Анищенко В.С. Нелинейные эффекты в хаотических и стохастических системах
Подождите немного. Документ загружается.

x(t) = A cos(ωt)
y(t) = A sin(ωt)
Φ = ωt
x x → y y =
−˙x sgn(ω)/ω
y x +π/2 ω < 0 −π/2
y(t)
x(t)
y(t) =
Z
∞
−∞
K(t − τ )x(τ )dτ.
K
x(t)
x(t) K(t − τ)
y(t)
y
ω
= K
ω
x
ω
.
x
ω
±i
K
ω
= −i sgn(ω)
sgn(0) = 0
K(t) =
1
πt
.
K
y(t)
y(t) = H[x] =
1
π
Z
∞
−infty
x(τ)
t − τ
dτ =
1
π
Z
∞
0
x(t −τ) − x(t + τ)
τ
dτ.
H[x]
x
2
(t)
x(t)
(x
1
, x
2
)
x
1
(t) = A(t) cos Φ(t),
x
2
(t) = A(t) sin Φ(t).
Φ(t) A(t)
y(t) x
2
(t)
ω
hωi
t
k
τ(t) = t
k+1
− t
k
t
k
< t < t
k+1
x(t)
Φ(t)
lin
= π
t −t
k
t
k+1
− t
k
+ π k, t
k
< t < t
k+1
,
hωi = lim
T →∞
1
T
πM(T ) ,
M(T ) T
Φ(t)
discr
= πk(t) = π
X
k
θ(t − t
k
),
k(t) t
k
θ(x)
hωi = π
D
X
k
δ( t
k
− t )
E
.
x(t) = exp[i Φ(t)
discr
].
+1 −1
Φ(t)
t
k
x(t) k
−1 → +1
y(t) =
1
π
X
k
(−1)
k
ln
t − t
k
t − t
k−1
=
2
π
X
k
ln
t − t
2k
t − t
2k+1
.
t < t
k
x(t) = −1 y(t)
−∞ t = t
k
x
+1 y(t)
+∞ t = t
k+1
x y
x = −1
Φ(t)
Hilbert
= πk(t) + arctan
y(t)
x(t)
,
y(t)
Φ
Hilbert
lim
t→∞
|nΦ
1
(t) − mΦ
2
(t)| < const.
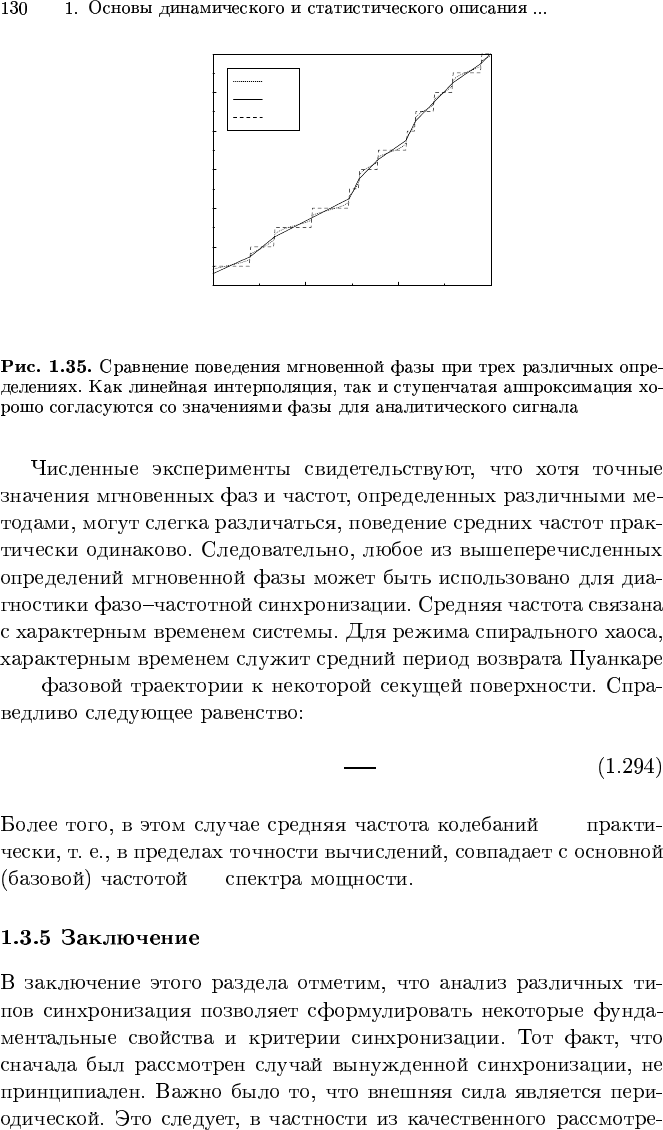
−30 −10 10 30
t
0
2
4
6
8
10
Φ
Φ
Hilbert
Φ
linear
Φ
discrete
hT i
hT i =
2π
hωi
.
hωi
ω
0
theta =
ω
1
/ω
2
=
˙ϕ = 0, ϕ
st
= const.
•
P
st
(ϕ)
•
•
D
eff
6 2 π
ω
1
n
,
n 1