Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
702
−+ + =
23
0xkx xxω ,
(24.3.10)
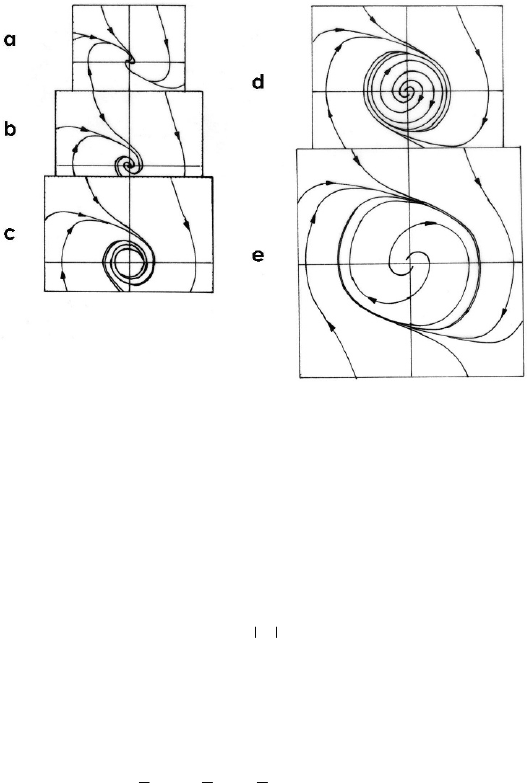
which has a fixed point at the origin; there appears a Hopf bifurcation when
k
passes
from negative to positive values. Some phase portraits for various values of
k are given
in Fig. 24.35. If
<−2k , then the origin is an asymptotically stable node (Fig. 24.35a),
obtaining a stable spiral for
=−2k (Fig. 24.35b). For = 0k (Fig. 24.35c) we obtain
the bifurcation, the convergence being very weak, while for
> 0k we get an instable
spiral, the flux tending to the limit circle to which it gives rise (Fig. 24.35d). If
> 2k
,
then the origin is an instable node and the limit circle continues to increase
(Fig. 24.35e). Changing the sense of the flux, we pass from a phase portrait of a Hopf
supercritical bifurcation to a phase portrait of a Hopf subcritical bifurcation.
Fig. 24.35 Phase portraits for the non-linear differential equation (24.3.10): 2k <− ,
asymptotically stable node (a); 2k =− , stable spiral (b); 0k = , bifurcation (c);
0k >
, instable spiral (d);
2k >
, instable node (e)
In connection with the Hopf bifurcation can be put the Neimark bifurcation (second
bifurcation of Hopf), which describes the continuous increase of a second mode of
oscillation, starting from a limit circle.
The possibility of appearance or of disappearance of a periodic solution of the
differential equation
( , ), , , 0
n
Dccλα=∈⊂<>
xfx x
,
(24.3.11)
where
f is an analytic real function definite on ×−[,]Dcc, is put in evidence by
Theorem 24.3.1 (Hopf). Let be an analytic real vector function
g
, so that
((), )λλ= 0fg ; we express fx(, )λ in the form
(, ) (, ), ()
λ
λλλ
∗
=+ =−fx Lx f x x x g ,
(24.3.12)
Dynamical Systems. Catastrophes and Chaos
703
where
L
λ
is an n -dimensional square real matrix, which depends only on λ , while
∗
fx(,)λ is the non-linear part of fx(, )λ . We assume that there exist only two
complex conjugate eigenvalues
(), ()αλ αλ of
L
λ
with the properties =Re (0) 0α
and
≠Re[d (0)/ d ] 0αα. In this case, the system of differential equations (24.3.11)
has a periodic solution
x(, )t ε of period ()T ε with = ()λλε, so that
(0) , ( ,0) (0)tλλ==xg and ≠xg(, ) ( ( ))t ελεfor any parameter ≠ 0ε sufficiently
small; moreover,
()λε , x(, )t ε and ()T ε are analytical in = 0ε , while
=(0) 2 / | Im (0) |T πα. These “small” periodic solutions exist only for one of the
three cases: for
< 0λ or for > 0λ or for = 0λ .
We mention that the theorem does not specify how “small” must be
ε .
