Barber J.R. Intermediate Mechanics of Materials
Подождите немного. Документ загружается.

1.5 Review of elementary mechanics of materials 15
in certain expressions. This difference disappears when the mathematical definition
of shear strain is used.
In this book, we shall generally use the double suffix mathematical definitions
e
xx
=
ε
x
=
∂
u
x
∂
x
; e
xy
=
1
2
γ
xy
=
1
2
∂
u
y
∂
x
+
∂
u
x
∂
y
. (1.6)
Notice that, as with stress, a repeated suffix indicates a normal strain and differing
suffices a shear strain. In other words, the diagonal elements of the strain matrix are
normal strains, whilst the off-diagonal elements are shear strains. It is clear from the
definition (1.6) that the strain matrix is symmetric — i.e. e
xy
=e
yx
.
1.5.4 Hooke’s law
Most engineering components are designed to operate in the elastic r´egime (i.e. to
return to the undeformed configuration on unloading) and deformations are generally
small. Even in components where the deflections are visible to the eye, such as a coil
spring, the strains are usually small compared with unity. Under these conditions,
most materials obey Hooke’s law — i.e. they exhibit a linear relation between stress
and strain. The most general linear relation would permit each strain component to be
a linear function of all six independent stress components
σ
xx
,
σ
yy
,
σ
zz
,
σ
xy
,
σ
yz
,
σ
zx
,
but if the material is isotropic (i.e. if it has no directional properties, so that a speci-
men cut with any orientation from a block of material will have the same properties),
it can be argued from symmetry considerations that normal stresses will produce
only normal strains and shear stresses only shear strains.
The constants of proportionality between stress and strain have to be determined
by experiment and the simplest experiment is the uniaxial tensile test leading to the
definitions of Young’s modulus E and Poisson’s ratio
ν
. In terms of these quantities,
we have
e
xx
=
σ
xx
E
−
νσ
yy
E
−
νσ
zz
E
, (1.7)
e
yy
=
σ
yy
E
−
νσ
zz
E
−
νσ
xx
E
, (1.8)
e
zz
=
σ
zz
E
−
νσ
xx
E
−
νσ
yy
E
. (1.9)
If there is only one normal stress
σ
xx
(i.e. if
σ
yy
=
σ
zz
=0), these relations predict
the occurrence of a corresponding normal strain e
xx
=
σ
xx
/E and transverse strains
e
yy
= e
zz
= −
νσ
xx
/E. The transverse strains are negative indicating that the cross
section of the tensile test specimen will get smaller as the specimen is stretched.
14
Equations (1.7–1.9) are essentially a superposition of the simultaneous effects of the
three orthogonal normal stresses
σ
xx
,
σ
yy
,
σ
zz
.
14
This conclusion depends upon
ν
being positive. There is no logical objection to negative
values of
ν
, but no practical materials are known which exhibit this behaviour.
16 1 Introduction
Shear stresses and shear strains are also linearly related through the equations
e
xy
=
σ
xy
2G
; e
yz
=
σ
yz
2G
; e
zx
=
σ
zx
2G
, (1.10)
where G is a new elastic constant known as the shear modulus or the modulus of
rigidity.
15
The shear modulus can be found experimentally by performing a simple
torsion test on a circular cylindrical specimen and using the elementary theory of tor-
sion to intepret the results. However, the three constants E,
ν
,G are not independent
of each other. To explain this we note that, even in a bar in uniaxial tension, shear
stresses and strains occur in coordinate systems inclined to the axis. These stresses
and strains can be found from the transformation equations and their ratio leads to
the relation
16
G =
E
2(1 +
ν
)
. (1.11)
To maintain consistency, it is therefore advantageous to rewrite relations (1.10)
in the form
e
xy
=
σ
xy
(1 +
ν
)
E
; e
yz
=
σ
yz
(1 +
ν
)
E
; e
zx
=
σ
zx
(1 +
ν
)
E
(1.12)
in applications where both tensile and shear stresses are involved.
Thermal expansion
If the temperature of a piece of isotropic material is increased uniformly by
∆
T , it ex-
pands in such a way that all the dimensions increase in the same proportion. In other
words, the deformed body looks like a photographic enlargement of the original. It
retains the same shape and hence no angles change, so there are no shear strains.
