Alciatore D.G., Histand M.B. Introduction to Mechatronics and Measurement Systems
Подождите немного. Документ загружается.

Confirming Pages
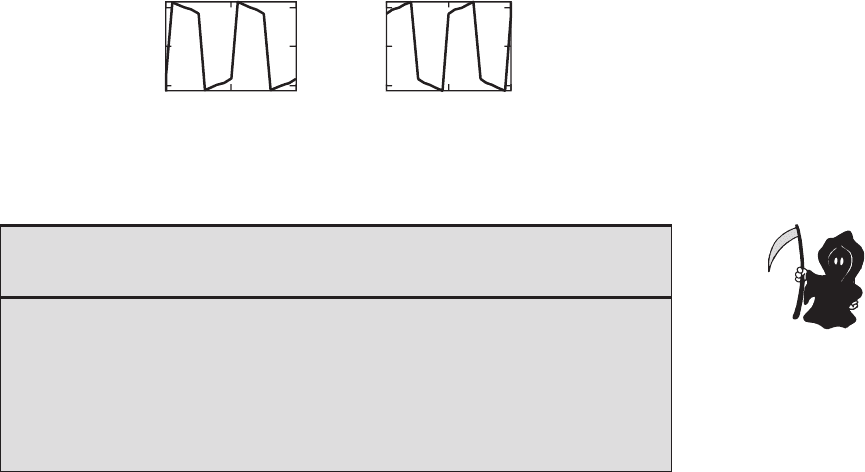
Figure 4.10 Phase distortion o f a square wave (generated with MathCAD).
t := 0, 0.01 . . 2 n := 1 . . 50
B
n
:=
4
π 2n 1–()
-----------------------
dt
n
:= 0.05 1 exp 2n 1–()–[]–{}
F
lag
t() := B
n
2n 1–()2π tdt
n
–()[]sin
n
∑
F
lead
t() := B
n
2n 1–()2π tdt
n
+()[]sin
n
∑
0 1 2
0
1
F
lag
(t)
t
0 1 2
0
1
_
1
_
1
F
lead
(t)
t
(a) high-frequency components lagging (b) high-frequency components leading
4.7 Dynamic Characteristics of Systems 131
4.7 DYNAMIC CHARACTERISTICS
OF SYSTEMS
As we will see, many measurement systems can be modeled as linear ordinary dif-
ferential equations with constant coefficients. This is also true of many mechatronic
systems or their component subsystems. These linear models have the following
general form:
A
n
n = 0
N
∑
d
n
X
out
dt
n
---------------
B
m
m = 0
M
∑
d
m
X
in
dt
m
--------------
=
(4.30)
where X
out
is t he output variable, X
in
is the input variable, and A
n
and B
n
are constant
coefficients. N defines the order of the system independent of M. The approach used
to determine the differential equation model depends on the type of system being
analyzed. For example, Newton’s laws and free-body diagrams can be applied to
mechanical systems, and KVL and KCL equations can be applied to electric circuits.
■ CLASS DISCUSSION ITEM 4.3
Analytical Attenuation
In Figure 4.9, the following exponential terms were used to attenuate amplitude
components at either low or high frequencies:
e
−0.1(2n − 1)
and 1e
−(2n − 1)
Explain how these exponential terms cause the resulting distortion of the square wave.
(Hint: Plot the exponential functions and describe how they change the amplitudes of
the components of the square wave spectrum.)
alc80237_ch04_117-160.indd 131alc80237_ch04_117-160.indd 131 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
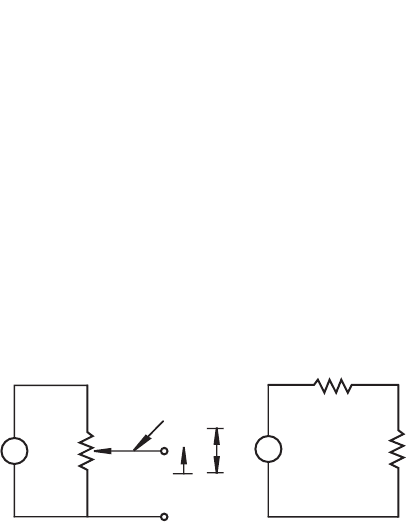
Figure 4.11 Displacement potentio meter.
wiper
R
p
V
out
L
R
L – x
= R
p
– R
x
R
x
= (X
in
/L)R
p
+
+
–
potentiometer
equivalent circuit
V
ou
t
+
–
+
X
in
V
s
V
s
R
L – x
R
x
132 CHAPTER 4 System Response
As we will see, the constant coefficients A
n
represent physical properties of the sys-
tem of interest.
