Wilamowski B.M., Irwin J.D. The Industrial Electronics Handbook. Second Edition: Industrial Communication Systems
Подождите немного. Документ загружается.

4-12 Industrial Communication Systems
4.5.6 Sensor Protocols for Information via Negotiation
Sensor.protocols.for.information.via.negotiation.[HKB99].are.a.family.of.protocols.used.to.eciently.
distribute.information.in.a.WSN..Conventional.data.dissemination.approaches.such.as.ooding.and.
gossiping. waste. valuable. communication. and. energy. resources. by. sending. redundant. information.
throughout.the.network..SPIN.use.data.negotiation.and.resource-adaptive.algorithms..Nodes.running.
SPIN.assign.a.high-level.name.to.their.data,.called.meta-data,.and.perform.meta-data.negotiations.
before.any.data.is.transmitted;.therefore,.there.is.no.redundant.data.sent.through.the.network..SPIN.has.
access.to.the.current.energy.level.of.the.node.and.adapts.the.protocol.it.is.running.based.on.the.remain-
ing
.energy..e.SPIN.family.protocols.use.three.types.of.messages:.when.a.SPIN.node.has.some.new.
data,.it.sends.an.advanced.(ADV).message.containing.metadata.to.its.neighbors..When.a.SPIN.node.
wishes.to.receive.the.data,.it.sends.an.REQ.message,.and.then.there.are.DATA.messages.that.are.messages.
with.a.metadata.header.
e
.SPIN.family.of.protocols.is.made.up.of.dierent.protocols,.SPIN-1,.and.SPIN-2;.they.incorporate.
negotiation.before.transmitting.data.in.order.to.ensure.that.only.useful.information.will.be.transferred,.
SPIN-BC.(for.broadcast.channels),.SPIN-PP.(designed.for.point-to-point.communications),.SPIN-EC.
(with.low.energy.threshold),.and.SPIN-RL.
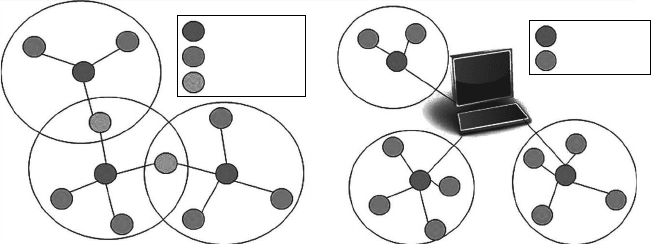
4.5.7 Low Energy adaptive Clustering Hierarchy
LEACH.[HChB00].is.a.cluster-based.protocol,.which.includes.distributed.cluster.information..is.pro-
tocol
.randomly.selects.a.few.sensor.nodes.as.cluster.heads.(CHs).and.rotates.this.role.to.evenly.distribute.
the.energy.load.among.the.sensors.in.the.network..Figure.4.6.shows.rstly.a.typical.network.based.on.
clusters,.and.secondly.how.a.WSN.is.applied.
LEACH
.has.two.phases,.the.setup.phase.and.the.steady.state.phase..In.the.setup.phase,.the.clusters.
are.organized.and.CHs.are.selected..In.the.steady.state.phase,.the.actual.data.transfer.to.the.base.sta-
tion
.(BS).takes.place..e.duration.of.the.steady.state.phase.is.longer.than.the.duration.of.the.setup.
phase.in.order.to.minimize.overhead..All.elected.CHs.broadcast.an.advertisement.message.to.the.rest.
of.the.nodes.in.the.network.that.they.are.the.new.CHs,.and.the.rest.of.nodes.decide.to.which.they.
want.to.belong.to.and.inform.the.appropriate.CHs..is.decision.is.based.on.the.signal.strength.of.
the.advertisement.
During
.the.steady.state.phase,.the.sensor.nodes.can.begin.sensing.and.transmitting.data.to.the.CHs..
e.CH.node,.aer.receiving.all.the.data,.aggregates.it.before.sending.it.to.the.BS..Each.cluster.commu-
nicates
.using.dierent.code.division.multiple.access.(CDMA).codes.to.reduce.interference.from.nodes.
belonging.to.other.clusters.
C1
C2
C3
C2
C1
C3
Base station
Cluster head
Sensor node
Cluster head
Regular node
Gateway
FIGURE 4.6 Example.of.a.typical.network.based.on.clusters.and.application.in.a.sensor.network.
