Чикуров Н.Г. Алгоритмическое и программное обеспечение компьютерных систем управления
Подождите немного. Документ загружается.

20
Редактор УП, представляющий собой многодокументное MFC-
приложение, служит для создания, редактирования и хранения УП в
кодах ISO-7 bit и вызывается из интерфейса оператора. Интерфейс
оператора обеспечивает следующие режимы работы: ручной,
покадровый, автоматический и режим настроек, причем в каждом
режиме можно вызвать редактор УП (рис. 1.5).
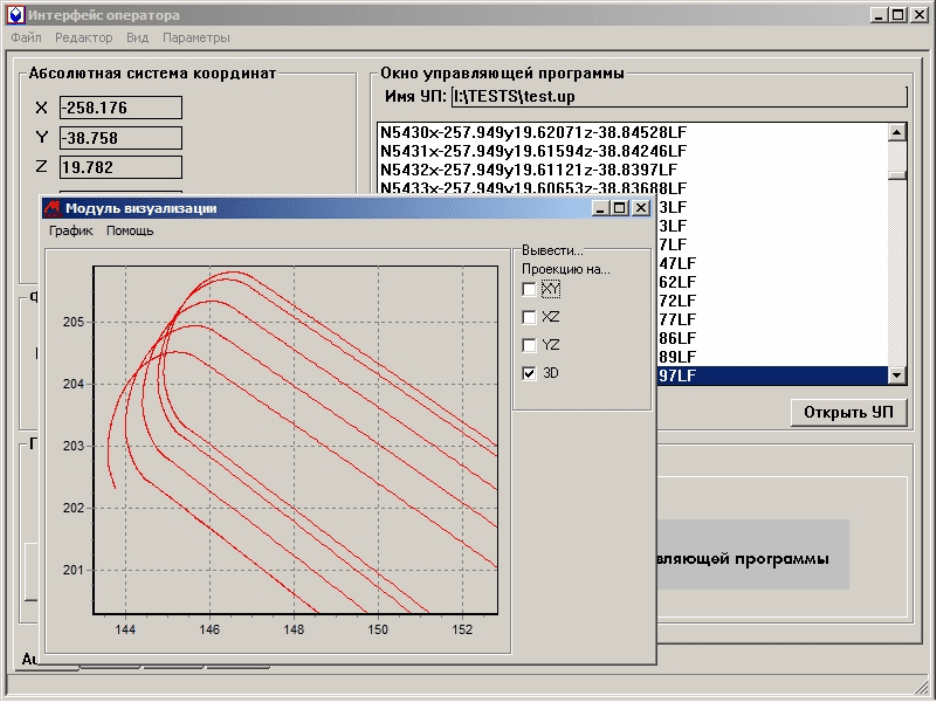
Независимый модуль визуализации, использующий библиотеку
Direct 3D, предназначен для отображения контура обработки в
трехмерном пространстве в реальном времени. Он позволяет строить
трехмерные линии и проекции в перспективе, масштабировать
объемные графики, поворачивать изображение в ручном и
автоматическом режимах, а также получать данные из файла для
построения трехмерных графиков.
Рис.1.5. Окно редактора УП
21
Третья компонента СЧПУ – контроллер управления
приводами и электроавтоматикой. Если электроприводы подачи
включены, то с интервалом 1 мс в приводных контроллерах
инициируются функции микроинтерполяторов и с интервалом 100 мс
в главном компьютере инициируется функция макроинтерполятора
(по 10 итераций в каждом цикле). Все функции автоматически
синхронизируются, поэтому слежения за их взаимным состоянием не
требуется. Интервалы инициации функций микро- и
макроинтерполятора можно изменять с учетом того, что период
микроинтерполяции должен быть кратен периоду макроинтерполяции.
В микроинтерполяторе используется принципиально новый
алгоритм сплайн-микроинтерполяции, отличающийся простотой и
высокой точностью. Приращения координат из макроинтерполятора
по последовательному каналу Ethernet передаются в приводной
контроллер, выдающий управляющие воздействия на электропривод с
периодом 1 мс. Тем самым обеспечивается необходимая для
качественной обработки детали частота управляющих воздействий на
электроприводы при низкой скорости обмена информацией между
главным компьютером и контроллерами, что позволяет значительно
снизить требования к пропускной способности канала. Кроме того,
благодаря большому периоду времени (100 мс), выделяемому
главному компьютеру для вычислений, можно решать достаточно
сложные задачи управления.
