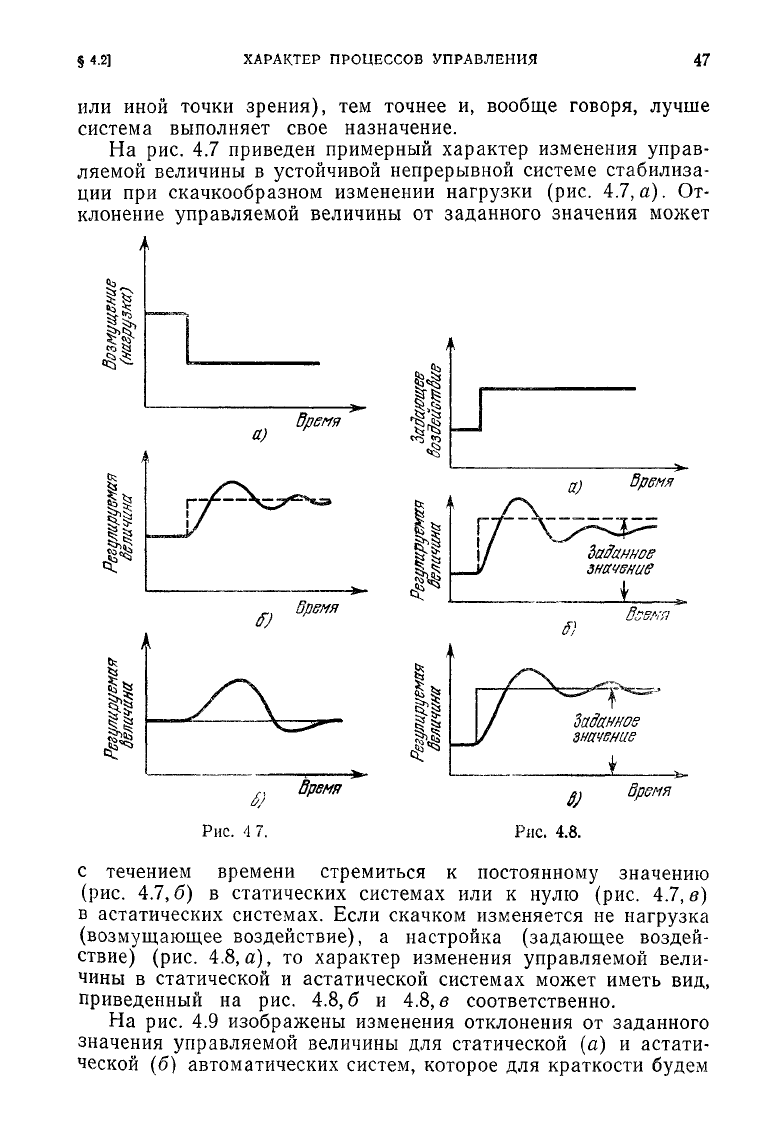
На
рис. 4.7 приведен примерный характер изменения управ-
ляемой
величины в устойчивой непрерывной системе стабилиза-
ции
при скачкообразном изменении нагрузки (рис. 4.7, а). От-
клонение
управляемой величины от заданного значения может
II
I
I
ll
а)
Время
Время
6)
Рис,
4
7.
др&мя
И
л
а)
Время
ВйВКЯ
ft
Врбмя
Рис. 4,8.
с течением времени стремиться к постоянному значению
(рис.
4.7,6)
в статических системах или к нулю (рис. 4.7,
в)
в
астатических системах. Если скачком изменяется не нагрузка
(возмущающее воздействие), а настройка (задающее воздей-
ствие) (рис. 4.8, а), то характер изменения управляемой вели-
чины
в статической и астатической системах может иметь вид,
приведенный
на рис.
4.8,6
и 4.8,
в
соответственно.
