Загиров Н.Н. Теория обработки металлов давлением
Подождите немного. Документ загружается.

31
Инварианты тензора напряжений определяются по формулам:
I
1
= σ
xx
+ σ
yy
+ σ
zz
;
;
222
2
xzzzxxyzzzyyxyyyxx
zzxz
xzxx
zzyz
yzyy
yyxy
xyxx
I
σ−σσ+σ−σσ+σ−σσ=
=
σσ
σσ
+
σσ
σσ
+
σσ
σσ
=
(6.2)
.I
xyzzyzxxxzyyxzyzxyzzyyxx
zzzyzx
yzyyyx
xzxyxx
222
3
2 σσ−σσ−σσ−σσσ+σσσ=
σσσ
σσσ
σσσ
=
Инварианты (6.2) дают полную характеристику напряженного
состояния материальной частицы.
Корни характеристического уравнения λ
1
, λ
2
, λ
3
и являются главными
нормальными напряжениями σ
11
, σ
22
, σ
33
, а тензор напряжений записанный в
системе координат, совпадающей с направлениями главных нормальных
напряжений, будет иметь вид:
=
33
22
11
σ
σ00
0σ0
00σ
T (6.3)
Величину, составленную из линейного инварианта, определяемую по
формуле
(
)
( )
,
zzyyxx 332211
3
1
3
1
σ+σ+σ=σ+σ+σ=σ (6.4)
называют средним нормальным напряжением в точке.
Тензор напряжений можно представить в виде суммы двух тензоров:
T
σ
= T
σш
+ D
σ
(6.5)
32
Тензор, определенный матрицей
⋅σ=
σ
σ
σ
=
σ
100
010
001
00
00
00
ш
Т
(6.6)
называют шаровым. Для него любое направление является главным.
Шаровой тензор имеет один независимый инвариант I
1
= 3σ, второй и третий
инварианты зависимы и выражаются через σ или I
1
.
Тензор, определенный матрицей
σ−σσσ
σσ−σσ
σσσ−σ
=
σ
zzzyzx
yzyyyx
xzxyxx
D
, (6.6)
называют девиатором напряжений.
Инварианты девиатора напряжений имеют вид:
I
1
(D
σ
) = 0;
( )
( )( ) ( )( ) ( )( )
;
332233112211
2
σ−σσ−σ+σ−σσ−σ+σ−σσ−σ=
=
σ−σσ
σσ−σ
+
σ−σσ
σ
σ
−
σ
+
σ−σσ
σ
σ
−
σ
=
σ
zzzx
xzxx
zzzy
yzyy
yyxy
xyxx
DI
(6.7)
( )( )( )
.DI
zzzyzx
yzyyyx
xzxyxx
σ−σσ−σσ−σ=
σ−σσσ
σσ−σσ
σσσ−σ
=
332211σ3
)(
Напряженное состояние, определяемое T
σш
, ответственно за изменение
объема тела в процессе деформации. Напряженное состояние,
характеризуемое D
σ
, ответственно за изменение формы тела.
33
Большую роль в теории пластичности играет второй инвариант.