Микроинтерполятор обладает оригинальным свойством: кроме
приращений пути, он рассчитывает очищенные от воздействия помех
значения скоростей и ускорений, что позволяет применять для
управления электроприводами эффективные комбинированные
регуляторы. В состав микроинтерполятора входит модуль
оперативного разгона-торможения, который осуществляет задаваемое
с пульта оператора изменение скорости подачи, аварийное
торможение, оперативное изменение скорости подачи по внешнему
сигналу (например, при нарезании резьб резцом).
СЧПУ класса ICNC относится к типу открытых
распределенных систем. В зависимости от сложности объекта
управления ее можно легко модифицировать, дополнять новыми
модулями и компонентами и заменять существующие без
перестройки всей системы. Постепенного развития функций систем,
замены отдельных компонентов без перестройки всей системы.
22
Применение универсальных и стандартизованных интерфейсов
обеспечивает возможность подключения к системе модулей,
разработанных сторонними разработчиками и относительно не
сложную переносимость всей системы или отдельных ее компонент
на другие платформы.
Расчет пространственных траекторий движений инструмента в
реальном времени дает возможность управлять точностью обработки.
Его использование предусматривает автоматический контроль
размеров обрабатываемых деталей с помощью измерительных
головок и создание в памяти компьютера математической модели
отклонений реальной поверхности от заданной. Благодаря
динамической коррекции размеров автоматически оптимизируется
точность обработки сложнопрофильных деталей в реальном
времени, что сложно выполнить в обычных СЧПУ даже при
использовании современных CAD-САМ-систем.
1.6. Взаимодействие УЧПУ с оператором
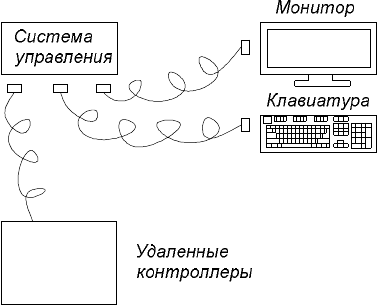
Чтобы осуществить взаимодействие с оператором, терминал
УЧПУ все чаще становится отдельным конструктивом [1] (рис.1.6).
Рис.1.6. Терминал УЧПУ
Инструментом общения оператора с системой управления
являются дисплей и клавиатура. Терминалы УЧПУ подразделяют на
2 группы: пассивные, активные.
В пассивном терминале нет собственного компьютера, поэтому
решение терминальной задачи осуществляется в устройстве ЧПУ (в
23
центральном процессоре), а терминал используется лишь для
отображения результатов решения.
Активный терминал имеет собственный компьютер, и решение
терминальной задачи решается в самом терминале.
Рассмотрим примеры глав терминальных сообщений.
1) “Программа”
Представляет оператору фрагмент УП. Как правило, полный
текст программы не размещается в области экрана, и просмотреть
текст целиком можно лишь перелистывая страницы. Клавиатура
панели оператора позволяет перемещать по полю экрана курсор,
подчеркивающий ту или иную команду. Подчеркнутую команду
можно убрать или изменить в режиме редактирования.
2) “Аварийное предупреждение”
Предназначено для вызова на экран дисплея описания
аварийных предупреждений. В составе описаний аварийного
предупреждения результаты диагностических обследований в виде
кодов отказов или текстовых комментариев. Вывод на экран
описаний аварийных предупреждений осуществляют после того, как
на мониторе появляется признак отказа “ОТКАЗ”.
3) “Внешние сообщения”
Содержит текст внешнего сообщения системе управления.
Например, со стороны сервера или центрального технологического
пульта. Сообщение может состоять из предписаний по выполнению
различного рода подготовительных действий.
4) “Параметры”
Сообщение позволяет оператору просмотреть коды
интересующих его параметров системы и станка и изменить при
необходимости любые из них. Указанные параметры служат для
адаптации системы управления к объекту, для выбора налагаемых на
процесс управления ограничений и др.
5) “Текущее положение”
Сообщение осуществляет индикацию текущего положения
рабочих органов станка:
24
- текущее положение в относительной системе координат;
- текущее положение в системе координат детали;
- текущее положение в абсолютной системе координат;
- путь до конца отработки кадра.
6) “Возврат после прерывания”
Содержит информацию, необходимую при возврате на
траекторию при возобновлении прерванной программы. Причиной
подобного прерывания служат, как правило, поломка или выход из
строя инструмента. На экране монитора появляются следующие
данные:
- исходная позиция повторного запуска;
- путь к точке, в которой было произведено прерывание
программы;
- предыстория М-функций, т.е. список всех М-функций,
выполненных в начале обработки;
- предыстория S-, T-функций.
