Xin Q. Diesel Engine System Design
Подождите немного. Документ загружается.

226 Diesel engine system design
© Woodhead Publishing Limited, 2011
∑ Step 2 – minimum- or maximum-contour optimization for the second
objective (Fig. 3.8b). The method continues by conducting another
constrained single-objective optimization to maximize the exhaust
temperature in the entire emissions domain. The DoE factors form
the same boundary mapped in this domain. It should be noted that the
maximum exhaust temperature point C, subject to the same emissions
constraints as for point A, has a higher BSFC than point A.
∑ Step 3 – multiple Pareto-optimal curves at different constraints (Fig.
3.8c). The two extreme points (A and C) of the Pareto-optimal curve
have been determined for a selected emissions level. Point B can be
generated by running a similar optimization as in Step 2 to maximize
the exhaust temperature while subject to a constraint at a certain BSFC
level that is selected between the BSFC of point A and the BSFC of
point C. Then, the Pareto curve can be constructed by linking points A,
B, and C to display the trade-off. It should be noted that the dotted curve
linking point A directly to point C is not a part of the Pareto optimal
front because the points along the dotted curve are not optimized in any
sense. Another Pareto-optimal curve at another emissions level A¢–B¢–C¢
can be obtained similarly. On these Pareto-optimal points, the values of
another objective function (e.g., the system cost) can be calculated and
marked on the chart to form certain constant-value contours. It is noted
that the system cost may reach a minimum along the Pareto-optimal
curve. A nal optimum solution can be selected from this chart.
Such a chart consisting of multiple Pareto-optimal curves is very convenient
and powerful for selecting the nal optimal solution in diesel engine system
design. The chart is featured by two objectives (BSFC vs. exhaust temperature
here, placed on the horizontal and vertical axes of the chart, respectively)
at several levels of constraints (emissions here) with the values of a third
objective (cost here) marked on the Pareto-optimal curves. The nal design
decision can be made based on such a concise summary of ‘four dimensions’
of information (i.e., three objectives of response/output plus one constraint)
that are distilled from many more dimensions of DoE input factors.
Other optimization methods such as desirability functions are introduced
in Edwards et al. (2000) and Myers and Montgomery (2002).
3.1.9 Optimization in design for target, design for
variability, and design for reliability
Diesel engine system design requires an optimized specication of both
nominal target value and tolerance. Steady-state engine optimization with
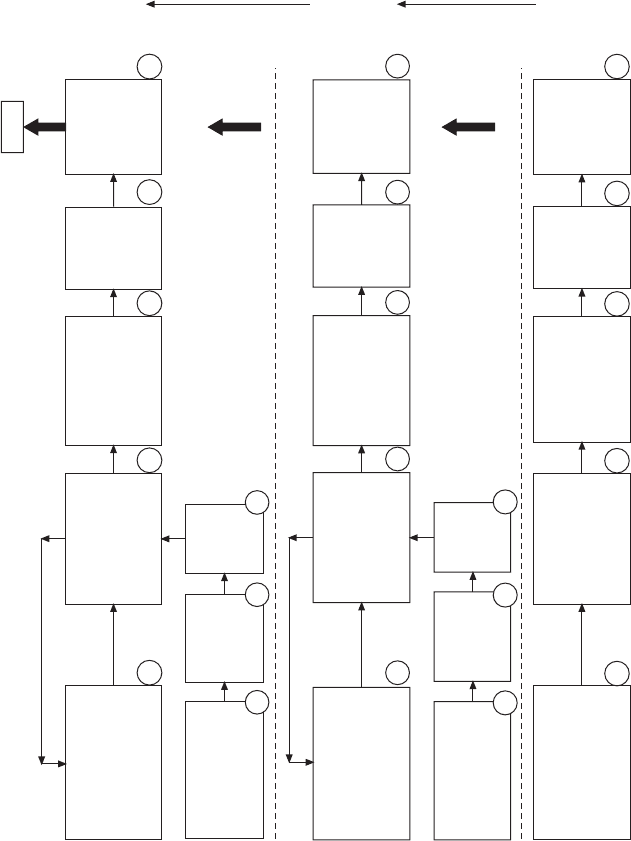
a large number of factors usually requires a DoE technique. Figure 3.9
illustrates the processes of the optimization for diesel engine system design.