Неотрицательную величину, составленную из второго инварианта девиатора
напряжений, называют интенсивностью касательных напряжений и
определяют по формуле:
( )
(
)
(
)
+σ−σ+σ−σ==
σ
22
2
6
1
zzyyyyxx
DIТ
( )
(
)
=σ+σ+σ+σ−σ+
222
2
6
xzyzxyxxzz
(6.8)
( ) ( ) ( )
2
1133
2
3322
2
2211
6
1
σ−σ+σ−σ+σ−σ=
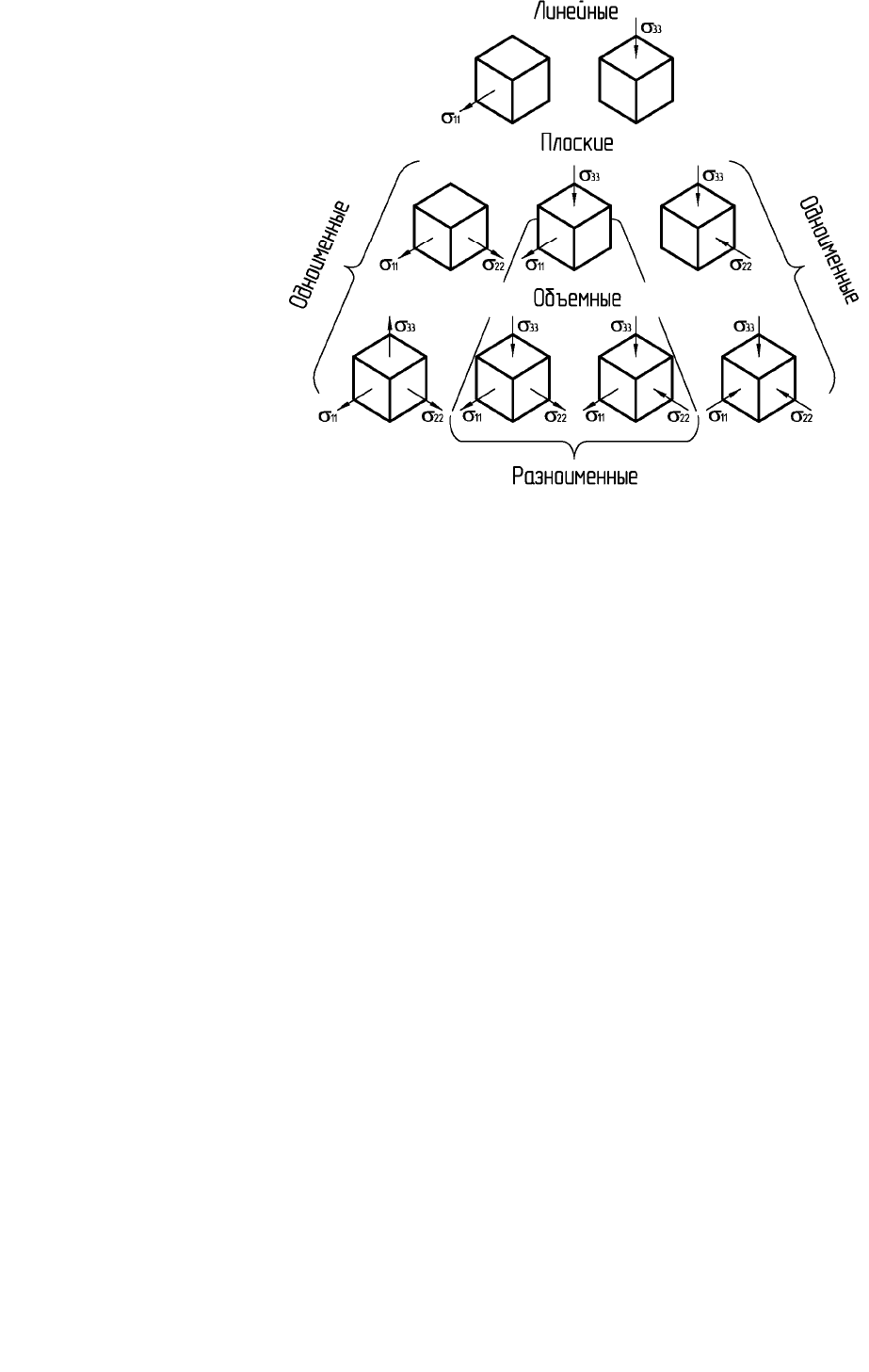
Схемы главных нормальных напряжений, исходя из количества
возможных векторов, бывают линейные (один вектор) – линейное
напряженное состояние, плоские (два вектора) – плоское напряженное
состояние и объемные (три вектора) – объемное напряженное состояние. При
этом линейных схем будет две – с положительным (растягивающим) или
отрицательным (сжимающим) напряжением. Плоские и объемные схемы,
кроме того, могут быть одноименные и разноименные. В одноименных
схемах все напряжения одного знака. Следовательно, может быть два вида
плоских одноименных схем (с двумя сжимающими или с двумя
растягивающими напряжениями) и два вида одноименных объемных схем (с
тремя растягивающими напряжениями – всестороннее растяжение или с
тремя сжимающими напряжениями – всестороннее сжатие).