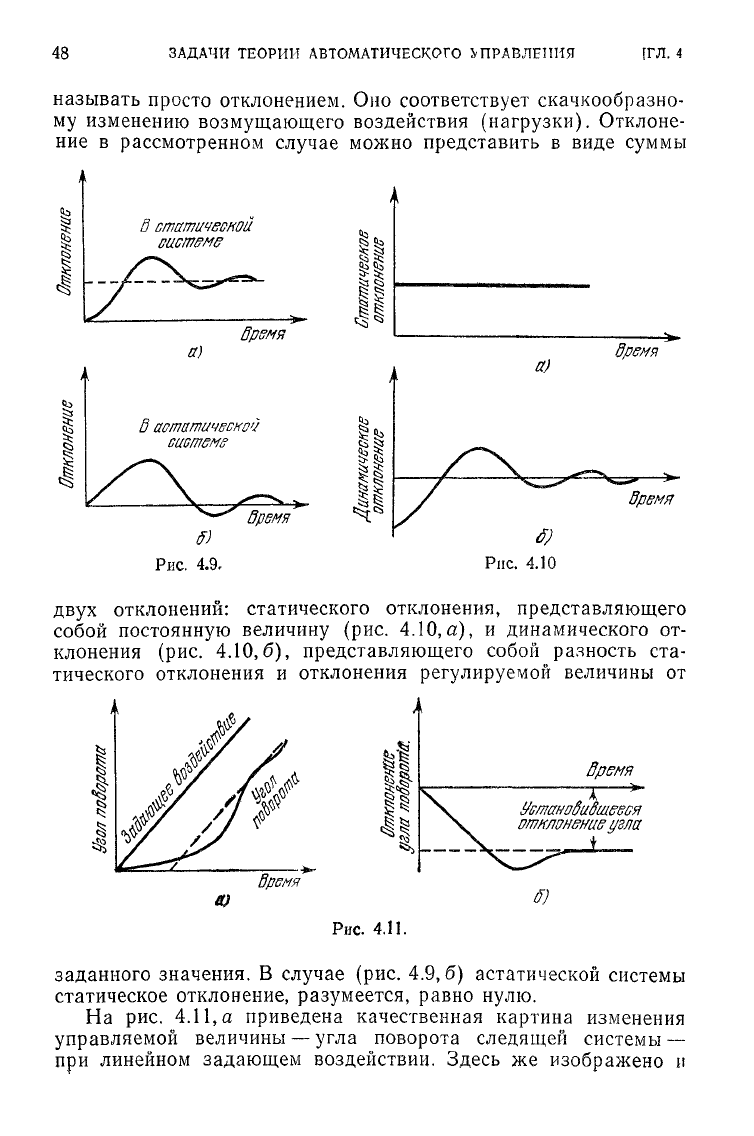
На
рис. 4.9 изображены изменения отклонения от заданного
значения
управляемой величины для статической (а) и астати-
ческой (б) автоматических систем, которое для краткости
будем
48
ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
[ГЛ.
4
называть просто отклонением. Оно соответствует скачкообразно-
му изменению возмущающего воздействия (нагрузки). Отклоне-
ние
в рассмотренном
случае
можно представить в виде суммы
В
статической
а)
Время
В
астатической
системе
Ю
Рис.
4.9,
Время
Si
I
4»
Время
Время
Рис.
4.10
двух
отклонений: статического отклонения, представляющего
собой постоянную величину (рис. 4.10, а), и динамического от-
клонения
(рис.
4.10,6),
представляющего собой разность ста-
тического отклонения и отклонения регулируемой величины от
8з!
И
дрвмя
Время
Х
Установившееся
отклонение
угла
Ю
S)
Рис.
4.11.
заданного значения. В
случае
(рис.
4.9,6)
астатической системы
статическое отклонение, разумеется, равно нулю.
На
рис.
4.11,
а
приведена качественная картина изменения
управляемой
величины
—
угла
поворота следящей системы —
при
линейном задающем воздействии. Здесь же изображено \\
§4.2]
ХАРАКТЕР
ПРОЦЕССОВ УПРАВЛЕНИЯ
49
отклонение
(рис.
