Bhushan B. Nanotribology and Nanomechanics: An Introduction
Подождите немного. Документ загружается.

484 Marina Ruths and Jacob N. Israelachvili
Friction force F (mN)
Time (min)0
60
50
40
30
20
10
0
12
Steady-state
Transition
Tran-
sition
n= 3 layers n = 2 layers n =1
v
v
v
1.6 nm
F
s
F
k
F same
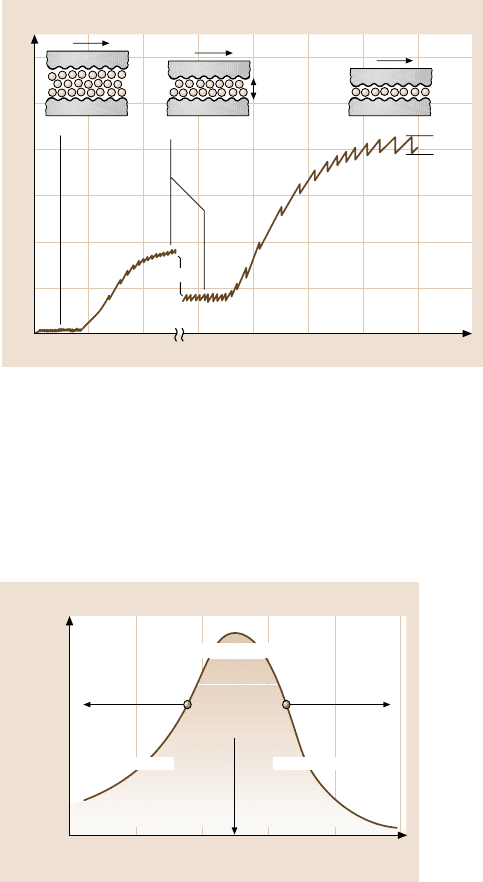
Fig. 9.27. Measured change in friction during interlayer transitions of the silicone liquid oc-
tamethylcyclotetrasiloxane (OMCTS), an inert liquid whose quasi-spherical molecules have
a diameter of 0.8 nm. In this system, the shear stress S
c
= F/A was found to be constant as
long as the number of layers, n, remained constant. Qualitatively similar results have been
obtained with other quasi-spherical molecules such as cyclohexane [335]. The shear stresses
are only weakly dependent on the sliding velocity v. However, for sliding velocities above
some critical value, v
c
, the stick–slip disappears and sliding proceeds smoothly at the kinetic
value (after [275], with permission)
Adhesion hysteresis/
Friction
Temperature T (qC)
05010 20 30 40
Load, velocity,
chain density
Chain fluidity,
chain dilution
T
0
Liquid-like
Solid-like
Amorphous
Fig. 9.28. Schematic friction phase diagram representing the trends observed in the boundary
friction of a variety of different surfactant monolayers. The characteristic bell-shaped curve
also correlates with the adhesion energy hysteresis of the monolayers. The arrows indicate
the direction in which the whole curve is dragged when the load, velocity, etc., is increased
(after [292], with permission)

9 Surface Forces and Nanorheology of Molecularly Thin Films 485
forces can, therefore, be represented on a friction phase diagram such as the one
shown in Fig. 9.28. Experiments have shown that T
0
, and the whole bell-shaped
curve, are shifted along the temperature axis (as well as in the vertical direction)
in a systematic way when the load, sliding velocity, etc., are varied. These shifts
also appear to be highly correlated with one another, for example, an increase in
temperature produces effects that are similar to decreasing the sliding speed or load.
Such effects are also commonly observed in other energy-dissipating phenom-
ena such as polymer viscoelasticity [346], and it is likely that a similar physical
mechanism is at the heart of all such phenomena. A possible molecular process un-
derlying the energy dissipation of chain molecules during boundary-layersliding is
illustrated in Fig. 9.29, which shows the three main dynamic phase states of bound-
ary monolayers.