The Hopf bifurcation allows – as well – the generation of periodic solutions. Thus, if
a position of equilibrium is stable for
<
0
λλ
and become instable for
>
0
λλ
, then can
appear a stable position of equilibrium; the orbit is developed starting from a point in
the phase plane (for
=
0
λλ
) to closed curves, by continuous deformations, as λ is
greater than
=
0
λλ
. This is the soft generation.
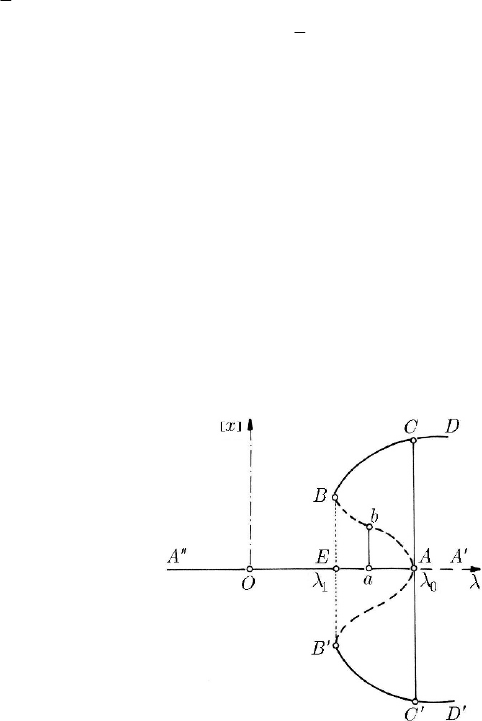
Fig. 24.36 Hard generation of a periodic motion
If the generation of the periodic motion takes place by a jump, in the sense that the
amplitudes of the periodic motion have – from the very beginning – relative great finite
values (not increasing continuously from zero to a finite value, as far as
λ is increasing),
then we have to do with a hard generation. In Fig. 24.36 is represented the variation of a
variable
x[], definite in Sect. 24.2.1.1, as function of λ ; one can see that there are possible
periodic motions for
<
0
λλ
too. On the semi-straight line
′′
AA
, for which
<
0
λλ
, the
solution
=x[] 0 is stable, while on the semi-straight line
′
AA
, for which
>
0
λλ
, this one
is instable. One observes that for
>
1
λλ
a stable periodic motion is possible (the curve
BCD
or the curve
′′′
BCD
), as well as an instable periodic motion (the curve BA or the
curve
′′
BA
). We see – as well – that for λ somewhat smaller than
0
λ
, the system being in
a stable equilibrium, a periodic motion with a sufficiently great amplitude can be suddenly

MECHANICAL SYSTEMS, CLASSICAL MODELS
704
generated (the segments of a line
AC or AC
′
). It is possible that, for >
1
λλ, for
sufficiently great perturbations, the position of stable equilibrium does disappear, a periodic
motion of a sufficient great amplitude taking place, especially if
λ approaches
0
λ , even if
<
0
λλ. If λ corresponds to a point a , for a perturbation less than ab , then the system
returns to the position of equilibrium, while if the perturbation is greater than
ab , then the
system becomes – by a jump – a stable periodic motion and does no more return to the
position of equilibrium; hence, the curve
′
BAB
, which – practically – is never realized,
represents the limit between the domain of attraction of the stable position of equilibrium
EA and the domain of attraction of the periodic motion BCD (or
′′′
BCD
).
24.3.1.3 Lindstedt’s Method
Lindstedt has elaborated a numerical method to determine the periodic solutions of a
non-linear differential equation, using – in fact – the perturbations method, but
eliminating, at each stage of calculation, the secular terms which appear.
Let be thus the differential equation
+=
2
(,)xxfxxωε
,
(24.3.13)
where
ε is a small parameter and (, )fxx is a non-linear function of x and x . In the
linear case (
= 0ε ) the period of the motion is = 2/T πω; in the non-linear case
(
≠ 0ε ) we have, obviously, =+2/ ()T πω εO , hence the pulsation Ω of the
motion is of the form
=+ + +
2
0
12
...Ωω εω εω ,
(24.3.14)
with
= 2/TΩπ as unknown. It is convenient to make a change of independent
variable
= tτΩ, (24.3.15)
which – by replacing
t and 2/πΩ – leads to = 2τπ, hence to a known period.
