Цыпкин Я.З Основы теории автоматических систем
Подождите немного. Документ загружается.

Глава
8
ХАРАКТЕРИСТИКИ
АВТОМАТИЧЕСКИХ
СИСТЕМ
§
8.1.
Законы
управления
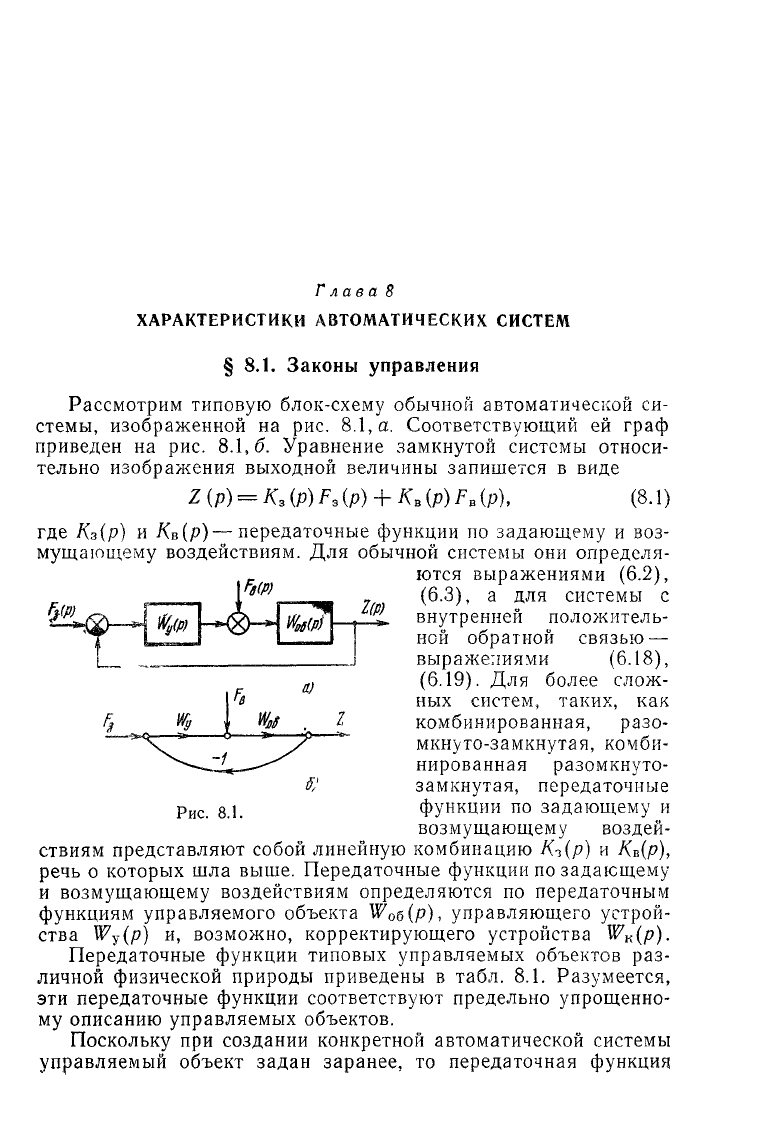
Рассмотрим типовую блок-схему обычной автоматической си-
стемы, изображенной на рис.
8.1,
а. Соответствующий ей граф
приведен на рис.
8.1,6.
Уравнение замкнутой системы относи-
тельно изображения выходной величины запишется в виде
Z(
P
)
=
K
3
(P)F
3
(P)
+
K
B
(P)FB(P),
(8.1)
где
Кз(р)
и
Кв(р)—передаточные
функции по задающему и воз-
мущающему воздействиям. Для обычной системы они определя-
ются выражениями (6.2),
(6.3), а для системы с
внутренней положитель-
ной
обратной
связью—
выражениями
(6.18),
(6.19). Для более слож-
ных систем, таких, как
комбинированная,
разо-
мкнуто-замкнутая, комби-
нированная
разомкнуто-
замкнутая, передаточные
р
ис
з.1.