The processes consist of three layers of work:
Diesel-Xin-03.indd 226 5/5/11 11:45:55 AM
© Woodhead Publishing Limited, 2011
Iterate for all cases in DoE-2 Optimal for reliability
Select factors & levels:
• Control factors (for
nominal & tolerance)
• noise factors (for
reliability probability
distribution)
Run Monte Carlo
simulation with
system models or
RSM-1 models,
output responses &
reliability statistics
Build DoE-2 RSM-2
emulator models
using factor levels
and probability
characteristic
responses/statistics
Optimize
to choose
nominal
values and
tolerances
Conduct
confirmation
runs
Select factors, setup
ranges and levels:
• Control factors
• All noise factors
Select factors, setup
ranges and levels:
• Control factors
• All noise factors
Select factors & levels:
• Control factors (for
nominal & tolerance)
• Noise factors (for
variability probability
distribution)
Run Monte Carlo
simulation with
system models or
RSM-1 models,
output responses &
reliability statistics
Build DoE-2 RSM-2
emulator models
using factor levels
and probability
characteristic
responses/statistics
Build DoE-1
RSM-1 emulator
models using
factor levels and
responses
Optimize
to choose
nominal
values and
tolerances
Optimize
to choose
nominal
values
Conduct
confirmation
runs
Conduct
confirmation
runs
Run reliability
models
to obtain
responses
Run system
models
to obtain
responses
Select factors, set up
ranges and levels:
• Control factors
• Noise factors
Build
DoE-1
RSM-1
emulator
models
Build
DoE-1
RSM-1
emulator
models
End
(Optional)
(Optional)
Run system models
to obtain responses
Optimal for variability
Preliminary sub-optimal
Iterate for all cases in DoE-2
Design for
reliability
(nondeterministic)
Design for
variability
(nondeterministic)
Design
for target
(deterministic)
3.4 3.5 3.6 3.7 3.8
3.1
2.4
2.5 2.6 2.7 2.8
2.1
2.2 2.3
1.1
1.2
1.3
1.4
1.5
3.2 3.3
3.9 DoE optimization process for steady-state diesel engine system design.
Diesel-Xin-03.indd 227 5/5/11 11:45:55 AM
228 Diesel engine system design
© Woodhead Publishing Limited, 2011
∑ a deterministic ‘design for target’ process to screen for preliminary sub-
optimal of the nominal value of the design specication
∑ a nondeterministic ‘design for variability’ process to reach the optimal
design – both nominal value and tolerance of the design specication,
subject to variability
∑ a nondeterministic ‘design for reliability’ process to reach the optimal
design – both nominal value and tolerance of the design specication,
subject to reliability.
The difference between variability and reliability is that reliability analysis
includes the effect of the time-dependent noise factors (e.g., deterioration).
The design for variability uses probabilistic objective functions to control both
nominal value and tolerance range in order to make the design insensitive
to noise factors.
The contents in steps 1.1–1.5 described in Fig. 3.9 for the layer of design
for target are explained in detail in Section 3.2. The RSM-1 model mentioned
in step 1.3 refers to the surface-t emulator model that relates the nominal
value of the response to factors. There is no emulator model for the tolerance
in this layer.