4.11,6),
т. е. разность
между
изменениями
задающего воздействия и управляемой величины. Как и ранее,
отклонение
управляемой величины можно представить в виде
двух
отклонений — установившегося, или вынужденного откло-
нения
и динамического отклонения. При установившемся откло-
нении
скорости изменения задающего воздействия и регулируемой
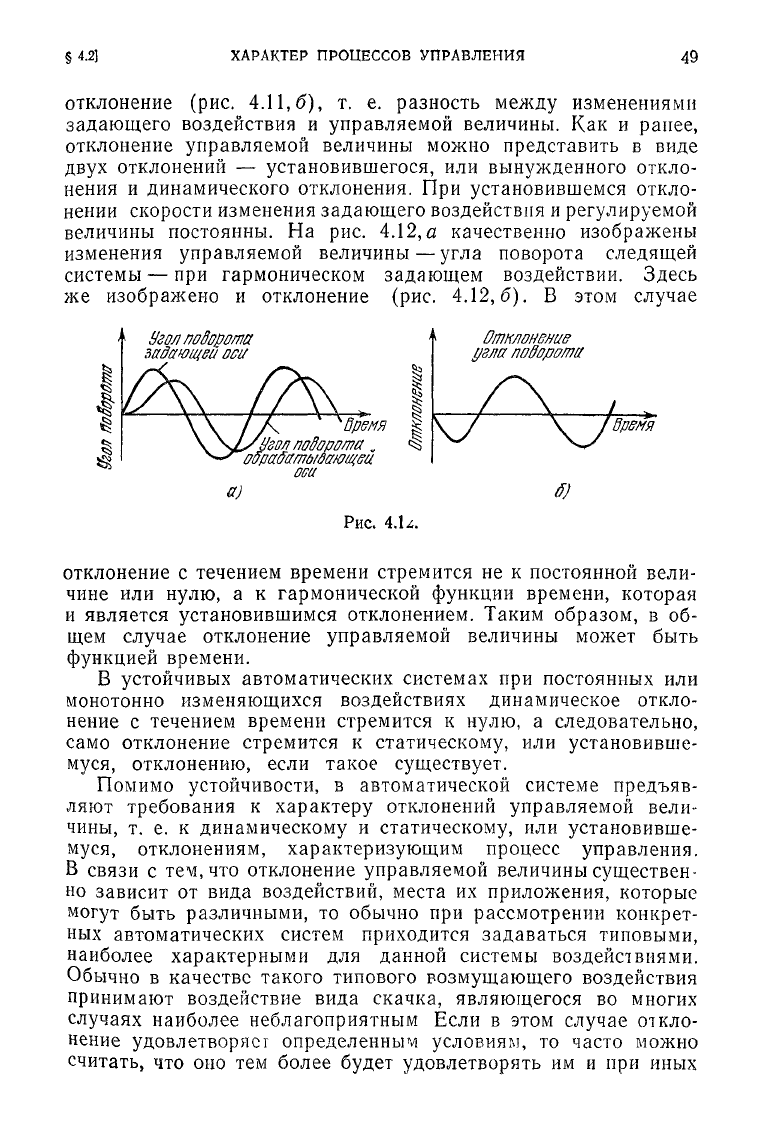
величины постоянны. На рис.
4.12,
а качественно изображены
изменения
управляемой
величины—угла
поворота следящей
системы
— при гармоническом задающем воздействии. Здесь
же изображено и отклонение (рис.
4.12,6).
В этом
случае
I
I
I
^Время
I
'кол
nodopomct
„
^
обра&вть/дающеи
ODU
Отклонение
узла
подорота
\У
a)
Рис.
4.U.
отклонение
с течением времени стремится не к постоянной вели-
чине
или нулю, а к гармонической функции времени, которая
и
является установившимся отклонением. Таким образом, в об-
щем
случае
отклонение управляемой величины может быть
функцией
времени.
В устойчивых автоматических системах при постоянных или
монотонно
изменяющихся воздействиях динамическое откло-
нение
с течением времени стремится к нулю, а следовательно,
само отклонение стремится к статическому, или установивше-
муся, отклонению, если такое
существует.
Помимо
устойчивости, в автоматической системе предъяв-
ляют требования к характеру отклонений управляемой
вели-
чины,
т. е. к динамическому и статическому, или установивше-
муся, отклонениям, характеризующим процесс управления.