функции по задающему и
возмущающему воздей-
ствиям представляют собой линейную комбинацию
К?(р)
и
Кв(р),
речь о которых шла выше. Передаточные функции по задающему
и возмущающему воздействиям определяются по передаточным
функциям
управляемого объекта
W
0
6(p)
1
управляющего устрой-
ства
W
y
(p)
и, возможно, корректирующего устройства
W
K
(p).
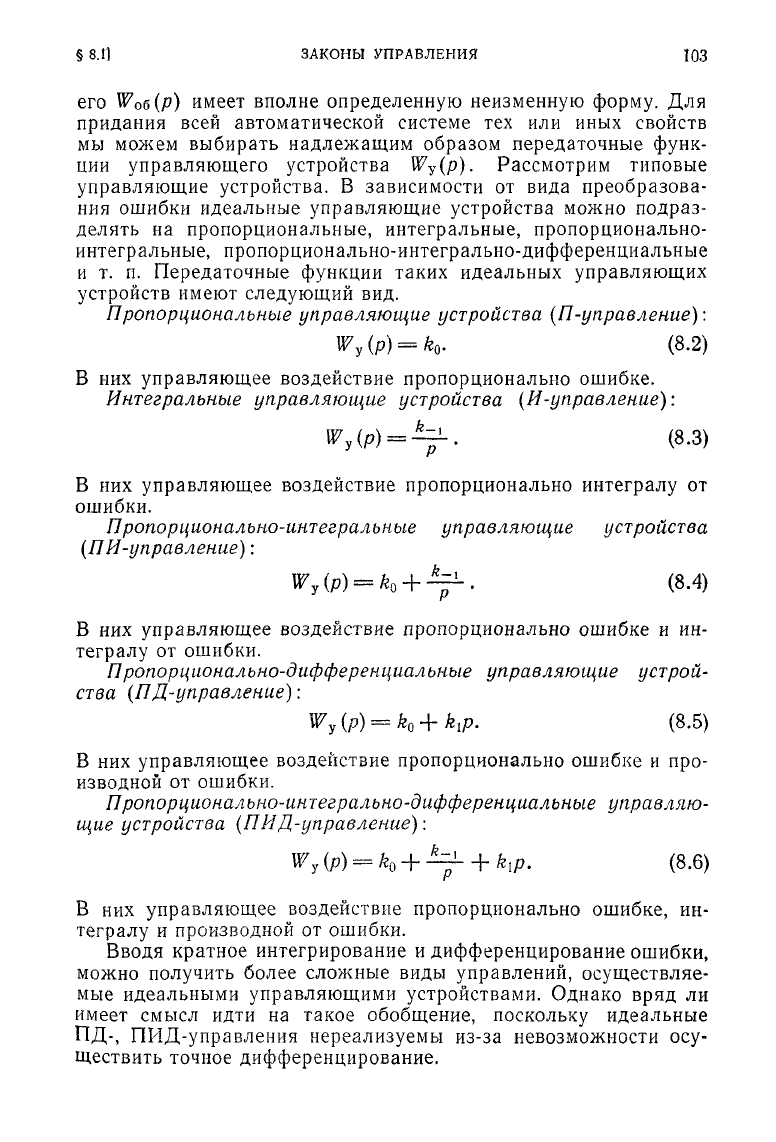
Передаточные функции типовых управляемых объектов раз-
личной
физической природы приведены в табл. 8.1. Разумеется,
эти
передаточные функции
соответствуют
предельно упрощенно-
му описанию управляемых объектов.
Поскольку
при создании конкретной автоматической системы
управляемый объект задан заранее, то передаточная функция
§
8.1] ЗАКОНЫ УПРАВЛЕНИЯ ЮЗ
его
W
0
6(p)
имеет вполне определенную неизменную форму. Для
придания
всей автоматической системе тех или иных свойств
мы можем выбирать надлежащим образом передаточные функ-
ции
управляющего устройства
W
y
(p).