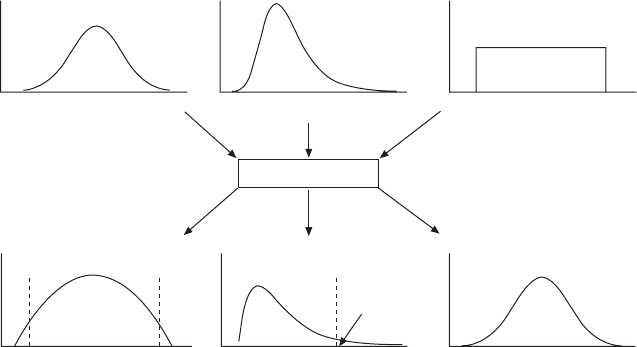
The optimization in design for variability is illustrated in steps 2.4–2.5
in Fig. 3.9. The associated Monte Carlo simulation is shown in Fig. 3.10.
Basically, the Monte Carlo simulation is a probability calculation by using
random combinations of random samples selected from the probabilistic
distributions of several input factors. The probabilistic distribution of the
output response can be predicted along with an estimation of the failure
rate or reliability. To make the estimation accurate, the amount of random
Normal distribution Extreme value
distribution
Uniform
distribution
X
1
Y
1
X
2
Y
2
X
3
Y
3
Model Y = f (x)
Beta distribution Gamma distribution Normal distribution
Reliability
= 90%
3.10 Statistical uncertainty propagation and design for variability.
Diesel-Xin-03.indd 228 5/5/11 11:45:56 AM
229Optimization techniques in diesel engine system design
© Woodhead Publishing Limited, 2011
samples needs to be very large. The details of the Monte Carlo simulation
are provided in Section 3.4.
The noise factors mentioned in step 2.1 in Fig. 3.9 refer to all the noise
factors covered by the variability analysis. The steps 2.1–2.3 compose
DoE-1, and they are similar to steps 1.1–1.3 in nature. The level setting of
the noise factors in step 2.1 is handled in the same manner as in step 1.1
(i.e., only for levels of mean values). The DoE-1 RSM-1 emulator surface-t
models are often needed as surrogate models to replace the computationally
intensive engine cycle simulation models because the Monte Carlo simulation
in step 2.5 requires thousands of runs. The thousands of Monte Carlo runs
need to be iterated for each case in DoE-2. It should be noted that the level
setting of the noise factors in the DoE-2 in step 2.4 is different from that in
step 2.1 (or step 1.1). The noise factors in step 2.4 need to be described by
several distribution factors (e.g., mean, standard deviation; scale parameter
and shape parameter) to reect its particular probabilistic distribution shape.
These factors are called probability distribution factors. Each probability
distribution factor is a factor in DoE-2. Each noise factor in step 2.4 needs
to have several factor levels for each probability distribution factor within
a reasonable range for the shape of the given type of probability function.
For example, for a noise factor of turbine efciency, its ‘mean value’ factor
needs to have ve levels of setting to cover a range of possible mean values
of the probabilistic distribution of the turbine efciency, for example at
58%, 59%, 60%, 61%, and 62%. Its ‘standard deviation’ factor also needs
to have ve levels of setting to cover a range of possible different shapes of
the probabilistic distribution of the turbine efciency, for example at 0.3%,
0.6%, 0.9%, 1.2%, and 1.5%. Obviously, the DoE size in step 2.4 is usually
larger than that in step 2.1. For example, assuming the DoE-2 in step 2.4
has 10 factors (i.e., 4 control factors, and 3 noise factors which give 6 noise
probability distribution factors) and 210 cases (runs), for each case the Monte
Carlo simulation needs to be executed 1000 times by taking 1000 random
probability sample combinations. Such a huge amount of computation usually
cannot be handled by using the original detailed system models. Therefore,
the RSM-1 model described in step 2.3 is needed here as the fast surrogate
model.
