Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
532
where
, 1,2,...,
k
knλ = , are its n zeros. Then, let us replace λ by iω and let us
make
ω vary from −∞ to ∞ ; the increase of the angle = arg ( i)
n
Pθω is given by
∞∞
−∞ −∞
=
=−
∑
1
() arg(i )
n
k
k
Δθω Δ ω λ .
We notice that (we assume that no one of the roots is on the imaginary axis)
∞
−∞
<
⎧
⎪
−=
⎨
−>
⎪
⎩
for 0,
arg(i )
for 0.
k
k
k
πλ
Δωλ
πλ
Denoting by
l
n and
r
n the number of zeros at the left and at the right of the imaginary
axis, respectively (
+=
r
l
nn n), it results
()
∞
−∞
=−()
r
l
nnΔθω π.
Let us consider the hodograph (curve) described by the affix of the complex number
(i)
n
P ω , when ω varies from −∞ to ∞ ; this hodograph has two branches: one for
> 0ω
and one for
< 0ω
, the two branches being symmetric with respect to the real
axis, because
(i)
n
P ω and −(i)
n
P ω are complex conjugate numbers. Denoting by
∞
0
Δ
the increase corresponding to the variation of
ω from 0 to ∞ , we obtain
()
∞∞
−∞
==−
0
11
() ()
22
r
l
nnΔθω Δ θω π.
If
= 0
l
n and = 0
r
n , when all the zeros are situated at the left of the imaginary
axis. We can thus state
Theorem 23.1.5 (geometrical criterion). All the zeros of the polynomial ()
n
P λ
(non-lacunary and with all coefficients positive) have their real part negative if and
only if the hodograph of the polynomial
(i)
n
P ω , for ω varying from 0 to ∞ , does not
pass through the origin (so that
()
n
P λ does not have purely imaginary zeros) and if
the condition
∞
=
0
()
2
n
Δθω π
(23.1.41)
is fulfilled.
We notice that for a stable polynomial (called Hurwitz polynomial too) the argument
has a monotone variation when
ω varies from 0 to ∞ .
This criterion has been applied by Mikhailov to the study of the systems with control
function; this criterion is called Mikhailov’s criterion too.

Stability and Vibrations
533
23.1.1.7 Instability of Equilibrium. Lyapunov’s and Chetaev’s Theorems
In 1892, in his famous doctor thesis “General problem of the stability of motion”,
A.M. Lyapunov has put the problem of the reciprocal of the Lagrange-Dirichlet
theorem, problem which was not yet completely solved; other studies have been made
by N.G. Chetaev (Lyapunov, A.M., 1949; Chetaev, N.G., 1963).
Let us return to the notations in Sect. 23.1.1.3 and let us suppose, further, that
12
... 0
s
qq q==== and (0,0,...,0) 0U = for the position of equilibrium. Let be
an expansion of the potential function into a power series after the generalized
co-ordinates
12 112
( , ,..., ) ( , ,..., ) ...
ms s
m
U U qq q U qq q
+
=+ +,
(23.1.42)
where
12
(,,..., )
s
kk
UUqq q= is a homogeneous function of degree
k
,
, 1,...kmm=+, and
m
U is not identical to zero and where the smallest term of the
expansion corresponds to
2m ≥ , because at the origin
0
(/) 0
j
Uq∂∂ =, this one
being a position of equilibrium.
Let us expand into a power series, with respect to the generalized co-ordinates, the
coefficients
12
( , ,..., )
s
jk jk
ggqqq= of the expression (23.1.14) of the kinetic energy
T
; we denote
0
0
(1/2)
j
j
kk
Tgqq= , where
0
(0, 0,...,0)
jk
jk
gg= . It results
0
2
,TT UU=+ =+OO,
(23.1.43)
where
O represents the terms of higher order with respect to the generalized
co-ordinates and the generalized velocities, respectively. Because
0
T is a positive
definite quadratic form with constant coefficients, there exists a transformation of
co-ordinates
, 1,2,...,
jiji
qj sηα==, so that – simultaneously – the two quadratic
forms be reduced to two sums of squares, i. e.
22
11
11
,
22
ss
kkk
kk
TUηλη
==
=+= +
∑∑
OO,
(23.1.43')
where the coefficients
, 1,2,...,
k
ksλ = , are given by the secular equation
0
det 0
jk k jk
agλ−=
⎡⎤
⎣⎦
;
(23.1.43'')
there exists at least one
0
k
λ < , because the quadratic form
2
U can take some negative
values too. The co-ordinates
k
η are called normal co-ordinates or principal
co-ordinates. Lagrange’s equations in normal form (written by means of the normal
co-ordinates) are of the form
(!), 1,2,...,
kkk
ksηλη=− + = O .
