Чорний О.П., Луговой А.В. и др. Моделювання електромеханічних систем
Подождите немного. Документ загружается.

Електронні сумуючі елементи (суматори) на структурній
схемі подаються безінерційними ланками.
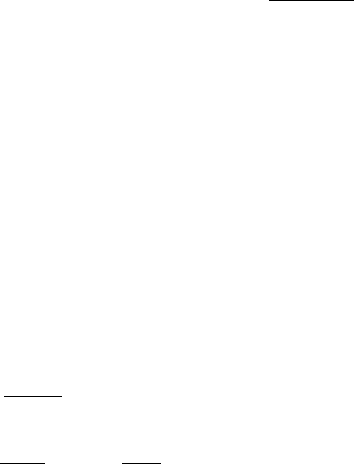
Як приклад розглянемо структурну схему системи Г-Д із
силовим тиристорним збудником (ТЗ) та від’ємними
зворотними зв’язками за струмом з відсічкою та швидкістю
(рис.8.2).
Нелінійні елементи (НЕ) мають характеристику типу
“насичення” і враховують реальні фізичні властивості МП та
обмотки збудження генератора.
При розгляді електропривода за системою Г-Д із ТЗ при
співвідношенні сталих часу
представляють ТЗ
безінерційною або аперіодичними ланками з передатними
функціями
TT
мп mз
<<
(
)
Wp k
тз
= або
()
Wp
k
Tp
тз
тз
=
+ 1
.
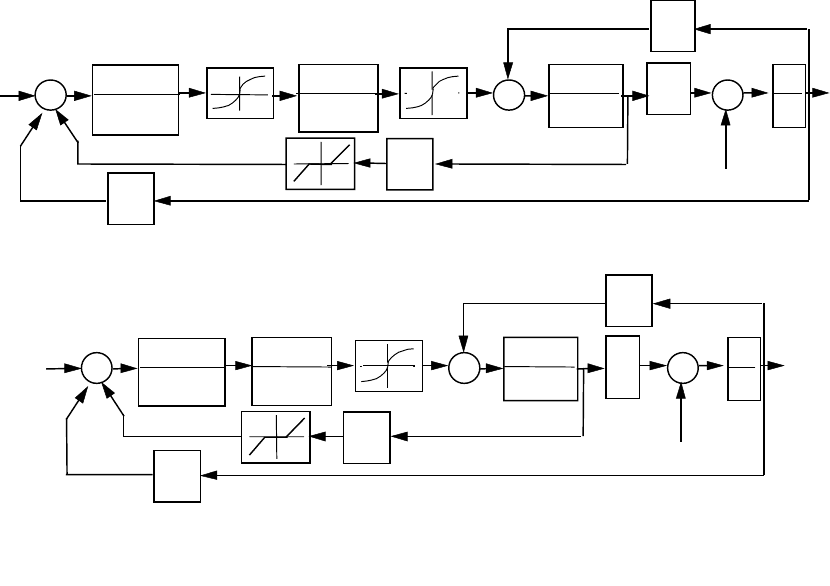
Структурна схема системи Г-Д з магнітним підсилювачем
зображена на рис.8.2, схема системи Г-Д з тиристорним
збудником зображена на рис.8.3.
Для наведеної структурної схеми (рис.8.3) систему
диференційних рівнянь запишемо таким чином:
U
якщо II
kI I якщо II
kI I якщо II
ззс
язсс
зс я зсс я зсс
зс я зсс я отс
=
<
−≥
+≤
⎧
⎨
⎪
⎩
⎪
0, ;
(),
(),
−
;
;
(8.1)
Uk
ззш зш
=
⋅
ω
; (8.2)
UUU U
k
з ззс ззш
=
−
−
(8.3)
T
dU
dt
kUU
тз
тз
тз k тз
=⋅−
, (8.4)
T
dI
dt
U
R
I
oз
oз
oз
oз
oз
=⋅−
1
; (8.5)
(
)
UfI
г oз
= ; (8.6)
185
НЕ НЕОЗМП
k
T
p
м
п
м
п
+
1
k
φ
1
1
/
R
T
p
oз
oз
+
1
1
/
R
T
p
я
е
+
1
J
p
k
φ
ω
M
c
()− ()−
(
)
−
()−
k
з
с
k
з
ш
U
з
Рис.8.2. Структурна схема системи Г-Д з магнітним підсилювачем
НЕОЗТЗ
k
T
p
тз
тз
+
1
k
φ
1
1
/
R
T
p
oз
oз
+
1
1
/
R
T
p
я
е
+
1
J
p
k
φ
ω
M
c
()− ()−
(
)
−
()
−
k
з
с
k
з
ш
U
з
Рис.8.3. Структурна схема системи Г-Д з тиристорним збудником
187

L
dI
dt
Uk IR
я
г
=− −φω
Σ
я
; (8.7)
J
d
dt
kI M
я c
ω
φ=−
. (8.8)
При моделюванні замкнених САК з'являється група рівнянь
замикання, що описують одержання напруги зворотних зв'язків і
рівняння сумуючих елементів.