© 2011 by Taylor and Francis Group, LLC
Routing in Wireless Networks 4-13
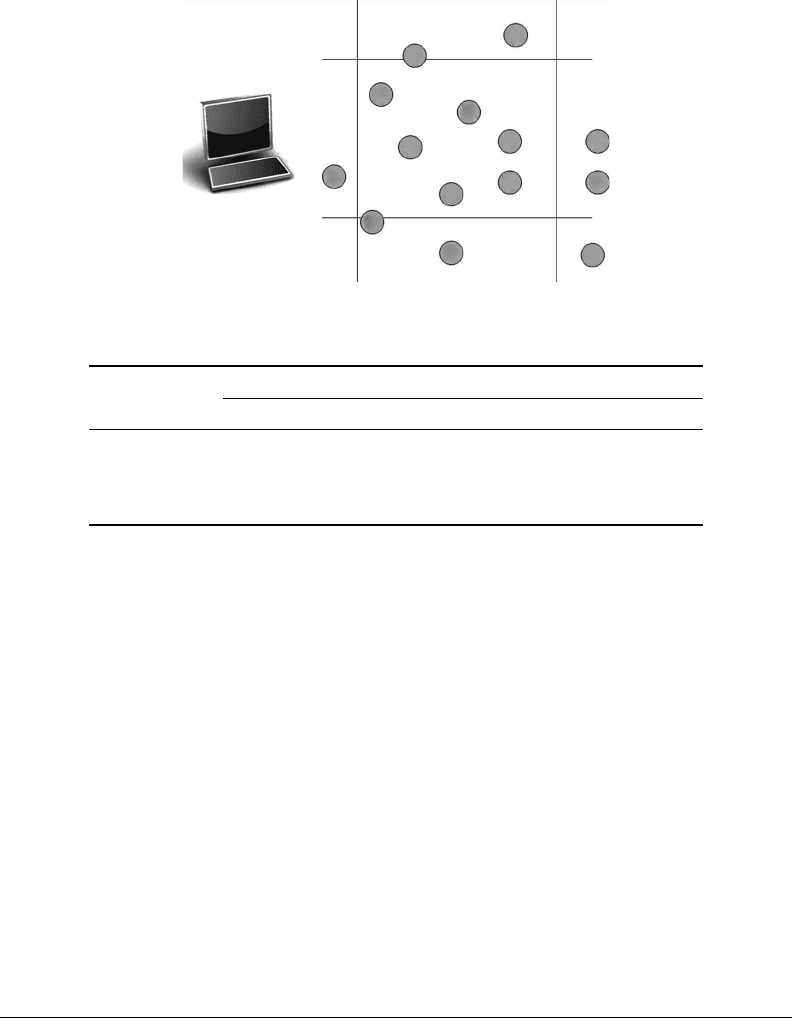
4.5.8 Geographic adaptive Fidelity
GAF.[XHE01].is.an.energy-aware.location-based.routing.algorithm.designed.primarily.for.mobile.ad.hoc.
networks,.but.may.be.applicable.to.sensor.networks.as.well..e.network.area.is.rst.divided.into.xed.zones.
and.forms.a.virtual.grid,.see.Figure.4.7..Inside.each.zone,.nodes.collaborate.with.each.other.to.play.dierent.
roles..GAF.conserves.energy.by.turning.o.unnecessary.nodes.in.the.network.without.aecting.the.level.of.
routing.delity..Each.node.uses.its.GPS-indicated.location.to.associate.itself.with.a.point.in.the.virtual.grid..
Nodes.associated.with.the.same.point.on.the.grid.are.considered.equivalent.in.terms.of.the.cost.of.packet.
routing..GAF.can.substantially.increase.the.network’s.lifetime.as.the.number.of.nodes.increases.
ere
.are.three.states.dened.in.GAF:.discovery,.for.determining.the.neighbors.in.the.grid;.active,.
reecting.participation.in.routing;.and.sleep,.when.the.radio.is.turned.o..In.order.to.handle.mobility,.
each.node.in.the.grid.estimates.its.leaving.time.and.sends.this.to.its.neighbors..e.sleeping.neighbors.
adjust.their.sleeping.time.accordingly.in.order.to.keep.the.routing.delity..Before.the.leaving.time.of.the.
active.node.expires,.sleeping.nodes.wake.up.and.one.of.them.becomes.active..GAF.is.implemented.both.
for.nonmobility.(GAF.basic).and.mobility.(GAF-mobility.adaptation).of.nodes.
In
.Table.4.2,.there.is.a.comparison.of.the.three.routing.protocols.for.WSNs.presented.in.this.section..
e.routing.algorithm.used.and.the.family.protocol.of.every.routing.protocol.is.summarized.
4.6 Conclusions
As.a.general.rule,.we.can.say.that.while.proactive.protocols.are.very.ecient.when.the.network.is.small.
with.high.trac.and.low.mobility,.the.constant.propagation.of.routing.information.generally.has.a.
negative.eect.on.the.eciency.of.these.protocols..On.the.other.hand,.reactive.protocols.create.a.greater.
latency.due.to.delays.in.route.discovery.to.the.destination..On-demand.routing.protocols.are.suitable.for.
low.trac.load.and/or.moderate.mobility..With.high.mobility,.ooding.of.data.packets.may.be.the.only.
option,.and.it.is.because.of.this.that.new.solutions.such.as.hybrid.protocols.are.being.sought.in.the.hope.
of.achieving.the.best.of.both.systems.
m
j
8
5
2 3
6
9
c
f
h
i
n
e
b
k
d
a
g
Base station
7
4
1
l
FIGURE 4.7 Example.of.virtual.grid.in.GAF.
TABLE 4.2 Routing.Protocols.in.Wireless.Ad.Hoc.Networks
Routing.Protocols.in.Wireless.Ad.Hoc.Networks
OLSR TBRPF DSR AODV DYMO
Routing
.
algorithm
Link.state Link.state Source.
routingbased
Distance.
vector
Source.
routingbased
Routing
.protocol.
family
Proactive Proactive Reactive Reactive Reactive
© 2011 by Taylor and Francis Group, LLC
4-14 Industrial Communication Systems
In.conclusion,.although.there.now.exists.a.wide.variety.of.protocols.developed.for.wireless.networks,.
non
e
.rep
resents
.the.bes
t
.sol
ution
.for.all.net
work
.app
lications
.and.con
texts,
.and.it.is.for.thi
s
.rea
son
.tha
t
.
rou
ting
.pr
otocols
.co
ntinue
.to.be.th
e
.su
bject
.of.in
tense
.st
udy
.at.pr
esent.
acknowledgment
is.work.was.supported.by.the.MCyT.(Spanish.Ministry.of.Science.and.Technology).under.the.projects.