Рассмотрим типовые
управляющие устройства. В зависимости от вида преобразова-
ния
ошибки идеальные управляющие устройства можно подраз-
делять на пропорциональные, интегральные, пропорционально-
интегральные, пропорционально-интегрально-дифференциальные
и
т. п. Передаточные функции таких идеальных управляющих
устройств имеют следующий вид.
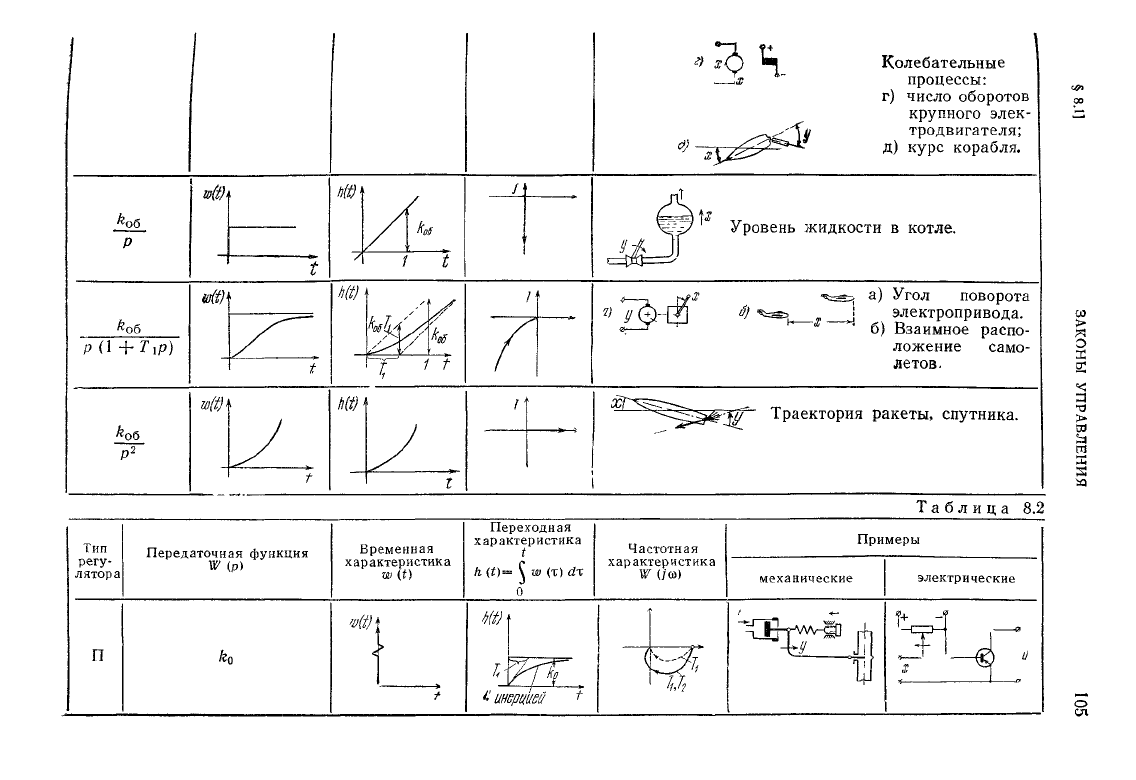
Пропорциональные
управляющие
устройства
(П-управление):
W
y
(p)
=
k
0
.
(8.2)
В них управляющее воздействие пропорционально ошибке.
