Barber J.R. Intermediate Mechanics of Materials
Подождите немного. Документ загружается.


2.1 Transformation of stresses 35
I
1
=
σ
1
+
σ
2
+
σ
3
(2.25)
I
2
=
σ
1
σ
2
+
σ
2
σ
3
+
σ
3
σ
1
(2.26)
I
3
=
σ
1
σ
2
σ
3
, (2.27)
which could also be deduced directly by noting that equation (2.16) must be capable
of factorization in the form
(
σ
−
σ
1
)(
σ
−
σ
2
)(
σ
−
σ
3
) = 0 . (2.28)
The importance of stress invariants stems from the fact that the failure of an
isotropic material cannot depend upon the orientation of the stress field and hence
must depend on a stress measure that is invariant under coordinate transformation.
This question is discussed in §2.2 below.
Cases where one principal direction is known
The largest stresses in engineering components almost always occur at the surface,
rather than at interior points. For example, in bending, the tensile stress is linearly
proportional to the distance from the neutral axis and hence the maximum stress
occurs at the greatest distance from this axis, which must necessarily be adjacent to
an exposed surface. Most exposed surfaces are traction-free, so if we choose a local
coordinate system such that the z-direction is the outward normal from the surface,
the components
σ
zx
=
σ
zy
=
σ
zz
= 0. In some cases, there may be a non-zero normal
traction at the surface (i.e.
σ
zz
6=0) due to contact with another body or pressure of a
gas, but it is really quite difficult to apply shear tractions to an exposed surface.
7
If the shear stresses
σ
zx
=
σ
zy
are zero at the point of interest, it follows imme-
diately that the z-direction is one of the principal directions and the other two must
therefore lie in the orthogonal x, y plane. These directions and the corresponding
principal stresses can then be found from the two-dimensional analysis of §2.1.1,
since, although there may now be non-zero tractions
σ
zz
on the triangular faces of
the three-dimensional element equivalent to Figure 2.1 (b), the corresponding forces
will not enter into the in-plane equilibrium equations (2.1, 2.2).
Thus, although there are strictly no two-dimensional problems (all bodies are
three-dimensional), most of the stress transformation questions that arise in design
reduce to an application of the two-dimensional equations of §2.1.1.
Three-dimensional Mohr’s circles
Once we have determined the three principal stresses
σ
1
,
σ
2
,
σ
3
, we can use a Mohr’s
circle to find the stress components on any plane that can be reached by rotating any
of the principal planes about one of the principal coordinate axes. Three such circles
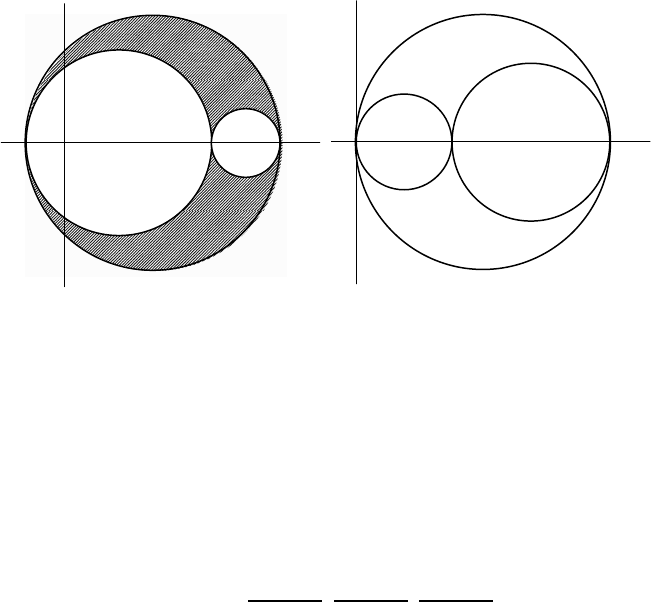
can be drawn, as shown in Figure 2.5 (a).
7
Tangential tractions may result from frictional contact or from viscous drag of a fluid, but
the resulting tractions are generally small compared with failure strengths for the material.