The output of step 2.5 in Fig. 3.9 includes all the engine responses in
the form of probabilistic distribution shapes, their statistical properties for
a selected t of probability distribution function, and probability statistics
(i.e., failure rate for variability). The statistical properties of the responses
may include the following: minimum, maximum, mean, standard deviation,
skewness, excess kurtosis, and mode. (For the denition of these probability
distribution parameters, see Tables A.1 and A.2 in the Appendix.) Suspected
outliers in the probability distribution of the simulated responses are not
uncommon. Outliers are not necessarily bad data points. They should be
Diesel-Xin-03.indd 229 5/5/11 11:45:56 AM
230 Diesel engine system design
© Woodhead Publishing Limited, 2011
handled carefully instead of simply being removed automatically. The
RSM-2 emulator models are described in step 2.6 by linking the factors of
DoE-2 to the probability distribution responses and probability statistics.
The emulator models allow an evaluation of the sensitivity of the output’s
probability distributions to all the input factors by using the analysis techniques
introduced earlier (e.g., parametric sweeping, two-dimensional optimization
with contour maps).
Step 2.7 is critical in robust optimization. In the traditional theory of robust
design, Dr Taguchi used a ‘two-step optimization’ approach (Fowlkes and
Creveling, 1995). In this approach, the product’s tolerance is rst reduced
to a desirable probability distribution shape, then, the entire probability
distribution curve is shifted to the desirable target by adjusting the nominal
design value. Such a two-step approach has certain disadvantages. For
example, the nominal target design and tolerance design are separated and their
interactions are difcult to be handled efciently. In the robust optimization
theory for diesel engine system design here, those disadvantages are overcome
by using a one-step simultaneous optimization of both nominal design and
tolerance design. The mathematical formulation of the optimization by using
the DoE-2 RSM-2 emulator models in step 2.7 enables such a simultaneous
optimization because the models include all the statistical properties (nominal
or mean, tolerance or deviation) for constrained optimization (e.g., subject to
a constraint of failure rate at or less than certain prescribed target value). It
should be noted that such an advantage of the proposed ‘design for variability’
approach over the traditional ‘two-step optimization’ approach can only be
achieved by introducing the RSM into the robust design area.
The last layer of the system optimization is design for reliability. It is similar
to the design for variability (Fig. 3.9), but still different. The reliability-related
system models, probability distributions, and output statistics should be used
in steps 3.2, 3.4, and 3.5 shown in Fig. 3.9, respectively. As a comparison,
the variability-related items should be used in steps 2.2, 2.4, and 2.5.
3.2 Response surface methodology (RSM)
Response surface methodology (RSM) is a DoE approach in which the output
variables are called ‘responses’ and the independent input variables are called
‘factors’. The response function forms a surface or hyper-surface (if there
are more than two factors) in the factor space. Optimization is conducted
to search for a global optimal point (minimum or maximum) on a surface
dened by the objective function. Detailed discussions on RSM are provided
by Eriksson et al. (1999) and Myers and Montgomery (2002). A brief overview
of the most important concepts and procedures in the RSM theory related to
diesel engine system design is summarized in this section.
Diesel-Xin-03.indd 230 5/5/11 11:45:56 AM
231Optimization techniques in diesel engine system design
© Woodhead Publishing Limited, 2011
3.2.1 Overview of the RSM process
Engine optimization requires a continuous quantitative mathematical model
to link the factors to responses (either steady state or transient) and solve
for global optima. In engine applications the relationship between the design
or operating factors and the responses is highly nonlinear and complex. For
example, the impact of turbine area and EGR valve opening on air ow
rate is governed by a large nonlinear system of equations of the engine in-
cylinder cycle process, engine gas ow network, and turbocharging. The
underlying mechanisms are so complex that they cannot be condensed to
‘one equation’ that still reects the physical laws and can be used as the
objective or constraint function. Moreover, sometimes the true functional
relationships or physical models are not even understood or available, and
the governing equations of the processes are simply lacking. The engineer
must approximate the underlying processes with an appropriate empirical
model in the form of:
Y
obs
= Y + u = f(X
1
, X
2
, . . ., X
k
) + u 3.11
which links the input factors X
i
to an approximation (Y) of the observed
output response Y
obs
. It should be noted that the terms in the empirical model
usually do not contain any physical meaning. Here u is an error term that
reects the sum of experimental errors and the ‘lack-of-t’ model errors not
accounted for in the function f. The experimental errors are usually assumed
to have a normal distribution with a mean at zero and a constant variance.