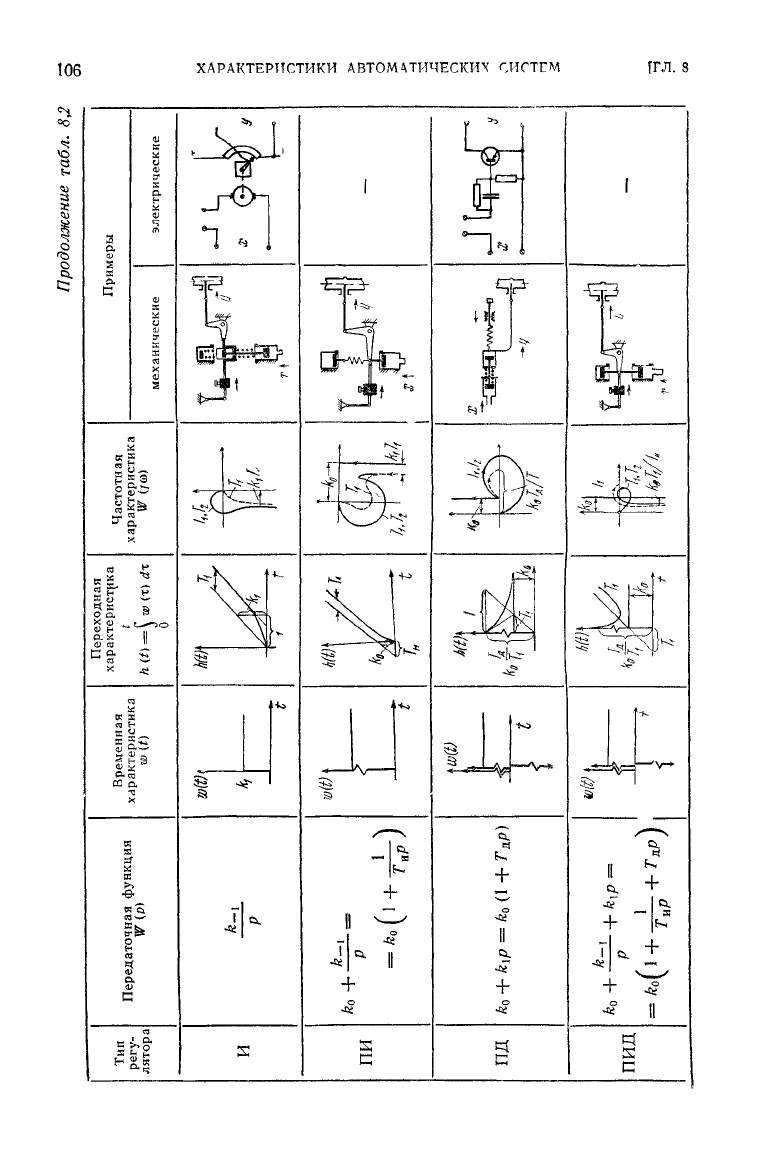
Интегральные
управляющие
устройства
(И-управление):
«МР)
=
~ •
(8-3)
В них управляющее воздействие пропорционально интегралу от
ошибки.
Пропорционально-интегральные
управляющие
устройства
(ПИ-управление):
W
y
{p)
=
k
u
+
^f-.
(8.4)
В них управляющее воздействие пропорционально ошибке и ин-
тегралу
от ошибки.
Пропорционально-дифференциальные
управляющие
устрой-
ства
(ПД-управление):
W
y
(p)
=
k
Q
+
k
lP
.
(8.5)
В них управляющее воздействие пропорционально ошибке и про-
изводной
от ошибки.
Пропорционально-интегрально-дифференциальные
управляю-
щие
устройства
(П
И
Д-управление):
W
y
{p)
=
k
0
+
£=j-
+
k
lP
.
(8.6)
В них управляющее воздействие пропорционально ошибке, ин-
тегралу
и производной от ошибки.
Вводя кратное интегрирование и дифференцирование ошибки,
можно получить более сложные виды управлений, осуществляе-
мые идеальными управляющими устройствами. Однако вряд ли
имеет смысл идти на такое обобщение, поскольку идеальные
ПД-,
ПИД-управления нереализуемы из-за невозможности осу-
ществить точное дифференцирование.

