Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
522
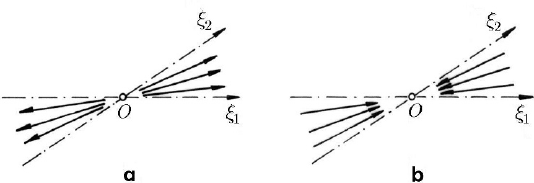
roots are negative and
t increases, then the representative point moves close to the
singular point, resulting a stable star (Fig. 23.9b).
If
= 0λ , then the general solution is
112212
, , , constCCCCξξ== =,
(23.1.24)
and any point of the phase space is a point of equilibrium.
Fig. 23.9 Representation of the solution for double eigenvalues
12
λλλ==:
(a) 0
λ > , instable star; (b) 0λ < , stable star
(b) The equations cannot be uncoupled and the solutions are
==
1122
e, e
tt
CCt
λλ
ξξ
,
(23.1.24')
Eliminating the time, we get
=
21121
lnKKξξξ
,
(23.1.24'')
where
12
,KK are other constants of integration, hence a family of logarithmic curves,
the singular point being a node; this node is asymptotically stable if
< 0λ and
instable if
> 0λ .
If
= 0λ , then the general solution is
=+ =
11222
,CCt Cξξ,
(23.1.24''')
the phase trajectories being straight lines
=
2
constλ
, parallel to the
1
Oξ
-avis, the
velocities being constant, in direct proportion to
2
ξ (Fig. 23.8); there exist points of
equilibrium
1
(,0)C , different from the origin, on the straight line =
2
0ξ .
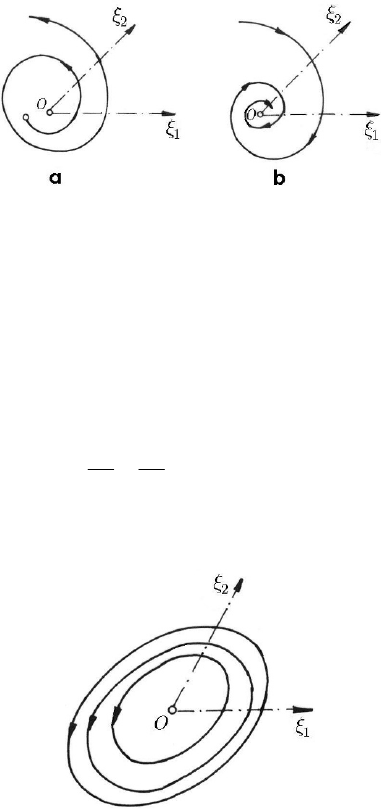
(v) Complex roots. If complex roots are
± iαβ
, then the solutions will be
==
11 22
ecos, esin
tt
CtCt
αα
ξβξβ,
(23.1.25)
where we used Euler’s formula. The trajectories of the representative point
P form a
family of spirals, the singular point being called focus; if
> 0α
, then the point
P
moves away from the origin, which is an instable focus (Fig. 23.10a), while if
< 0α ,
Stability and Vibrations
523
then the point
P tends to the singular point for →∞t , having – in this case – an
asymptotically stable focus (Fig. 23.10b).
Fig. 23.10 Representation of the solution for complex eigenvalues of real part α:
(a)
0α >
, instable focus; (b)
0α <
, stable focus
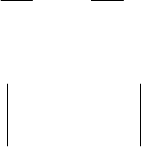
If
= 0α , then the roots are purely imaginary and the solutions are
==
11 22
cos , sinCtCtξβξβ
.
(23.1.25')
Eliminating the time
t between these relations, we get the trajectories of the
representative point in the form
+=
12
1
22
22
2
1
CC
ξξ
,
(23.1.25'')
hence a family of ellipses. The singular point is a centre, being stable (Fig. 23.11).
Fig. 23.11 Representation of the solution for purely imaginary eigenvalues
around a stable centre
The notions of point of centre type, point of focus type, point of saddle type etc. have
been introduced by H. Poincaré in the study of the behaviour of the integral curves in
the neighbourhood of singular points (Poincaré, H., 1952).