(23.1.43''')
MECHANICAL SYSTEMS, CLASSICAL MODELS
534
Let be the auxiliary quadratic form (
V does not represent the potential energy)
()
22
22 2
1
1
11 ,
22 2
s
kkk k kkk k k
k
V
μμ
ελλημληη λη
=
⎡⎛ ⎞ ⎛ ⎞ ⎤
=− + + + − + + +
⎜⎟ ⎜⎟
⎢⎥
⎣⎝ ⎠ ⎝ ⎠ ⎦
∑
(23.1.44)
where
1for 0,
1for 0,
k
k
k
λ
ε
λ
−<
⎧
⎪
=
⎨
≥
⎪
⎩
(23.1.44')
with
1,2,...,ks= and 0μ > . It is easy to see that
()
()
2
22
1
d
ee
d4
s
tt
kk k k
k
V
t
μμ
μ
μελ η η
−−
=
⎡
⎛⎞ ⎤
=+++
⎜⎟
⎢
⎥
⎣
⎝⎠ ⎦
∑
O ,
(23.1.44'')
for a mechanical system in motion. Without any loss of generality, let us assume that
1
0λ < ,
1
λ being the negative number with the greatest modulus; we choose 0μ > ,
so that the conditions
22
2
111
0, 0
42
μμ
λλλ+< ++>
be fulfilled. In this case, the sum in the expression (23.1.44'') is a positive definite
quadratic form. If we choose, in a
Δ -neighbourhood,||,
k
ηΔ< ||
k
ηΔ< ,
1,2,...,ks= , hence quantities sufficiently small in absolute value, then it results
()
d
e0
d
t
V
t
μ−
> ,
wherefrom
0
()
0
V>V e
ttμ −
,
(23.1.44''')
with
00
()Vt V= . Let us take all the initial values equal to zero, excepting
0
1
η , which
will be taken so that
0
1
||ηΔ< . From (23.1.44) and from the second condition put
above, it results
0
0V > , the motion being in the limits of the considered
Δ -neighbourhood, as small could be
0
1
||η
; otherwise, from (23.1.44''') would result
lim
t
V
→∞
=∞, even if the quadratic form V is bounded in this Δ -neighbourhood.
We can thus state
Theorem 23.1.6 (Lyapunov; first theorem). If the potential energy
12
( , ,..., )
s
Uq q q− of
a conservative discrete mechanical system has not a minimum at a position of
Stability and Vibrations
535
equilibrium, which is put into evidence from the quadratic form
212
( , ,..., )
s
Uqq q of the
expansion (23.1.42) (hence,
2
2, mU= having negative terms – may be ones of them
are positive), then the respective position of equilibrium is instable.
For
2m > in the expansion (23.1.42), without proof, we state
Theorem 23.1.7 (Lyapunov; second theorem). If the potential energy
12
( , ,..., )
s
Uq q q−
of a conservative discrete mechanical system has a local maximum for
12
...qq==
0
s
q==, which can be shown starting from the term
12
(,,..., )
ms
Uqq q, 2m ≥ , with
the smallest power (in a neighbourhood of the origin, excluding the origin,
0
m
U−<,
which is possible only if
m is even) in the expansion (23.1.42), then the position of
equilibrium is instable.
As well, we state
Theorem 23.1.8 (Chetaev). If the potential energy
12
( , ,..., )
s
Uq q q− of a conservative
discrete mechanical system is a homogeneous function in the generalized co-ordinates
and if at the position of equilibrium
12
... 0
s
qq q==== does not take place a
minimum, then this position is instable.
Let be, e. g.,
12
... , const
s
UCqqqC==; Chetaev’s theorem shows that the origin
is an instable position of equilibrium.