Calculating
′′′
====
2
dd dd
,
dd dd
xx
xxx x
tt
ττ
ΩΩ
ττ
,
where we have denoted by
′
x
and
′′
x
the derivatives of the function x with respect to
the variable
τ , we may write the differential equation (24.3.13) in the form
′′ ′
+=
22
(, )xxfxxΩωεΩ
.
(24.3.13')
Assuming an expression
=+ + +
2
0
12
...xx x xεε ,
(24.3.16)

Dynamical Systems. Catastrophes and Chaos
705
where
( ), 0,1,2,...
ii
xx iτ==, we can write
()()()
222
00 0
12 1 2 12
( , ) ..., ... ... ;fx x f x x x x x xΩεεωεωεωεε
′′′′
= +++ +++ +++
introducing in (24.3.13') and taking into account (24.3.14), (24.3.16), one obtains
()
()
()
22 22
00 0 0 0 0
111 1
22 2
000
222112
32 2
000
33312123
,,
,, ,,
, , , , , , ... 0;
xx xxfx
xxfxx
xxfxxx
ωωεωω ωω
εω ω ωωω
εω ω ωωωω
′′ ′′
++ +−
⎡⎤
⎣⎦
′′
++−
⎡⎤
⎣⎦
′′
++− +=
⎡⎤
⎣⎦
equating to zero the coefficients of various powers of the small parameter, it results the
system
()
()
()
′′
+=
′′
+=
′′
+=
′′
+=
22
00 0
22
000
111 1
22
000
222112
22
000
33312123
0,
,, ,
,, ,, ,
,,, , , , ,
......................................................................
xx
xxfx
xxfxx
xxfxxx
ωω
ωω ωω
ωω ωωω
ωω ωωωω
(24.3.17)
determining thus the functions
0
12
(), (), (),...xxxτττ, as well as the pulsations
0
12
,,,...ωωω Integrating the first equation (24.3.17), one obtains a periodic solution of
period
2π ; imposing now the initial condition
00
(0) (0)xxx== as well as the
condition
000
(0) (1/ ) /xxvΩΩ
′
== , there result
0
()x τ and
0
ω . Replacing in the
second equation we obtain – by integration –
1
()x τ and
1
ω , with homogeneous initial
conditions
11
(0)0, (0)0xx
′
== (because the non-zero initial conditions have been
previously verified); in the expression of
1
()x τ appears a secular term, the coefficient of
which is equated to zero. The procedure is repeated till the (
+ 1n )th equation, resulting
=+ ++
0
1
() ( ) ( ) ... ( )
n
n
xt x t x t x tΩεΩ εΩ,
(24.3.18)
where
=+ + ++
2
0
12
...
n
n
Ωω εω εω εω.
(24.3.18')
For instance, if use Lindstedt’s method for the differential equation
++ =
3
0xx xε ,
(24.3.19)
we get (
= 3n )
()
()
352
352 52
123
() cos
32 1024
13 1
cos 3 cos 5 ,
32 128 1024
xtaaat
aa ta t
εεΩ
εεΩ εΩ
=− +
++ +
(24.3.19')
MECHANICAL SYSTEMS, CLASSICAL MODELS
706
where
=+ − = =
242
321
1 , (0) , (0) 0
8256
aaxaxΩεε
.
(24.3.19'')
24.3.1.4 Stability of Periodic Solutions
Let be the system of non-linear differential equations
=∈xxx(;),
n
ft
,
(24.3.20)
and let
()tΦ be a solution, in general non-periodical, of this system; if y is a small
perturbation, let us take
=+xy()tΦ ,
(24.3.21)
replacing then in (24.3.20). We get
()()
()
(;)
() () ; (); ...
t
Dt
ttttt
D
=
⎡⎤
+= + = + +
⎢⎥
⎣⎦
x
fx
yf y f y
x
Φ
ΦΦ Φ ,
wherefrom, taking into account that
()tΦ is a solution of the system (24.3.20), it
results (we neglect the terms in higher powers of
y )
=
⎡⎤
==
⎢⎥
⎣⎦
x
fx
yyAy
x
()
(;)
()
t
Dt
t
D
Φ
,
(24.3.20')
hence the linearized system of the initial one; formally, we can write
∫
=
A
yy
0
()
d
0
() e
t
t
ττ
.