Let us apply the above theory to the case of the mathematical pendulum of equation
(see Sect. 7.1.3.1)

MECHANICAL SYSTEMS, CLASSICAL MODELS
524
+==
22
sin 0,
g
l
θω θ ω
,
(23.1.26)
l being the length of the pendulum, and g the gravity acceleration; the position of the
particle in motion is given by the angle
= ()tθθ . With the notations
121
, d /dxxxtθ== , we obtain the system of differential equations of first order
==−
11
2
11
dd
,sin
dd
xx
xx
tt
ω
;
(23.1.27)
retaining only the linear terms, we can write
==−
11
2
21
dd
,
dd
xx
xx
tt
ω
.
(23.1.27')
The characteristic equation
−
=+=
−−
22
2
1
0
λ
λω
ωλ
has only purely imaginary roots
=±
1,2
iλω, the singular point = 0θ being a centre of
stable equilibrium.
To study the position of equilibrium
=θπ, we make the change of variable
=+θπϕ, being led to the differential equations
−=
2
sin 0ϕω ϕ ;
(23.1.26')
the equivalent system of differential equations is
==
12
2
21
dd
,sin
dd
xx
xx
tt
ω
,
(23.1.28)
leading to the linear form
==
12
2
21
dd
,
dd
xx
xx
tt
ω
.
(23.1.28')
The characteristic equation
−
=−=
−
22
2
1
0
λ
λω
ωλ
has real roots of opposite signs
=±
1,2
λω, the singular point being a saddle point;
hence, the equilibrium is instable, the known results being thus verified.

Stability and Vibrations
525
23.1.1.5 Stability of the Equilibrium of an Autonomous Discrete Mechanical
System with
n Degrees of Freedom, in Linear Approximation
Let be, in general, an autonomous system of differential equation
==
12
d
( , ,..., ), 1,2,...,
d
i
n
i
x
Xxx x i n
t
,
(23.1.29)
for which the point
12
( , ,..., )
n
αα α corresponds to a position of equilibrium; the
system of equations
==
12
( , ,..., ) 0, 1,2,...,
n
i
Xinαα α ,
(23.1.29')
specifies the set of these points. Starting from one of these points, the origin
(0,0,...,0)
becomes a position of equilibrium by the translation
, 1,2,...,
iii
xx i nα→+ = . We
can assume, in general, that the system of differential equations (23.1.29) has a position
of equilibrium at the origin, this one being a singular point. An expansion into a
Maclaurin series leads to
=
=+ =
∑12 12
1
( , ,..., ) ( , ,..., ), 1,2,...,
n
nn
iijji
j
Xxx x ax Rxx x i n,
(23.1.30)
where
12
, ,...,
n
RR R
are remainders (powers of higher order of the variables
12
, ,...,
n
xx x) and where , , 1,2,...,
ij
aij n= , are constants.
In a linear approximation, we consider the system (called the system of the first
approximation too)
=
==
∑
1
d
,1,2,...,
d
n
i
ij j
j
x
ax i n
t
.
(23.1.31)
Let us search solutions of the form
=
== >
∑
2
1
e , 1,2,...., , 0
n
t
ii i
i
xu i n u
λ
;
(23.1.32)
introducing in (23.1.31), we get
=
==
∑
1
,1,2,...,
n
ij j i
j
au u i nλ ,
(23.1.33)
after simplifying with
≠e0
tλ
, or
()
=
−==
∑
1
0, 1,2,...,
n
ij ij j
j
aui nλδ ,
(23.1.33')

MECHANICAL SYSTEMS, CLASSICAL MODELS
526
where
ij
δ is the symbol of Kronecker. Because at least one of the solutions
j
u is
non-zero, the determinant of the coefficients of the system of linear algebraic equations
(23.1.33') must vanish, so that
[
]
=−=() det 0
ij ij
Daλλδ,
(23.1.34)
obtaining thus for
λ an algebraic equation of n th degree
−
−
++++=
1
0
11
... 0
nn
n
n
aa a aλλ λ ,
(23.1.35)
which has the roots
, 1,2,...,
i
inλ = .