36 2 Material Behaviour and Failure
O
σ
1
σ
2
(a) (b)
Figure 2.5: Three dimensional Mohr’s circles: (a) the general case, (b) the case
where
σ
3
=0 and
σ
1
>
σ
2
>0.
Of course, there exist a whole range of planes that cannot be reached by such a
rotation, but it can be shown that the normal and shear stresses on all these planes
correspond to points in the area bounded by the three circles and shown shaded
in Figure 2.5 (a) (Boresi et al. (1993), pp.48–51). The maximum tensile stress is
therefore the largest of
σ
1
,
σ
2
,
σ
3
and the maximum shear stress is the largest of the
three radii — i.e.
σ
max
= max(
σ
1
,
σ
2
,
σ
3
) (2.29)
τ
max
= max
|
σ
1
−
σ
2
|
2
,
|
σ
2
−
σ
3
|
2
,
|
σ
3
−
σ
1
|
2
. (2.30)
It is important to realize that all real world problems are three-dimensional, even
if the three stress components
σ
zz
,
σ
yz
,
σ
zx
are zero (and hence one of the three prin-
cipal stresses is zero). Suppose we analyze a system and determine that both the
non-zero principal stresses
σ
1
,
σ
2
are tensile (positive) — for example
σ
1
>
σ
2
>0. A
na¨ıve analysis, neglecting the three-dimensionality of the problem would identify the
maximum shear stress as (
σ
1
−
σ
2
)/2, whereas it is clear from the three-dimensional
Mohr’s circles of Figure 2.5 (b) (using
σ
3
=0) that it is
σ
1
/2.
2.2 Failure theories for isotropic ma terials
If we take a block of material and machine a test specimen from it, the behaviour of
the specimen (e.g. the tensile strength or the elastic properties) might depend on the
orientation of the specimen relative to the original block. Such a material is referred
to as anisotropic — i.e. it does not have the same properties in all directions. A
simple example of anisotropy is a fibre-reinforced composite in which all the fibres
are parallel. In this case, a tensile specimen cut with the fibres along the test axis will
generally be stronger and stiffer than one cut across the fibre axis. Other sources of
anisotropy include the orientation of rows of atoms in a single crystal.
O
σ
1
σ
2
σ
3
2.2 Failure theories for isotropic materials 37
For most design calculations (with the important exception of fibre-reinforced
composites and wood), we make the simplifying assumption that the material is
isotropic, meaning that it has the same properties in all directions and hence that
all test specimens will have the same properties regardless of orientation. In many
cases, the material may be quite inhomogeneous and anisotropic on the microscopic
scale. For example, it may have a granular structure and each grain may have its
atoms aligned in different directions. Also there may be distributions of impurities,
microcracks and voids. However, if these irregularities are sufficiently small in size
and are randomly oriented and distributed, a larger specimen of the material will
appear isotropic.
Local failure of an isotropic material must depend only on measures of the sever-
ity of the local stress state without reference to direction, and hence must be capable
of description in terms of quantities that are invariant under coordinate transforma-
tion. These quantities include the set of three principal stresses
σ
1
,
σ
2
,
σ
3
or the three
stress invariants I
1
,I
2
,I
3
of equations (2.17–2.19). Any one of these sets can be deter-
mined from the other, so a comprehensive set of failure tests for an isotropic material
involves the variation of only three parameters.
2.2.1 The failure surface
Suppose we could devise a machine that is capable of applying arbitrarily chosen
values of the three principal stresses
σ
1
,
σ
2
,
σ
3
to a suitable test specimen of a given
material. Testing would involve varying one or more of the stresses until failure oc-
curs.
Failure under plane stress
Consider first the simple case of plane stress, where one of the three principal
stresses,
σ
3
is always zero. Possible stress states can then be presented as points
on a graph with coordinates (
σ
1
,
σ
2
) and loading scenarios will be directional lines
on this plot as shown in Figure 2.6.
