Bichop R.H. (Ed.) Mechatronic Systems, Sensors, and Actuators: Fundamentals and Modeling
Подождите немного. Документ загружается.

21-12 Mechatronic Systems, Sensors, and Actuators
The coupling between the electrical and mechanical property of the material can be modeled by the
following sets of linear constitutive equations:
(21.11)
where
E = electric field strength [V/m]
D = charge-density (dielectric) displacement [C/m
2
]
T = stress [N/m
2
]
S = strain
s = compliance
ε
= permittivity [F/m]
d, g = piezoelectric coupling coefficients
Design/Selection Considerations
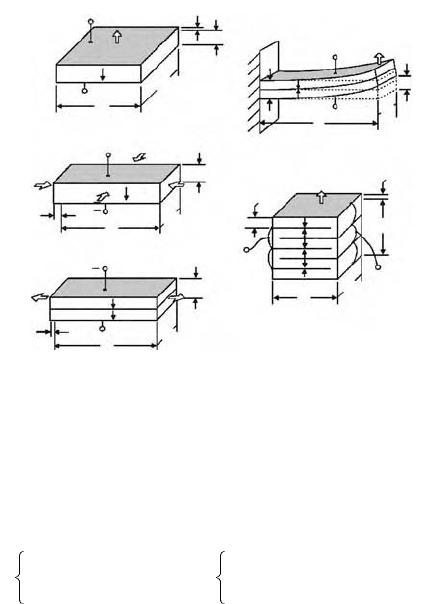
Figure 21.17 shows the common orientation for piezoelectric actuation. With a typical strain of less
than 0.3%, the amount of deflection or deformation is usually the limited factor for piezoelectric
actuators. The most common architectures are the stacked and bending actuation. Piezoelectric actu-
ators are most suited for high bandwidth, large force, and small stroke/deflection applications. They
are widely used in noise and acoustical applications, as well as optical applications, where precision
motion is critical.
Piezoelectric actuators are usually specified in terms of their free deflection and blocked force. Free
deflection (X
f
) refers to displacement attained at the maximum recommended voltage level when the actuator
is completely free to move and is not asked to exert any force. Blocked force (F
b
) refers to the force exerted
at the maximum recommended voltage level when the actuator is totally blocked and not allowed to move.
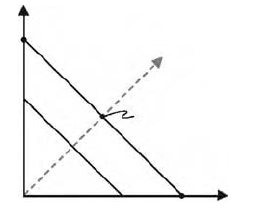
Figure 21.18 shows the static performance curve of a typical piezoelectric actuator (force vs. deflection).
Generally, a piezo actuator must deform a specified amount and exert a specified force, which determines
its operating point on the force vs. deflection line. An actuator is considered optimized for a particular
FIGURE 21.17 Common piezoelectric actuation geometries. (Courtesy of Piezo Systems, Inc.)
Bimorph bending
∆
∆T
out
∆
T
∆
F
out
F
out
L
out
∆
L
out
F
out
F
out
X
out
F
out
V
in
V
in
V
in
V
in
V
in
2 Layer transverse
Transverse
Stack actuator
Longitudinal
T
t
T
T
T = nt
T
P
P
P
P
P
W
W
W
L
L
–
L
L
L
+
+
+
+
+
W
W
–
–
–
Ss
E
TdE⋅+⋅=
DdT
ε
T
E⋅+⋅=
E −gT
ε
T
()
−1
D⋅+⋅=
Ss
D
TgD⋅+⋅=
⇔
9258_C021_Sect001.fm Page 12 Wednesday, October 10, 2007 7:09 PM
Actuators 21-13
application if it delivers the required force at one half its free deflection. High operating voltage, hysteresis,
creep, and fatigue are the main mechanical design considerations.
21.1.2.4 Efficiency
Efficiency is one of the major considerations for any energy conversion process. In most cases, the wasted
energy is converted to heat and increases the device temperature. For electromechanical actuators, heat
(temperature) is one of the most prominent performance-limiting factor as well as failure mode. As
device temperature increases, the underlying conversion efficiency will suffer and dump more energy
into heat, which further increases the device temperature. This is often referred to as thermal runaway.
Therefore, it is very important when designing electromechanical actuators to prevent thermal runaway
and guarantee that under normal operating condition the actuator system achieves thermal equilibrium.