The equation (23.1.34) is the characteristic (secular) equation of the matrix of
coefficients
[
]
=A
ij
a ;
(23.1.36)
introducing the roots
i
λ , called eigenvalues, in the system (23.1.33), we find n sets of
solutions
i
u , which form the eigenvectors. We introduce also the column matrices
(column vectors)
⎡
⎤⎡⎤
⎢
⎥⎢⎥
⎢
⎥⎢⎥
==
⎢
⎥⎢⎥
⎢
⎥⎢⎥
⎢
⎥⎢⎥
⎣
⎦⎣⎦
xu
11
22
,,
nn
xu
xu
xu
##
(23.1.36')
and the system of differential equations can be written in the form
=
x
Ax
d
d
t
,
(23.1.31')
its solutions being given by
=xue
tλ
.
(23.1.32')
The eigenvectors are given by the equation
,λ=≠0Au u u
,
(23.1.33'')
and the eigenvalues by the equation
[
]
=−=A() det 0D λλδ ,
(23.1.34')
where
δ is the unit matrix.
One must make a study of the eigenvalues, to can decide on the stability or instability
character of the position of equilibrium.
Stability and Vibrations
527
Let us suppose firstly that all the roots are simple; to each root
k
λ corresponds an
eigenvector
u
k
and a solution e , 1,2,...,
k
t
k
kn
λ
=u ; a linear combination of these
solutions
=
=
∑
xu
1
e
k
n
t
kk
k
C
λ
,
(23.1.37)
where
, 1,2,...,
k
Ck n= , are arbitrary constants, is – as well – a solution of the system
of linear differential equations (23.1.31).
To show that (23.1.37) is the general solution of the mentioned system, one must
show firstly that the eigenvectors
, 1,2,...,
k
kn=u , form a system of linear
independent vectors. Let be
1
n
kk
k
c
=
=
∑
0u ;
multiplying at the left by the matrix
A
and taking into account the equation (23.1.33''),
written for the index
k , we obtain
1
n
kk k
k
cλ
=
=
∑
0u .
Eliminating
1
c between the last two relations, we get
()
1
2
n
kkk
k
cλλ
=
−=
∑
0u .
Multiplying further, at the left, this last relation by the matrix
A and taking into account
the equation (23.1.33''), we can eliminate
2
c between the equation just obtained and the
previous one; proceeding – further – analogously, we can eliminate all the constants
k
c ,
obtaining, finally,
()()( )
12 1
...
nn n nn
n
cλλλλ λλ
−
−− − =0u ,
wherefrom
= 0
n
c , all the brackets being non-zero. Because all constants
k
c are
equivalent, it follows that
=====
121
... 0
n
ccc c , the eigenvectors uu u
12
, ,...,
n
being thus linearly independent. Putting
= 0t in (23.1.37), we can write
=
=
∑
xu
0
1
n
kk
k
c ;
(23.1.37')
hence, assuming the initial conditions
=xx
0
(0) , in a Cauchy problem, we can
determine, univocally, the constants
, 1,2,...,
k
ck n= , because the vectors u
k
are
linearly independent and form a basis in an
n -dimensional space. Thus, the generality
of the solution (23.1.37) is proved.
MECHANICAL SYSTEMS, CLASSICAL MODELS
528
If one of these roots, let be
k
λ , is double, then one can show that, besides the
solution
e, e
kk
tt
kk
t
λλ
uu is a solution too; further, one can show that to a root
k
λ with a
multiplicity of order
m , corresponds a solution of the form
()
−−
++ ++ u
01 22 11
... e
k
mm t
kk k k k
CCtCt Ct
λ
.
(23.1.37'')
The formulae (23.1.37) and (23.1.37') lead to important conclusions concerning the
problem enounced above. Thus:
(i) If all the roots of the equation (23.1.35) are real and negative or are complex
conjugate with a negative real part (
Re 0, 1,2,...,
k
knλ <=
), then appear factors of
the form
−
e
tα
and
ecos( ), , 0
t
t
α
βααβ
−
−>
, respectively, so that
→∞
=xlim ( )
t
t 0 ; the
trajectory of the representative point remains in the neighbourhood of the origin to
which it tends, so that this one is position of asymptotically stable equilibrium.