In the RSM, such a model is built with the linear regression technique by
tting a set of sample data to minimize the errors. Although more complicated
mathematical functions (e.g., spatial stochastic process models or sophisticated
weighted linear interpolation models, neural network, radial basis function
network, and spline-cubic function) may be used to t the data, polynomial
models are most widely used to approximate the true functions. Usually, for
a RSM problem with multiple input factors the function f is a rst-, second-
or third-order polynomial. Such an empirical model is called a response
surface model or surface-t emulator.
The RSM optimization process usually consists of the following six
steps:
1. Prepare factors and their levels in a statistical DoE design matrix.
2. Generate responses by either experimental testing or numerical simulation
(for instance, using the engine cycle simulation software to produce
performance output data).
3. Build emulators to link the factors and the responses by using polynomials
or other continuous functions with surface t.
4. Validate the emulator models by checking the surface-t accuracy with
spare runs (i.e., use the DoE runs that are not used during emulator
model building to test the accuracy of model prediction).
Diesel-Xin-03.indd 231 5/5/11 11:45:56 AM
232 Diesel engine system design
© Woodhead Publishing Limited, 2011
5. Conduct optimization by using the emulator and advanced searching
algorithms to search for the global optima under given constraints.
6. Produce con rmation runs for the optimum result.
3.2.2 Building emulator models
Appropriate statistical DoE design is dependent upon the model structure of
the emulator. Unlike the curve t for a response with respect to only a single
factor where a polynomial of very high order (e.g., 6th order) can be used, a
lower-order polynomial (usually less than 3rd) is generally used in RSM to
handle multiple factors. For a complex process, lower order or fewer terms
in the polynomial model generally makes the model deviate more from the
true physical mechanism, but allows fewer DoE runs to build the model.
For a simple linear system without interactions, a rst-order polynomial
model, also called main effect model, can be used. It is given by
YY
CC
X
obs
YY
obs
YY
i
k
ii
YY =YY
YY YY
+
=1
uu
uu
+
uu
+
uu
CC
uu
CC
X
uu
X
ii
uu
ii
X
ii
X
uu
X
ii
X
uu
CC CC
uu
CC CC
CC+ CC
uu
CC+ CC
uu
CC CC
uu
CC CC
ii
ii