UUU U U
k
ззшзсзп
=
±
±
±
±... (8.9)
Таким чином, при введенні зворотних зв'язків (за положенням,
за напругою та ін.) усі напруги від кожного з них
підсумовуються в одному вузлі.
Приклад.
Виконаємо дослідження пуску двигуна постійного струму
незалежного збудження П21-110-9К електропривода скіпової
шахтної підйомної установки за системою регулювання з загальним
суматором.
Крім головного зворотного зв’язку за швидкістю
використовується зворотний зв’язок за струмом якоря. Струм якоря
пропорційний моменту, тому, керуючи струмом, формуємо силу дії на
механіку системи. Можна
вважати, що від’ємний зворотний зв’язок
за швидкістю визначає точність регулювання, а зворотній зв’язок за
струмом - його швидкодію.
Зробимо такі припущення: силовий перетворювач являє собою
інерційну ланку першого порядку, регулятор і ланки зворотних зв’язків
- безінерційні.
Тоді можна записати:
()
()
(
)
()
()
;pM
pA
рТ1k
pU
pA
k
)p(
c
ммd
+
−=ω
() ()
()
;pM
pA
k
)p(U
pАR
рТ
)p(i
c
d
яk
м
+=
() () ()()
,pikpkpU
р1
k
k)p(U
сшз
п
рег
±ω−
τ+
=
187
де
- напруга на виході силового перетворювача;
()
Up
τ
-
стала часу силового перетворювача;
k
k
д
=
1
φ
;
()
k
R
k
м
яk
=
φ
2
;
k
U
I
c
з
=
max
max
;
0
maxз
ш
U
k
ω
=
;
. Ap ТТ Т
м e м
() рр=+
2
1+
Знак “+” відповідає додатному зворотному зв’язку, а знак “-” -
від’ємному.
Вирішуючи систему відносно швидкості запишемо, для
усталеного режиму
.kkkk
,М
kk1
kkkk
U
kk1
k
dпегр
с
ш
сdм
з
ш
=
+
−
+
=ω
∓
Із рівняння визначаємо жорсткість характеристик та статизм
системи:
.
)kk1(
M)kkkk(
S,
kkkk
kk1
ш0
ccdм
0cdм
ш
+ω
=
ω
ω∆
=
+
=β
∓
∓
Для необхідного значення жорсткості або статизму системи
можна розрахувати необхідний коефіцієнт підсилювання регулятора
B
.
B k
егр
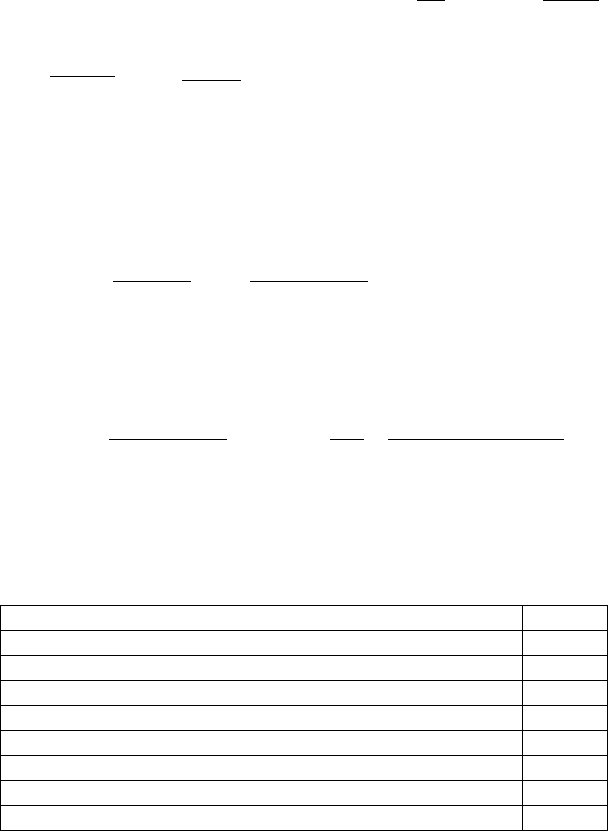
Паспортні та розрахункові дані системи наведені в таблиці 8.1.
Таблиця 8.1.
Параметр Знач.
Номінальна потужність, кВт 2100
Номінальна швидкість, рад/с 9,807
Номінальна напруга, В 860
Номінальний струм, А 2680
Номінальний ККД 0,914
Опір якірної ланки, Ом 0,01711
Момент інерції з урахуванням підйомної установки, кгмP
2
P
78965
Індуктивність якоря, Гн 0,0038
Продовження табл.8.1.