O
σ
1
σ
2
1
A
2
A
2
C
1
C
2
B
1
B
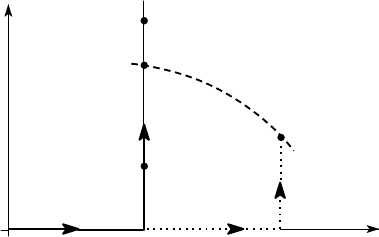
Figure 2.6: Plane stress loading scenarios leading to failure
38 2 Material Behaviour and Failure
For example, the line OA
1
B
1
describes a test in which all three stresses are origi-
nally zero;
σ
1
is then increased slowly until it reaches the value OA
1
, after which it is
held constant whilst
σ
2
is increased, until failure occurs at B
1
. A second test could be
performed using a similar scenario, but with a different value OA
2
for
σ
1
, in which
case the critical value of
σ
2
(A
2
B
2
) would also generally be different, as shown.
If we connect the failure points B
1
,B
2
etc. in Figure 2.6 by a line, this line will
define a boundary separating safe states of stress from unsafe states. Thus, the point
C
1
is safe because it is passed without failure during the test OA
1
B
1
, but the point C
2
is unsafe, because failure occurs at B
1
before C
2
is reached.
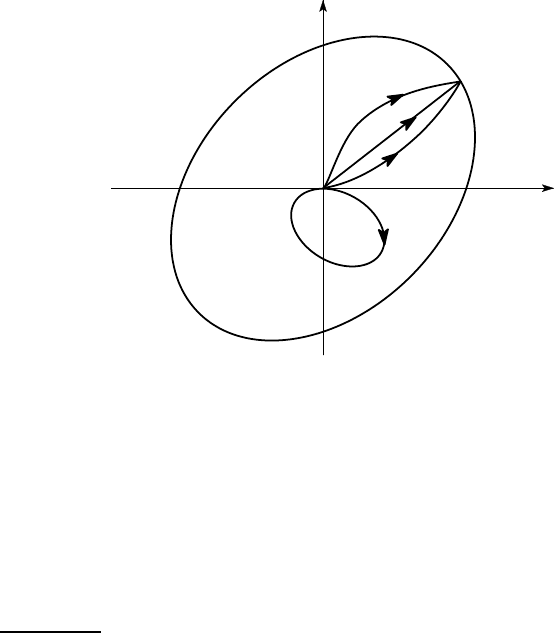
Failure can occur in compression as well as tension, so the complete failure en-
velope is likely to be a closed curve as shown in Figure 2.7. Everywhere inside the
curve, including the origin, where all three stresses are zero, is safe, but failure will
occur if we try to cross the failure envelope into the surrounding unsafe region.
O
σ
1
σ
2
1
2
3
4
safe
unsafe
B
Figure 2.7: Failure envelope for plane stress
It is important to recognize that this argument depends on the assumption that
failure is determined by the instantaneous state of stress and is not influenced by the
history of the loading before the failure point. For most materials, this is a reasonable
assumption if the deformation inside the failure envelope is elastic and the loading
scenario does not involve stress reversal — for example, failure will occur at the
point B in Figure 2.7 for any of the ‘monotonic’
8
loading scenarios 1,2,3. However,
scenario 4, involving a number of cycles of loading and unloading within the safe
region, is likely to lead to failure before the monotonic failure envelope is reached.
8
We shall refer to a loading scenario as monotonic if the none of the six stress rates
˙
σ
xx
,
˙
σ
yy
,
˙
σ
zz
,
˙
σ
xy
,
˙
σ
yz
,
˙
σ
zx
change sign during the process, where
˙
σ
≡
∂σ
/
∂
t and t is time.
2.2 Failure theories for isotropic materials 39
This process is known as fatigue and will be discussed in more detail in §2.3 be-
low. For the rest of this section, we shall restrict attention to failure under monotonic
loading.
The three-dimensional failure envelope
The ideas of the previous section are easily extended to the case where all three
principal stresses can be non-zero. For this purpose, we need to imagine a three-
dimensional graph in which
σ
1
,
σ
2
,
σ
3
define the three axes. Loading scenarios will
again correspond to lines in this three-dimensional space and failure points can be
joined to define a closed surface such that all points inside the surface correspond to
safe states of stress and all points outside the surface are unsafe.