If we assume that the thermal expansion is linearly proportional to the temperature
change, we can define this effect in terms of a thermal strain
e
xx
= e
yy
= e
zz
=
α∆
T ; e
xy
= e
yz
= e
zx
= 0 , (1.13)
where
α
is a material constant known as the coefficient of thermal expansion.
Strains due to thermal expansion can be superposed on those due to stresses
[equations (1.7–1.9)], so that
e
xx
=
σ
xx
E
−
νσ
yy
E
−
νσ
zz
E
+
α∆
T , (1.14)
e
yy
=
σ
yy
E
−
νσ
zz
E
−
νσ
xx
E
+
α∆
T , (1.15)
e
zz
=
σ
zz
E
−
νσ
xx
E
−
νσ
yy
E
+
α∆
T , (1.16)
whilst (1.10, 1.12) remain unchanged.
15
Notice that the definition of the mathematical shear strain introduces a factor of 2 into these
relations.
16
See, for example, E.P. Popov and T.A. Balan (1999), Engineering Mechanics of Solids,
Prentice Hall, Upper Saddle River, NJ, 2nd edn., §5.7.
1.5 Review of elementary mechanics of materials 17
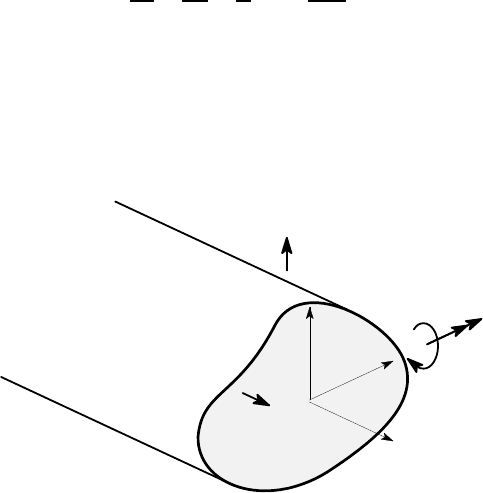
1.5.5 Bending of beams
In defining the equation for the elementary bending theory, we choose a coordinate
system such that the z-axis passes through the centroid of the beam cross section, as
shown in Figure 1.7. If a moment M
x
is applied about the x-axis, the neutral plane
(where the bending stress is zero) will be defined by y = 0 and the resulting stress
and deformation is defined by the equation
M
x
I
x
=
σ
zz
y
=
E
R
= −E
d
2
u
y
dz
2
, (1.17)
where I
x
is the second moment of area of the beam cross section about the x-axis, R
is the radius of curvature of the initially straight beam due to bending and u
y
is the
beam deflection. Notice that following §§1.5.1, 1.5.3, the bending stress is denoted
by
σ
zz
because it acts in the z-direction on planes z= constant and the beam deflection
by u
y
, since it constitutes a displacement of the particles of the beam in the positive
y-direction.
x
y
z
M
x
σ
zz
y
u
Figure 1.7: Coordinate system for elementary bending
If a bending problem is determinate (i.e. if the support reactions can be deter-
mined from equilibrium considerations alone), the bending moment for a given load-
ing can be found as a function of z and substitution into (1.17) leads to a second order
ordinary differential equation for u
y
. The solution of this equation is easily obtained
and contains two arbitrary constants which are determined by imposing two kine-
matic boundary conditions derived from the way in which the beam is supported.
Indeterminate problems, in which there are more supports than are needed to pre-
vent motion, are most conveniently treated by using the inverse method described in
§1.4.2. Suppose there are N unknown support reactions, R
1
,R
2
,..., R
N
. Since there
are only 2 equilibrium equations for two-dimensional beam problems, the problem
is statically indeterminate if N > 2. We invert the problem by ‘replacing’ N−2 of the
reactions by external forces which we treat as given. It helps here to use a different
symbol for these forces — for example, we can leave R
1
,R
2
as reactions and write the

18 1 Introduction
remaining reactions as the external forces S
3
,S
4
,..., S
N
. Now solve this new equiva-
lent determinate problem. Notice that since it is determinate, we can see this phase
of the process as the use of a procedure for the solution of determinate problems,
which we denote by P
D
, and gain the advantages listed in §1.4.1. The output from
P
D
will be an expression for the displacement u
y
of the beam which will contain
the unknown forces S
3
,S
4
,..., S
N
and two arbitrary constants of integration — i.e. N
unknowns in all. Since there are N reactions, there must be N kinematic conditions
at the supports, which will provide N equations for the N unknowns.