Таблица
8.1
Передаточная
функция
W
(р)
Временная
характеристика
w(t)
Переходная
характеристика
t
h
(*)-
jj
w
(T)
d%
Частотная
характеристика
W
(/со)
Примеры
а) Ток и напря-
жение в элек-
трической
цепи.
б) Давление и
поток
жидко-
сти в трубо-
проводе
a(t)\
а) Давление и по-
ток
в газопро-
воде.
б) Число оборо-
тов двигателя.
в) Уровень жид-
кости в резер-
вуаре
\+T
iP
+T
2
2
p
2
[\
Апериодические
процессы:
а) температура
печи;
б) напряжение
генератора;
в) число оборотов
электродвигате-
ля.
Колебательные
процессы:
г) число оборотов
крупного элек-
тродвигателя;
д) курс корабля.
/ t
Уровень жидкости в котле.
/Ml
+7»
*)
у
а)
Угол
поворота
электропривода.
б) Взаимное распо-
ложение само-
летов.
w(t)\
Траектория ракеты, спутника.
Таблица
8.2
Тип
регу-
лятора
п
Передаточная функция
W
(р)
Временная
хар актеристика
w(t)
<
/
Переходная
характеристика
t
h{t)=
{
w
(x)
d%
0
U
инерцией
+
Частотная
характеристика
W
(/©)
'и,''
Примеры
механические
4frp*a
jfj
электрические
106
ХАРАКТЕРИСТИКИ АВТОМАТИЧЕСКИХ СИСТЕМ
[ГЛ. 8
§8 2] ПОКАЗАТЕЛИ ПЕРЕДАТОЧНЫХ
ФУНКЦИЙ
Ю7
Передаточная функция реального управляющего устройства,
из
которой
в
качестве частных случаев вытекают рассмотренные
выше передаточные функции идеальных управляющих устройств,
имеет вид
.
„
.
„,
\
,
.,
я
,
•
(8-7)
Второй множитель
в (8.7)
характеризует инерционность неиде-
ального управляющего устройства. Передаточные функции
и
другие
характеристики типовых управляющих устройств,
а так-
же
их
примеры приведены
в
табл.
8.2.
§
8.2.
Показатели передаточных функций
Передаточные функции замкнутых систем определяются
по
передаточным функциям прямых частей
W
3
(p)
или
W
B
(p)
и по
передаточной функции разомкнутой системы
W(p)
=
W
Y
(p)W
o6
(p).
(8.8)
Все
эти
передаточные функции можно характеризовать некото-
рым набором показателей.
Для
определения показателей любой
передаточной функции
и, в
частности, передаточной функции
разомкнутой системы
(8.8)
представим
W(p)
в
виде дроби
W(p)
=
W
y
(p)W
o6
lp)
=
£$,
(8.9)
где
Р(р) и Q(p)
—многочлены
по р
степени
тип
соответствен-
но.
Далее предполагается,
что
многочлены
Р(р) и Q(p) не со-
держат общих множителей.
Для
физически
осуществимых
систем
степень
числителя
передаточной
функции
не
может
быть
больше
степени
зна-
менателя:
т</г.
(8.10)
Значения
р, при
которых передаточная функция обращается
в
нуль, называются
нулями
передаточной функции. Нули
яв-
ляются корнями уравнения
0.
(8.11)
Значения
р, при
которых передаточная функция обращается
в
бесконечность, называются
полюсами
передаточной функции. По-
люсы являются корнями уравнения
Q(p)
=
0.
(8.12)
Передаточная функция
W(p)
(8.9), таким образом, имеет
m
ну-
лей
и п
полюсов.