2.2.2 The shape of the failure envelope
So far we have discussed ways of presenting data about the failure of materials under
general states of stress, but we have not given any indication of the form the failure
criterion is likely to take. In other words, what shape would we expect the failure
envelope to have? Many authors have proposed theories of how materials might be
expected to behave, but ultimately the question can only be answered by performing
appropriate experiments. Notice however that we can draw one further conclusion
from the isotropy of the material, which is that failure cannot depend on the order
of the three stresses
σ
1
,
σ
2
,
σ
3
. For example, if failure occurs at the point (a,b,c) it
must also occur at (b,a,c). It follows that the curve in Figure 2.7 must be symmetrical
about the 45
o
line
σ
1
=
σ
2
and additional symmetries of the same kind apply in the
three-dimensional envelope.
2.2.3 Ductile failure (yielding)
To proceed further, we need to consider separately the cases of ductile and brittle
materials, since they differ qualitatively in mechanism and behaviour.
Ductile materials suffer irreversible plastic deformation before fracture occurs.
Whether this constitutes failure depends on the specific design application, so to
avoid confusion, we shall refer to ductile failure as yielding and the corresponding
failure surface as the yield surface. Thus, if a component is loaded such that the
stress in some region passes outside the yield surface, it will not return to its original
state on unloading. A simplistic model of the distinction between elastic and plastic
deformation can be developed from atomic theory.
Consider first a sphere resting on an undulating surface as in Figure 2.8 (a). When
unloaded, the sphere will rest at the bottom of the groove. Application of a horizontal
force will cause the sphere to move as shown in Figure 2.8 (b), but if the force is re-
moved slowly, the sphere will return to the bottom of the groove. This is an analogue
of elastic deformation. However, if a sufficiently large force is applied, the sphere
will be pushed over into the next groove and it will remain there even if the force is
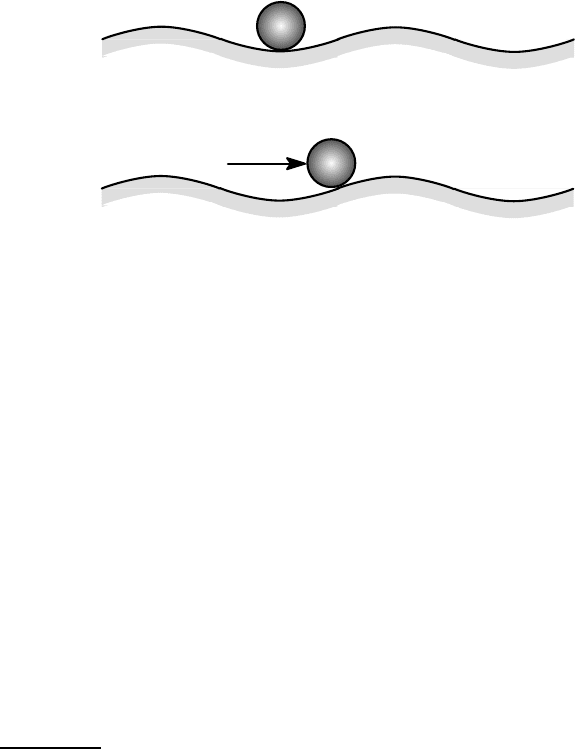
40 2 Material Behaviour and Failure
removed. Once the critical force is reached, the sphere could be pushed over many
grooves, producing much larger displacements than are possible in the elastic range.
Notice also that when the sphere is being pushed down into the next groove, the sys-
tem is unstable. We could remove the force at this point but the sphere would keep
moving and would be left oscillating under gravity about the equilibrium position in
the next groove.
F
(a)
(b)
Figure 2.8: The sphere and groove model — (a) unloaded equilibrium position, (b)
displacement due to a horizontal force
Now consider a piece of material as a large assembly of atoms or molecules held
together under the influence of interatomic forces. When there is no external load,
the assembly will adopt an equilibrium position.
9
Application of external forces will
cause the atoms to make small relative motions to a new equilibrium configuration.