TSI
2007-66637-C02-01/02,
.wh
ich
.ar
e
.pa
rtially
.fu
nded
.by.FE
DER.
abbreviations
AODV. Ad.hoc.on-demand.distance.vector
BS
. Bas
e
.st
ation
CH
. Clu
ster
.he
ad
DSDV
. Des
tination-sequenced
.di
stance-vector
DSR
. Dyn
amic
.so
urce
.ro
uting
DYMO
. Dyn
amic
.MA
NET
.on
-demand
ETSI
. Eur
opean
.Te
lecommunications
.Sta
ndards
.In
stitute
GAF
. Geo
graphic
.ad
aptive
.d
elity
GPRS
. Gen
eral
.pa
cket
.ra
dio
.se
rvice
GSM
. Glo
bal
.sy
stem
.fo
r
.mo
bile
.co
mmunication
HiperLAN
. Hig
h
.pe
rformance
.ra
dio
.LA
N
IETF
. Int
ernet
.en
gineering
.ta
sk
.fo
rce
LEACH
. Low.en
ergy
.ad
aptive
.cl
ustering
.hi
erarchy
MANET
. Mob
ile
.ad.ho
c
.ne
tworks
MPR
. Mul
tipoint
.re
laying
OLSR
. Opti
mized
.li
nk-state
.ro
uting
.pr
otocol
QoS
. Qua
lity
.of.se
rvice
RREP
. Rou
te
.re
ply
RREQ
. Rou
te
.re
quest
RTS/CTS
. Request.to.send/clear.to.send
SNIR
. Sig
nal
.to.no
ise
.an
d
.in
terference
.ra
tio
SPIN
. Sen
sor
.pr
otocols
.fo
r
.in
formation
.vi
a
.ne
gotiation
TBRPF
. Top
ology
.di
ssemination
.ba
sed
.on.re
verse
.pa
th
.fo
rwarding
TTL
. Tim
e-to-live
UMTS
. Uni
versal
.mo
bile
.te
lecommunications
.sy
stem
WLAN
. Wire
less
.lo
cal
.ar
ea
.ne
tworks
WMAN
. Wire
less
.me
tropolitan
.ar
ea
.ne
tworks
WMN
. Wire
less
.me
sh
.ne
twork
WPAN
. Per
sonal
.ar
ea
.ne
tworks
WSN
. Wire
less
.se
nsor
.ne
twork
WWAN
. Wire
less
.wi
de
.ar
ea
.ne
tworks
references
[AESSM]. IEEE. 802.11s. Task. Group,. Dra. Amendment. to. Standard. for. Information. Technology—
Telecommunications
. and. Info
rmation
. Exc
hange
. betw
een
. Syst
ems-LAN/MAN
. Spe
cic
.
Req
uirements.
.Par
t
.11:.Wire
less
.Medi
um
.Access.Con
trol
.(MAC).and.physic
al
.lay
er
.(PHY).spe
ci-
cations.
.Am
endment:
.ESS.Mes
h
.Net
working,
.IEEE.P802.11s/D3.O,.Ma
rch
.2009.
© 2011 by Taylor and Francis Group, LLC
Routing in Wireless Networks 4-15
[AK04].Al-Karaki,.J.N..and.Kamal,.A.E.,.Routing.techniques.in.wireless.sensor.networks:.A.survey..IEEE
Wireless Communications,
.11(6),.6–28,.2004.
[AWD04]
.Abo
lhasan,
.M.,.Wyso
cki,
.T.,.and.Dut
kiewicz,
.E.,.A.rev
iew
.of.rou
ting
.pro
tocols
.for.mob
ile
.ad.
hoc.net
works.
.Jo
urnal Ad Hoc Networks,
.2,.1–22,.2004.
[AWW05]
.Aky
ildiz,
.I.F.,.Wan
g,
.X.,.and.Wan
g,
.W.,.Wire
less
.mesh.netw
orks:
.A.surv
ey.
.Com
puter Networks
and ISDN Systems,
.47(4),.445–487,.Ma
rch
.2005.
[AY05]
.Akka
ya,
.K..and.Youni
s,
.M.,.A.surv
ey
.on.rou
ting
.pro
tocols
.for.wire
less
.sens
or
.netw
orks.
.Jou
rnal
Ad Hoc Networks,
.3(3),.325–349,.2005.
[BC
GS04]
.Bas
agni,
.S.,.Con
ti,
.M.,.Gior
dando,
.S.,.and.Sto
jmenovic,
.I.,.Mob
ile Ad Hoc Networking,
.IEEE.
Pres
s
.&.Wi
ley
.In
ter-Science,
.Ne
w
.Yo
rk,
.2004.
[C
hCL03]
.Chl
amtac,
.I.,.Con
ti,
.M.,.and.Liu
,
.J.,.Mob
ile
.ad.hoc.net
working:
.Imp
eratives
.and.cha
llenges,
.
Ad
Hoc Network Journal,
.1(1),.Ja
nuary–March
.2003.
[C
hP08]
.Cha
keres,
.I.D
.
.and.Per
kins,
.C.E
.,
.Dyn
amic
.MAN
ET
.on-
demand
.(DY
MO)
.rou
ting
.pro
tocol.
.Int
ernet
.
Dra
.ver
sion
.21,.IET
F,
.Jul
y
.26,.201
0.
[CJ03]
.Cl
ausen,
.T..an
d
.Jacq
uet,
.P.,.Op
timized
.Lin
k
.St
ate
.Ro
uting
.Pr
otocol.
.RFC.3626,.Oc
tober
.2003.
[CM99]
.Cor
son,
.S..and.Mack
er,
.J.,.Mob
ile
.Ad.Hoc.Netw
orking
.(MANET):.Rou
ting
.Pro
tocol
.Perf
ormance.
.
Iss
ues
.an
d
.Eva
luation
.Co
nsiderations.
.RFC.2501,.Jun
e
.1999.
[D
RL03]
.Dom
ingo,
.M.C
.,
.Rem
ondo,
.D.,.and.Leo
n,
.O.,.A.sim
ple
.rou
ting
.sch
eme
.for.imp
roving
.ad.hoc.
net
work
. sur
vivability.
. GLO
BECOM 2003-IEEE Global Telecommunications Conference,
. 22(
1),
.
718–723,.December.2003.