In contrast to the characteristic relaxation time associated with fluid lubricants,
it has been established that for unlubricated (dry, solid, rough) surfaces, there is
a characteristic memory distance that must be exceeded before the system loses all
memory of its initial state (original surface topography).The underlying mechanism
for a characteristic distance was first used to successfully explain rock mechanics
and earthquake faults [347] and, more recently, the tribological behavior of unlu-
bricated surfaces of ceramics, paper and elastomeric polymers [314,348]. Recent
experiments [285,344,345,349] suggest that fluid lubricants composed of complex
branched-chained or polymer molecules may also have characteristic distances (in
addition to characteristic relaxation times) associated with their tribological behav-
ior –the characteristic distancebeing thetotal sliding distancethat must beexceeded
before the system reaches its steady-state tribological conditions (see Sect. 9.8.3).
Solid-like Amorphous Liquid-like
a) b) c)
Fig. 9.29. Different dynamic phase states of boundary monolayers during adhesive contact
and/or frictional sliding. Solid-like (a) and liquid-like monolayers (c) exhibit low adhesion
hysteresis and friction. Increasing the temperature generally shifts a system from the left
to the right. Changing the load, sliding velocity, or other experimental conditions can also
change the dynamic phase state of surface layers, as shown in Fig. 9.28 (after [292], with
permission)
486 Marina Ruths and Jacob N. Israelachvili
Abrupt versus Continuous Transitions Between Smooth and Stick–Slip Sliding
An understanding of stick–slip is of great practical importance in tribology [350],
since these spikes are the major cause of damage and wear of moving parts. Stick–
slip motionis a verycommon phenomenonand is also the cause of sound generation
(the sound of a violin string, a squeaking door, or the chatter of machinery), sensory
perception(taste textureand feel), earthquakes,granularflow, nonuniformfluid flow
such as the spurtingflow of polymericliquids, etc. In the previoussection, the stick–
slip motion arising from freezing–melting transitions in thin interfacial films was
described.There areother mechanismsthat can giverise to stick–slipfriction,which
will now be considered. However, before proceeding with this, it is important to
clarify exactly what one is measuring during a friction experiment.
Most tribological systems and experiments can be described in terms of an
equivalent mechanical circuit with certain characteristics. The friction force F
0
,
which is generated at the surfaces, is generally measured as F at some other place
in the set-up. The mechanical coupling between the two may be described in terms
of a simple elastic stiffness or compliance, K, or as more complex nonelastic coef-
ficients, depending on the system. The distinction between F and F
0
is important
because, in almost all practical cases, the applied, measured, or detected force, F,is
not the same as the “real” or “intrinsic” friction force, F
0
, generated at the surfaces.
F and F
0
are coupled in a way that depends on the mechanical construction of the
system, for example, the axle of a car wheel that connects it to the engine. This
coupling can be modeled as an elastic spring of stiffness K and mass m.Thisisthe
simplest type of mechanical couplingand is also the same as in SFA- and AFM-type
experiments. More complicated real systems can be reduced to a system of springs
and dashpots, as described by Peachey et al. [351] and Luengo et al. [47].
We now consider four different models of stick–slip friction, where the me-
chanical couplings are assumed to be of the simple elastic spring type. The first
three mechanisms may be considered traditional or classical mechanisms or mod-
els [350], the fourth is essentially the same as the freezing–melting phase-transition
model described in Sect. 9.8.3.
Rough Surfaces or Surface Topology Model Rapid slips can occur whenever an
asperity on one surface goes over the top of an asperity on the other surface. The
extentof the slip will depend on asperity heightsand slopes, on the speed of sliding,
and on the elastic compliance of the surfaces and the moving stage. As in all cases
of stick–slip motion, the driving velocity v may be constant, but the resulting motion
at the surfaces v
0
will display large slips. This type of stick–slip has been described
by Rabinowicz [350]. It will not be of much concern here since it is essentially
a noise-type fluctuation, resulting from surface imperfections rather than from the
intrinsic interaction between two surfaces. Actually, at the atomic level, the regular
atomic-scale corrugations of surfaces can lead to periodic stick–slip motion of the
type shown here. This is what is sometimes measured by AFM tips [10,58,59,290,
339,340].