23.1.1.8 Asymptotic Stability of Equilibrium. Dissipative Discrete Mechanical
Systems
The notion of asymptotic stability has been introduced in Sect. 23.1.1.1. Thus, a
position of equilibrium is called asymptotically stable if it is stable and if, for values (in
modulus) sufficiently small of the initial generalized co-ordinates and of the generalized
velocities, all the generalized co-ordinates and the generalized velocities tend to zero
when the time
t increases indefinitely, hence if it exists a number
0
0δ > so that
lim ( ) 0, lim ( ) 0, 1,2,...,
jj
tt
qt qt j s
→∞ →∞
===
,
(23.1.45)
when the inequalities
00
00
, , 1,2,...,
jj
qqj sδδ<<= ,
(23.1.45')
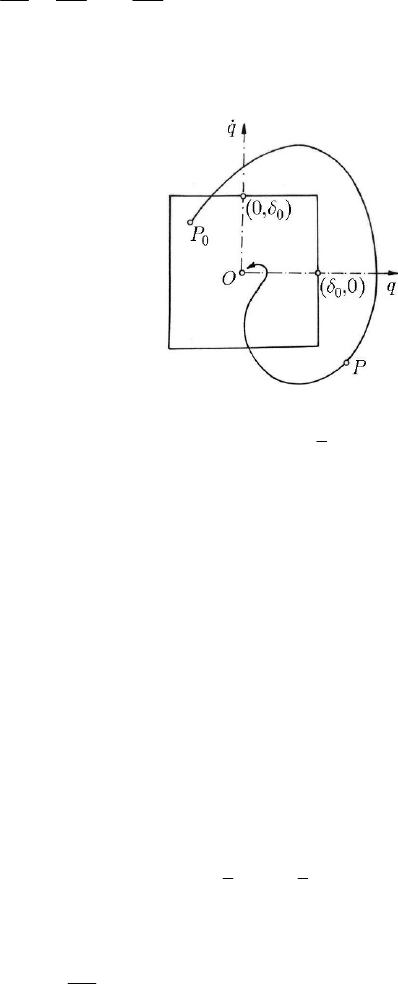
hold. The phenomenon is graphically illustrated in Fig. 23.12 for
1s =
in the space
(,)qq .
Let be a holonomic and scleronomic discrete mechanical system subjected to the
action of some potential generalized forces
12
/ , ( , ,..., )
s
j
UqUUqq q∂∂ = and of some
non-potential generalized forces
12 12
( , ,..., , , ,..., ), 1,2,..,
ss
jj
QQqq qqq qj s== , of
the form (23.1.13'). Lagrange’s equations can be written in the normal form (18.2.47'),
hence in the form
12 12
( , ,..., , , ,..., ), 1,2,...,
ss
jj
qGqq qqq qj s== .
(23.1.46)
MECHANICAL SYSTEMS, CLASSICAL MODELS
536
The total derivative with respect to time to the mechanical energy
12 12
( , ,..., , , ,..., )
ss
EEqq qqq q= is given by
12 12
d
( , ,..., , , ,..., )
d
ss
jj
jj
EE E
qGEqqqqqq
tq q
∂∂
′
=+ =
∂∂
;
(23.1.47)
hence, at each point of the space
12 12
( , ,..., , , ,..., )
ss
qq qqq q , not only the mechanical
energy has a finite value, but also its total derivative with respect to time.
Fig. 23.12 Graphical representation of asymptotic stability in the phase plane
If the non-conservative generalized forces
j
Q are dissipative, then their power is
negative (see Sect. 18.2.1.3). In this case,
d/d 0Et≤ if the discrete mechanical
system is in motion, so that the function
E
is non-positive in the domain of the space in
which the motion takes place; one has equality only in the case in which the generalized
velocities vanish
12
( ... 0)
s
qq q==== . Let us suppose that the position of
equilibrium of the discrete mechanical system is isolated, hence that in the
neighbourhood there are not other positions of equilibrium. One can state
Theorem 23.1.9. If the potential energy
U−
of a dissipative holonomic and
scleronomic discrete mechanical system has a strict minimum for an isolated position
of equilibrium, then this position is asymptotically stable.
Let us consider again the case of a damped linear oscillator of equation (23.1.38),
considered in Sect. 23.1.1.5, written in the form
0, , , 0mx k x kx m k k
′′
++= > ;
the mechanical energy is given by
22
11
22
Emx kx=+
,
wherefrom
()
2
d
0
d
E
mxx kxx mx kx x k x
t
′
=+=+ =−<
.

Stability and Vibrations
537
Hence, the oscillator is dissipative, the position of equilibrium being isolated, as it results
from the equation of motion; using the Theorem 23.1.9, we can state that the position of
equilibrium is asymptotically stable, as it has been shown in Sect. 23.1.1.5 too.
To generalize the Lagrange-Dirichlet theorem, Lyapunov replaces the mechanical
energy
E by any function
12 12
( , ,..., , , ,..., )
ss
VVqq qqq q= of class
1
C (with respect
to the generalized co-ordinates and to the generalized velocities), which has a minimum
at the position of equilibrium and which does not increase for any motion of the
mechanical system. Let us calculate the total derivative with respect to time
12 12
d
( , ,..., , , ,..., )
d
ss
jj
jj
VV V
qGVqqqqqq
tq q
∂∂
′
=+ =
∂∂
.