uu
ii
ii
X
ii
X X
ii
X
uu
X
ii
X X
ii
X
uu
=
uu
=
uu
0
CC
uu
CC
0
CC
uu
CC
CC CC
uu
CC CC
0
CC CC
uu
CC CC
S
CCSCC
CC
uu
CCSCC
uu
CC
Ê
uu
Ê
uu
Ë
uu
Ë
uu
uu
Ë
uu
uu
Á
uu
Ê
Á
Ê
uu
Ê
uu
Á
uu
Ê
uu
Ë
Á
Ë
uu
Ë
uu
Á
uu
Ë
uu
uu
Ë
uu
Á
uu
Ë
uu
ˆ
uu
ˆ
uu
¯
uu
¯
uu
uu
¯
uu
uu
˜
uu
ˆ
˜
ˆ
uu
ˆ
uu
˜
uu
ˆ
uu
¯
˜
¯
uu
¯
uu
˜
uu
¯
uu
uu
¯
uu
˜
uu
¯
uu
3.12
where Y
obs
is the observation values of the DoE test run, and Y is the tted
value by the polynomial model. If there is a ‘curvature’ on the surface of the
response function, interaction terms or a higher-order polynomial must be
used to model the ‘curvature’ in such a more complex system. For example,
a linear-with-interaction model is given by
YY
CC
obs
YY
obs
YY
i
k
ii
ii
j
k
j
YY =YY
YY YY
+
=
CC CC
CC CC
CC+ CC
=1
=1
ii=1ii
,<
ii,<ii
j,<j
1
=2
u
CC
0
CC
0
CC
0
CC
CC CC
0
CC CC
SS
CCSSCC
XSSX
ii
SS
ii
X
ii
XSSX
ii
X
+SS +
S
–
kkk
ij
ij
CX
ij
CX
ij
CX
ij
CX
ij
X
ij
X
ij
ij
ij
ij
ij
CX CX
ij
CX
ij
ij
CX
ij
ij
X
ij
ij
X
ij
+
Ê
Ë
Ë
Á
Ê
Á
Ê
Ë
Á
Ë
Ë
Á
Ë
ˆ
¯
¯
˜
ˆ
˜
ˆ
¯
˜
¯
¯
˜
¯
u
3.13
where X
i
X
j
is the interaction term. Another example is a second-order
(quadratic) model, which is a second-order Taylor series approximation:
YY
CC
XC
X
obs
YY
obs
YY
i
k
ii
XC
ii
XC
i
k
ii
i
YY =YY
YY YY
+
=
CC CC
CC CC
CC+ CC
=1
=1
2
u
CC
0
CC
0
CC
0
CC
CC CC
0
CC CC
SS
CCSSCC
XCSSXC
ii
SS
ii
XC
ii
XCSSXC
ii
XC
XC +XCSSXC +XC
+
+
=1
,<
1
=2
SS
ii
=1ii=1
,<ii,<
j
,<j,<
k
j
k
ij
ij
ij
CX
CX
ij
CX
ij
ij
CX
ij
X
ij
X
ij
–
Ê
Ë
Ë
Á
Ê
Á
Ê
Ë
Á
Ë
Ë
Á
Ë
ˆ
¯
¯
˜
ˆ
˜
ˆ
¯
˜
¯
¯
˜
¯
u
3.14
Note that equations 3.12–3.14 contain p terms of polynomial or regression
coef cients, where
pk
p
pk = 1 +pk
=
fo
r
fi
rs
t-
or
de
r
w
ithout inter
actio
ithout interactioithout inter
n
1 +
(
–
)
fo
r
fi
rs
t-
or
de
r
w
ith inter
a
ith interaith inter
kk
kk
+ kk+
k
12
)12)
/
12/12
ctio
cctioc
n
fo
r
s
econd-
or
de
r
+
(
1)
pk
= 1 + 2pk = 1 + 2
kk
(kk (
–/
1)–/ 1)
2
w
ith inter
actio
ith interactioith inter
n
Ï
Ì
Ô
Ï
Ô
Ï
Ì
Ô
Ì
Ó
Ô
Ì
Ô
Ì
Ó
Ô
Ó
3.15
and k is the number of factors. One advantage of using polynomial in the
Diesel-Xin-03.indd 232 5/5/11 11:45:57 AM
233Optimization techniques in diesel engine system design
© Woodhead Publishing Limited, 2011
emulator is that the polynomials are everywhere differentiable so that the
derivative-based optimization algorithms can be used to search for the optima.
A second-order model requires more DoE runs and also more factor levels
to construct than a rst-order model.