В связи с тем, что отклонение управляемой величины существен-
но
зависит от вида воздействий, места их приложения, которые
могут
быть различными, то обычно при рассмотрении конкрет-
ных автоматических систем приходится задаваться типовыми,
наиболее характерными для данной системы воздействиями,
Обычно в качестве такого типового возмущающего воздействия
принимают воздействие вида скачка, являющегося во многих
случаях наиболее неблагоприятным Если в этом
случае
откло-
нение
удовлетворяет определенным условиям, то часто можно
считать, что оно тем более
будет
удовлетворять им и при иных
50 ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ [ГЛ 4
характерных воздействиях. Для следящих систем в качестве
задающего воздействия принимают воздействие, изменяющееся
по
линейному закону (рис.
4.11,
а).
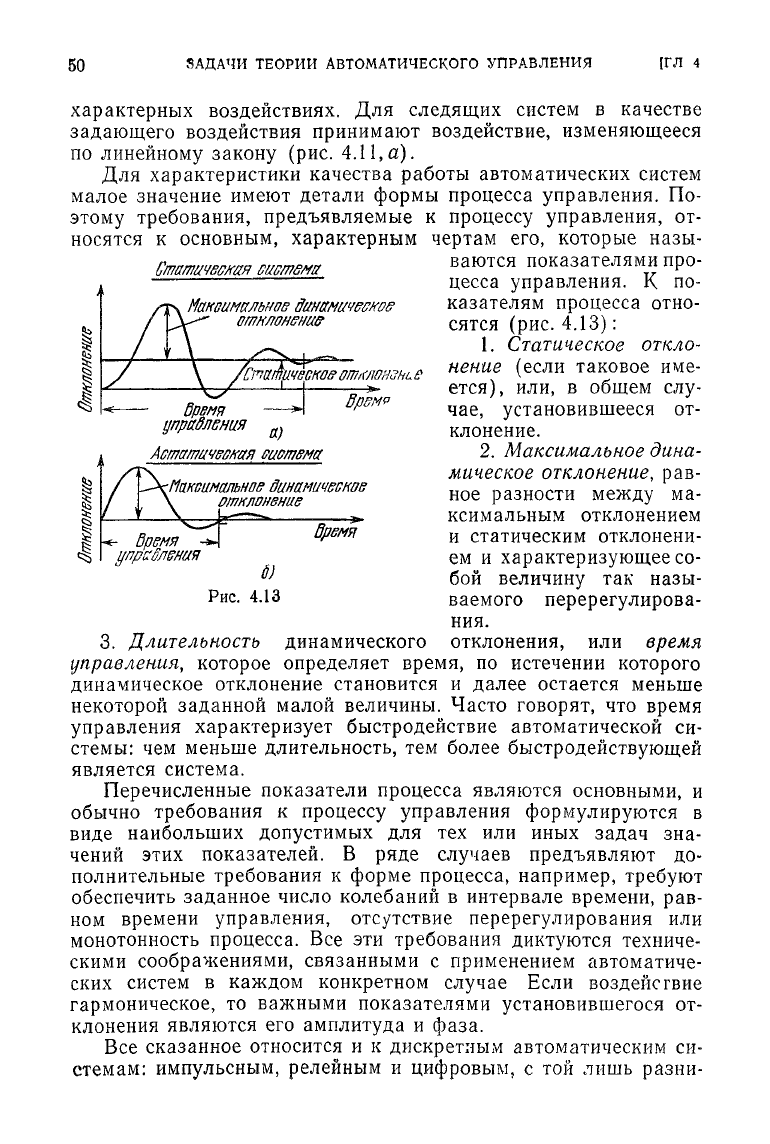
Для характеристики качества работы автоматических систем
малое значение имеют детали формы процесса управления. По-
этому требования, предъявляемые к процессу управления, от-
носятся
к основным, характерным чертам его, которые назы-
Статическия
система
ваются
показателями про-
цесса управления. К по-
Максимальное
динамическое
казателям процесса отно-
отклояение
сятся (рис.
4.13):
1.