[HC
hB00]
.Heinzelm
an,
.W.,.Cha
ndrakasan,
.A.,.and.Bal
akrishnan,
.H.,.Energ
y-ecient
.communic
ation
.
pro
tocol
.for.wire
less
.microsen
sor
.netw
orks.
.In.Pro
ceeding 33rd Hawaii International Conference of
System Science,
.Ma
ui,
.HI,.Ja
nuary
.4–7,.2000.
[HKB99]
.Heinzelm
an,
.W.R.,.Kuli
k,
.J.,.and.Bal
akrishnan,
.H.,.Ada
ptive
.pro
tocols
.for.infor
mation
.diss
emi-
nation
.in.wire
less
.sens
or
.netw
orks.
.In.Mob
icom 1999,
.Sea
ttle,
.WA,.Augus
t
.15–20,.1999,.pp..174–185.
[JHM07]
.John
son,
.D.,.Hu,.Y.,.and.Mal
tz,
.D.,.e.Dyn
amic
.Sour
ce
.Rou
ting
.Pro
tocol
.(DSR).for.Mob
ile
.Ad.
Hoc.Net
works
.fo
r
.IPv4..RFC.4728,.Fe
bruary
.2007.
[J
M01]
.Joh
nson,
.D.B
.,
.Mal
tz,
.D.A
.,
.and.Bro
ch,
.J.,.DSR
:
.e.dyn
amic
.sou
rce
.rou
ting
.pro
tocol
.for.mul
ti-hop
.
wir
eless
.ad.hoc.net
works.
.In.C.E
.
.Per
kins
.(Ed
.),
.Ad
Hoc Networking,
.Add
ison-Wesley,
.Rea
ding,
.MA,.200
1.
[JM96]
. John
son,
. D.B.. and. Mal
tz,
. D.A.,. Dyn
amic
. sour
ce
. rou
ting
. in. ad.hoc. wire
less
. netw
orks.
. In. T..
Imielin
ski
.and.H..Kor
th
.(Eds.),.Mob
ile Computing,
.Klu
wer
.Academic.Publi
shers,
.Dor
drecht,
.the.
Neth
erlands,
.1996.
[J
MC01]
.Jac
quet,
.P.,.Muh
lethaler,
.P.,.Cla
usen,
.T.,.Lao
uiti,
.A.,.Qay
yum,
.A.,.and.Vie
nnot,
.L.,.Opt
imized
.lin
k
.
sta
te
.rou
ting
.pro
tocol
.for.ad.hoc.net
works,
.In.IEE
E INMIC 01,
.Lah
ore,
.Pak
istan,
.Dec
ember
.28–
30,
.200
1.
[LMAN04]
. IEE
E
. Std. 802
.16-2004
. (Re
vision
. of. IEE
E
. Std. 802
.16-2001),
. IEE
E
. Sta
ndard
. for. Loc
al
.
and.Met
ropolitan
.Are
a
.Net
works
.Par
t
.16:.Air.Int
erface
.for.Fix
ed
.Bro
adband
.Wir
eless
.Acc
ess
.
Sys
tems.
. IEE
E
. Com
puter
. Soc
iety
. and. IEE
E
. Mic
rowave
. The
ory
. and. Tec
hniques
. Soc
iety.
.
Spo
nsored
.by.the.LAN
/MAN
.Sta
ndards
.Com
ittee,
.New.Yor
k,
.Oct
ober
.200
4.
[M95]
. Moy
,
. J.,. Link-s
tate
. rou
ting.
. In. Ste
enstrup,
. M.E.. (Ed.),. Rou
ting in Communications Networks,
.
Pren
tice
.Ha
ll,
.Eng
lewood
.Clis,.NJ,.1995,.pp
.
.135–157.
[M
ZKD04]
.Lee
,
.M.J
.,
.Zhe
ng,
.J.,.Ko,.Y-B
,
.Shr
estha,
.D.M
.,
.Eme
rging
.sta
ndards
.for.wir
eless
.mes
h
.tec
hnology.
.
Wir
eless Communications, IEEE,
.13(
2),
.56–
63,
.200
4.
[OTL04]
.Ogier,.R.,.Temp
lin,
.F.,.and.Lew
is,
.M.,.Top
ology
.Diss
emination
.Bas
ed
.on.Rev
erse-Path
.For
warding
.
(TBRPF)..RFC.3684..Fe
bruary
.2004.
[P
99]
.Per
kins,
.C.E
.,
.Mob
ile
.net
working
.in.the.int
ernet.
.Mob
ile Networks and Applications,
.3(4
),
.319
–334,
.199
9.
[PBD03]
.Perk
ins,
.C.,.Beldin
g-Royer,
.E.,.Das,.S.,.Ad.hoc.On-Dema
nd
.Dist
ance
.Vec
tor
.(AOD
V)
.Rou
ting.
.
RFC.3561,.Ju
ly
.2003.
[PR99]
.Perk
ins,
.C.E..and.Roy
er,
.E.M.,.Ad.hoc.on.deman
d
.dist
ance
.vec
tor
.rou
ting.
.In.Pro
ceedings of the
2nd IEEE Workshop on Mobile Computing Systems and Applications,
.New.Orlea
ns,
.LA,.Feb
ruary
.
1999,.pp
.
.90–100.
© 2011 by Taylor and Francis Group, LLC
4-16 Industrial Communication Systems
[RP00]. Royer,. E.M.. and. Perkins,.C.E.,. An. implementation.study.of. the. AODV. routing. protocol.. In.
Pro
ceedings of the IEEE Wireless Communications and Networking Conference,
. Chica
go,
. IL,.
Sept
ember
.2000.
[R
P99]
.Roy
er,
.E.M
.
.and.Per
kins,
.C.E
.,
.Mul
ticast
.ope
ration
.of.the.ad.hoc.on-
demand
.dis
tance
.vec
tor
.
rou
ting
.pr
otocol.