(24.3.22)
If, for
→∞t , the exponential in (24.3.22) tends to infinite, then the solution
=x ()tΦ is instable, while, if this exponential tends to zero, then the solution is
asymptotically stable; a special study must be make in other cases.
In the case in which the system (24.3.20) is autonomous and the solutions are
periodical, the matrix A()t is periodical too and one can use Floquet’s theory (see
Sect. 24.1.1.3). In this order of ideas, one can state:
Theorem 24.3.2. Let be the linear system (24.3.20') with a periodic matrix A()t , of
period
T . The sum of the characteristic exponents is given by
+++ =
∫
A
12
0
1
... tr ( )d
t
n
T
λλ λ ττ
,
(24.3.23)
where
Atr is the trace of the matrix A .

Dynamical Systems. Catastrophes and Chaos
707
Theorem 24.3.3. Let be the autonomous non-linear system (24.3.1) which admits a
periodic solution
()tΦ , of period T , and for which the vector fx() is of class
1
C in a
domain
⊂
n
D , which contains the periodic solution too. The linearized system
=
⎡⎤
=
⎢⎥
⎣⎦
x
fx
yy
x
()
()
t
D
D
Φ
(24.3.24)
has one null characteristic exponent; if the other
− 1n characteristic exponents have a
negative real part, then the solution
()tΦ is stable.
The stability considered above is an orbital stability, in the Poincaré sense (a
solution
x()t , which starts from a neighbourhood of the system ()tΦ remains during
the motion in the same neighbourhood).
24.3.2 Global Bifurcations
The global bifurcations are these qualitative changes which take place in the
structure of orbits in an extended domain of the phase space, by a variation of the
parameters which intervene in the system of differential equations. After some general
considerations, one presents the problem of heteroclinic and homoclinic trajectories,
giving also some examples.
24.3.2.1 General Considerations
We call phase current the operator
t
Φ which, applied to the vector of state
=∈xx
0
(0)
n
, allows to obtain the solution x()t of the system of non-autonomous
equations (24.3.20) by the relation
=xx
0
()
t
t Φ .
(24.3.25)
If the system of differential equations is autonomous (we consider only such systems
in what follows), then the phase current verifies the property of translation
+
=
tt
τ
τ
ΦΦΦ.
(24.3.26)
For the point specified by the vector
=∈x
T
12
[,,..., ]
n
n
xx x , solution of the
system of autonomous equations (24.3.1), we introduce the
ω -limit point, defined by
lim ( ) ( )
t
t →∞
=xxΦω,
(24.3.27)
and the α -limit point, defined by
lim () ()
t
t →−∞
=Φαxx
.
(24.3.27')
In the case of the system of recurrence equations (24.1.77'), we – analogously – obtain

MECHANICAL SYSTEMS, CLASSICAL MODELS
708
−
→∞
=xx
1
lim ( ) ( )
n
n
f ω
(24.3.28)
−
→−∞
=xx
1
lim ( ) ( )
n
n
f α
(24.3.28')
tending to infinite by integers.
Fig. 24.37 Phase plane: critical point O, stable limit cycle
1
C
and instable limit cycle
2
C
As an example, let be in the phase plane (for the sake of simplicity we are situated in
2
) the critical point O , the stable limit cycle
1
C and the instable limit cycle
2
C . We
denote by
1
D the domain interior to the limit cycle
1
C and by
2
D the domain
contained between the two cycles (Fig. 24.37). One can notice that for all the points
situated in the domain
1
\DO, the point O is an
α
-limit point, while the limit cycle
1
C is an
ω
-limit set, while the limit cycle
2
C is an
α
-limit set (as well as for the
points external to
2
C ).
If
∈→ ∈∀∈ ⊂xx() , ,
n
UUU
τ
τ Φ ,
(24.3.29)
then
U is an invariant set for the phase current
τ
Φ . In case of the system of recurrence
equations (24.2.97'), the relation of definition is
−
∈→ ∈∀∈xx
1
(),
n
Uf Un .
(24.3.29')
Referring to the preceding example, the critical point
O and the limit cycles
1
C and
2
C are invariant sets.
An ω -limit point is “non-wandering” for the phase current
t
Φ if, for any
neighbourhood
U of it, there exists an arbitrary great moment t , so that
∩≠()
t
UU0Φ .