The equilibrium temperature should be maintained below the lowest rated temperature of the compo-
nents, such as the electrical insulation for the windings. The temperature rating for electrical insulations
are listed in Table 21.1.
21.1.3 Power Amplification and Modulation—Switching Power Electronics
As described in the previous section and depicted in Figure 21.2, there are two main functions in an
extended definition of an actuator for mechatronics systems. We have introduced a few energy conversion
mechanisms and the associated actuators. In the second part of this chapter, we will focus on the power
amplification and modulation portion of the actuator. This part of the actuator is traditionally called
the power amplifier or the driver for the corresponding actuator. However, as miniaturization and system
integration become more pervasive, power electrics are being embedded into either the controller (infor-
mation processing unit) or the actuator. It is also the portion where intelligence and additional func-
tionality/feature can be incorporated. For electromechanical actuators, the unmodulated energy source
is electricity. The power amplifier acts as a buffer between the low energy part of the system, where
actuation command is given in low energy electrical signals, and the high energy density electrical signal
that will be converted.
Power amplification can roughly be categorized into two methods, linear and switching. The main
advantage of linear power amplification is the “cleanness” of the signal as compared to the switching
amplifiers. The main drawback is in efficiency, where linear amplifiers tend to run hotter than similar
sized switching amplifiers. However, as with any engineering design, this is only a rule-of-thumb; the
designer needs to analyze the application and select or design the appropriate driver.
Switching amplifiers are made of semiconductor components such as diodes and transistors. These
semiconductor devices either function as a switching element that controls the current flow to the energy
conversion element such as a winding coil, or as an amplification element that modulates the amount of
current flowing into the winding coil. Another advantage of using switching type power amplifiers is that,
with switching, the amplifier stage can be directly controlled by a digital signal from an information
processing device (see Figure 21.1) such as a microcontroller or a microprocessor. This eliminates the need
FIGURE 21.18 Static performance curve of a typical
piezoelectric actuator. (Courtesy of Piezo Systems, Inc.)
Direction of
increasing
voltage
Force
V
max
Deflection
F
b
X
f
V
V
1
V
1
Operating point
optimized produce
maximum work
9258_C021_Sect001.fm Page 13 Wednesday, October 10, 2007 7:09 PM
21-14 Mechatronic Systems, Sensors, and Actuators
for an ADC, which reduces the cost and size of the required electronics. Pulse-width modulation (PWM)
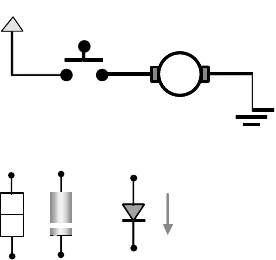
is one good example using binary signal to control electromechanical actuators. Figure 21.19 shows one
simple example of using a switching device to interface with a PMDC motor. As discussed in the previous
section, torque is generated when current is flowing into the armature winding of a PMDC motor. To
turn the motor on and off, we can connect the motor with a DC power source in series with a switch.
When the switch is closed, current flows through the motor and the motor turns. If the switch is opened,
current stops and the motor will eventually stop. Of course, more sophisticated circuit and switching
design is needed for actual implementation.
Nevertheless, this example illustrates the fundamentals of switching power amplification. In this section,
we will focus on switching amplifiers by introducing the fundamental building blocks.
21.1.3.1 Semiconductors
Semiconductors are typically materials consisting of elements from group IV of the periodic table, e.g.,
silicon (Si), germanium (Ge), and cadmium sulfide. Unlike conductors and insulators, semiconductors’
current-carrying capability is significantly affected by the temperature and the amount of incident photons
and the type and amount of impurities in the material. By introducing carefully controlled group V or
III elements (called dopants) into the semiconductors, we can increase or decrease the number of valence
electrons in the semiconductors, respectively. Depending on the type of the dopants, semiconductors
can be separated into:
•
n-type semiconductors: semiconductors doped with donor elements (e.g., arsenic or phosphor group
V elements ) that result in one additional electron freed (free electron) from the crystal lattice as
a charge carrier that is available for conducting.
•
p-type semiconductors: semiconductors doped with acceptor elements (e.g., boron or gallium group
III elements) that results in a missing electron in the lattice structure, which is called a hole. Holes
can be viewed as positive charge carriers or places that accept free electrons.