Напомним, что при пластическом формоизменении не может быть
равенства трех напряжений, то есть равномерного всестороннего растяжения
или равномерного всестороннего сжатия.
Разноименные схемы бывают: плоские – только одного вида, а
объемные – двух (с двумя положительными напряжениями и одним
отрицательным или наоборот). Таким образом, существуют всего девять
возможных схем главных напряжений (рис. 6.1): две линейных, три плоских
и четыре объемных. Понятно, что в плоских и объемных схемах
соотношения между величинами напряжений могут быть различны.
34
Рис. 6.1. Возможные схемы напряженного состояния
При рассмотрении схем напряженного состояния необходимо
учитывать условие:
σ
11
≥ σ
22
≥ σ
33
,
и условие присвоения знаков: растягивающим напряжениям –
положительный знак, сжимающим – отрицательный.
Контрольные вопросы
1. Какие нормальные напряжения называют главными, как их можно найти?
2. Приведите правило присвоения индексов главным нормальным
напряжениям.
3. В чем состоит механический смысл первого инварианта тензора
напряжений?
4. Что такое девиатор напряжений? Что он характеризует?
5. Что называется интенсивностью касательных напряжений?
6. Какими уравнениями определяется связь между компонентами,
определяющими поле тензора напряжения?
35
7. Сколько главных нормальных напряжений может иметь тензор