108
ХАРАКТЕРИСТИКИ
АВТОМАТИЧЕСКИХ СИСТЕМ
[ГЛ. 8
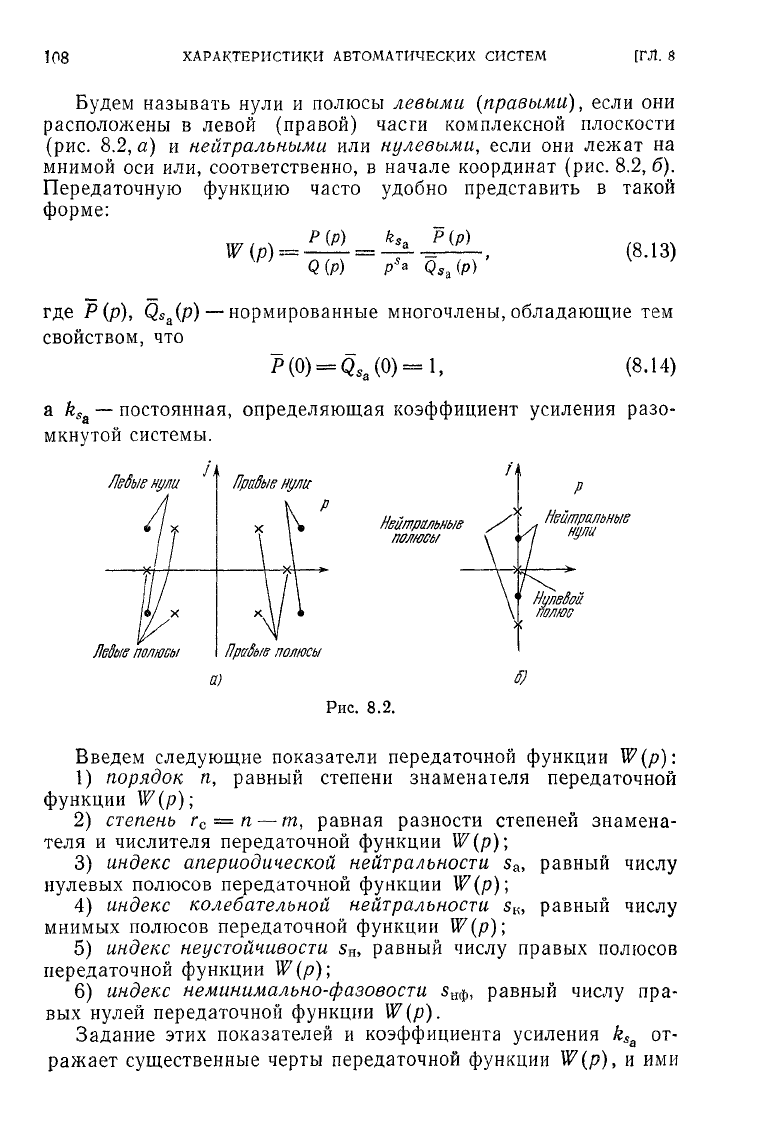
Будем называть нули и полюсы
левыми
(правыми), если они
расположены в левой (правой) части комплексной плоскости
(рис.
8.2, а) и
нейтральными
или
нулевыми,
если они лежат на
мнимой
оси или, соответственно, в начале координат (рис. 8.2, б).
Передаточную функцию часто удобно представить в такой
форме:
Q(P)
Qs.
d
(P)
где Р(р),
Qs
a
{p)
— нормированные многочлены, обладающие тем
свойством,
что
P(0)
=
Q
ea
(0)
=
l
f
(8.14)
a
k
SR
— постоянная, определяющая коэффициент усиления
разо-
мкнутои системы
Лвбывнули
*
в
нули
Нейтральные
полюсы
ЛдВыв
полюсы
Прабы
в
полюсы
Нейтральные
нули
''
Нулвбой
полюс
а)
Рис.
8.2.