However, sufficiently large forces might cause an atom or a block of atoms to jump
into a new configuration, analogously with the movement from one groove to the next
in Figure 2.8. In this case, removal of the load will not cause the system to return to
its original configuration and when the forces are removed, some of the atoms will
be left vibrating about their new equilibrium positions. The kinetic energy associated
with this vibration cannot be recovered through the external forces during unloading
and in fact has already been converted to heat.
10
Calculations of the force needed to move one block of atoms relative to another
grossly overestimate the theoretical yield stress in shear. In reality, crystal structures
are generally not geometrically perfect, but contain local defects known as dislo-
cations. Near the dislocations, the interatomic distances differ from the theoretical
value for a regular structure and a considerably smaller force is needed to make a
pivotal atom move to a new equilibrium position.
11
9
We shall argue in Chapter 3 that this can also be seen as a minimum energy configuration,
as it clearly is for the sphere at the bottom of the groove in Figure 2.8 (a).
10
Recall that the distinction between a hot body and a cold one is that the atoms or molecules
in the hot body are vibrating with larger amplitude about their mean position.
11
J.E. Gordon (1968), The New Science of Strong Materials, Princeton University Press,
Princeton NJ, pp.91–98.
2.2 Failure theories for isotropic materials 41
Change in volume
Elastic deformation usually involves a change in volume or dilatation. For example,
the increase in length of a bar in uniaxial tension will more than compensate for
the reduction in diameter due to Poisson’s ratio, leading to an increase in volume
except in the special case of a material for which
ν
= 0.5. In the atomic model, this
corresponds to a stretching of the interatomic bonds, so that the average interatomic
distance is increased.
If we load a body into the plastic range and then remove the load, the final shape
will differ from the original shape, but there is no reason to expect the volume of
the body to have changed, since the average interatomic distance is governed by
similar equilibrium arguments in both original and final states. This is confirmed
by experiments which show that plastic deformation does not generally cause any
change in volume.
12
p
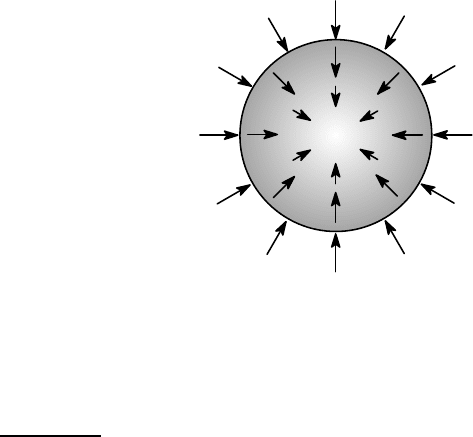
Figure 2.9: Sphere loaded by uniform compressive tractions
A corollary of this result is that stress states causing no change of shape cannot
result in plastic deformation regardless of their magnitude. Consider for example a
solid sphere of material loaded by a uniform external pressure p as shown in Figure
2.9. Because of symmetry, we would expect the sphere to remain spherical,
13
but to
12
It must be emphasised that this conclusion relates to a comparison of the volume before
loading and after unloading. Consider a uniaxial tensile test in which a specimen is loaded
into the plastic range and then unloaded. The unloading process is elastic and will involve
a reduction in volume. If the material yields at constant stress, the increase in volume
during the elastic phase of the loading process will be exactly equal to the decrease during
unloading and there will be no change in volume during the plastic phase of the process.
However, if the material work hardens (i.e. the yield stress increases with plastic strain), the
unloading process will occur over a larger stress range than the elastic phase of the loading
and will involve correspondingly more change in volume. The final volume will still be
equal to the initial volume and therefore some increase of volume is associated with work
hardening during the plastic phase of the process.