A rst-order model of Y = C
0
+ C
1
X
1
shows a straight line in the domain
of response vs. factor (Y vs. X
1
). A rst-order model of Y = C
0
+ C
1
X
1
+
C
2
X
2
without interactions gives a tilted plane in the three-dimensional space
domain of response vs. factor (Y vs. X
1
and X
2
). It is reected as a contour
map in the two-dimensional domain of X
1
vs. X
2
for the response that has
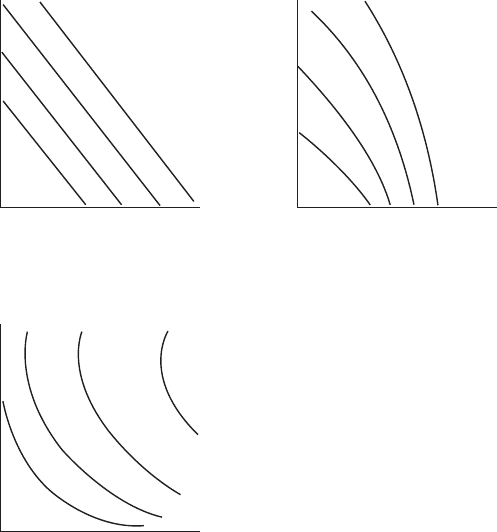
parallel straight lines with constant intervals (Fig. 3.11a). A higher-order
model including the interaction terms is characterized by the non-parallel
variable-interval contours (Fig. 3.11b and Fig. 3.11c), or the shapes of
stationary ridges, rising ridges, mountains or saddle surfaces if viewed in a
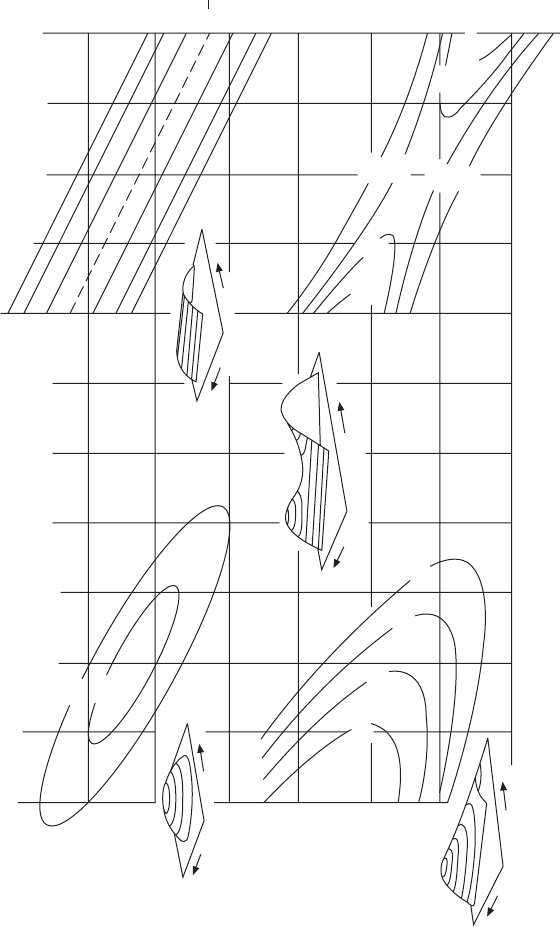
three-dimensional space (Fig. 3.12).
Second-order polynomials have been widely used because they offer a good
compromise between model exibility and DoE size. Usually a second-order
Factor X
2
Factor X
2
Factor X
2
Y = 10
Y = 10
Y = 10
20
20
20
30
30
30
40
40
40
Factor X
1
Factor X
1
Factor X
1
(a) First-order model
without interaction
(c) Second-order model
with interaction
(b) First-order model with
interaction
3.11 Interaction effects.
Diesel-Xin-03.indd 233 5/5/11 11:45:57 AM
© Woodhead Publishing Limited, 2011
(a) Simple maximum
(b) Stationary ridge
(c) Rising ridge (d) Col, saddle, or minimax
76
80
92
84
76
68
84
82
76
80
80
76
82
84
72
76
80
81
80
76
72
x
1
x
2
x
2
x
2
x
1
x
1
x
1
x
1
1
3
h = 80 + 4x
1
+ 8x
2
– 4x
1
2
– 12x
2
2
– 12x
1
x
2
h = 80 – 4x
1
+ 12x
2
– 3x
1
2
– 12x
2
2
– 12x
1
x
2
h = 80 + 4x
1
+ 8x
2
– 3x
1
2
– 12x
2
2
– 12x
1
x
2
h = 80 + 4x
1
+ 8x
2
– 2x
1
2
– 12x
2
2
– 12x
1
x
2
3.12 Some examples of types of surfaces defined by the second-order model in two variables x
1
and x
2
(from Box and
Draper, 1987; also adapted by Myers and Montgomery, 2002).