This strategy can also be applied to other indeterminate problems, such as those
involving trusses or curved beams. We shall give examples in §3.10.5 where a new
energy-based method is used for the determinate procedure P
D
.
1.5.6 Torsion of circular bars
The elementary theory of torsion leads to the formula
T
J
=
τ
r
= G
φ
, (1.18)
where T is the applied torque, J is the polar second moment for the cross section,
τ
is the shear stress,
17
r is the radial distance from the axis of the bar and
φ
is
the twist per unit length. This theory is only applicable to solid or hollow circular
cylinders and can give very large errors if it is used for bars of non-axisymmetric
cross section. The torsion problem for more general cross sections is considerably
more challenging than the corresponding bending problem. The important case of
thin-walled sections, such as I-beams and box sections is discussed in Chapter 6.
1.6 Summary
In this chapter, we have discussed the rˆole of calculations in the engineering design
process and introduced some ideas and definitions from elementary mechanics of
materials. During the early stages of an engineering design, many competing con-
cepts may be under review and only a limited time is available to judge their feasi-
bility. The effective designer needs to posess insight into the qualitative behaviour
of elastic systems and make extensive use of simple approximate techniques that
provide estimates for the stresses and displacements with the absolute minimum of
calculation. More time consuming rigorous analytical and numerical methods are
appropriate at a later stage in the design process, when the geometry and loading are
largely defined.
This theme will recur throughout the remaining chapters of this book. Emphasis
will be placed on qualitative aspects of the behaviour revealed by the analytical meth-
ods discussed. Simple approximate techniques will be introduced wherever possible
17
Notice that the shear stress
τ
acts in the circumferential direction on the cross-sectional
plane z = constant. It would therefore be denoted by
σ
z
θ
in the double suffix notation in
cylindrical polar coordinates (r,
θ
,z).
Problems 19
and their predictions compared with more exact treatments. Each chapter concludes
with a summary in which the important messages for engineering design are empha-
sised.
Further reading
The design process
D.G. Ullman (1992), The Mechanical Design Process, McGraw-Hill. New York.
Elementary mechanics of materials
F.P. Beer and E.R. Johnston (1992), Mechanics of Materials,McGraw-Hill, New
York, 2nd edn.
J.M. Gere and S.P. Timoshenko (1997), Mechanics of Materials, PWS Publishing
Co., Boston, 4th edn.
R.C. Hibbeler (1997), Mechanics of Materials, Prentice Hall, Upper Saddle River,
NJ, 3rd edn.
T.J. Lardner and R.R. Archer (1994), Mechanics of Solids: An Introduction, McGraw-
Hill, New York.
E.P. Popov and T.A. Balan (1998), Engineering Mechanics of Solids, Prentice Hall,
Upper Saddle River, NJ, 2nd edn.
W.F. Riley and L.W. Zachary (1989), Introduction to Mechanics of Materials, John
Wiley, New York.
Problems
Section 1.1
1.1 You are project manager for the gearbox for a manual transmission car expected
to sell a total of 200,000 units over a five year life. The gearbox comprises a two-part
housing, four shafts, 14 gears, two couplings, eight bearings, a shift mechanism and
assorted smaller items and is estimated as constituting about $500 of the estimated
retail vehicle price of $18,000.
You have a bright young University of Michigan graduate on your staff who
has an idea for a redesign of the input shaft that he claims will save 30% of the
manufacturing costs for that component. He asks you for two weeks full time to
evaluate it analytically. You think his chance of success is 50%. His annual salary is
$50,000 and carries 30% fringe benefit and 70% infrastructure overhead.
Make a few rough calculations to see whether you think you should approve his
request.
20 1 Introduction
1.2. A manufacturer of specialized test equipment sells a machine for testing automo-
tive friction materials at $150,000. They are approached by a customer who needs
a custom-made machine to operate at twice the maximum operating speed of the
normal production model. From informal discussions, it appears that the customer
might be willing to pay up to $250,000, but the specialized nature of the operating
conditions makes it unlikely that more than one or two such machines would ever be
sold.
The design challenges of meeting the specification are significant. You have a few
ideas, such as using two counter-rotating systems to achieve the required relative
speed, or improving the level of machining and balancing to permit higher speed
operation. However, you do not know yet whether these ideas are even feasible, let
alone whether you can meet the specification within a realistic price range.