Many electromechanical systems exhibit nonlinear behavior and cannot be accu-
rately modeled as linear systems. However, a nonlinear system may often exhibit
linear behavior over a limited range of inputs and a linear model can be derived that
provides an adequate approximation over this range. This process of modeling a
nonlinear system with a linear model is called linearization.
The next three sections present methods to characterize the simplest and most
common forms of Equation 4.30, where M = 0 and N = 0, 1, or 2. These cases are
referred to as zero-order, first-order, and second-order systems, respectively.
4.8 ZERO-ORDER SYSTEM
W hen N = M = 0 in Equation 4.30, the model represents a zero-order system whose
behavior is described by
A
0
X
out
B
0
X
in
=
(4.31)
or
X
out
B
0
A
0
-----
X
in
KX
in
==
(4.32)
where K = B
0
/A
0
is a constant referred to as the gain or sensitivity of the system,
because it represents a scaling between the input and the output. When the sensitivity
is high, a small change in the input can result in a significant change in the output.
Note that the output of a zero-order system follows the input exactly with no time
delay or distortion.
An example of a zero-order measurement system is a potentiometer used to
measure displacement. A potentiometer is a variable resistance device whose output
resistance changes as an internal wiper moves across a resistive surface. As illus-
trated in Figure 4.11, it produces an output voltage V
out
that is directly proportional to
the wiper displacement X
in
. This is a result of the voltage division rule, which gives
V
out
R
x
R
p
-----
V
s
V
s
L
-----
⎝⎠
⎛⎞
X
in
==
(4.33)
alc80237_ch04_117-160.indd 132alc80237_ch04_117-160.indd 132 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
4.8 Zero-Order System 133
where R
x
is the re sistance between the potentiometer leads, R
p
is the maximum resis-
tance of the potentiometer, X
in
is the displacement of the potentiometer wiper, and L
is the maximum amount of wiper travel.
■ CLASS DISCUSSION ITEM 4.4
Assumptions for a Zero-Order Potentiometer
What approximating assumptions must be made regarding the potentiometer to
ensure that it is a zero-order measurement system?
THREADED DESIGN EXAMPLE
DC motor power-op-amp speed controller—potentiometer interface A.2
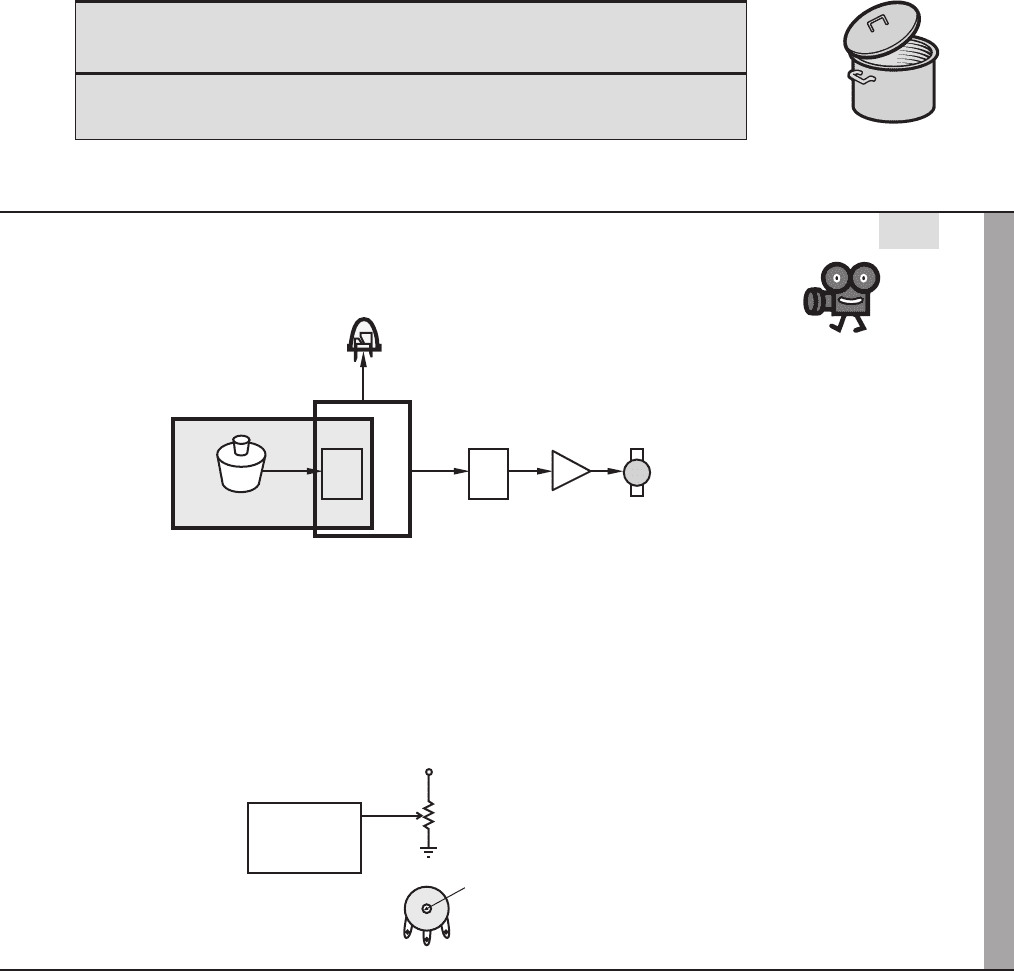
The figure below shows the functional diagram for Threaded Design Example A (see Section
1.3 and Video Demo 1.6). The portion described here is highlighted.