напряжений?
8. Можно ли подсчитать второй и третий инварианты тензора напряжений,
если известны только главные нормальные напряжения?
9. Чем характеризуется линейная, плоская и объемная схемы напряженного
состояния?
ЛЕКЦИЯ 7
АНАЛИЗ НАПРЯЖЕННОГО СОСТОЯНИЯ.
ГЛАВНЫЕ КАСАТЕЛЬНЫЕ НАПРЯЖЕНИЯ. КРУГИ МОРА
План лекции:
1. Анализ напряженного состояния.
2. Октаэдрическая площадка.
3. Нормальные и касательные напряжения, действующие на октаэдрической
площадке.
4. Круги Мора.
6. Главные касательные напряжения.
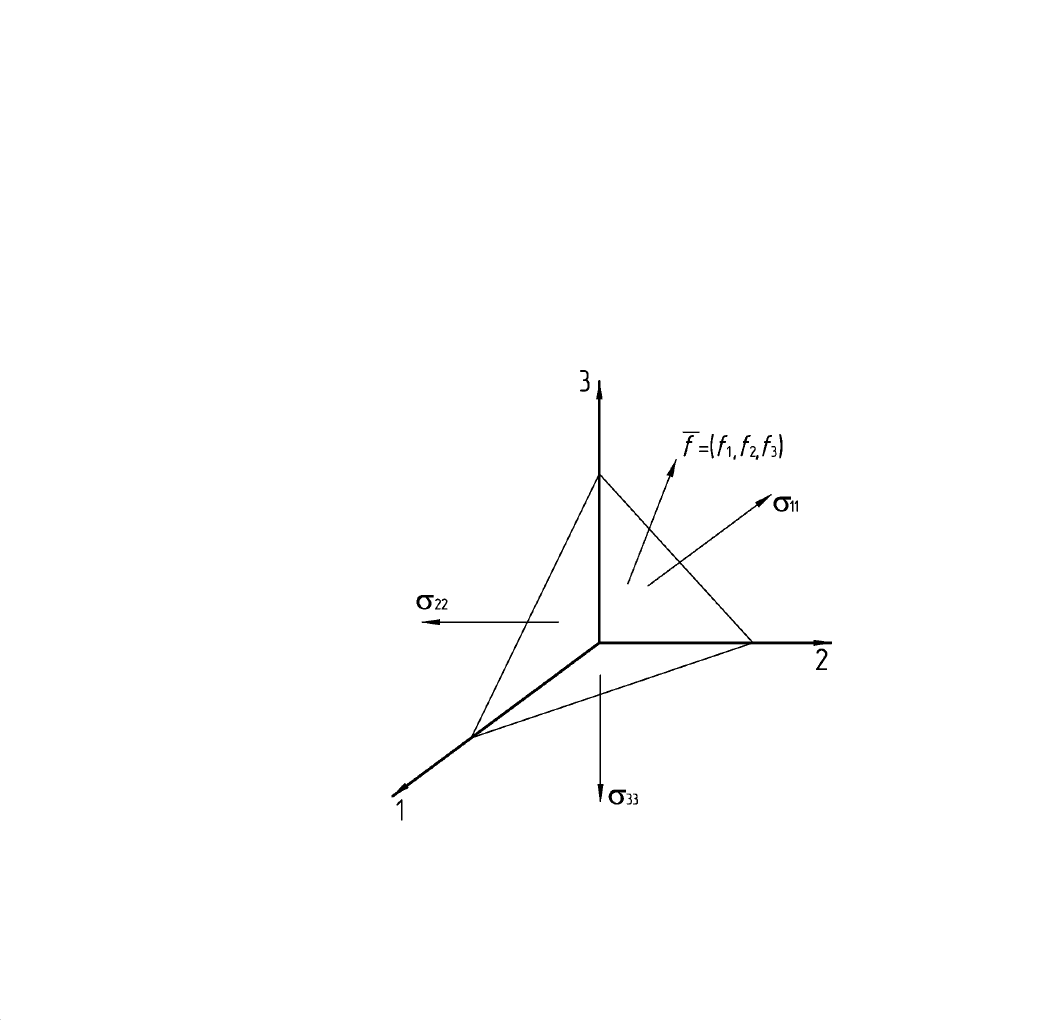
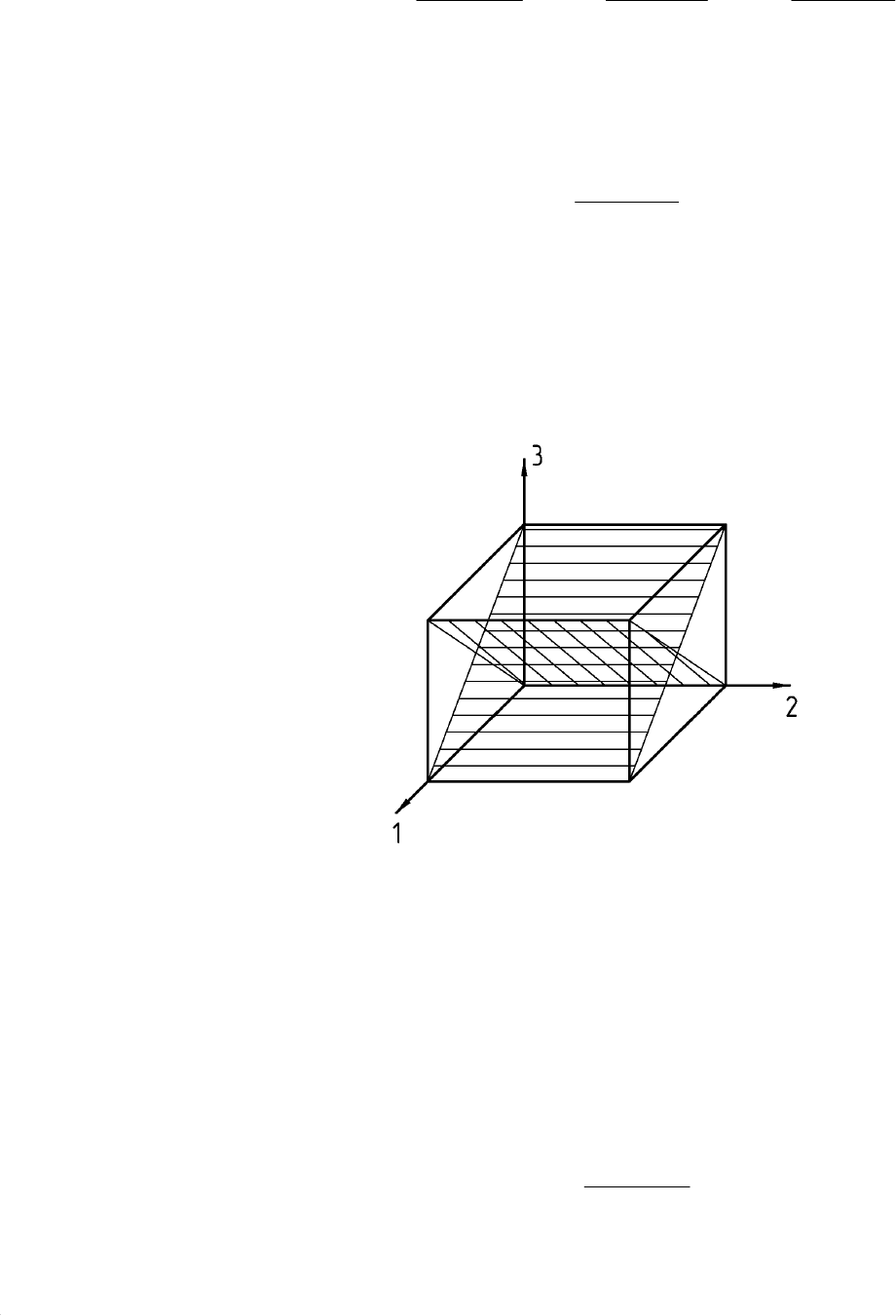
Рассмотрим теперь в некоторой точке тела площадку, одинаково
наклоненную к направлениям 1, 2, 3 главных нормальных напряжений (рис.
7.1).
Рис. 7.1. Главные напряжения, действующие на гранях тетраэдра
36
Такие площадки можно провести в каждом октанте на одинаковом
расстоянием от точки М, они образуют правильный восьмигранник –
октаэдр. Грань октаэдра называют октаэдрической площадкой.
Направляющие косинусы единичной нормали
n
к указанной на рисунке
октаэдрической площадке связаны условием:
1
2
3
2
2
2
1
=++ nnn
, (7.1)
а так как n
1
= n
2
= n
3
, то
3
1
=
i
n
,
где i = 1, 2, 3.
Проекции вектора напряжения
f
, действующего на этой площадке
(рис.7.1), имеет вид
f
1
= σ
11
n
1
; f
2
= σ
22
n
2
; f
3
= σ
33
n
3
.