As will be discussed shortly, the interaction between the n-type and p-type semiconductors under
different orientation forms the basis for all the semiconductor electronic devices. One of the more
interesting aspects of modern electronics is the variety of features that can be obtained with a simple
switching device that opens or closes a connection in a controlled manner. We will discuss a few electronic
elements that are widely used, mainly as a controlled switching element, in power electronics for con-
structing power amplifiers/drivers for electromechanical actuators.
21.1.3.2 Diodes
A diode is a two-terminal electronic device that is constructed by joining a p-type and an n-type
semiconductor together to form a pn junction. Figure 21.20 shows the schematic symbol of a generic
diode. The terminal associated with the p-type material is called the anode and the terminal associated
with the n-type material is called the cathode. If the anode has higher electrical potential (>0.7 V) than
FIGURE 21.19 DC motor under switching control.
FIGURE 21.20 Diode.
Vcc
p
n
V
D
i
D
Cathode
Anode
+
−
9258_C021_Sect001.fm Page 14 Wednesday, October 10, 2007 7:09 PM
Actuators 21-15
the cathode, the diode is said to be forward biased, i.e., V
D
> 0.7 V. Conversely, if V
D
< 0.7 V, the diode
is reverse biased.
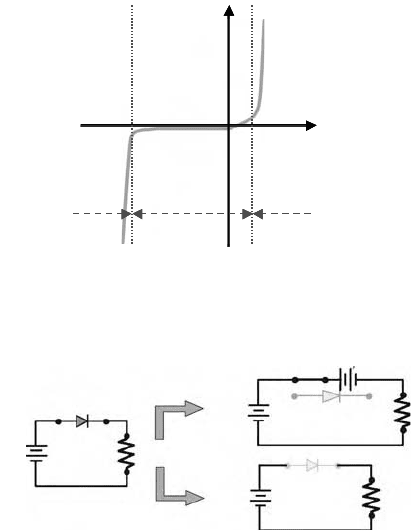
As shown in Figure 21.21, depending on the applied voltage, a diode can operate in three different
regions:
•
Forward biased region: V
D
> V
γ
, where V
γ
is called the forward bias voltage and is typically around
0.7 V for silicon and 0.3 V for germanium. The diode acts as a closed switch, and the anode and
cathode become short-circuited with a slight reverse potential (forward voltage drop) that is equal
to V
γ
, see Figure 21.22.
•
Reverse biased region: V
Z
< V
D
< V
γ
, where V
Z
is the reverse breakdown voltage of the diode. The
diode acts as an opened switch and the circuit is open, see Figure 21.22.
•
Breakdown region: V
D
< V
Z
. The diode again acts as a closed switch and a large current flows
through the diode. This is called the avalanche effect. If the magnitude of the reverse current i
D
is larger than the critical reverse bias current, the device will fail.
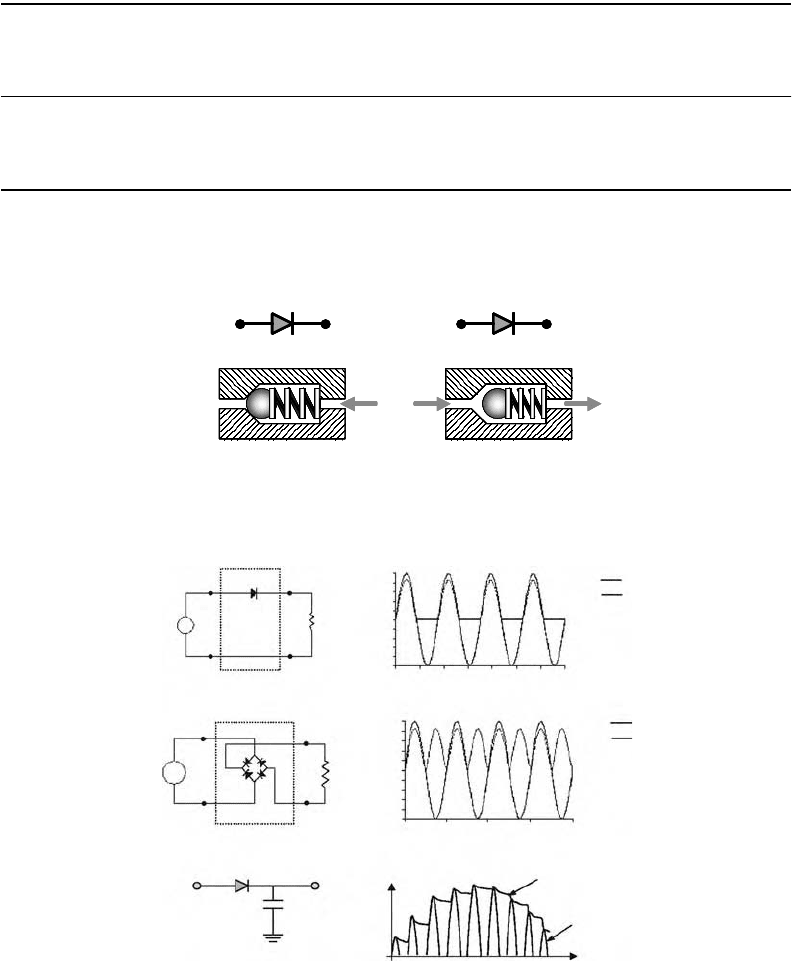
A diode is analogous to a fluid check valve, which allows fluid (current) to flow in only one direction if
the forward pressure is sufficient to overcome the spring force, see Figure 21.23. Table 21.3 summarizes
properties of some typical diodes.
Maximum allowable current through a diode and the reverse breakdown voltage are the two major
design considerations for diodes. The voltage across a diode times the current it carries is the power