13
Strictly, we should allow the possibility that the body deviates from sphericity under the
load. However, it can be shown that the work done by the uniform applied tractions must be

42 2 Material Behaviour and Failure
get smaller under the influence of the pressure. Thus, there is no change in shape —
only a change in volume — and so no plastic deformation can be involved. In princi-
ple, we should be able to increase p as much as we like without causing yielding to
occur. Perhaps more surprising is that the same argument would apply if the tractions
were tensile instead of compressive — i.e. if we could exert a uniform tensile trac-
tion on the surface of the sphere. Engineers have been quite ingenious
14
in trying to
verify this conclusion by experiment. Such results as are obtained suggest that tensile
failure eventually occurs, but in an essentially brittle manner (i.e. by propagation of
microcracks) even for usually ductile materials.
Hydrostatic stress
If we argue from symmetry that the stresses in the sphere of Figure 2.9 depend only
on the distance R from the centre, equilibrium arguments can then be used to show
that the stress state everywhere is defined by
σ
1
=
σ
2
=
σ
3
=−p — i.e. the three prin-
cipal stresses are equal to the applied uniform tractions (remember that compressive
stresses are negative by definition). Referring back to Figure 2.5, we conclude that
the three Mohr’s circles will reduce to the single point
σ
=−p and that the maximum
shear stress will be zero. This latter conclusion can also be obtained from equation
(2.30).
The case where the three principal stresses are equal and there are no shear
stresses is referred to as a hydrostatic state of stress. The name arises because this is
the only stress state that can be sustained by a fluid at rest. Recall that the constitu-
tive law for a fluid relates the shear stress to the velocity gradient (for a Newtonian
fluid, these quantities are proportional and the constant of proportionality is defined
as the viscosity). If the fluid is at rest, the velocity and the velocity gradient are both
zero and hence there must be no shear stress. Notice also that when the three Mohr’s
circles condense to the point
σ
=−p, the normal stress on all planes must be equal to
−p. This constitutes a proof of the well-known result in hydrostatics that the pressure
at a point in a fluid at rest is equal in all directions.
It is no coincidence that an example chosen to exhibit no change of shape under
load involves no shear stress. Shear stress causes shear strain, which in turn is defined
in terms of the change in angles between faces of an element of material.
15
Changes
of angles necessarily involve change of shape, so the only states in which there is
no change in shape during deformation are those in which the stress is everywhere
hydrostatic.
zero under a constant volume plastic deformation. Since plasticity is a dissipative process,
it can only occur when the body deforms in such a way as to allow the external loads to do
work, so we can still conclude that plastic deformation is impossible in the sphere loaded
by a uniform pressure.
14
It is far from easy to apply a sufficiently large uniform tensile traction to the surface of
a body. Generally, the load application mechanism introduces areas of non-uniform stress
which serve as yield sites.
15
See §1.5.3 and Figure 1.6.

2.2 Failure theories for isotropic materials 43
The arguments of the preceding sections lead to the conclusion that yielding
should never occur under hydrostatic stress, regardless of its magnitude, and hence
that the complete straight line
σ
1
=
σ
2
=
σ
3
should lie within the safe region for the
three-dimensional yield envelope. The two most important yield theories used for
ductile materials both meet this condition.
Tresca’s maximum shear stress criterion
Since plastic deformation involves irreversible shear strain and cannot occur if there
are no shear stresses, an obvious hypothesis for yielding is that it will occur when
the maximum shear stress reaches a critical value
τ
Y
— i.e.
τ
max
≡ max
|
σ
1
−
σ
2
|
2
,
|
σ
2
−
σ
3
|
2
,
|
σ
3
−
σ
1
|
2
=
τ
Y
. (2.31)
The elastic region is then defined by the inequality
τ
max
<
τ
Y
. This is known as the
maximum shear stress theory or Tresca’s yield theory.
Tresca’s theory has one major advantage and one disadvantage. The governing
equation at the yield envelope is linear in the stresses and hence leads to linear equa-
tions which are algebraically easy to solve. However, the fact that
τ
max
is the largest
of three quantities can be inconvenient. Generally we shall know enough about the
probable stress state to know which Mohr’s circle will have the largest radius, but this
choice makes it necessary to think about the problem carefully rather than applying
the criterion mindlessly. This opens up the possibility of error and it also makes for
complication when the theory is used as part of a numerical algorithm.