9 Surface Forces and Nanorheology of Molecularly Thin Films 487
Distance-Dependent or Creep Model Another theory of stick–slip, observed in
solid-on-solid sliding, is one that involves a characteristic distance, but also a char-
acteristic time, τ
s
, this being the characteristic time required for two asperities to
increase their adhesion strength after coming into contact. Originally proposed by
Rabinowicz [350,352],this model suggeststhat two rough macroscopicsurfaces ad-
here through their microscopicasperities of a characteristiclength. During shearing,
each surface must first creep this distance (the size of the contacting junctions) after
which the surfaces continue to slide, but with a lower (kinetic) friction force than
the original (static) value. The reason for the decrease in the friction force is that
even though, on average, new asperity junctions should form as rapidly as the old
ones break, the time-dependent adhesion and friction of the new ones will be lower
than the old ones.
The friction force, therefore, remains high during the creep stage of the slip.
However, once the surfaces have moved the characteristic distance, the friction
rapidly drops to the kinetic value. For any system where the kinetic friction is less
than the static force (or one that has a negative slope over some part of its curve
of F
0
versus v
0
) will exhibit regular stick–slip sliding motion for certain values of
K, m, and driving velocity, v.
This type of friction has been observed in a variety of dry (unlubricated) sys-
tems such as paper-on-paper [353, 354] and steel-on-steel [352, 355, 356]. This
model is also used extensively in geologic systems to analyze rock-on-rock slid-
ing [357,358]. While originally described for adhering macroscopic asperity junc-
tions, the distance-dependentmodel may also apply to molecularlysmooth surfaces.
For example, forpolymer lubricant films, the characteristiclength would now be the
chain–chain entanglement length, which could be much larger in a confined geo-
metry than in the bulk.
Velocity-Dependent Friction Model In contrast to the two friction models men-
tionedabove,which applymainly tounlubricated,solid-on-solidcontacts,the stick–
slip of surfaces with thin liquid films between them is better described by other
mechanisms. The velocity-dependentfriction model is the most studied mechanism
of stick–slip and, until recently, was considered to be the only cause of intrinsic
stick–slip. If a friction force decreases with increasing sliding velocity, as occurs
with boundary films exhibiting shear thinning, the force (F
s
) needed to initiate mo-
tion will be higher than the force (F
k
) needed to maintain motion.
A decreasing intrinsic friction force F
0
with sliding velocity v
0
results in the
sliding surface or stage moving in a periodic fashion, where during each cycle rapid
acceleration is followed by rapid deceleration. As long as the drive continues to
move at a fixed velocity v, the surfaces will continue to move in a periodic fashion
punctuated by abrupt stops and starts whose frequency and amplitude depend not
only on the function F
0
(v
0
),butalsoonthestiffness K and mass m of the moving
stage, and on the starting conditions at t = 0.
More precisely, the motion of the sliding surface or stage can be determined by
solving the following differential equation:
m¨x = (F
0
−F) = F
0
−(x
0
−x)K or m¨x+ (x
0
−x)K−F
0
= 0 ,
(9.47)
488 Marina Ruths and Jacob N. Israelachvili
where F
0
= F
0
(x
0
,v
0
,t) is the intrinsic or “real” friction force at the shearing sur-
faces, F is the force on the spring (the externally applied or measured force), and
(F
0
−F) is the force on the stage. To solve (9.47) fully, one must also know the
initial (starting) conditions at t = 0, and the driving or steady-state conditions at fi-
nite t. Commonly, the driving condition is: x = 0fort < 0andx = vt for t > 0,
where v = constant. In other systems, the appropriate driving condition may be
F = constant.