Для того чтобы найти нормальные напряжения на октаэдрической
площадке, достаточно спроецировать f
1
, f
2
, f
3
на нормаль и результаты
сложить:
).(nnn
nfnfnfnf
iin
332211
2
333
2
222
2
111
332211
3
1
σ+σ+σ=σ+σ+σ
=
+
+
=
=
σ
(7.2)
Следовательно, нормальное напряжение на октаэдрической площадке
равно среднему нормальному напряжению.
Полное касательное напряжение на той же площадке:
Tf
nn
3
2
22
=σ−=τ
. (7.3)
Итак, если мысленно выделить из деформируемого тела материальную
частицу в виде правильного восьмигранника, то по его граням будут
37
действовать нормальные и касательные напряжения, определяемые в
соответствии с формулами (7.2) и (7.3).
Наглядное представление об области возможных значений нормальных
и касательных напряжений (σ
n
и τ
n
) на различных площадках, проходящих
через некоторую точку деформируемого тела, дает диаграмма Мора.
Исходным моментом для ее построения являются сведенные в систему
рассмотренные выше три уравнения:
=++
τ+σ=σ+σ+σ
σ=σ+σ+σ
1
2
3
2
2
2
1
222
3
2
33
2
2
2
22
2
1
2
11
2
333
2
222
2
111
nnn
nnn
nnn
nn
n
(7.4)
Используя известные математические приемы (в частности, формулы
Крамера), после ряда расчетов получим:
))((
))((
n
nnn
33112211
2
3322
2
1
σ−σσ−σ
τ+σ−σσ−σ
=
;
))((
))((
n
nnn
11223322
2
11332
2
σ−σσ−σ
τ+σ−σσ−σ
=
; (7.5)
))((
))((
n
nnn
22331133
2
2211
2
3
σ−σσ−σ
τ+σ−σσ−σ
=
.