potentiometer
PIC microcontroller
with analog-to-digital
converter
power
amp
DC
motor
A/D D/A
light-
emitting
diode
digital-to-analog
converter
To interface a potentiometer to a microcontroller, the analog voltage output (see Equation
4.30) must be converted to digital form. Fortunately, a PIC microcontroller can be selected that has
a built-in analog-to-digital (A/D) converter. This allows the PIC to sense the potentiometer posi-
tion, as a voltage, using the simple circuit shown below. The potentiometer has three leads, wired
as shown, with the center “wiper” lead connected to the PIC analog input (pin 18, designated as
AN1). The voltage on the wiper line varies from 0 V (ground) to 5 V as the knob is turned.
PIC16F88
microcontroller
AN1
18
5 V
wiper
5 V
wiper
ground
potentiometer
schematic symbol
actual
potentiometer
layout
knob
10 kΩ
pot
Video Demo
1.6DC motor
power-op-amp
speed controller
alc80237_ch04_117-160.indd 133alc80237_ch04_117-160.indd 133 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
134 CHAPTER 4 System Response
4.9 FIRST-ORDER SYSTEM
Whe n N = 1 and M = 0 in Equation 4.30, the equation models a first-order system
whose behavior is described by
A
1
d
X
out
dt
------------
A
0
X
out
+ B
0
X
in
=
(4.34)
or
A
1
A
0
-----
dX
out
dt
------------
X
out
+
B
0
A
0
-----
X
in
=
(4.35)
As with the zero-order system, the coefficient ratio on the right-hand side is called
the sensitivity or static sensitivity, defined as
K
B
0
A
0
-----
=
(4.36)
The coefficient ratio on the left side of Equation 4.35 has a special name and meaning.
It is called the time constant and is defined as
τ
A
1
A
0
-----
=
(4.37)
Why we chose this name will become clear in the subsequent analysis. With these
definitions, the first-order system equation can be written as
τ
d
X
out
dt
------------
X
out
+ KX
in
=
(4.38)
Note that in this standard form, the coefficent of the X
out
term must be 1.
To characterize how a sys tem responds to various types of inputs, we apply
standard inputs to the model, including step, impulse, and sinusoidal functions. A
step input changes instantaneously from 0 to a constant value A
in
and is stated math-
ematically as
X
in
0 t 0<
A
in
t 0≥
⎩
⎨
⎧
=
(4.39)
The output of the system i n response to this input is called the step response of the
system. For a first-order system, we can find the step response by solving Equation
4.38 using Equation 4.39 with the initial condition
X
out
(0)
=
0
(4.40)
Assuming a solut ion of the form Ce
st
for the homogeneous form of differential
Equation 4.38, the characteristic equation is
τs + 1 = 0
(4.41)
alc80237_ch04_117-160.indd 134alc80237_ch04_117-160.indd 134 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
4.9 First-Order System 135
Since the root of this equation is s = −1/τ, the homogeneous or transient solution is
X
out
h
C e
t τ⁄–
=
(4.42)
where C is a constant determ ined later by applying initial conditions. A particular
or steady state solution resulting from the step input is
X
out
p
KA
in
=
(4.43)
The general solution is the sum of the homogeneous and particular solutions
(Equation 4.42 + Equation 4.43):
X
out
t() X
out
h
X
out
p
+ C e
t τ⁄–
KA
in
+==
(4.44)
Applying the initial condition ( Equation 4.40) to this equation gives
0 CKA
in
+=
(4.45)
thus,
CKA
in
–=
(4.46)
so the resulting step response is
X
out
t() KA
in
1e
t τ⁄–
–(
)
=
(4.47)
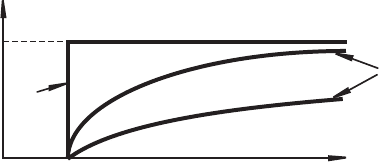
As illustrated in Figure 4.12, this represents an exponential rise in the output toward
an asymptotic value of KA
in
. The rate of the rise depends only on the time constant τ.