Von Mises’ deviatoric strain energy criterion
An alternative theory due to von Mises states that yielding will occur when the strain
energy density associated with the shear stresses reaches a critical value. This con-
cept requires some preliminary discussion before the criterion can be formally enun-
ciated.
When an element of material is loaded elastically, the applied tractions do work
which is recovered on unloading. In the loaded state, it is natural to think of this
energy as being stored in the material as strain energy.
Consider an infinitesimal element of material of volume
δ
V =
δ
x
δ
y
δ
z, over
which the stresses
σ
xx
,
σ
yy
,
σ
zz
,
σ
yz
,
σ
zx
,
σ
xy
can be considered uniform. The stress
σ
xx
acts over a surface
δ
y
δ
z and hence corresponds to a force
F =
σ
xx
δ
y
δ
z .
The relative displacement of the two opposite faces experiencing this force is
δ
u
x
= e
xx
δ
x
and hence the contribution to the strain energy is
44 2 Material Behaviour and Failure
δ
U =
1
2
F
δ
u
x
=
1
2
σ
xx
e
xx
δ
x
δ
y
δ
z =
1
2
σ
xx
e
xx
δ
V .
Similar results are obtained for the other stress components and lead to the expression
δ
U =
δ
V
2
(
σ
xx
e
xx
+
σ
yy
e
yy
+
σ
zz
e
zz
+ 2
σ
yz
e
yz
+ 2
σ
zx
e
zx
+ 2
σ
xy
e
xy
)
for the strain energy contained in the volume
δ
V . The strain energy density U
0
is
defined as the strain energy per unit volume and is therefore
U
0
=
1
2
(
σ
xx
e
xx
+
σ
yy
e
yy
+
σ
zz
e
zz
+ 2
σ
yz
e
yz
+ 2
σ
zx
e
zx
+ 2
σ
xy
e
xy
) .
Hooke’s law [equations (1.7–1.9, 1.12)] can be used to express this result in terms
of stresses only in the form
U
0
=
1
2E
h
σ
2
xx
+
σ
2
yy
+
σ
2
zz
−2
ν
(
σ
xx
σ
yy
+
σ
yy
σ
zz
+
σ
zz
σ
xx
)
+ 2(1 +
ν
)
σ
2
yz
+
σ
2
zx
+
σ
2
xy
i
. (2.32)
If the Cartesian axes x,y,z are chosen to coincide with the principal directions, this
expression reduces to the simpler form
U
0
=
1
2E
h
(
σ
2
1
+
σ
2
2
+
σ
2
3
) −2
ν
(
σ
1
σ
2
+
σ
2
σ
3
+
σ
3
σ
1
)
i
. (2.33)
Early researchers argued that a material could only store a limited amount of
strain energy per unit volume before yield occurred, but this leads to a criterion that
conflicts with the conclusion that yield cannot occur under hydrostatic stress. This
difficulty can be overcome by decomposing the actual stress state into a hydrostatic
mean stress
¯
σ
and a deviatoric stress
ˆ
σ
, defined by
σ
=
¯
σ
+
ˆ
σ
, (2.34)
where
¯
σ
1
=
¯
σ
2
=
¯
σ
3
=
¯
σ
≡
σ
1
+
σ
2
+
σ
3
3
(2.35)
ˆ
σ
1
=
σ
1
−
¯
σ
=
2
σ
1
−
σ
2
−
σ
3
3
(2.36)
ˆ
σ
2
=
σ
2
−
¯
σ
=
2
σ
2
−
σ
3
−
σ
1
3
(2.37)
ˆ
σ
3
=
σ
3
−
¯
σ
=
2
σ
3
−
σ
1
−
σ
2
3
. (2.38)
Substituting these expressions into (2.33) and using the result
ˆ
σ
1
+
ˆ
σ
2
+
ˆ
σ
3
= 0
which can be verified by adding (2.36–2.38), we can write U
0
in the form
16
16
We cannot simply assume that the total strain energy density will be the sum of the values
obtained on substituting
¯
σ
and
ˆ
σ
respectively into equation (2.33), since the equation is