Статическое
откло-
нение
(если таковое име-
ется),
или, в общем слу-
Время
—>\
ufjon^
чае
^ установившееся от-
упрадления
а)
клонение.
Астатическая
система
2.
Максимальное
дина-
/
/ 1 \
Максимальное
динамическое
\
мическое
отклонение,
рав-
отклонение
ное
Разности
между
ма~
^jTВремя
ксимальным
отклонением
ь-
Время
-И
И и
статическим отклонени-
упрсблшя
ем и
характеризующее
со-
й)
бой
величину
так
назы-
р
ис
4.13
ваемого перерегулирова-
ния.
3.
Длительность
динамического отклонения,
или
время
управления,
которое определяет время,
по
истечении которого
динамическое отклонение становится
и
далее
остается меньше
некоторой заданной малой величины. Часто говорят,
что
время
управления характеризует быстродействие автоматической
си-
стемы:
чем
меньше длительность,
тем
более быстродействующей
является система.
Перечисленные показатели процесса являются основными,
и
обычно требования
к
процессу управления формулируются
в
виде наибольших допустимых
для тех или
иных задач
зна-
чений
этих показателей.
В
ряде случаев предъявляют
до-
полнительные требования
к
форме процесса, например,
требуют
обеспечить заданное число колебаний
в
интервале времени,
рав-
ном
времени управления, отсутствие перерегулирования
или
монотонность процесса.
Все эти
требования диктуются техниче-
скими
соображениями, связанными
с
применением автоматиче-
ских систем
в
каждом конкретном
случае
Если воздействие
гармоническое,
то
важными показателями установившегося
от-
клонения
являются
его
амплитуда
и
фаза.
Все сказанное относится
и к
дискретным автоматическим
си-
стемам: импульсным, релейным
и
цифровым,
с той
лишь разни-
§4 3] ЗАДАЧИ
ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 51
цей,
что в этом
случае
процессы регулирования
могут
иметь и
не
столь плавный характер.
Наличие
зазоров,
сухого
трения в механических элементах
систем,
ограниченная мощность источников энергии управляю-
щего устройства приводят к
тому,
что линейная зависимость ме-
жду входными и выходными величинами нарушается и системы
становятся нелинейными. В нелинейных автоматических систе-
мах мы сталкиваемся с рядом новых явлений, не присущих рас-
смотренным выше линейным системам. В частности, в этих
системах
могут
возникать
автоколебания,
т. е. колебания неиз-
менной
амплитуды и частоты, зависящие от параметров системы.
Автоколебания поддерживаются не внешними периодическими
силами,
а внутренними силами системы. Требования, предъяв-
ляемые к нелинейным автоматическим системам, помимо
неко-
торых из отмеченных выше, сводятся к устранению этих автоко-
лебаний или уменьшению их
«амплитуды»
до допустимой
величины,
увеличению частоты. В ряде случаев, наоборот, эти
автоколебания используются для уменьшения трения, люфтов
и
т. п. в автоматических системах.
Кроме
этих требований, относящихся к динамике, к автома-
тическим системам предъявляются требования технологического
и
конструктивного характера, относящиеся, например, к мощно-
стям элементов и их физической природе, эксплуатационным ха-
рактеристикам. Эти вопросы, очень важные при проектировании
систем, относятся к специальным курсам и здесь не рассматри-
ваются.
§
4.3. Задачи теории автоматического управления
Теория
автоматического управления изучает общие
прин-
ципы
построения автоматических систем, методы их исследова-
ния
независимо от физической природы процессов, протекающих
в
этих системах. Теория автоматического управления является
теоретической базой создания автоматических систем в различ-
ных отраслях техники, экономики и изучения систем в живой
природе и обществе.
Основными
задачами
теории
автоматического
управления
являются
исследования
статических
(или в
общем
случае
установившихся)
и
динамических
свойств
автоматических
систем
и
разработка
систем,
удовлетворяющих
заданным
техническим
требованиям.
Исследование процесса работы некоторой автоматической си-
стемы, заданной своей структурой и элементами, при различных
параметрах этих элементов и различных воздействиях состав-
ляет
задачу
анализа.
В
задачу
анализа, таким образом,
входит