The response is faster for a smaller time constant.
Note that after one time constant, the output reaches 63.2% of its final value,
and from Equation 4.46,
X
out
τ() KA
in
1e
1
–
–()0.632KA
in
==
(4.48)
After four time constants, the s tep response is
X
out
4τ() KA
in
1e
4
–
–()0.982KA
in
==
(4.49)
Since this value is more than 98% of the steady state value KA
in
, we usually ass-
ume that a first-order system has reached its steady state value within four time
constants.
Figure 4.12 First-order response.
t
X
KA
in
small τ
large τ
X
ou
t
X
in
alc80237_ch04_117-160.indd 135alc80237_ch04_117-160.indd 135 1/4/11 3:48 PM1/4/11 3:48 PM

Confirming Pages
136 CHAPTER 4 System Response
When designing a first-order measurement system, look at quantities that affect
τ and try to reduce them if possible. The larger τ is, the longer the measurement sys-
tem takes to respond to an input.
An important example of a first-order system is an RC circuit (see Example 4.1),
which has a time constant of τ = RC (see Question 4.19). RC circuits are very com-
mon in timing, filter, and other applications (e.g., see Example 4.1, Section 6.12.3,
and Example 7.6). Video Demo 4.9 illustrates the step response of an RC circuit,
showing how the voltage across the capacitor builds over time. The speed of charg-
ing and discharging the capacitor is directly related to the time constant of the circuit.
4.9.1 Experimental Testing of a First-Order System
To characterize and evaluate an existing first-order system, we need methods to
experimentally determine the time constant τ and the static sensitivity K. K may be
obtained by static calibration, where a known static input is applied, and the output
is observed. A common method to determine the time constant τ is to apply a step
input to the system and determine the time for the output to reach 63.2% of its final
value (see Equation 4.48). An alternative method to determine a value for τ follows.
We can rearrange Equation 4.47, expressing it as
X
out
KA
in
–
KA
in
---------------------------
e
t τ⁄–
–=
(4.50)
Simplifying, we get
1
X
out
KA
in
------------–e
t τ⁄–
=
(4.51)
If we take the natural logarithm of both sides, we get
1
X
out
KA
in
------------–
⎝⎠
⎛⎞
l
n
t
τ
--
–=
(4.52)
If we define the left-hand side as Z, then
Ztτ
⁄
–=
(4.53)
and a plot of Z vs. t is a straight line with the slope
d
Z
dt
------
1
τ
-- -
–=
(4.54)
Therefore, if we collect experimental data from a step response and plot Z vs. t as
illustrated in Figure 4.13, we can determine τ from the slope of the line:
τ
Δ
t
ΔZ
-------
–=
(4.55)
Note that if experimental data fo r Z vs. t deviates from a straight line, then the
system is not first order. If this is the case, the system is either of higher order or
nonlinear.
Video Demo
4.9RC circuit
charging and
discharging
alc80237_ch04_117-160.indd 136alc80237_ch04_117-160.indd 136 1/4/11 3:48 PM1/4/11 3:48 PM

Confirming Pages
Figure 4.13 Experimental determination of τ.
t
t
–Z
experimental data for X
out
X
out
KA
in
–ΔZ
Δt
Figure 4.14 Second-order mechanical system and free -body diagram.