How many hours design work at $180 per hour would you do before deciding
whether to quote at all. Assuming the results of this work appear promising, how
many hours can be committed to developing the quote (which would then commit
the company to supplying a machine to the stated specification at the quoted price)?
1.3. A well-known manufacturer of lawnmower engines is developing a new gener-
ation of quieter engines which it is hoped will be capable of being manufactured for
about the same price as the present standard, which retails for $100. The manufac-
turer presently has 20% market share in the US and hopes to increase this to 25%
as a result of the improved design. Assume that stress and failure analysis amounts
to 5% of the expected design costs and that there are eight significantly stressed
components in a typical engine (block, crankcase, piston, connecting rod, crankshaft
etc.) each of which will require about $20,000 in finite element analysis and inter-
pretation of results to provide confidence that the design is adequate against fracture.
Perceived reliability is a major factor in consumer choice so this level of design
rigour is deemed necessary if the new engine is to be introduced.
Make some elementary estimates based on plausible assumptions to decide
whether (in the area of stress analysis at least) the project is financially viable.
Section 1.2
Instructors are encouraged to use some of the problems in this section as the basis
for a classroom discussion. Ask for a few alternative answers from the class and then
take a vote on the results. In some cases, a simple experiment can be performed as
well.
No bending calculations are to be performed in answering problems 1.4–1.8.
1.4. A 1.5 m wooden beam of 25 mm square cross section is built-in at one end. If
you put all your weight on the other end of the beam will it break? What is the longest
beam of this cross section that would be strong enough to support your weight?
Problems 21
1.5. A 2 ft steel bar of 1/4 inch diameter is built-in at one end. What lateral load at
the other end would be just sufficient to cause permanent deformation of the bar?
1.6. A wooden plank is 200 mm wide, 25 mm thick and 1.5 m long. It is simply
supported at the two ends. How far will it deflect if you stand on it at the centre?
1.7. A cylindrical log of diameter 12 inches and length 10 feet is floating in water so
that the highest point on the cylinder is 2 inches above the water level. If you stand
on the log, will you get your feet wet (i) if you stand at the mid point, or (ii) if you
stand at one end?
1.8. We wish to support a textbook weighing 2.5 kg by two strips of paper, one
attached to each cover by adhesive tape. What is the minimum width of the strips if
they are not to fail in tension?
1.9. What is the maximum tensile force you can apply to a strip of paper by gripping
one end in each hand and pulling?
1.10. Check your answer to Problem 1.8 by (i) testing strips of various widths until
you determine the maximum width of strip that you can break and then comparing
the answer with that from Problem 1.8. Be careful not to fail the strips in a tearing
mode where you attach them to the book or grip them.
1.11. Estimate the maximum bending moment you can apply to a one inch diameter
broom handle using only your hands. (Suppose the broom is lying on the ground and
you want to pick it up with one hand from the end of the handle, keeping the handle
horizontal all the time. Would you be able to do so and if so, how much weight at the
other (broom) end could be added before the moment required from your grip would
be too large?)
1.12. Find a way to support a 5 lb textbook 8 inches above a flat surface using a
structure made only of one sheet of paper (it can be cut into several pieces if desired)
and 2 inches of adhesive tape. Learn from your failures as well as your success.
1.13. What is the maximum twisting moment that you can apply by hand to the
broom handle of Problem 1.11?
1.14. Estimate the coefficient of friction between steel and rubber by placing an
eraser on a steel plane surface (e.g. the bottom of a biscuit tin) and tilting it until
slip occurs. [This is just as good an estimate as you will find in (for example) an
Engineer’s Handbook, which would be the usual source of information chosen by an
engineering student.]
22 1 Introduction
1.15. Repeat problem 1.14 with a range of different materials.
1.16. Roughly how far does the rear end of your car descend when you fill the tank
with gas? Use this result to estimate the stiffness of the car rear springs in N/mm.
1.17. A tree is 60 feet high and the trunk is 2 feet in diameter at the base. Estimate
the total weight of wood in the tree.
1.18. A rubber bushing consists of an annulus of rubber, 60 mm outside diameter,
25 mm inside diameter and 25 mm thick. The outside diameter is perfectly bonded
to a rigid support and a 25 mm diameter rigid bar is perfectly bonded to the inner
diameter. The bar projects 300 mm axially from the bushing.