(24.3.30)
An analogous definition can be given for the recurrence equations (24.1.77').
The fixed points and the points which form the limit cycles are, obviously,
non-wandering. We mention that not all the invariant sets are formed by non-wandering
,
,
Dynamical Systems. Catastrophes and Chaos
709
points. In general, the wandering points correspond to a transitory behaviour; a
behaviour “on long term” (asymptotical) corresponds to the orbits of non-wandering
points.
A simply connected closed set
⊂
n
D , for which
() , 0
t
DDt⊂∀>Φ ,
(24.3.31)
is called trap-region; the mentioned condition is verified if the vector
fx() is directed
towards the interior of the domain
D at any point of its frontier. One can give an
analogous definition for the recurrence equations (24.1.77').
The set
≥
=A
0
()
t
t
D
∩
Φ ,
(24.3.32)
where D is a trap-region, is called attraction set; hence, a set ⊂A
n
is an attraction
set if there exists a neighbourhood
U of A so that ∈x()
t
UΦ for ≥ 0t and
→xA()
t
Φ for , tU→∞∀∈x .
The union of all the points which, indifferently of the moment in the past (
≤ 0t )
reach the neighbourhood
U of the attraction set A at the moment = 0t
≤0
()
t
t
U
∪
Φ
(24.3.33)
is called domain of attraction of the attraction set
A . The domains of attraction of the
attraction sets do not intersect, being separated by stable variations of the non-attraction
sets. Such a domain is called basin of attraction.
If an attraction set has the property of invariance
=∀∈AA() ,
t
t Φ ,
(24.3.34)
too, then this one is an attractor. For instance, a stable focus or a stable node are
attractors.
The structure of an attraction set can be, sometimes, very complicated. Let be thus a
one-dimensional phase current, defined by D. Ruelle’s differential equation
+=∈
4
sin 0,xx x
x
π
,
(24.3.35)
which has an infinite but numerable set of fixed points
0, 1/ , xx nn==± ∈ , the
interval
−[1,1] being an attraction set. Calculating
32
d()
4sin cos
d
fx
xx
xxx
ππ
π
=− + ,
we see that =
2
d(1/ )/d ( / )cosfnx n nππ; hence, the derivative is positive for an
even
n , the set of fixed points being a set of repeller (instable equilibrium), while for
MECHANICAL SYSTEMS, CLASSICAL MODELS
710
n odd the derivative is negative, the fixed points forming an attraction set (stable
equilibrium). For the fixed point
= 0x one can nothing state. Couley proposed, in
1978, that this attractor be called quasi-attractor.
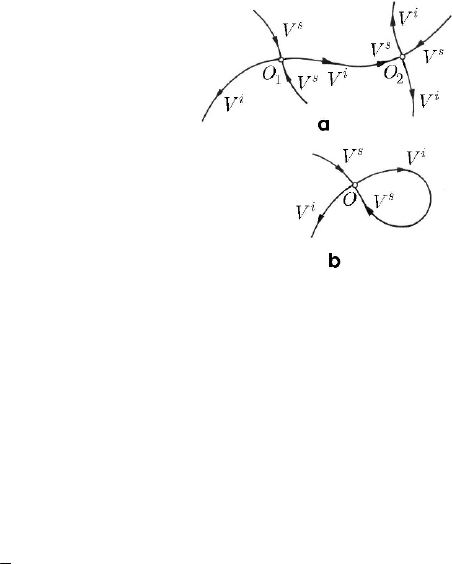
24.3.2.2 Heteroclinic and Homoclinic Trajectories
A trajectory which unites two distinct critical points
1
O and
2
O in the phase space is
called heteroclinic trajectory; we assume that
1
O and
2
O are hyperbolic critical points
and denote by
s
V and
i
V their stable and instable variants, respectively (Fig. 24.38a).
For the critical point
1
O
, the heteroclinic line is a part of its instable invariant variety,
1
O
being an ω -limit point (for →∞t ); these two points do not belong to the
heteroclinic line (being critical points, they cannot belong to other trajectories in the
phase space).
Fig. 24.38 Heteroclinic (a) and homoclinic (b) trajectories
A trajectory in the phase space which unites a critical point
O
with itself is called
homoclinic trajectory (Fig. 24.38b); for this point, supposed to be hyperbolic, which is
– at the same time –
ω -limit point and α -limit point and which does not belong to the
homoclinic line, the respective trajectory belongs both to the stable and to the instable
invariant variety.