Various, mainly phenomenological, forms for F
0
= F
0
(x
0
,v
0
,t) have been pro-
posed to explain various kinds of stick–slip phenomena. These models generally
assume a particular functional form for the friction as a function of velocity only,
F
0
= F
0
(v
0
), and they may also contain a number of mechanically coupled elements
comprising the stage [359,360]. One version is a two-state model characterized by
two friction forces, F
s
and F
k
, which is a simplified version of the phase transitions
model described below. More complicated versions can have a rich F–v spectrum,
as proposed by Persson [361]. Unless the experimental data is very detailed and ex-
tensive, these models cannot generally distinguish between different types of mech-
anisms. Neither do they address the basic question of the origin of the friction force,
since this is assumed to begin with.
Experimental data has been used to calculate the friction force as a function of
velocity within an individual stick–slip cycle [363]. For a macroscopic granular ma-
terial confined between solid surfaces, the data shows a velocity-weakeningfriction
force during the first half of the slip. However, the data also shows a hysteresis loop
in the friction–velocity plot, with a different behavior in the deceleration half of the
slip phase. Similar results were observedfor a 1–2 nm liquid lubricant film between
mica surfaces [345]. These results indicate that a purely velocity-dependentfriction
law is insufficient to describe such systems, and an additional element such as the
state of the confined material must be considered.
Phase TransitionsModel In recent molecular dynamics computer simulationsit has
been found that thin interfacial films undergo first-order phase transitions between
solid-like and liquid-like states during sliding [255,364], as illustrated in Fig. 9.30.
It has been suggested that this is responsible for the observed stick–slip behavior of
simple isotropic liquids between two solid crystalline surfaces. With this interpreta-
tion, stick–slip is seen to arise because of the abruptchange in the flow properties of
a film at a transition [278,279,326], rather than the gradual or continuous change,
as occurs in the previous example. Other computer simulations indicate that it is the
stick–slip that induces a disorder (“shear melting”) in the film, not the other way
around [365].
An interpretation of the well-known phenomenon of decreasing coefficient of
friction with increasing sliding velocity has been proposed by Thompson and Rob-
bins [255] based on their computer simulation. This postulates that it is not the
friction that changes with sliding speed v, but rather the time various parts of the
system spend in the sticking and sliding modes. In other words, at any instant dur-
ing sliding, the friction at any local region is always F
s
or F
k
, corresponding to
the “static” or “kinetic” values. The measured frictional force, however, is the sum

9 Surface Forces and Nanorheology of Molecularly Thin Films 489
of all these discrete values averaged over the whole contact area. Since as v in-
creases each local region spends more time in the sliding regime (F
k
) and less in
the sticking regime (F
s
), the overall friction coefficient falls. One may note that this
interpretation reverses the traditional way that stick–slip has been explained. Rather
than invoking a decreasing friction with velocity to explain stick–slip, it is now the
more fundamental stick–slip phenomenon that is producing the apparent decrease
in the friction force with increasing sliding velocity. This approach has been studied
analytically by Carlson and Batista [366], with a comprehensive rate- and state-
dependent friction force law. This model includes an analytic description of the
freezing–melting transitions of a film, resulting in a friction force that is a function
of sliding velocity in a natural way. This model predicts a full range of stick–slip
behavior observed experimentally.
An example of the rate- and state-dependent model is observed when shearing
thin films of OMCTS between mica surfaces [367,368]. In this case, the static fric-
tion between the surfaces is dependent on the time that the surfaces are at rest with
respect to each other, while the intrinsic kinetic friction F
k,0
is relatively constant
over the range of velocities. At slow driving velocities, the system responds with
stick–slip sliding with the surfaces reaching maximum static friction before each
slip event, and the amplitude of the stick–slip, F
s
−F
k
, is relatively constant. As the
driving velocity increases, the static friction decreases as the time at relative rest
becomes shorter with respect to the characteristic time of the lubricant film. As the
static friction decreases with increasing drive velocity, it eventually equals the in-
trinsic kinetic friction F
k,0
, which defines the critical velocity v
c
, above which the
surfaces slide smoothly without the jerky stick–slip motion.