If some of the roots are simple and purely imaginary (
Re 0, 1,2,...,
k
knλ ≤= ),
then appear also terms of the form
−cos( )tβα, which do not vanish for →∞t , but
remain bounded for any
t ; the position of equilibrium is simply stable.
(ii) If at least one root is real and positive or if at least two complex conjugate roots
have their real part positive or if at least two complex conjugate roots purely imaginary
are multiple (at least double), then appear terms of the form
−e,e cos( )
tt
t
αα
βα,
cos( ), , 0ttβααβ−>, which are not bounded for →∞t ; the position of
equilibrium is instable.
Figuratively, let be the complex plane of the roots
k
λ ; if all the roots are at the left
side of the imaginary axis, then the equilibrium is asymptotically stable, if on the
imaginary axis too are one or several distinct roots, then the equilibrium is simply
stable, while if all the roots are at the right side of the imaginary axis or if on the
imaginary axis there are multiply roots, then the equilibrium is instable.
Let us consider, e.g., the case of a damped linear oscillator, of equation (see Sect.
8.2.2.6)
2
20, 0xxxμω μ++= > ,
(23.1.38)
with the notations
2
2/, /km kmμω
′
==
, where m is the mass, k is an elastic
coefficient and
′
k is a coefficient of viscous dumping. We can write the equation in the
form of the system
==−−
12
2
212
dd
,2
dd
xx
xxx
tt
ωμ;
(23.1.38')
the characteristic equation is
−
=+ +=
−−−
22
2
1
20
2
λ
λμλω
ωμλ
,

Stability and Vibrations
529
wherefrom
=− ± −
22
1,2
λμμω. The roots are real and negative (if
>
22
μω
) or
complex conjugate with the real part negative (if
<
22
μω) or we have a negative
double root (
=μω); obviously, the position of equilibrium is asymptotically stable,
the results obtained in Sect. 8.2.2.6 being thus verified.
If we have
< 0μ (self-sustained motions) in the equation (23.1.38), then one can
make an analogous study, finding the same roots, which have a positive real part; the
position of equilibrium is instable, corresponding to the results in Sect. 8.2.2.7.
23.1.1.6 Asymptotic Stability Criteria for the Systems of Linear Differential
Equations
We have seen above that the solution of the system of linear differential equations
(23.1.31) is asymptotically stable at the origin if and only if all the roots of the
characteristic equation have the real part negative; hence, the problem is put to find the
conditions which must be fulfilled by the coefficients of the polynomial function
−
−
=+ ++ +
1
0
11
() ...
nn
nn
n
Paa aaλλλ λ,
(23.1.35')
so that its zeros do verify the mentioned property.
We assume that
>
0
0a and multiply the equation by −1 if <
0
0a . Let be
0, 1,2,...,
k
kmλ <= , the real zeros and let be i, 0
kkk
αβα±<,
=−1,2,...,( )/2knm, the complex conjugate zeros, which are all at the left of the
imaginary axis; we can write
()( )( )
()
()
()/2
0
11
()/2
222
0
11
() i i
2.
k
nm
m
n
kkkkk
kk
nm
m
kkk
kk
Pa
a
λλλλαβλαβ
λλ λ αλα β
−
==
−
==
= − −− −+
=− −++
∏∏
∏∏
(23.1.35'')
Because all the terms at the right side of the expression (23.2.35'') are positive, it
results that all the coefficients of the polynomial function (23.1.35') must be positive
(and non-zero,
0, 0,1,2,...,
j
aj n>= , the polynomial being non-lacunar); this is a
necessary condition that its zeros have a negative real part.