Так как σ
11
≥ σ
22
≥ σ
33
, то, анализируя (7.5), можно сделать вывод:
0))((
2
1122
≥τ+σ−σσ−σ
nnn
;
0))((
2
1133
≤τ+σ−σσ−σ
nnn
;
0))((
2
2211
≥τ+σ−σσ−σ
nnn
.
Преобразуем эти неравенства и получим:
2
3322
2
2
3322
22
σ−σ
≥τ+
σ+σ
−σ
nn
;
38
2
33112
2
3311
22
σ−σ
≤τ+
σ−σ
−σ
nn
; (7.6)
2
2211
2
2
2211
22
σ−σ
≥τ+
σ+σ
−σ
nn
.
Неравенства (7.6) ограничивают область значений σ
n
и τ
n
,
действующих на всевозможных площадках, проходящих через некоторую
точку тела.
Если знаки неравенства заменить равенством и сопоставить
полученные выражения с уравнением окружности,
(x - a)
2
+ (y - b)
2
= R
2
,
то нетрудно убедиться, что уравнения (7.6) являются уравнениями
окружности.
Построим область возможных значений σ
n
и τ
n
.
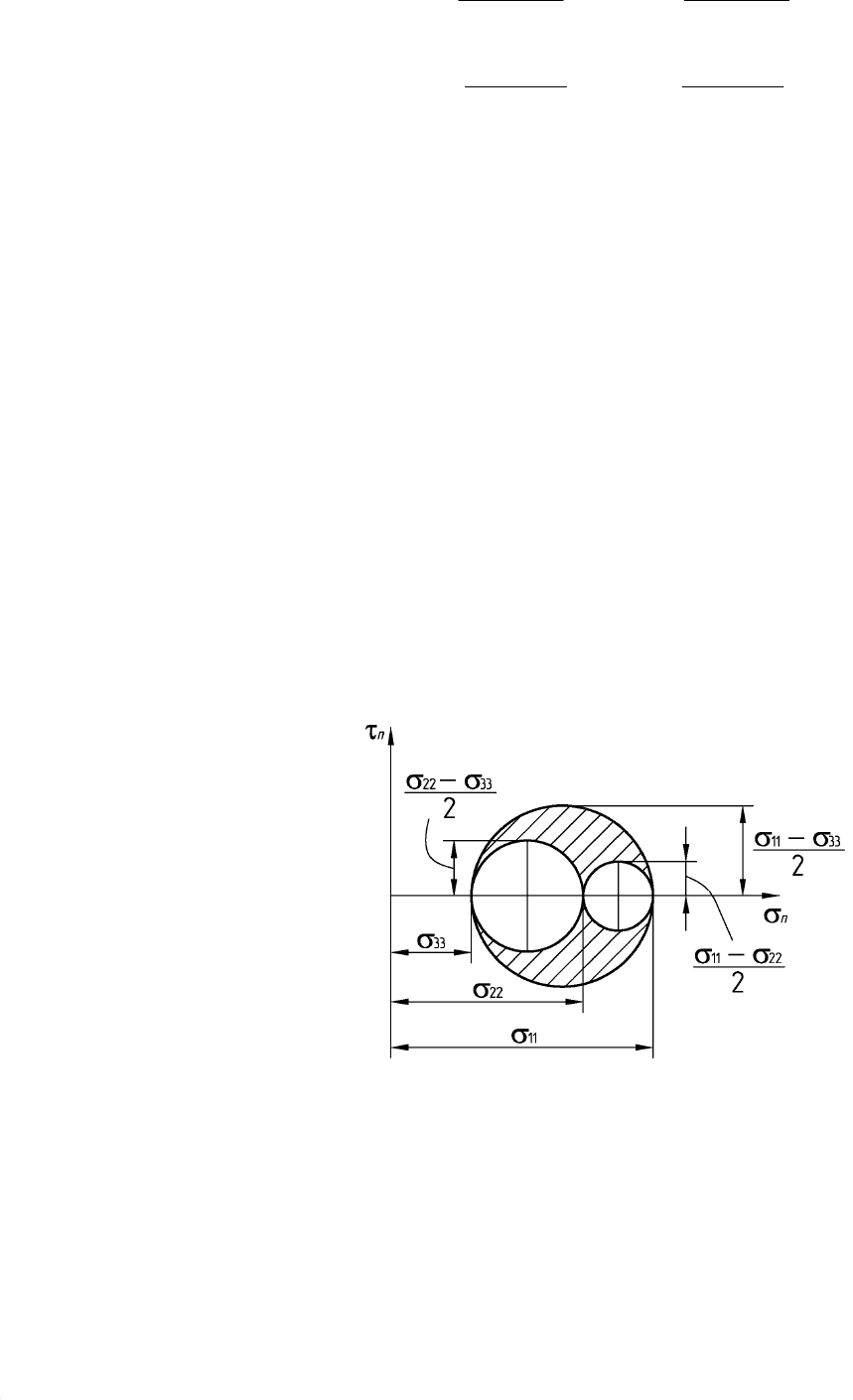
Возможные значения нормальных σ
n
и касательных τ
n
напряжений
лежат внутри области, ограниченной тремя окружностями (на рис. 7.2
заштрихованная часть), которые называют кругами Мора.
Рис. 7.2. Область возможных значений нормальных и касательных напряжений,
действующих в некоторой точке тела
39
Касательные напряжения τ
n
имеют три экстремальных значения:
2
3322
23
σ
−
σ
=σ
;
2
3311
13
σ
−
σ
=σ
;
2
2211
12
σ
−
σ
=σ
, (7.7)
которые называют главными касательными напряжениями. Наибольшее из
них является максимальным касательным напряжением:
2
3311
max
σ
−
σ
=τ .
Главные касательные напряжения действуют на площадках,
наклоненных под углом 45
0
к соответствующим главным направлениям. Так,
например, напряжения σ
13
действуют на площадках, наклоненных под углом
45
0
к 1 и 3 главным направлениям (рис. 7.3).