(i) How much axial deflection would be produced by a 10 N axial force applied to
the bar?
(ii) If a 10 N lateral force is applied to the end of the bar, through what angle will
the bar rotate away from the axis?
(iii) If you apply the largest twisting moment to the bar that you can using the grip
of one hand, how much axial rotation of the bar will occur?
1.19. A steel beam is of L-shaped cross section, each leg of the L being of length 1
inch and thickness 1/16 inch. It is 2 feet long. If you grip it with one hand at each
end and try to twist it (i.e. load it in torsion), how much relative rotation (in degrees)
between the ends will you be able to produce?
Now answer the same question for a beam consisting of a hollow tube of 1 inch
diameter and 1/16 inch wall thickness.
Try these experiments in your local hardware store. L-shaped beams (angle irons)
are sold for the construction of (e.g.) shelving units. Comment on the results and
speculate on possible explanations for the difference between the behaviour of the
two sections.
1.20. Repeat Problem 1.19 (comparing an angle iron and a circular tube) in bending
instead of torsion. Which is the stiffer and by how much? Bending stiffness should
be judged by the relative rotation between the two ends under a given moment.
1.21. Construct a thin-walled paper tube by rolling up a piece of paper into a cylinder
(say 50 mm diameter) and taping it up along the side.
Pinch the tube between your fingers at one end. What happens to the initially
circular cross section of the tube at the other end? Can you find a simple explanation
of this result?
Try the same experiment on a cardboard tube such as the centre from a roll of
toilet paper. Does it behave differently and if so, what is different here?
Problems 23
1.22. What is the maximum compressive force that can be transmitted by a rolled
up paper tube of diameter 0.5 in, length 8 in and one layer of paper wall thickness?
Guess first and then make a tube as in Problem 1.21 and test it. You can use books of
various sizes as weights.
1.23. An initially straight piece of steel wire of diameter 1 mm is wrapped around
a rigid drum of diameter 100 mm. The wire is then released. Will it return to the
straight shape or will it be permanently deformed? If it is deformed, what radius
would you expect it to have after being released?
Section 1.3
1.24. An office building is five stories high. Which of the following kinds of loading
is likely to be most significant and by roughly what ratios:-
(i) self weight of the building structure,
(ii) wind load during a severe storm,
(iii) loading due to furniture and employees.
Would the relative magnitude of the first two effects be different if the building were
50 stories high?
1.25. A steam boiler is 5 feet in diameter, 20 feet long and has a wall thickness of 1
inch. It experiences
(i) an internal pressure of 250 psi,
(ii) weight of contained water (during normal service it is half full of water),
(iii) a temperature difference between the outside and the inside wall in the heated
area of 100
o
F,
(iv) bending stresses due to self weight, if the boiler is supported on conforming
structures at each end over a rectangular area 2 ft square.
Which of these effects must be taken into account in the design of the boiler?
1.26. What determines the minimum wall thickness usable for an aluminium bever-
age can:-
(i) resistance to damage during shipping,
(ii) retention of shape when standing on a surface,
(iii) possible failure due to internal pressure of fermented beverages,
(iv) tearing during the manufacturing process,
(v) thermal stresses during refrigeration.
24 1 Introduction
1.27. One of the shafts in an automotive gearbox is 200 mm long and it carries
two gears, one of 50 mm diameter and one of 100 mm diameter. Which two of the
following factors are most likely to determine the minimum diameter that can be
used for the shaft:-
(i) bending stresses in the shaft due to gear tooth forces,
(ii) torsional stresses in the shaft due to gear tooth forces,
(iii) shaft deflection affecting gear meshing action,
(iv) internal diameter needed to accommodate adequate roller bearings,
(v) natural frequency of shaft vibrations.
1.28. Which two of the following factors are most likely to be important in determin-
ing the maximum stresses in an automotive cylinder block:-
(i) gas pressure in the cylinders during the power stroke,
(ii) fluid pressure in the coolant passages,
(iii) self weight of the block,
(iv) thermal stresses due to temperature variation during warm-up,
(v) thermal stresses due to temperature gradients during normal operation,
(vi) normal forces between piston rings and cylinder walls,
(vii) frictional forces between piston rings and cylinder walls,
(viii) localized loading at the bolts which attach the cylinder head.