The above classifications of stick–slip are not exclusive, and molecular mecha-
nisms of real systems may exhibit aspects of different models simultaneously. They
do, however, provide a convenient classification of existing models and indicate
which experimental parameters should be varied to test the different models.
Critical Velocity for Stick–Slip For anygivensetof conditions,stick–slipdisappears
above some critical sliding velocity v
c
, above which the motion continues smoothly
in the liquid-like or kinetic state [261,285, 342,345, 362]. The critical velocity is
well described by two simple equations. Both are based on the phase transition
model,and bothinclude someparameter associated with the inertia ofthe measuring
instrument. The first equation is based on both experiments and simple theoretical
modeling [362]:
v
c
≈
(F
s
−F
k
)
5Kτ
0
, (9.48)
where τ
0
is the characteristic nucleation time or freezing time of the film. For ex-
ample, inserting the following typically measured values for a ∼1nm thick hexa-
decane film between mica: (F
s
−F
k
) ≈ 5 mN, spring constant K ≈ 500Nm
−1
,and
nucleation time [362] τ
0
≈ 5s, we obtain v
c
≈ 0.4µms
−1
, which is close to typically
measured values (Fig. 9.30b).

490 Marina Ruths and Jacob N. Israelachvili
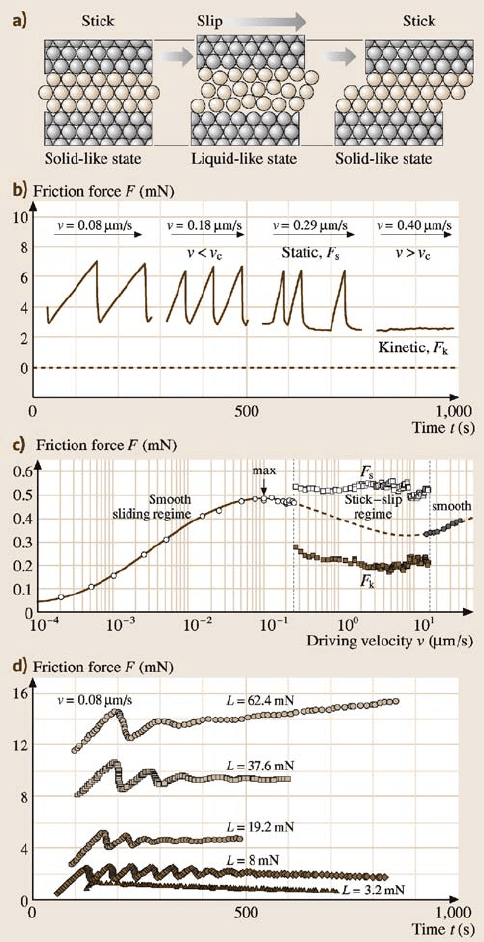
Fig. 9.30. (a) “Phase transitions” model of stick–slip where a thin liquid film alternately
freezes and melts as it shears, shown here for 22 spherical molecules confined between two
solid crystalline surfaces. In contrast to the velocity-dependent friction model, the intrinsic
friction force is assumed to change abruptly (at the transitions), rather than smooth or con-
tinuously. The resulting stick–slip is also different, for example, the peaks are sharper and
the stick–slip disappears above some critical velocity v
c
. Note that, while the slip displace-
ment is here shown to be only two lattice spacings, in most practical situations it is much
larger, and that freezing and melting transitions at surfaces or in thin films may not be the
same as freezing or melting transitions between the bulk solid and liquid phases. (b)Ex-
act reproduction of a chart-recorder trace of the friction force for hexadecane between two
untreated mica surfaces at increasing sliding velocity v, plotted as a function of time. In
general, with increasing sliding speed, the stick–slip spikes increase in frequency and de-
crease in magnitude. As the critical sliding velocity v
c
is approached, the spikes become
erratic, eventually disappearing altogether at v = v
c
. At higher sliding velocities the sliding
continues smoothly in the kinetic state. Such friction traces are fairly typical for simple liq-
uid lubricants and dry boundary lubricant systems (see Fig. 9.31a) and may be referred to
as the “conventional” type of static–kinetic friction (in contrast to panel (c)). Experimental