В процессе замены инструмента нарушается синхронизация
между текущем состоянием прерванной программы и положением
исполнительных органов механизмов цикловой автоматики. Для
ручного восстановления синхронизации оператору предоставлена
предыстория М-,S-,T-функций к моменту прерывания.
7) “Таблица коррекций”
Служит для индикации коррекции инструмента (радиуса фрезы,
длины инструмента). На экран выводится следующая информация:
- номера и величины коррекций инструмента;
- рабочий кадр.
Любой компонент таблицы коррекции может быть изменён.
Оптимальным режимом работы оператора с системой
управления является диалог, состоящий из сообщений и директив.
Сообщение – это та часть системной реакции, которая
отображается на экране и явно приглашает оператора к дальнейшей
работе.
Директива – это совокупность действий оператора (через
клавиатуру панели), который вызывает смену сообщения.
25
Система управления поддерживает процесс принятия решения
оператором с помощью техники меню. Меню предлагает варианты
развития диалога, варианты ответов на вопрос, указывает перечень
виртуальных клавиш.
Виртуальными клавишами называют такие, имена которых
переменны, а их текущие значения динамически отображаются на
экране дисплея. Оператору предлагается на выбор несколько
вариантов директив, сопоставленных отдельным виртуальным
клавишам. Введя директиву, оператор получает их новый набор и т.д.
Применение виртуальных клавиш позволяет резко сократить
число требуемых специальных клавиш. Среди специальных клавиш
особую роль играют режимные, которые настраивают систему
управления на род работы.
1) Режим “Ручное управление”
В этом режиме осуществляют наладочные операции, типа
толчковых (немерных) перемещений исполнительных органов станка,
мерные перемещения на установленное число дискрет, производят
обнуление буферов достигнутых позиций.
2) Режим “Ввод программы”
Вводят в память с клавиатуры или с внешних носителей
управляющие программы, редактируют управляющие программы и
вводят их на внешние носители.
3) Режим «Покадровая отработка»
Выполняет отдельные команды языка ISO – 7 bit или отдельные
независимые кадры управляющей программы.
4) Режим «Автоматическая работа»
Воспроизводится автоматический цикл обработки детали в
соответствии с активизированной управляющей программой ЧПУ.
Контрольные вопросы
1. Чем отличаются задачи машинного масштаба времени от задач
реального времени?
2. Дайте определение распределенной системы управления.
26
3. Что представляет собой вычислительная сеть?
4. Что такое промышленная шина?
5. Какие задачи в компьютерных системах решают промышленные
шины?
6. Какими преимуществами обладает объектно-ориентированное
программирование перед процедурным программированием?
7. Перечислите основные преимущества станков с ЧПУ по
сравнению с универсальными станками.
8. Перечислите основные функции компьютерных систем ЧПУ.
9. Как классифицируются компьютерные системы ЧПУ?
10. Назовите главные задачи управления компьютерных систем
ЧПУ.
11. Какие аппаратные блоки входят в состав устройства ЧПУ типа
CNC?
12. Как организована архитектура СЧПУ класса ICNC? Из каких
компонентов состоит эта система?
13. Назовите основные главы терминальных сообщений.
Расшифруйте их содержание.
27
2. УПРАВЛЕНИЕ ФОРМООБРАЗОВАНИЕМ
ДЕТАЛЕЙ В КОМПЬЮТЕРНЫХ УЧПУ
Ключевые слова:
Алгоритм сплайновой интерполяции, алгоритм сферической
интерполяции, буферный кадр, воспроизведение гиперболы, гладкое
сопряжение сплайнов, дискретность отсчёта перемещений,
дифференциал дуги, дифференциал дуги сплайна, интеграл Римана,
интегратор Стилтьеса, интеграл Стилтьеса, контур обработки,
коэффициенты степенного ряда, круговая интерполяция,
механическое решающее устройство, приращения координат за
период таймера, пяти-координатная обработка, рабочий кадр,
рекуррентные формулы, степенной ряд, схема Горнера, управление
формообразованием, эквидистанта.
2.1. Принцип управления формообразованием детали.
Формообразование детали сводится к отображению
геометрической информации чертежа на деталь посредством
совокупности движений станка. Формообразующее движение
воспроизводится обычно следящими приводами подачи, которые
расположены так, что они соответствуют координатной системе
станка.