In 1875, Routh gave an algorithm by means of which, using only the coefficient of
the polynomial
()
n
Px, one can show if all the considered zeros have their real part
negative; in 1895, Hurwitz stated, independently, an analogous algorithm, expressed in
a more convenient form, by means of some determinants, called Hurwitz’s
determinants, obtained as principal determinants from Hurwitz’s matrix (Routh, E.J.,
1892)

MECHANICAL SYSTEMS, CLASSICAL MODELS
530
−
−
−
−
⎡⎤
⎢⎥
⎢⎥
⎢⎥
⎢⎥
=
⎢⎥
⎢⎥
⎢⎥
⎢⎥
⎣⎦
H
5
13 7 21
0
246 22
13 23
0
24 24
... ... 0
... ... 0
0 5 ... ... 0
0 ... ... 0
... ... ... ... ... ... ... ...
... ... ... ... ... ... ...
j
j
j
j
n
aaaa a
aaaa a
aaa a
aaa a
a
,
(23.1.39)
where
= 0
p
a everywhere one has >pn or < 0p , in the form
−
== = ==H
5
13
13
0
112 3 24 1
0
2
13
, , ,..., det
0
nn
n
aaa
aa
aaaaa
aa
aa
ΔΔ Δ Δ Δ
.
(23.1.39')
We can thus state
Theorem 23.1.3 (Routh–Hurwitz criterion). If all Hurwitz’s determinants
corresponding to the polynomial
()
n
P λ , non-lacunary and with all coefficients
positive, are positive
12
0, 0,..., 0
n
ΔΔ Δ>> >,
(23.1.39'')
then and only then all the zeros of this polynomial have their real part negative and the
system of differential equations (23.1.31) has an asymptotically stable position of
equilibrium at the origin.
In particular, if
= 2n , then it results
=> = = >
11 22112
0, 0aaaaΔΔΔ ,
so that it is necessary and sufficient that the three coefficients be positive.
If
= 3n , then we obtain
== =−>=>
13
0
112 12 3 332
0
2
,0,0
aa
aaaaaa
aa
ΔΔ ΔΔ;
besides the positivity of the coefficients, the necessary and sufficient condition
−>
0
12 3
0aa aa
(23.1.40)
must be fulfilled too.
If
= 4n , then we have

Stability and Vibrations
531
0
11 212 3
5
13
2
0
3243214443
13
0, 0,
0, 0;
0
aaaaa
aaa
aaa a aa a
aa
ΔΔ
ΔΔΔΔ
=> = − >
==−>=>
as one can easy see, the condition
>
3
0Δ can be fulfilled only if the condition
>
2
0Δ is also fulfilled. Hence, besides the positivity of the coefficients, only the
necessary and sufficient condition
()
−−>
2
0
312 3 14
0aaa aa aa
(23.1.40')
must be added.
For instance, corresponding to what has been said before, the position of equilibrium
is asymptotically stable for the equation (23.1.38), because all the coefficients of the
characteristic equation (of second degree) are positive.
The Routh–Hurwitz criterion is easy to apply if the characteristic equation has
numerical coefficients; but if these coefficients contain also literal parameters, then the
problem becomes complicated from a practical point of view. It is useful to consider
also the conditions established by Liénard and Chipart in 1914, where the number of
inequalities is reduced to a half with respect to the conditions (23.1.39''). As a matter of
fact, these conditions come from the observations made on Hurwitz’s determinants,
assuming – further – the positivity of the coefficients of the characteristic equation. One
sees easily from (23.1.39') that
> 0
n
Δ leads to
−
>
1
0
n
Δ . One can show also that the
condition
−
>
1
0
n
Δ includes also the condition
−
>
2
0
n
Δ , as it has been seen in the
preceding particular case; then,
−
>
3
0
n
Δ includes the condition
−
>
4
0
n
Δ a.s.o. We
can state
Theorem 23.1.4 (Liénard–Chipart criterion). If Hurwitz’s determinants, corresponding
to the polynomial
()
n
P λ , non-lacunary and with all coefficients positive, verify the
conditions
−
−−
>>>
5
13
0, 0, 0, ...
n
nn
ΔΔΔ ,
(23.1.39''')
then and only then all zeros of this polynomial have the real part negative and the
system of differential equations (23.1.31) admit an asymptotically stable position of
equilibrium at the origin.
Let us write the polynomial
()
n
P λ in the form
()
=
=−
∏
0
1
()
n
n
k
k
Paλλλ
,
(23.1.35''')