188
Коефіцієнт підсилювання силового перетворювача 86
Стала часу силового перетворювача 0,01
Розрахункові дані
Коефіцієнт ЕРС двигуна , В с 83,04
Механічна стала часу, с 0,0389
Електромеханічна стала часу, с 0,22
Коефіцієнт регулятора 2
Коефіцієнт зворотного зв’язку за струмом 1,96P
.
P
10P
-4
P
Коефіцієнт зворотного зв’язку за швидкістю 0,96
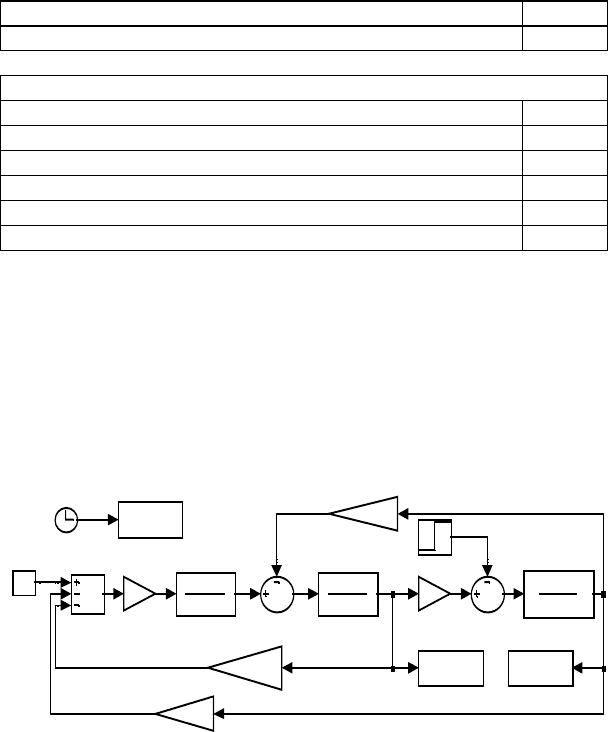
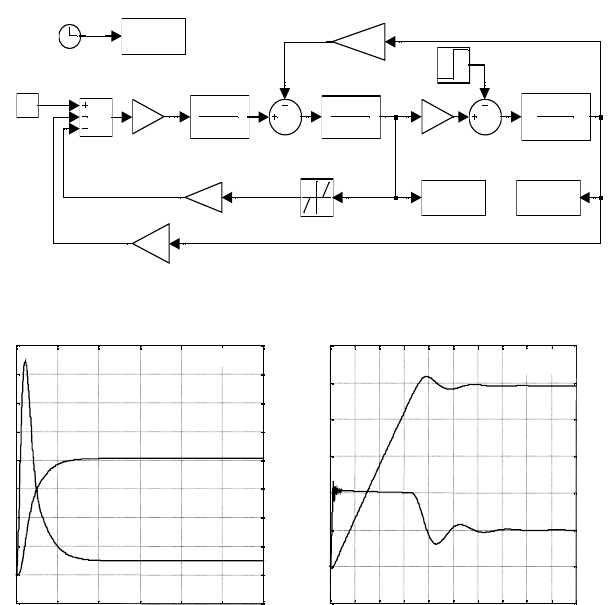
Структурна схема моделі з від’ємними зворотними зв’язками за
швидкістю та струмом при використанні розширення пакета
MATLAB - SIMULINK наведена на рис.8.4.
На рис.8.5 наведена структурна схема моделі з використанням
відсічки за струмом з двократним обмеженням.
На рис.8.6, 8.7. наведені діаграми перехідних процесів
(
)
it та
, у відносних одиницях до номінальних параметрів, отриманих на
вказаній моделі.
()
ω t
i
Ток
86
0.03s+1
ТП
w
Скорость
83.04
С
83.
С
Мс
0.000196
Кт
0.96
Кс
5
Кр
10
Задание
Время
Sum1
Sum
t
1
78965s
58.8
0.22s+1
Рис.8.4. Структурна схема моделі з від’ємними зворотними зв’язками
за швидкістю та струмом із загальним суматором
189
i
Ток
86
0.03s+1
ТП
w
Скорость
83.04
С
83.
С
Мс
0.05
Кт
0.96
Кс
1
Кр
10
Задание
Время
Sum1
Sum
Dead Zone
t
1
78965s
58.8
0.22s+1
Рис.8.5. Структурна схема моделі з від’ємними зворотними зв’язками
за швидкістю та струмом з відсічкою із загальним суматором
0 0.5 1 1.5 2 2.5 3
-
0
2
4
6
8
10
12
14
16
1
0.8
0.6
0.4
0.2
0
ω
в.о
І
в.о
1.2
1.4
1.6
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-
0
1
2
3
4
5
6
0
0.1
0.2
0.3
0.4
0.5
0.6
I
ω
в.о
в.о
Рис.8.6. Рис.8.7.