The heteroclinic and homoclinic lines are both global bifurcations.
It has been shown in Sect. 24.1.1.1 that Helmholtz’s oscillator leads to a homoclinic
orbit of equation (24.2.11'') for
= 0C .
We considered in Sect. 7.2.3.4 the equation of the mathematical pendulum in a
non-linear case, which led us to the phase portrait in Fig. 7.22. The orbits corresponding
to
= 1h pass through the points ( ±0, 2ω ) and unite the points ( ± ,0π ); these latter
points are hyperbolic critical points, so that the corresponding orbits seem to be
heteroclinic orbits. Taking in view the periodic character of the motion, we can consider
as phase space a cylinder the points ( −
,0π ) and ( ,0π ) being coincident; hence, the
orbit (unique) is – in fact – homoclinic.
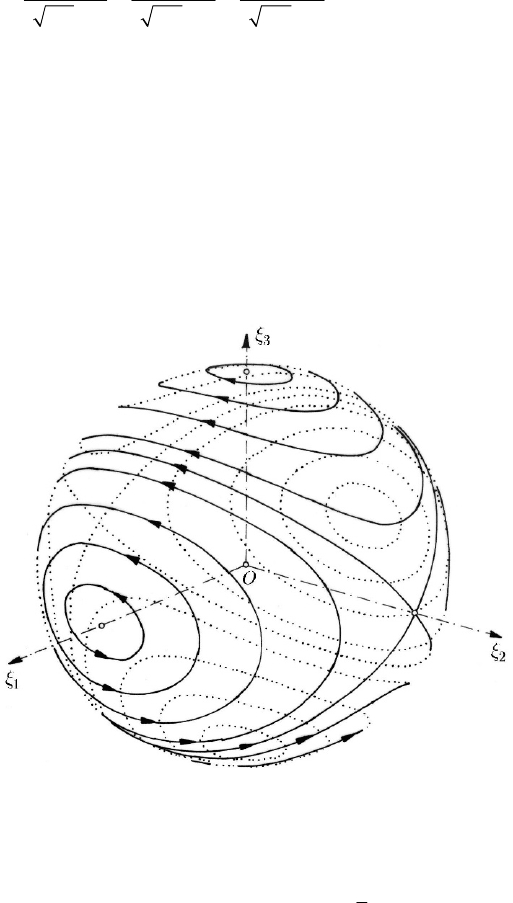
Let us consider the motion of a heavy rigid solid, fixed at its mass centre (the
Euler–Poinsot case of integrability, see Sect. 15.1.2). If we denote
=
111
Iξω,
==
222333
,IIξωξω, where
123
,,III are the central principal moments of inertia, while
Dynamical Systems. Catastrophes and Chaos
711
123
,,ωωω are the components of the rotation velocity vector ω with respect to the central
principal axes of inertia, then we can write the first integrals (15.1.47) in the form
++=
++=
222 2
123
222
123
222
123
(),
1,
()()()
I
II II II
ξξξ Ω
ξξξ
ΩΩΩ
(24.3.36)
where
I and Ω are constant quantities of the nature of a moment of inertia and of a
rotation velocity, respectively. It result thus a sphere and an ellipsoid at the intersection
of which one obtains the searches orbits. Assuming that
≥≥
123
III, one obtains the
centres
±(,0,0)IΩ , ±(0,0, )IΩ , corresponding to the intersection of the sphere with
the stable central principal axes of inertia, and the saddle points
±(0, ,0)IΩ ,
corresponding to the intersections of the sphere with the instable central principal axis
of inertia (Fig. 24.39). One of the saddle points is an ω -limit point and the other one is
an
α
-limit point. The centres are surrounded by closed curves, while the saddle points
are united by heteroclinic trajectories.
Fig. 24.39 Representation of the motion of a heavy rigid solid fixed at its mass centre:
intersection of a sphere with an ellipsoid
The heteroclinic and homoclinic trajectories are – in general – separating domains in
the phase space with different qualitative motions; e.g., in the case of the mathematical
pendulum previously considered, the homoclinic line
= 1h separates the domain in
which the motions are periodical from the domain in which these ones are rotational.