.In.Pr
oceedings of MobiCom ‘99,
.Se
attle,
.WA,.Augu
st
.1999,.pp
.
.207–218.
[SWL03]
.Son
g,
.J.-H.,.Won
g,
.V.W.S.,.and.Leung
,
.V.C.M.,.Ecient.on-dema
nd
.rou
ting
.for.mob
ile
.ad.hoc.
wire
less
.access.netw
orks.
.GLOBEC
OM 2003-IEEE Global Telecommunications Conference,
.22(1),.
558–563,.De
cember
.2003.
[TG5]
.IEEE.802.15.WPANT
M
.Ta
sk
.Gr
oup
.5.(TG5)..ht
tp://ieee802.org/15/pub/TG5.html
[WMAC03]
. IEEE. 802.15.4,. Wire
less
. Medi
um
. Access. Con
trol
. (MAC). and. Physic
al
. Lay
er
. (PHY).
Spe
cications
. for. Low-R
ate
. Wire
less
. Pers
onal
. Are
a
. Netw
orks
. (LRWPAN
s),
. IEEE,. New. Yor
k,
.
Oct
ober
.2003.
[X
HE01]
.Xu,.Y.,.Hei
demann,
.J.,.and.Est
rin,
.D.,.Geo
graphy-informed
.ene
rgy
.con
servation
.for.ad-
hoc
.
rou
ting.
.In.Pro
ceeding 7th Annual ACM/IEEE International Conference Mobile Computers and
Networks,
.Rom
e,
.Ita
ly,
.Jul
y
.200
1,
.pp..70–
84.
© 2011 by Taylor and Francis Group, LLC
5-1
5.1 Interoperating Components
In.distributed.automation.systems,.automation.devices.like.sensors,.actuators,.and.controllers.are.
conn
ected
.thro
ugh
.an.indu
strial
.comm
unication
.syst
em
.(Fig
ure
.5.1)
.
.Auto
mation
.syst
ems
.of.the.past.
were.free
ly
.con
gurable,
.allo
wing
.the.syst
em
.to. be. adap
ted
.spec
ically
.to.one.give
n
.inst
allation.
.
Alth
ough
.this.coul
d
.alre
ady
.be.done.in.sow
are
.(and.not.by.conn
ecting
.wire
s
.dire
ctly),
.it.was.stil
l
.
nece
ssary
.that.ever
y
.syst
em
.had.to.be. prog
rammed
.indi
vidually,
.whic
h
.resu
lted
.in.a.uniq
ue
.and.
nonr
eusable
.inst
allation.
.Cost
s
.for.inte
grating
.mult
iple
.indu
stries,
.main
tenance,
.and.exte
nsions
.of.
exis
ting
.syst
ems
.were.cons
iderable
.and.requ
ired
.well
-educated
.expe
rts.
.When.auto
mation
.syst
ems
.
beca
me
.more.soph
isticated
.and.cons
isted
.of.a.cons
iderable
.amou
nt
.of.comm
unicating
.comp
onents,
.
this.eor
t
.beca
me
.too.high.and.a.new.solu
tion
.had.to.be.foun
d.
.Inst
ead
.of.prog
ramming
.each.comp
o-
nent
.indi
vidually,
.an.exis
ting
.den
ition
.has.sinc
e
.been.used.as.a.temp
late
.and.repr
oduced
.for.as.many.
comp
onents
.(or.node
s,
.as.they.are.call
ed
.from.comm
unication
.poin
t
.of.view
)
.as.need
ed.
.e.abil
ities
.
(i.e
.,
.the.func
tions)
.of.each.comp
onent
.are.stan
dardized,
.the.node
s
.do.not.need.to.be.prog
rammed,
.
they.mer
ely
.need.to.be.con
gured.
.ese.fun
ctions
.can.be.cou
pled,
.thus.cre
ating
.the.func
tionality
.of.
the.whol
e
.syst
em.
e
.user
s
.do.not.need.to.know.abou
t
.the.inte
rnal
.desig
n
.of.a.node
;
.they.only.have.to.know.abou
t
.the.
func
tions
.that.a.node.oer
s.
.Well
-known
.func
tions
.are,.for.exam
ple,
.actu
ators,
.sens
ors,
.and.cont
rollers,
.
each.of.whic
h
.can.be.oer
ed
.by.a.sepa
rate
.node.(or.all.inte
grated
.into.one.comp
lex
.node
).
.Inst
ead
.of.
know
ing
.the.whol
e
.comp
onent,
.the.user.only.has.to.know.the.inte
rface
.of.the.comp
onent,
.that.is,.the.
vari
ables
.tha
t
.it.oe
rs
.and.the
ir
.beh
avior.
When
.conguring.such.a.system,.the.user.has.to.connect.the.outputs.of.one.function.block.with.the.
inpu
ts
.of.othe
r
.func
tion
.bloc
ks.
.Physi
cal
.data.tran
smission
.does.not.requ
ire
.dedi
cated
.wire
s,
.but.can.
be.done.on.a.shar
ed
.bus,.wher
e
.mess
ages
.are.tran
sported
.betw
een
.node
s
.using.dist
inct
.addr
esses
.for.
send
er
.to.rec
eiver
.in.the.mes
sage.
e
.goal.is.to.get.a.syst
em
.that.can.easil
y
.be.put.into.oper
ation,
.pref
erably
.with.litt
le
.(or.even.no).
comm
issioning.
.Whil
e
.the.adva
ntages
.are.obvi
ous,
.one.also.has.to.consi
der
.how.to.achi
eve
.coop
erating
.
comp
onents.
.is.is.an.issu
e
.on.mult
iple
.laye
rs.
.Whil
e
.befo
re
.it.was.suc
ient
.to.chec
k
.for.the.corr
ect
.
physi
cal
.para
meters
.like.volt
age
.befo
re
.conn
ecting
.two.comp
onents
.by.a.dedi
cated
.wire
,
.we.now.have.