conditions: contact area A = 4×10
−9
m
2
,loadL = 10 mN, film thickness D = 0.4−0.8nm,
v = 0.08−0.4 µms
−1
, v
c
≈ 0.3 µms
−1
, atmosphere: dry N
2
gas, T = 18
◦
C. ((a)and(b)af-
ter [362] with permission; copyright 1993 American Chemical Society.) (c) Transition from
smooth sliding to “inverted” stick–slip and to a second smooth-sliding regime with increasing
driving velocity during shear of two adsorbed surfactant monolayers in aqueous solution at
aloadofL = 4.5mNandT = 20
◦
C. The smooth sliding (open circles) to inverted stick–slip
(squares) transition occurs at v
c
∼ 0.3 µm/s. Prior to the transition, the kinetic stress levels
off at after a logarithmic dependence on velocity. The quasi-smooth regime persists up to the
transition at v
c
. At high driving velocities (filled circles), a new transition to a smooth slid-
ing regime is observed between 14 and 17 µm/s (after [342] with permission). (d) Friction
response of a thin squalane (a branched hydrocarbon) film at different loads and a constant
sliding velocity v = 0.08 µms
−1
, slightly above the critical velocity for this system at low
loads. Initially, with increasing load, the stick–slip amplitude and the mean friction force de-
crease with sliding time or sliding distance. However, at high loads or pressures, the mean
friction force increases with time, and the stick–slip takes on a more symmetrical, sinusoidal
shape. At all loads investigated, the stick–slip component gradually decayed as the friction
proceeded towards smooth sliding (after [285] with permission; copyright 2003 American
Physical Society)
The second equation is based on computer simulations [364]:
v
c
≈ 0.1
F
s
σ
m
, (9.49)
where σ is a molecular dimension and m is the mass of the stage. Again, insert-
ing typical experimental values into this equation, viz., m ≈ 20 g, σ ≈ 0.5nm,and
(F
s
−F
k
) ≈ 5mN as before, we obtain v
c
≈ 0.3µms
−1
, which is also close to meas-
ured values.
9 Surface Forces and Nanorheology of Molecularly Thin Films 491
492 Marina Ruths and Jacob N. Israelachvili
Friction force F (mN)
3000
4
3
2
1
0
100 200
Time t (s)
100 Time t (s)500
1
0
a)
Friction force F (mN)
b)
Solid surfactant
v < v
c
v= 0.003 Pm/s
F
s
F
k
v= 0.1 Pm/s
v > v
c
v= 0.005 Pm/s
v= 0.0025 Pm/s
v= 0.001 Pm/s
Liquid surfactant
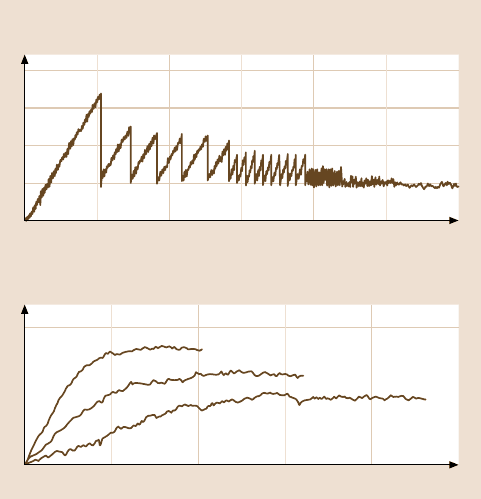
Fig. 9.31. (a) Exact reproduction of chart-recorder trace for the friction of closely packed
surfactant monolayers (L-α-dimirystoyl-phosphatidyl-ethanolamine, DMPE) on mica (dry
boundary friction) showing qualitatively similar behavior to that obtained with a liquid hex-
adecane film (Fig. 9.30b). In this case, L = 0, v
c
≈ 0.1 µms
−1
, atmosphere: dry N
2
gas,
T = 25
◦
C. (b) Sliding typical of liquid-like monolayers, here shown for calcium alkylben-
zene sulfonate in dry N
2
gas at T = 25
◦
CandL = 0 (after [261], with permission; copyright
1993 American Chemical Society)