free-body diagram
of mass
kx
b dx/d
t
m
F
ext
k
m
b
x
F
ext
4.10 Second-Order System 137
4.10 SECOND-ORDER SYSTEM
An example of a second-order system, where N = 2 in Equation 4.30, is the mechan-
ical spring-mass-damper system illustrated in Figure 4.14. Applying Newton’s law
of motion (in this case, ΣF
x
= ma
x
) to the free-body diagram gives the second-order
differential equation, which is the mathematical model for the system:
m
d
2
x
dt
2
--------
b
dx
dt
----- -
kx++ F
ext
t()=
(4.56)
where m is the mass, b is the damping coefficient, k is the spring constant, and x
is the displacement of the mass from the equilibrium (rest) position of the mass
measured positively in the downward direction as shown. F
ext
(t) represents the resul-
tant of all applied external forces (inputs) in the direction of x. The weight of the
mass is not included as a force in the free-body diagram because the displacement
x is measured from the equilibrium position. In the equilibrium position, the spring
is stretched an amount from its unstretched length so that the effect of gravity
alc80237_ch04_117-160.indd 137alc80237_ch04_117-160.indd 137 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
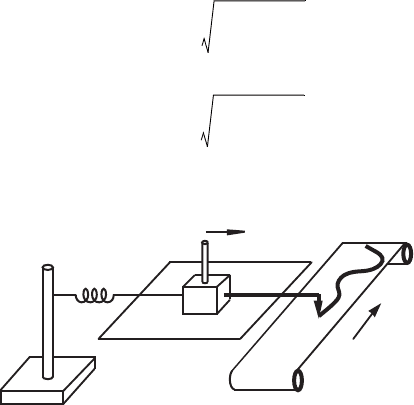
Figure 4.15 Strip chart recorder as an example of a second-order system.
fixed rigid support
elastic spring (k)
mass (m)
bearing support (b)
pen-paper contact
applied force (F
ext
)
138 CHAPTER 4 System Response
is balanced: k mg. Note that the spring force (kx) is in the opposite direction from
the mass displacement, and the damper force (b dx/dt) is in the opposite direction
from the velocity of the mass.
As we will see in Section 4.11, the governing equations for many second-order
systems other than mechanical spring-mass-damper systems (e.g., mechanical rota-
tional systems and hydraulic systems) have the same form as Equation 4.56.
A good example of a second-order measurement system is the strip chart
recorder illustrated in Figure 4.15. It consists of a continuously moving roll of paper
on which a pen is moved back and forth. A spring is attached to the pen carriage to
keep it centered in a neutral position when an applied force is removed. The strip
chart recorder can be thought of as a mechanical oscilloscope. It was used much
more before the digital age whenever a large amount of time-varying data needed to
be stored (e.g., for later analysis). They are still used in some applications (e.g., in
older remote seismograph stations and polygraph machines). The applied force F
ext
is provided by an electromagnetic coil whose core is attached to the pen carriage.
The spring keeps the pen carriage centered in the zero position when the input is 0.
The pen carriage bearings and the pen-paper interface result in the damping force.
The carriage and the pen constitute the mass to which the forces in the system are
applied.
To characterize the unforced response of a second-order system, we need to
solve the differential Equation 4.56 with F
ext
0. The characteristic equation is
ms
2
bs k++ 0=
(4.57)
This quadratic equation has two roots for s:
s
1
b
2m
-------–
b
2m
---------
⎝⎠
⎛⎞
2
k
m
----–+=
(4.58)
s
2
b
2m
-------–
b
2m
---------
⎝⎠
⎛⎞
2
k
m
----––=
(4.59)
alc80237_ch04_117-160.indd 138alc80237_ch04_117-160.indd 138 1/4/11 3:48 PM1/4/11 3:48 PM

Confirming Pages
4.10 Second-Order System 139
If there were no damping in the system (i.e., b 0), the roots would be
s
1
j
k
m
----=
(4.60)
s
2
j–
k
m
----=
(4.61)
and the corresponding homogeneous solution would be
x
h
t() A
k
m
---- t
⎝⎠
⎛⎞
cos B
k
m
---- t
⎝⎠
⎛⎞
sin+=
(4.62)
where A and B are constants determine d from the initial conditions x(0) and
dx/dt(0). This motion represents pure undamped oscillatory motion with radian
frequency:
ω
n
k
m
----=
(4.63)
This is called the natural frequency of the system, because it is the frequency at
which the undamped system would naturally oscillate if the spring were stretched
and the mass released and allowed to move without any external force (F
ext
= 0).