5
Proles and
Interoperability
5.1. Interoperating.Components............................................................. 5-1
5.2
. Appl
ication
.of.Pro
les......................................................................5-4
Function.Blocks.of.IEC.61499. •. Functional.Proles.inLON. •. .
Logical.Nodes.of.the.IEC.61850
5.3. Achieving.Interoperability...............................................................5-6
References....................................................................................................... 5-7
Gerhard Zucker
Vienna University
of Tec
hnology
Heinz Frank
Reinhold-Würth-University
© 2011 by Taylor and Francis Group, LLC

5-2 Industrial Communication Systems
to.consider.not.only.the.physical.connection.but.also.dierent.other.levels..is.ability.to.cooperate.can.
be.described.by.dierent.terms.
Two
.components.need.to.have.identical.properties.to.reach.a.certain.level.of.cooperation..ese.ve.
properties.are
. 1..Identical.communication.protocol.on.layer.1–7
. 2.. Usage.of.services.by.the.application
. 3.. Denition.of.the.interface.variables.regarding,.for.example,.data.type,.resolution,.or.measuring.unit
. 4.. Semantics.of.the.application.(algorithms,.amount,.and.meaning.of.interface.variables)
. 5..Dynamic.behavior.regarding,.for.example,.control.parameters.or.lter.constants
Depending
.on.the.number.of.properties.that.a.system.fullls,.we.can.assign.the.following.terms.(Table.5.1):
Compatible
.and.interconnectable.require.loosely.dened.communication.agreements;.the.compo-
nents
.must.not.interfere.with.each.other,.which.translate.to.requirements.on.the.physical.channel,.for.
example,.voltage.level.or.bitrates..Interworkable.systems.need.to.have.an.agreement.on.the.meaning.of.
transmitted.information.in.terms.of.data.types.(e.g.,.how.many.bytes.make.up.a.number?,.is.it.an.inte-
ger
.or.a.oating.point?).and.also.have.to.dene.error.values.in.case.a.value.cannot.be.transmitted.(e.g.,.
too.big.or.sensor.is.broken)..An.example.for.this.level.of.cooperation.can.be.found.in.local.operating.
network.(LON).[1],.where.standard.network.variable.types.(SNVTs).have.been.dened..For.example,.the.
type.snvt_temp.denes.temperature,.which.can.be.used.for.transmitting.common.temperatures.with.
the.following.properties:
•
. Data.type:.unsigned.long.integer
•
. Total.length:.two.bytes
•
. Measuring.unit.and.range:.degree.Celsius.ranging.from.−274°C.to.+6279.5°C
•
. Resolution:.0.1°C
On
.this.level,.the.user.of.the.system.can.be.sure.that.the.components.do.not.interfere.with.each.
other,.that.they.can.exchange.data,.and.also.have.the.same.understanding.of.the.interpretation.of.
FB
(function i)
Function-
block (FB)
Function-
block (FB)
FB
(function i)
Engineering
tool A
Engineering
tool B
Portability
Configurability
Automation device x Automation device y
Interoperability
Industrial
communication system
FIGURE 5.1 Distributed.automation.system.
TABLE 5.1 Term.Denitions.by.Properties.
1–5.Given.above
Incompatible None
Compatible 1
Interconnectable 1 2
Interworkable 1 2 3
Interoperable 1 2 3 4
Interchangeable 1 2 3 4 5
© 2011 by Taylor and Francis Group, LLC
Proles and Interoperability 5-3
these.data..However,.this.does.not.ensure.that.the.components.can.also.cooperate.seamlessly..In.addi-
tion
.to.an.understanding.of.values,.the.components.need.to.be.designed.toward.other.requirements..
For.one,.there.is.the.direction.from.where.communication.is.triggered:.A.node.can.either.send.its.
information.regularly.to.any.component.that.is.interested.in.the.value.or.it.can.wait.until.another.
component.queries.it.for.its.value..A.controller.component.on.the.other.side.has.to.implement.error.
behavior.in.case.a.required.value.cannot.be.retrieved,.for.example,.due.to.communication.failure.or.
failure.of.a.sensor.component..In.some.cases,.it.may.be.necessary.to.calibrate.a.sensor.component..
A.controller.component.has.to.consider.the.fact.that.during.calibration,.the.component.is.unable.
to.deliver.a.reliable.measurement..ese.issues.are.beyond.mere.communication;.they.relate.to.the.
functionality.of.a.component.
In
.an.interoperable.system,.the.devices.from.dierent.suppliers.have.to.be.able.to.exchange.infor-
mation
.and.to.use.the.information.that.has.been.exchanged.[1]..If.a.system.is.capable.of.communi-
cating
.and.exchanging.data,.it.is.syntactically.interoperable..When.a.device.is.able.to.process.such.
data.with.useful.results,.it.is.semantically.interoperable..To.achieve.interoperable.or.interchangeable.
components,.the.functions.of.the.components.have.to.be.standardized..is.includes.dening.groups.
of.components,.for.example,.sensor,.actuator.or.controller.and.their.properties,.for.example,.their.
time.response..In.LON,.this.level.of.cooperation.is.achieved.by.dening.functional.proles..On.this.
level,.it.is.possible.to.achieve.true.interoperability,.which.means.that.components.(e.g.,.from.dier-
ent
.manufacturers).can.be.combined.to.one.system.to.cooperatively.provide.the.system.function-
ality.
.Components.can.be.replaced.(also.by.components.of.other.manufacturers).without.aecting.
functionality.
e
.function.blocks.shown.in.Figure.5.1.consist.of.programs,.data,.and.communication.services.
(Figure.5.2)..To.ensure.interoperability.between.distributed.function.blocks.for.one.control.function,.
we.have.to.standardize.the.functions,.data,.and.communication.services.of.the.function.blocks.in.a.
functional.prole.