Stick–slip also disappears above some critical temperature T
c
, which is not
the same as the melting temperature of the bulk fluid [285]. Certain correlations
have been found between v
c
and T
c
and between various other tribological pa-
rameters that appear to be consistent with the principle of time–temperature su-
perposition (see Sect. 9.8.3), similar to that occurring in viscoelastic polymer
fluids [346,369,370].
Recent work on the coupling between the mechanical resonances of the sliding
system and molecular-scale relaxations [295, 338,341, 371] has resulted in a bet-
ter understanding of a phenomenon previously noted in various engineering appli-
cations: the vibration of one of the sliding surfaces perpendicularly to the sliding
direction can lead to a significant reduction of the friction. At certain oscillation
amplitudes and a frequency higher than the molecular-scale relaxation frequency,
stick–slip friction can be eliminated and replaced by an ultralow kinetic-friction
state.
9 Surface Forces and Nanorheology of Molecularly Thin Films 493
9.9 Effects of Nanoscale Texture on Friction
The above scenario is already quite complicated, and yet this is the situation for
the simplest type of experimental system. The factors that appear to determine the
critical velocity v
c
depend on the type of liquid between the surfaces, as well as on
the surface lattice structure.
9.9.1 Role of the Shape of Confined Molecules
Small spherical molecules such as cyclohexane and OMCTS have been found to
have very high v
c
, which indicates that these molecules can rearrange relatively
quickly in thin films. Chain molecules and especially branched-chain molecules
have been found to have much lower v
c
, which is to be expected, and such liquids
tendto slide smoothlyor witherraticstick–slip [345],rather thanina stick–slip fash-
ion (see Table 9.5). With highly asymmetric molecules, such as multiply branched
isoparaffins and polymer melts, no regular spikes or stick–slip behavior occurs at
any speed, since these molecules can never order themselves sufficiently to solidify.
Table 9.5. Effect of molecular shape and short-range forces on tribological properties
a
Liquid Short-range
force
Type of
friction
Friction
coefficient
Bulk liquid
viscosity (cP)
Organic (water-free)
Cyclohexane Oscillatory Quantized
stick–slip
10.6
OMCTS
b
Oscillatory Quantized
stick–slip
12.3
Octane Oscillatory Quantized
stick–slip
1.50.5
Tetradecane Oscillatory
↔ smooth
stick–slip
↔ smooth
1.02.3
Octadecane (branched) Oscillatory
↔ smooth
stick–slip
↔ smooth
0.35.5
PDMS
b
(M = 3700 gmol
−1
, melt)
Oscillatory
↔ smooth
Smooth 0.450
PBD
b
(M = 3500 gmol
−1
, branched)
Smooth Smooth 0.03 800
Water
Water (KCl solution) Smooth Smooth 0.01−0.03 1.0
a
For molecularly thin liquid films between two shearing mica surfaces at 20
◦
C
b
OMCTS: Octamethylcyclotetrasiloxane, PDMS: Polydimethylsiloxane,
PBD: Polybutadiene