loss across the diode that is completely converted into heat. The temperature of a diode can rise
rapidly due to its small size and mass. For safe operation, the temperature of the diode junction should
not exceed 200°C. To improve heat transfer, diodes are commonly mounted on metallic heat sinks.
Signal diodes are rated between
1
/
2
and 1 W. Power diodes can be rated as high as several hundred
kilowatts.
FIGURE 21.21 Diode characteristics.
FIGURE 21.22 Approximating a diode in a circuit.
i
D
V
D
Reverse
bias region
Forward bias
region
Reverse
breakdown
region
V
Z
V
γ
Open
circut
V
in
+
–
+
+
–
–
V
in
>V
γ
V
Z
<V
in
<V
γ
+
–
V
γ
9258_C021_Sect001.fm Page 15 Wednesday, October 10, 2007 7:09 PM
21-16 Mechatronic Systems, Sensors, and Actuators
For switching applications, the reverse-recovery time is another important design parameter. The
reverse-recovery time imposes an upper bound on the frequency at which the diode can be switched on
and off. Attempts to operate a diode above this frequency will result in a decrease in switching efficiency
and may cause severe overheating.
Diodes are widely used in electronic power circuits. They are most widely used for rectification and peak
detection. Figure 21.24 illustrates some of the common diode applications. If multiple diodes are to be
TABLE 21.3 Typical Diode Properties
Relative Power
Maximum
Average Forward
Current [A]
Voltage Drop at
Maximum Average
Forward Current [V]
Maximum
Peak Forward
Current [A]
Reverse
Breakdown
Voltage [V]
Maximum
Junction
Temperature
[°C]
Low 1 0.8 30 1000 175
Medium 12 0.6 240 1000 200
High 100 0.6 1600 1000 200
Very High 1000 1.1 10,000 2000 200
Source: T. Wildi, Electrial Machines, Drivers and Power Systems, Prentice Hall, 2000.
FIGURE 21.23 Analogy between diodes and check valves.
FIGURE 21.24 Common diode applications.
Peak detector
BA157GP
+
~
+
~
–1.0
–2.0
–3.0
–4.0
–5.0
–5.0
–4.0
–3.0
–2.0
–1.0
Bridge rectifier
Half-wave rectifier
R
load
R
load
V
load
V
AC
V
AC
V
AC
V
load
Time
Volatge
Volatge
Volatge
Time(seconds)
Time(seconds)
V
IN
V
IN
V
OUT
V
OUT
V
AC
5.0
4.0
3.0
2.0
5.0
3.0
2.0
1.0
4.0
1.0
0.1
0.1
0.1 0.2 0.2
0.2
0.3
0.3
0.3 0.4
0.4
0
0
0
0
9258_C021_Sect001.fm Page 16 Wednesday, October 10, 2007 7:09 PM

Actuators 21-17
used, diode array can be used. In general, the term diode array implies four or more diodes in a single
package. The most efficient packaging scheme is typically eight diodes or more in a dual inline package
(DIP). Other packages are the single inline package (SIP), the flat pack, and even a surface mount
diode array. Although multiple diode arrays can incorporate different type diodes, the most popular
arrays incorporate a fast, small signal diode such as the 1N4148, and the core driver arrays, which employ
a fast switching, higher current, 100-mA diode.