Users
.benet.from.standardized.components.by.being.able.to.use.components,.which.can.be.manu-
factured
.by.dierent.companies..Manufacturers.on.the.other.side.can.extend.their.market.segment.
by.oering.only.parts.or.single.components.of.a.system.and.do.not.have.to.oer.all.components.
of.a.system..Generally,.standardized.distributed.systems.that.are.interoperable.have.the.following.
advantages:
•
. Automation.systems.can.be.built.up.with.autonomous.subsystems.
•
. Autonomous. subsystems. can. be. manufactured. and. tested. independently. from. the. complete.
system.
•
. Subsystems.from.dierent.manufacturers.can.be.integrated.
•
. Existing.systems.can.be.easily.extended.with.new.automation.devices.
•
. Integration.of.automation.devices.can.be.done.by.conguration.
Automation device x
Communication services
Program Data
Function block n.1
Industrial communication system
Functional profile
Automation device x
Communication services
Program
Data
Function block n.2
Specif.
func.
n.1
Specif.
func.
n.2
FIGURE 5.2 Distributed.automation.function.
© 2011 by Taylor and Francis Group, LLC
5-4 Industrial Communication Systems
5.2 application of Proles
is.section.describes.some.examples.for.functional.proles.as.they.are.covered.by.dierent.standards.
5.2.1 Function Blocks of IEC 61499
Distributed.systems.used.for.automation.have.been.standardized.in.the.IEC.61499.standard..is.stan-
dard
.describes.an.architecture.for.communication.networks.and.processes.that.can.be.used.for.design-
ing
.system.applications..Interoperability.is.a.central.concept.that.has.to.be.achieved..e.core.component.
in.IEC.61499.is.a.Function.Block,.which.is.a.module.that.has.a.certain.function.and.provides.the.output.
of.this.function.based.on.its.input.to.other.components.using.an.interface..is.interface.consists.of.
both.Event.Inputs/Outputs.(I/Os).and.Data.I/Os..Internally,.the.Function.Block.executes.an.algorithm,.
which.processes.input.data.and.produces.output.data,.but.this.algorithms.is.not.visible.from.the.outside..
Output.data.can.be.transferred.to.other.Function.Blocks.and.become.input.data.for.the.other.block..
Basic.Function.Blocks.are.the.most.elementary.blocks;.Composite.Function.Blocks.can.be.composed.
of.multiple.Basic.Function.Blocks..Using.these.Function.Blocks,.it.is.possible.to.design.a.system.with.a.
high.degree.of.modularity..IEC.61499.is.intended.to.describe.a.generic.modelling.approach.for.control.
applications.that.are.distributed.over.multiple.components.and.thus.have.to.be.built.in.a.modular.way..
Another.aspect.of.modularity.is.the.fact.that.information.ow.and.control.ow.are.separated.by.means.
of.Event.I/O.and.Data.I/O.
5.2.2 Functional Proles in LON
LON.was.developed.for.building.automation..It.makes.it.possible.to.distribute.the.automation.functions.
in,.for.example,.light.control,.sunblind.control,.heating,.ventilation,.and.air.conditioning.all.over.the.
buildings.[2].
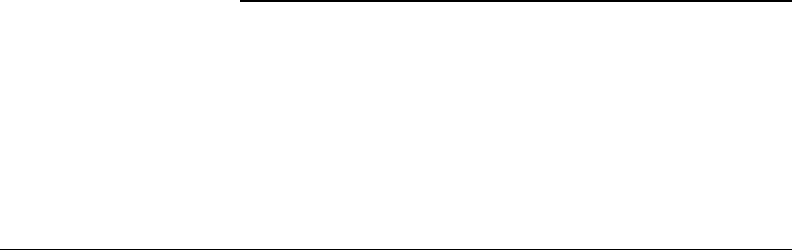
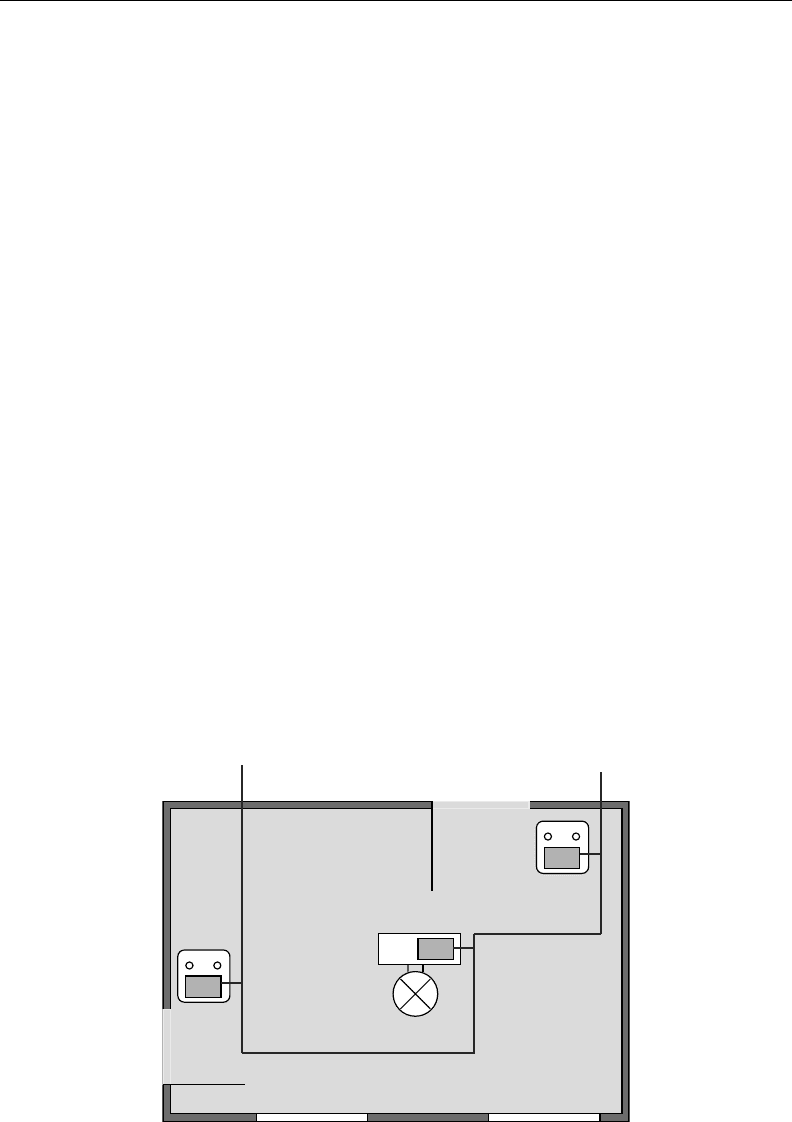
Figure
.5.3.shows.a.simple.example.for.a.light.control..It.is.possible.to.switch.a.lamp.on.and.o.from.