Рис. 7.3. Некоторых из площадок, где действуют главные касательные напряжения
Форму диаграммы Мора (рис. 7.2) можно охарактеризовать одним
числом, составленным как отношение разности диаметров малых кругов
Мора (σ
22
– σ
33
) – (σ
11
– σ
22
) к диаметру большого круга (σ
11
– σ
33
), которое
называют коэффициентом Лоде. Математическое выражение для него после
ряда преобразований можно записать в виде
12
3311
3322
−
σ−σ
σ
−
σ
=µ
σ
(7.8)

40
Контрольные вопросы
1. Сколько площадок главных касательных напряжений можно указать в
некоторой точке деформируемого тела?
2. Чему равно максимальное касательное напряжение?
3. Укажите области возможных значений нормальных и касательных
напряжений.
4. Чем характеризуется форма диаграмм Мора?
5. В каком случае имеет место подобие диаграмм Мора?
ЛЕКЦИЯ 8
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
И РАВНОВЕСИЯ
План лекции:
1. Связь между компонентами, определяющими поле тензора напряжений.
2. Уравнение поступательного движения частиц металла.
3. Дифференциальные уравнения движения и равновесия.
Любое деформируемое тело следует рассматривать как область,
которой соответствует тензорное поле второй валентности – поле тензора
напряжений. Установить связь между компонентами, определяющими поле
Т
σ
.
В некоторый фиксированный момент времени рассмотрим окрестность
произвольной точки М деформируемого тела, имеющую форму
параллелепипеда с гранями, параллельными координатным плоскостям, и
длинам ребер 2∆x, 2∆y, 2∆z. (рис. 8.1).
В точке М (центр параллелепипеда) напряженное состояние
определяется величинами σ
ij
= σ
ij
(x, y, z).