Введем следующие показатели передаточной функции
W(p):
1)
порядок
/г,
равный степени знаменателя передаточной
функции
W(p);
2)
степень
r
G
=
n
—
m,
равная разности степеней знамена-
теля и числителя передаточной функции
W(p)\
3)
индекс
апериодической
нейтральности
s
a
,
равный числу
нулевых полюсов передаточной функции
W(p)\
4)
индекс
колебательной
нейтральности
s
K
,
равный числу
мнимых полюсов передаточной функции
W(p)\
5)
индекс
неустойчивости
s
H
,
равный числу правых полюсов
передаточной функции
W(p)\
6)
индекс
неминимально-фазовости
5
нф
,
равный числу пра-
вых нулей передаточной функции
W
(р).
Задание этих показателей и коэффициента усиления
k
Sa
от-
ражает существенные черты передаточной функции
W(p)
9
и ими
§8
31
ПОНЯТИЯ О ПРОЦЕССАХ В АВТОМАТИЧЕСКИХ СИСТЕМАХ 109
можно характеризовать те или иные свойства системы, опреде-
ляемой этой передаточной функцией.
Так,
для передаточной функции электродвигателя относительно
угла
поворота
W
№
=
V
(
8Л5
)
показатели равны: порядок п = 2, степень
r
c
= n —
m
= 2, индекс аперио-
дической нейтральности
s
a
= 1, индекс колебательной нейт ^
ральности
s
K
= 0, индекс неминимально-фазовости
Янф
= 0,
п
<^/<Ч
коэффициент
усиления
k\
=
&
д
.
Sv
NN
Для передаточной функции мостиковой цепи (рис. 8.3) /
а 0
U7(p)=
¥TT1
T = RC (816)
^
показатели таковы: порядок п = 1, степень
г
с
=
п
—
m
= Рис. 8.3.
=
1~1
=о, индекс апериодической нейтральности
5
а
= 0, ин-
декс колебательной нейтральности
s
K
= 0, индекс неустойчивости
s
H
= 0,
индекс иеминимально-фазовости
Янф
= 1, коэффициент усиления
k
0
=-Q"
#
§
8.3.
Понятия
о
процессах
в
автоматических
системах
Уравнение обычной автоматической системы, а также авто-
матической системы с положительной внутренней обратной
связью имеет вид (8.1):
Изображениям и передаточным функциям в этом уравнении со-
ответствуют
оригиналы—функции
времени. По определению
преобразования Лапласа
Z(p)
=
L{z(t)},
X
Q
(p)
=
L{x
0
(t)},
F{p)
=
L{f(t)} (8.17)
K
3
(p)
=
L{k
3
(t)},
K
B
(p)
=
L{k
B
(t)},
(8.18)
где
oo
Y(p)
=
L {y {t)} =
\y(0
e-P*
dt.
(8.19)
Переходя от изображения (8.1) к оригиналам, что осуществ-
ляется с помощью теоремы свертывания (теорема 6 приложе-
ния
1), получаем
t t
* (0
=
$
h
(т)
fз
(/
-
т)
dx +
\К
(т)
h
(t -
т)
dx
(8.20)
110 ХАРАКТЕРИСТИКИ АВТОМАТИЧЕСКИХ СИСТЕМ [ГЛ.8
или,
что эквивалентно,
t t
2
(0 =
$
К
(t -
т)
/з
(т)
^Т
+
5
^в
а
—
т)
/
в
(т) dx.
(8.21)
о
о
Уравнения
(8.20)
и
(8.21)
описывают
процессы
изменения вы-
ходной величины
z(t),
вызванные задающим
f
3
(t)
и возмущаю-
щим
f
B
(t)
воздействиями, приложенными к замкнутой системе.
Эти процессы существенно зависят от функций времени
k
3
(t)
и
kn(t)—
оригиналов, соответствующих передаточным функциям
Кз(р)
и
Кв(р)>
Функции
k
a
(t)
и
k
B
(t)
определяют собой
времен-
ные
характеристики
автоматической системы.