Diesel-Xin-03.indd 234 5/5/11 11:45:58 AM

235Optimization techniques in diesel engine system design
© Woodhead Publishing Limited, 2011
model is necessary and suf cient to approximate the true response surface
in most applications of engine system design except for some extremely
nonlinear scenarios (e.g., soot sensitivity, very complex interactions among
the factors, or very large range of the DoE factors). In these cases, a third-
order model becomes necessary. For example, the cubic terms
X
i
3
and the
interaction terms
XX
ij
XX
ij
XX
2
XX
2
XX
or X
i
X
j
X
u
need to be used for a highly nonlinear
exhaust restriction ow coef cient, EGR circuit restriction ow coef cient,
or VGT vane opening, also taking their interactions with other factors into
account (Figs 3.13 and 3.14).
Polynomial models are ‘parametric’ models which provide the regression
coef cients to represent the model structure and individual factor effects. In
statistics, the regression coef cients are called ‘parameters’. Non-parametric
or non-polynomial models cannot output such descriptions of the model
structure or the model coef cients. The non-parametric models include spatial
stochastic process models, radial basis function, and neural network. They
offer exibility to adapt to the characteristics of highly nonlinear responses
or to build accurate models in the presence of noisy or uncertain experimental
or simulation data. The validity of higher-order polynomial models compared
to other non-polynomial models has been proved by Bates et al. (2000). The
details of stochastic process models are explained by Edwards et al. (2000).
Neural network models are discussed by Shayler et al. (2000) and He and
Rutland (2004).
Although sometimes it cannot match over the entire factor space, a
polynomial model usually can approximate the true functional relationship
quite well for a relatively small region. Assuming the number of DoE runs
is n for each response parameter shown in equation 3.14, the sum of the
squares of the errors of all n runs is given by:
S
SS
S
r
n
r
r
n
obs
r
i
k
ii
r
i
YC
SSYCSS
obs
YC
obs
SS
obs
SSYCSS
obs
SS
r
YC
r
SS
r
SSYCSS
r
SS
CX
ii
CX
ii
=1
2
=1
,
=1
,
=1
=
SSYCSS – SSYCSS
–
u
0
SS
0
SS
SS-SS
kkk
ii
ir
ii
j
k
j
k
ij
ir
jr
CX
ii
CX
ii
CX
ij
CX
ij
X
,
ir,ir
–
2
=1
ii=1ii
,<
ii,<ii
j,<j
1
=2
,,
ir,,ir
jr,,jr
2
–
SS
Ê
SS
Ê
SS
Ë
SS
Ë
SS
SS
Á
SS
SS
Ê
SS
Á
SS
Ê
SS
Ë
Á
Ë
SS
Ë
SS
Á
SS
Ë
SS
ˆ
¯
˜
ˆ
˜
ˆ
¯
˜
¯
3.16
The method of least-squares is used to solve for the regression coef cients
in the polynomial model by minimizing
S
r
n
r
=1
2
u
. The model parameters or
regression coef cients C
i
, C
ii
and C
ij
, i, j = 1, . . . k, in equations 3.12–3.14 are
solved by multiple linear regression analysis with the method of least-squares
(also called surface t). The coef cients are affected by the experimental
design of the DoE matrix that is used to collect the data. The difference
between the observation value Y
obs
and the tted value Y is called residual.
The details of the mathematical solution of least-squares and analysis of
variance (ANOVA) are provided by Eriksson et al. (1999) and Myers and
Diesel-Xin-03.indd 235 5/5/11 11:45:59 AM