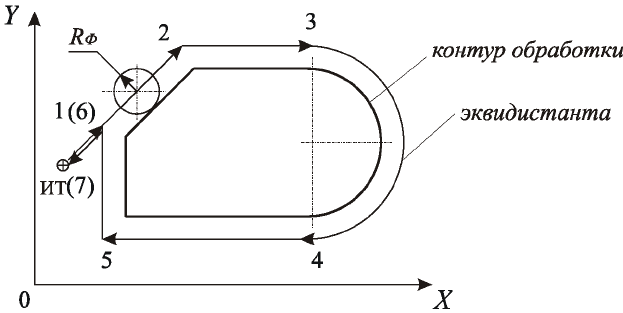
Управляющая программа (УП) состоит из отдельных кадров,
каждый из которых содержит описание очередного элементарного
участка [1] (рис.2.1).
Рис.2.1. Контур обработки: (1-7) – опорные точки;
ИТ – исходная точка; Rф – радиус фрезы
28
Последовательная активизация кадров, сопровождающаяся
выдачей управляющих воздействий на исполнительные приводы
станка, приводит к обходу запрограммированного контура от одной
опорной точки к следующей.
Во избежание приостановки подачи на стыке двух
элементарных участков, то есть в момент активизации очередного
кадра, этот очередной кадр должен быть заранее подготовлен к
оперативным расчётам и обработке. В таком подготовленном виде
кадр называют буферным. Любой кадр (УП), в конце концов,
становится буферным, а затем рабочим.
Информация рабочего кадра укрупнённо описывает траекторию,
которую необходимо воспроизвести на станке. Вычислительную
процедуру устройства ЧПУ, обеспечивающую переход от
укрупнённого описания заданного перемещения к оперативным
командам для исполнительных приводов в функции реального
времени, называют интерполяцией.
Интерполяция осуществляется над целыми числами, каждая
единица которых соответствует наименьшему перемещению или углу
поворота рабочего органа станка. Такое минимальное перемещение
трактуют как дискретность отсчёта перемещений.
В компьютерных устройствах ЧПУ (УЧПУ) дискретность
отсчёта перемещений для большинства станков составляет 1 мкм
(0,001 мм), следовательно, заданные в некотором кадре перемещения,
подготовленные для интерполяции, должны быть представлены
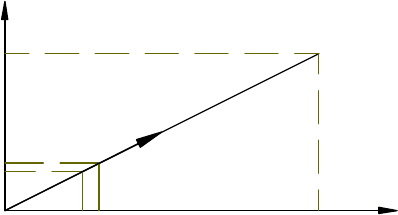
целым числом мкм. Допустим, что в режиме линейной интерполяции
задано движение по прямой: (Х375; Y160) (рис.2.2).
160
Y
X
375
,
kk
XY
X
D
Y
D
Рис.2.2. Схема линейной интерполяции
При дискретности перемещения 1 мкм это эквивалентно
интерполируемому перемещению по Х на 375000 и по Y на 160000
29
дискрет. Исходя из заданной в кадре скорости подачи, несложно
рассчитать время τ полной отработки кадра. Линейная интерполяция
могла бы состоять в равномерной выдаче за это время 375000
управляющих дискрет в привод подачи Y.
Практически интерполяцию в компьютерных УЧПУ организуют
следующим образом: в каждом периоде таймера, работающего с
постоянной частотой, рассчитывают числа дискрет
x
D
и
y
D
, которые
в этом периоде должны быть отработаны приводами подач по
координатам
X
и
Y
. Числа дискрет
x
D
и
y
D
называют
приращениями координат за период таймера.
Результаты расчетов
x
D
и
y
D
внутри интерполятора вероятнее
всего окажутся дробными. Простое округление привело бы к
накоплению ошибок, т.е. к отклонению от заданной траектории.
Поэтому от приращений координат, подготовленных к выдаче в
приводы подачи в очередном периоде таймера, отсекают целые
числа, а дробные остатки накапливают и учитывают в последующих
периодах.
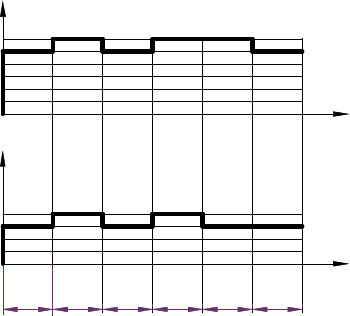
В этой связи картина выдачи приращений в приводы от периода
к периоду неравномерна, что проявляется в виде небольших (не более
1 дискреты) скачков мгновенных скоростей по координатным осям
(рис.2.3).
TTTTTT
X
V
Y
V
t
t
0
0
Рис.2.3
Однако средние скорости по координатным осям за все время
отработки кадра математически точно равны средним значениям.
При круговой интерполяции среднее значение скорости по
одной из координатных осей изменяется по синусоидальному закону,
а по другой – по косинусоидальному закону (рис.2.4) [9].