Уравнения (8.20),
(8.21)
определяют процессы в автоматиче-
ской
системе, вызванные задающим
f
3
(t)
и возмущающим
f
B
(t)
воздействиями, приложенными к ней в один и тот же момент
времени t = 0. В общем же
случае
эти воздействия
могут
быть
приложены в различные моменты времени
t
3
и
t
B
.
Так, в систе-
мах регулирования
t
3
< /
Е
, а в следящих системах
t
3
>
t
B
.
По-
этому для общего случая уравнение
(8.21)
заменяется уравне-
нием
t t
z(t)=\
k
3
(t - x)
f
3
(T)
dx +
\k
B
(t -
T)
f
B
(T)
dr.
(8.22)
Назовем
процесс
вынужденным,
если промежуток времени ме-
жду моментами приложения внешних воздействий
t
3
, t
B
и момен-
том наблюдения равен бесконечности. Полагая в
(8.22)
t
3
=t
B
=
=
—оо,
что соответствует прошествию бесконечно большого
промежутка времени после моментов приложения внешних воз-
действий, и обозначая вынужденный процесс через
z
B
(t),
полу-
чим
B
(t-x)f
B
{t)dx
(8.23)
или,
после замены переменной t — т на т и, значит, —
d%
на dx,
оо оо
2
В
(/)
= \
k
3
(т) /
3
(t-x)dx+\
k
B
(т) /
в
(t - х)
dx.
(8.24)
о
о
Отсюда видно, что вынужденный процесс получается из уравне-
ния
(8.20)
при замене верхнего предела t на оо„ Разность
между
общим процессом z(t)
(8.20)
и вынужденным процессом
z
B
(t)
(8.24)
определяет
свободный,
или
собственный,
процесс,
кото-
рый
мы
обозначим
через
z
c
(t),
так что
z
c
(t)
=
z(t)-z\l)
(8.25)
§8.4]
ХАРАКТЕРИСТИКИ
АВТОМАТИЧЕСКИХ
СИСТЕМ
Ш
или,
после подстановки
(8.20)
и
(8.24)
в (8.25;
оо оо
г
с
(0
=
-
J
К
(т)
/
3
(/
-
г)
dx -
J
&
в
(т)
f
в
(<
-
т) dx.
(8.26)
Общий,
или
полный,
процесс
z(t) в автоматической системе
представляет собой
сумму
вынужденного
z
B
(t)
(8.24)
и соб-
ственного
z
c
(t)
(8.26)
процессов.
Для более сложных видов автоматических систем, как,
напри-
мер,
комбинированной разомкнуто-замкнутой системы, выраже-
ния
для вынужденного и свободного процессов можно также
привести к
виду,
аналогичному
(8.24)
и (8.26):
оо
o
(Т
)
f
3
{t
_
т) dx +
J
/,•»
(Т
)
/
в (/
_
т) rfT
(
8
.27)
о
_
т) dT
__
J
fe
o
(т) /в (/
__
т) rfT
.
{8
.28)
Но
теперь временные характеристики
k^(t)
и
й^(/)
определяются
из
более сложных изображений, а
именно:
L
{k\
Щ
=
К°
3
(р)
=
К
3
(р)
+
К
в
(Р)
W,
K
(p),
(8.29)
L{kl(t)}
=
K°
B
(p)
=
K
B
(p)
+
KJp)W
iR
(p).
(8.30)
§
8.4.
Характеристики автоматических систем
Как
видно из уравнений (8.21), (8.22), процессы в линейных
автоматических системах представляют собой
сумму
процессов,
вызываемых порознь каждым воздействием. Поэтому при изуче-
нии
свойств системы можно ограничиться изучением ее поведе-
ния
в ответ на одно из этих воздействий. Следовательно, вместо
уравнения
(8.21)
можно рассматривать уравнение
(8.31)
О
ИЛИ
t
(8.32)
где f(t) представляет собой либо задающее
/з(0»
л
ибо
возму-
щающее
/
в
(0
воздействие и, следовательно,
k(t)
равно
k
3
(t),