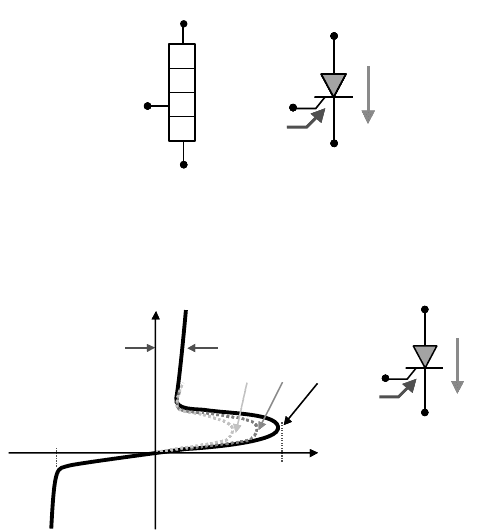
Zener Diode
Recall the current–voltage curve of a diode shown in Figure 21.21.
If a diode is reverse biased to the breakdown region, a large
reverse current will flow through the diode. For most diodes, this
voltage is usually larger than 50 V and may exceed kilovolts.
Zener
(
Avalanche
) diodes are a class of diodes that exhibit a steep break-
down curve with a well-defined reverse breakdown voltage
V
Z
.
This unique breakdown characteristic makes Zener diodes good
candidates for building
voltage regulators
, since they can maintain a stable source voltage under
variable supply as well as varying load impedance. Figure 21.25 shows the special symbol that represents
a Zener diode.
To use the Zener diode as a voltage regulator, it should be reverse biased with a supply voltage higher
than the rated reverse breakdown voltage V
Z
, see Figure 21.26. For an ideal Zener diode, in Figure 21.26,
V
S
> V
Z
, the voltage across the load will equal to V
Z
; hence the load current i
load
and the Zener diode
current can be written as
.
Zener diodes are often rated by their power dissipation, which is
.
Therefore, when selecting Zener diode for voltage regulation applications, it is important to ensure that
i
Zmax
does not exceed the allowable limit. The most common range of the reverse breakdown voltage for
Zener diodes is from 3.3 to 75 V. However, voltages out of this range are available. Some typical power
ratings for Zener diodes are 1/4, 1/2, 1, 5, 10, and 50 W.
21.1.3.3 Thyristors
A thyristor, or a silicon-controlled rectifier (SCR), is a 4-layer semiconductor switch, similar to a diode,
but with an additional terminal to control the instant of conduction. A thyristor has three terminals: an
anode, a cathode, and a gate, see Figure 21.27. One can think of a thyristor as a controllable diode that
the gate terminal provides as a mean of precise control of the instance when the thyristor is to be turned
on, i.e., it is a controlled switch.
FIGURE 21.26 Use Zener diode as simple voltage regulator.
FIGURE 21.25 Zener (avalanche) diode.
V
D
+
−
i
load
V
Z
R
load
----------
and i
Z
V
S
V
Z
–
R
S
------------------
==
P
Zmax
i
Zmax
V
Z
⋅=
+
--
V
Z
R
L
Load
R
S
V
S
i
Z
i
S
i
L
+
---
+
−
Unregulated
source
Voltage
regulator
+
−
9258_C021_Sect001.fm Page 17 Wednesday, October 10, 2007 7:09 PM
21-18 Mechatronic Systems, Sensors, and Actuators
Figure 21.28 shows the current–voltage characteristics of a thyristor. To turn on (short or conduct) a
thyristor, two conditions have to be satisfied:
1. The anode (A) and cathode (K) terminal has to be forward biased, i.e., the anode voltage needs
to be higher than the cathode voltage.
2. A gate current I
G
has to flow into the gate for a sufficient amount of time, typically, a few
microseconds. The gate current can be generated by a short positive voltage pulse applied across
the gate (G) and cathode (K) terminal. The minimum amount of gate current that is required to
turn on a thyristor is called the latching current.