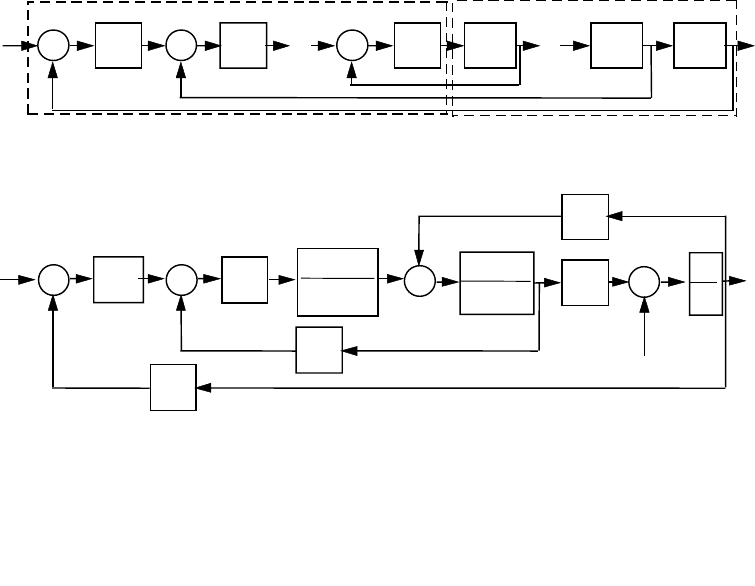
8.2. Моделювання систем підпорядкованого регулювання
Розглянемо структурну схему системи підпорядкованого
регулювання.
Об'єкт керування поділяється на
підсистем, -вкладених
з одного в другий контурів керування, причому вихідний сигнал
попереднього контуру керування є завданням для наступного
контуру (рис.8.8.).
n n
190
За такими принципами побудовано більшість систем
керування електроприводами механізмів технологічних об’єктів.
Найчастіше застосовується двоконтурна САК із зворотними
зв’язками за швидкістю та струмом. Розглянемо структурну
схему двоконтурної САК електроприводом за системою
тиристорний перетворювач - двигун постійного струму (ТП-Д)
(рис.8.9) з внутрішнім контуром регулювання струму якоря і
зовнішнім контуром регулювання
кутової швидкості.
Як регулятор струму (
) та швидкості ( ) найчастіше
застосовуються:
pc
W
pш
W
- пропорційний (П-регулятор) із передатною функцією
()
kpW
n
=
; (8.10)
- пропорційно-інтегральний (ПІ-регулятор) із передатною
функцією
()
p
1
bkpW
ni
+= . (8.11)
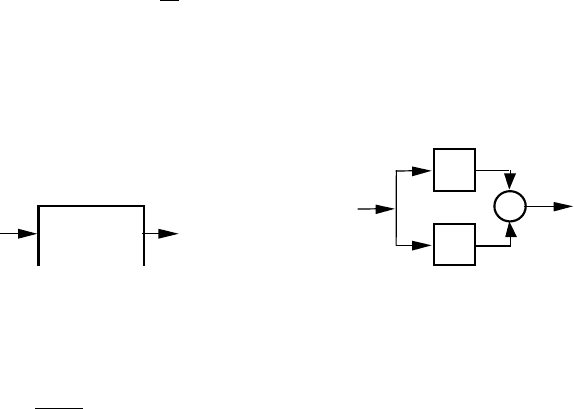
П-регулятор є частковим випадком ПІ-регулятора, при
. Тому далі розглянемо моделювання ПІ-регулятора. Його
структурна схема має вигляд, поданий на рис.8.10.а), або у
вигляді зручному для моделювання - на рис.8.10. б).
b = 0
U
вих
U
вх
W
пі
(р)
U
вх
k
b/p
U
2
U
1
U
вих
a) б)
Рис.8.10. Структурна схема ПІ-регулятора
За останньою структурою складемо систему рівнянь
регулятора:
⎪
⎩
⎪
⎨
⎧
⋅+=
⋅=
.kUUU
,Ub
dt
dU
вх2вих
вх
2
(8.12)
191
......
Об
’
єкт
САК
W
p
1
U
з
W
p
2
W
p
n
W
обп
W
об2
W
об1
Рис.8.8. Структурна схема системи підпорядкованого регулювання
k
T
p
п
µ
+ 1
1
1
/
R
T
p
я
е
+
1
J
p
ω
M
c
()
−
()
−
()
−
()
−
k
з
с
k
з
ш
U
з
W
p
с
W
p
ш
kφ
kφ
Рис.8.9. Структурна схема двоконтурної САК підпорядкованого регулювання електропривода ТП-Д
193