two.dierent.switches..Both.sensors.(i.e.,.the.switches).and.the.actuator.have.their.own.microcomputer.
(Neuron-Chip)..e.function.for.the.light.control.is.distributed.on.these.three.microcomputers.
Lamp actuator E1
Switch S1
Switch S2
µC
µC
µC
LON
FIGURE 5.3 Example.for.a.simple.LON.network.
© 2011 by Taylor and Francis Group, LLC
Proles and Interoperability 5-5
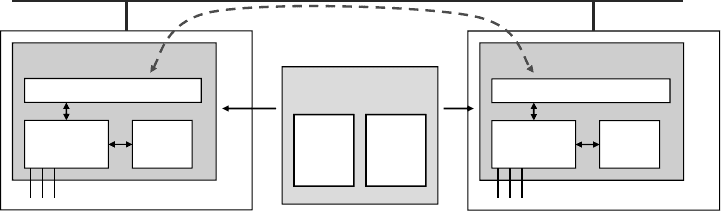
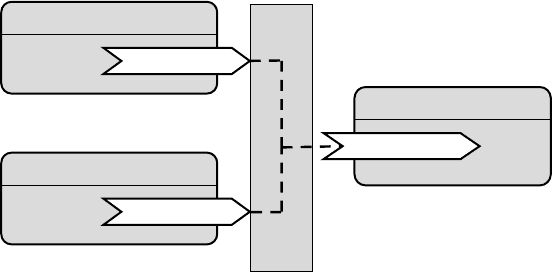
e.standardization.organization.for.LON.(LonMark).has.specied.“functional.proles”.for.such.a.
light.control.[3]..For.the.application.according.to.Figure.5.3,.two.functional.proles.have.to.be.considered:
•
. e.switch.prole.(standardized.as.No..3200).denes.the.function,.the.conguration.parameters,.
and.the.network.variables.(the.types.of.which.are.called.SNVTs,.see.below).that.are.required.in.
a.switch.(Figure.5.4)..If.a.user.presses.the.le.button.on.the.switch,.the.microcontroller.writes.an.
“ON”-information.into.the.network-variable.nvoSwitch;.if.the.right.button.is.pressed,.it.writes.
an.“OFF”-information.into.this.variable..e.representation.of.these.values.in.the.variable.is.
standardized.with.so-called.SNVTs..e.nvoSwitch-variable.is.an.output.variable.and.can.be.
connected.to.other.input.variables.at.other.nodes..So.each.time.this.variable.is.changed,.its.value.
is.transmitted.over.the.LON.network.to.one.or.more.other.automation.devices.
Figure
.5.4.shows.the.implementation.of.the.switch.prole.on.two.automation.devices,.which.
are.switch.S1.and.switch.S2..In.this.network,.the.value.from.the.nvo-Switch.values.must.be.trans-
mitted
.over.the.LON.to.the.lamp.actuator.
•
. e.lamp-actuator-prole. (standardized. as. No..3040).denes. the. function,.the. conguration.
parameters,.and.the.network.variables.that.are.required.in.a.lamp.actuator.(Figure.5.4)..A.net-
work
.variable.nviLampValue,.which.is.an.input.variable,.is.required..If.an.“ON”-information.is.
received.in.this.input.value.from.a.switch,.the.lamp.actuator.switches.the.lamp.on;.accordingly,.
the.lamp.is.switched.o,.if.an.“OFF”-information.is.received..Figure.5.4.shows.the.implementa-
tion
.of.one.lamp-actuator-prole.on.one.automation.device,.which.is.the.lamp.actuator.E1.
In
.LON,.the.integration.of.the.automation.devices.is.done.with.integration.tools..With.such.tools,.the.
structure.of.the.network.and.the.so-called.bindings.must.be.congured..A.binding.denes.the.connec-
tion
.of.input.variables.to.output.variables.
5.2.3 Logical Nodes of the IEC 61850
e.IEC.61850.standard.was.developed.for.the.communication.of.devices.in.substations.of.electrical.
power.grids.and.for.distributed.energy.resources.[4–6].
For
.generic.functions.like.supervision.and.control.of.transformers,.switches,.circuit.breakers,.and.
metering.devices,.so-called.logical.node.classes.were.standardized.
For
.example,.the.logical.node.class.for.a.metering.device.(abbrivated.as.MMTR.according.to.IEC.
61850).includes.the.following.data:
•
. Health.status.of.the.metering.device.(EEHealth)
•
. Net.apparent.energy.(TotVAh)
Switch #3200
nvoSwitch
Lamp actuator #3040
nviLampValue
Lamp actuator E1
Switch S1
Switch #3200
nvoSwitch
Switch S2
LON
FIGURE 5.4 Nodes.and.functional.proles.
© 2011 by Taylor and Francis Group, LLC