When the thyristor is turned on, the amount of current flowing through the device I
SCR
is limited by
the rest of the circuit impedance. Once the thyristor is turned on, the gate terminal loses control of the
device, i.e., we cannot use the gate to turn off the device. The thyristor will only turn off if the anode
current I
SCR
goes to zero, after which the gate terminal can assert control to turn on the device again.
Obviously, the thyristor can also be switched on by exceeding the forward breakdown voltage V
FB
.
However, this is usually considered a design limitation and switching is normally controlled with a gate
voltage. If the gate (G) terminal is shorted with the cathode (K), the thyristor cannot be turned on, even
if V
AK
is forward biased. One can think of the thyristor as a normally opened switch with a detent. Once
the switch is closed, no additional control is needed. Figure 21.29 shows the operation of a thyristor
driving a simple resistive load under a sinusoidal bipolar source voltage V
S
. In Figure 21.31, the gate
voltage V
G
will be the command or control input.
When the thyristor is reverse biased, the gate (G) to cathode (K) terminals should not be forward
biased to prevent reverse breakdown of the first pn junction of the thyristor, see Figure 21.27. The reverse
breakdown voltage V
RB
, the latching current, the current and power rating, and the rate of rise of voltage
are the more important design parameters for selecting a thyristor. When the voltage across the thyristor
is suddenly applied or increased rapidly, the thyristor may turn on even if the gate current (voltage) is
FIGURE 21.27 Thyristor and its schematic symbol.
FIGURE 21.28 Thyristor (SCR) characteristics.
p
n
p
n
Gate (G)
Cathode (K)
A
G
K
I
SCR
+
Ð
Anode (A)
V
AK
I
g
Forward voltage drop
(conducting)
Reverse breakdown
voltage
Forward breakdown
voltage
1Ð2 [V]
I
g2
< I
g1
< I
g0
A
G
K
I
SCR
I
SCR
+
Ð
V
AK
V
AK
V
FB
V
RB
I
g
9258_C021_Sect001.fm Page 18 Wednesday, October 10, 2007 7:09 PM
Actuators 21-19
zero. A typical rate of voltage change that will induce thyristor turn-on is about 50 V/
µ
s. To prevent
undesired conduction due to a large rate (high frequency) of voltage variation, a snubber circuit, see
Figure 21.30, is often connected in parallel with the thyristor to filter out the high frequency voltage
variations. The snubber circuit is essentially a passive RC low-pass filter. The selection of the snubber
resistance R
S
and capacitance C
S
can use the following formula:
(21.12)
where R
L
and L
L
are the load inductance and load resistance, respectively. V
Amax
is the maximum anode
voltage and (dV/dt)
max
is the maximum expected rate of raise of voltage across the anode and cathode.
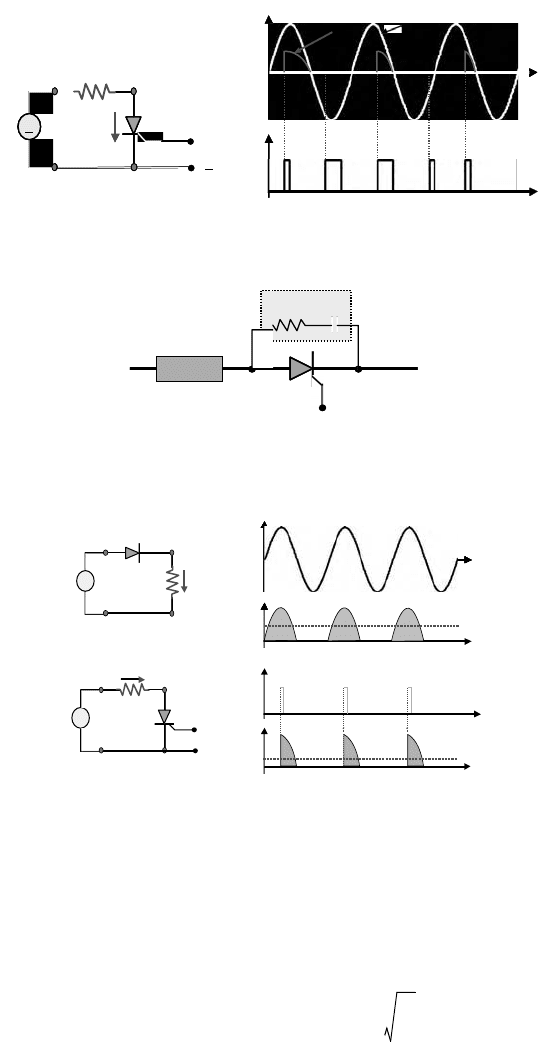
Unlike diodes used in rectifier circuits that can only rectify the input AC voltage to an average DC
voltage, thyristors can be used to build controlled rectifiers that can rectify AC sources and modulate the
average output DC voltage by modulating the firing timing of the gate voltage/current, see Figure 21.31.