If there is damping in the system (i.e., b ≠ 0) and the radicand in Equations 4.58
and 4.59 is zero, the roots are double real roots, and the resulting transient homoge-
neous solution is
x
h
t() ABt+()e
ω
n
t–
=
(4.64)
This represents an exponentially decaying motion. A system with this behavior is
said to be critically damped, because it is just on the verge of damped oscillatory
motion. The damping constant that results in critical damping is called the critical
damping constant b
c
. It is the value of b that makes the radicand 0, so
b
c
2 km 2mω
n
==
(4.65)
The damping ratio ζ (zeta) for a noncr itically damped system is defined as
ζ
b
b
c
----
b
2 km
--------------
==
(4.66)
It is a measure of the proximity to crit ical damping. A critically damped system has
a damping ratio of 1.
With the definitions of natural frequency and damping ratio, the roots of the
characteristic equations (Equations 4.58 and 4.59) can be written as
s
1
ζ– ω
n
ω
n
ζ
2
1–+=
(4.67)
s
2
ζ– ω
n
ω
n
ζ
2
1––=
(4.68)
alc80237_ch04_117-160.indd 139alc80237_ch04_117-160.indd 139 1/4/11 3:48 PM1/4/11 3:48 PM
Confirming Pages
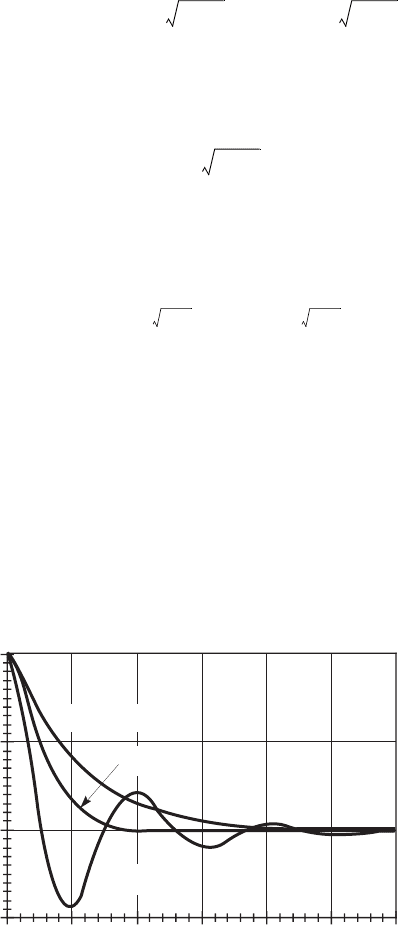
Figure 4.16 Transient response of second-order systems.
–0.5
0
0.5
1
0
transient homogeneous solution
x
h
(t)
0.5
1 1.5 2 2.5
3
time
overdamped
(ζ = 1.75)
critically damped
(ζ = 1.0)
underdamped
(ζ = 0.25)
140 CHAPTER 4 System Response
If there is damping in the system (i.e., b ≠ 0) and the radicand in Equations 4.67
and 4.68 is negative (i.e., ζ < 1), the roots are complex conjugates, and the resulting
transient homogeneous solution is
x
h
t() e
ζω
n
t–
A ω
n
1 ζ
2
– t()cos B ω
n
1 ζ
2
– t()sin+[]=
(4.69)
This motion represents damped oscillation c onsisting of sinusoidal motion with
exponentially decaying amplitude. A system with these characteristics is said to be
underdamped, because it has less than critical damping (ζ < 1). The frequency of
oscillation is
ω
d
ω
n
1 ζ
2
–=
(4.70)
which is called the damped natural frequency of the system.
If there is damping in the system (i.e., b ≠ 0) and the radicand in Equations 4.67
and 4.68 is positive (i.e., ζ > 1), the roots are distinct real roots and the resulting
transient homogeneous solution is
x
h
t() A e
ζ– ζ
2
1–+()ω
n
t
B e
ζ– ζ
2
1––()ω
n
t
+=
(4.71)
This represents an exponentially decaying output. A system with these characteris-
tics is said to be overdamped, because its damping exceeds critical damping (ζ > 1).
Examples of transient responses for all three cases of damping (under-
damped, critically damped, and overdamped) are illustrated in Figure 4.16.
The curves represent unforced motion of a second-order system with different
amounts of damping, when the system is released from rest (dx/dt(0) 0) at
x(0) 1.
Based on the definitions above, a more standard form for the differential equa-
tion representing a second-order system can be written as
x 2
n
x
n
2
x
n
2
___
k
F
ext
(4.72)
..
.
alc80237_ch04_117-160.indd 140alc80237_ch04_117-160.indd 140 1/4/11 3:48 PM1/4/11 3:48 PM