FIGURE 21.29 Thyristor driving a resistive load.
FIGURE 21.30 Snubber circuit.
FIGURE 21.31 Controlled (thyristor) and uncontrolled (diode) rectifications.
+
+
V
s
V
s
R
s
i
s
i
s
i
s
V
s
V
g
V
g
Load
R
L
, L
L
Snubber
R
S
C
S
Load
Load
V
S
R
S
V
G
V
L
V
G
V
L
V
S
V
L
R
L
V
S
V
L
Half-wave rectification using diode
+
−
+
+
−
−
+
−
+
−
Half-wave rectification usin
g
th
y
ristor
C
S
V
Amax
2
L
L
dV/dt()
max
2
-------------------------------
and R
S
2
L
L
C
S
----- R
L
–==
9258_C021_Sect001.fm Page 19 Wednesday, October 10, 2007 7:09 PM
21-20 Mechatronic Systems, Sensors, and Actuators
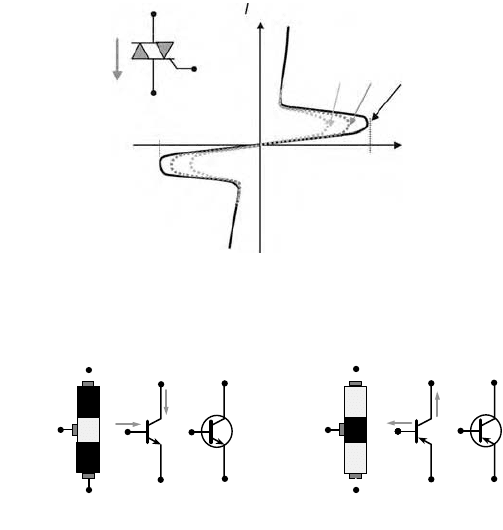
Tr i a c
The thyristor can only be turned on in the forward biased direction. A triac is a controlled switch that
is equivalent to a pair of thyristors that are connected in an anti-parallel configuration, see Figure 21.32.
As depicted in Figure 21.32, a triac can be turned on in both the reverse and forward directions.
21.1.3.4 Transistors
A transistor is a semiconductor device that has three or more terminals and can provide power amplifi-
cation and switching. As we have seen in the previous discussions, electronic switching can be accom-
plished through either diodes or thyristors. Diode switching does not provide any control freedom. A
thyristor is a three-terminal device and the third (gate) terminal can be used to control and switching
instant. However, one drawback of thyristor switching is that the switching control is only in one direction,
i.e., the gate terminal can only be used to turn on the device. The thyristor switch can only be turned
off by dropping the anode current to zero.
A transistor is a special semiconductor device that can be used for power amplification by modulating
a relatively large current between or voltage across two terminals using a small control current or voltage,
and switching by effectively opening and closing the connection between two terminals using a controlled
signal on the third terminal.
Transistors form the basis of modern electronics and are the fundamental building blocks for digital
electronics, operational amplifiers, and power electronics. There are three common types of transistors,
bipolar junction transistors (BJTs), metal-oxide field effect transistors (MOSFETs), and insulated gate
bipolar transistors (IGBTs).
Bipolar Junction Transistors (BJTs)
A bipolar junction transistor is a three-layer device that is made of the p-n-p or the n-p-n combinations
of semiconductors, see Figure 21.33. BJTs have three terminals connected to each of the three layers called
FIGURE 21.32 Tr ia c cha r a c terist i c.
FIGURE 21.33 Biploar junction transistors (BJTs).
–
+
V
triac
V
triac
l
triac
l
triac
l
G2
<
l
G1
<
l
G0
Gate
n-p-n transistor
n
n
p
Collector (C)
Emitter (E)
Base (B)
i
C
i
C
C
E
B
C
E
B
n
n
p
i
B
i
B
n
n
p
nn
nn
pp
p
p
n
Collector (C)
Base (B)
C
E
B
C
E
B
p
p
n
p
p
n
pp
pp
nn
p-n-p transistor
Emitter (E)
9258_C021_Sect001.fm Page 20 Wednesday, October 10, 2007 7:09 PM
Actuators 21-21
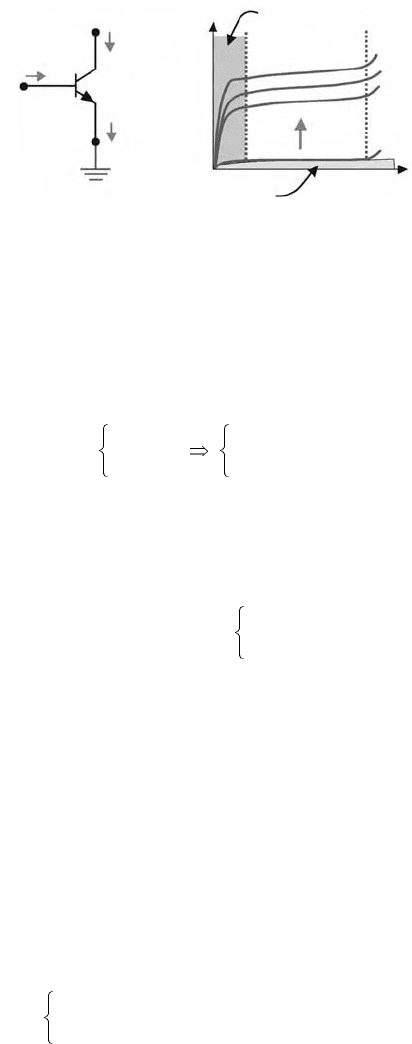
collector (C), emitter (E), and base (B). Figure 21.34 shows the operation of an n–p–n type BJT under
a common emitter type connection. BJTs can operate in three regions:
1. Cutoff—When the base-emitter voltage is less than the turn-on voltage V
γ
, the base current i
B
will
be negligible. The transistor is in the cutoff region and no current will flow through the collector
and emitter terminal, i.e.,
Typically, V
γ
= 0.6 − 0.7 V. In this mode, the transistor from C to E can be viewed as an open
connection. This is analogous to the closed flow control valve.
2. Active Linear—When V
BE
= V
γ
, the transistor is in the active linear region, where
In this mode, the transistor can be viewed as a current-controlled current amplifier, where the
collector current i
C
is proportional to the base current i
B
. The proportionality constant (current
amplification factor or current gain)
β
= 20 ~ 200, is often denoted as h, hf, or h
FE
in the data
sheets. In this mode, the connection between the terminals C and E can be viewed as closed. This
is analogous to a partially opened flow control valve, where the amount of the fluid (current) flow
is proportional to the size of the valve opening (base current magnitude). The power dissipation
across the transistor P
BJT
is
P
BJT
= i
C
· V
CE
3. Saturation—When the base current i
B
is larger than the maximum available collector current i
C
,
the transistor is in the saturation region, where
(21.13)
In this mode, the transistor can be viewed as a closed switch between the terminals C and E. The
collector current i
C
is controlled (determined) by the collector circuit. This is analogous to a
completely opened flow control valve, where the flow is determined by the source and the load.
Note also that when the transistor is in saturation, the collector-emitter voltage drop is maintained
at a small value called the saturation voltage V
SAT
.
FIGURE 21.34 Characteristics of a common emitter n–p–n BJT.
Active
linear
Saturation
V
CE
V
CE
V
BE
i
C
(mA)
Cutoff
Breakdown
i
C
i
E
E
C
+
–
–
+
B
i
B
i
B
Ψ
V
BE
V
γ
<
i
B
0=
i
C
0≈
V
CE
0≥
V
BE
= V
γ
and
i
C
β
i
B
⋅=
V
CE
V
γ
>
i
B
i
C
/
β
>
V
BE
V
γ
=
and V
CE
V
SAT
0.2 V≈=
9258_C021_Sect001.fm Page 21 Wednesday, October 10, 2007 7:09 PM