(23.1.48)
Observing that
0, 1,2,...,
jj
qq j s== = , at the origin, the function V
′
vanishes
at this point. Because
V does not increase for any motion, we have d/d 0VtV
′
=≤,
so that
V
′
has a maximum at the position of equilibrium; if this maximum is a local
one, then in the neighbourhood of the origin (excepting the point
O ) we have 0V
′
< ,
so that at the origin the function
V is strictly decreasing. One can now follow the proof
given to the Lagrange-Dirichlet theorem, replacing the function
E by the function V .
Thus, one can state
Theorem 23.1.10 (Lyapunov). Knowing the position of equilibrium of a holonomic and
scleronomic discrete mechanical system, subjected to the action of forces which do not
depend explicitly on time, if there exists a function
12 12
( , ,..., , , ,..., )
ss
Vq q q q q q of class
1
C which has a strict extremum at the position of equilibrium and if the derivative V
′
with respect to time (calculated by means of the equations of motion) has an extremum
of opposite type, at the same position of equilibrium, then this position is stable. If the
extremum of the derivative is strict too, then the position of equilibrium is
asymptotically stable.
We notice that, in the formulation of the stability criterion, the words “minimum”
and “maximum” can be interchanged, because one can replace the function
V by the
function
V− , which leads to the previous formulation. The function V is called
Lyapunov’s function.
23.1.2 Stability of Motion
In what follows, one makes a general study of the problem by the stability of the
motion, with the aid of Lyapunov’ function. A special attention is given to the systems
with cyclic co-ordinates and to the limit cycles. We mention also the case of
rheonomous systems (Lyapunov, A.M., 1949).
23.1.2.1 General Problem of the Stability of Motion. Lyapunov’s Theorems
The stability of the position of equilibrium of a discrete mechanical system is put in
evidence, in general, by the inequalities (23.1.1), (23.1.1'). But if these inequalities take
place only for some generalized co-ordinates
12
, ,...,
s
qq q and generalized velocities

MECHANICAL SYSTEMS, CLASSICAL MODELS
538
12
, ,...,
s
qq q or, more general, for some functions of these variables
12 12
( , ,..., , , ,..., ), 1,2,...,
ss
ii
xxqq qqq qi n== ,
(23.1.49)
chosen so that
(0,0,...,0,0,0,...,0) 0
i
x = , then we have to do with a problem of
conditioned stability; we assume that these new functions verify the non-autonomous
system of differential equations of first order
12
d
( , ,..., ; ), 1,2,...,
d
i
n
i
x
Xxx xt i n
t
==
,
(23.1.49')
where
i
X are functions of class
0
C
in the domain
0
, , 1,2,...,
i
xtti nΔ≤≥= ,
(23.1.49'')
0
t being the initial moment.
To the position of equilibrium correspond
, 1,2,...,
i
xi n= , which implies the
conditions
(0,0,...,0; ) 0, 1,2,...,
i
Xtin≡= .
(23.1.49''')
The stability problem of the null solution imposes the existence of
() 0δδε=> for
any
0ε > , so that if
0
( ) , 1,2,...,
i
xt i nδ<= ,
(23.1.50)
then the inequalities
() , 1,2,...,
i
xt i nε<= ,
(23.1.50')
must take place for any
0
tt≥ .
In the case of asymptotic stability, there must exist
0
0δ > so that
lim ( ) 0, 1,2,...,
i
t
xt i n
→∞
== ,
(23.1.51)
if
00
( ) , 1,2,...,
i
xt i nδ<= .
(23.1.51')
In the case of a problem of non-conditioned stability of the position of equilibrium,
one can take as variables
, 1,2,...,
i
xi n= , the generalized co-ordinates and the
generalized velocities; thus, the system (23.1.49') becomes Lagrange’s system of

Stability and Vibrations
539
equations (18.2.29), written in the form of a system of differential equations of first
order. If we take these variables as generalized co-ordinates and generalized moments,
then one obtains Hamilton’s equations (19.1.14).
Let be two important cases of functions , 1,2,...,
i
Xi n= :
(i) The stationary case in which
t does not appear explicitly in these functions
0, 1,2,...,
i
i
X
Xin
t
∂
===
∂
,
(23.1.52)
the equations being autonomous.
(ii) The periodic case, of period
τ
with respect to the temporal variable t , for which
+= =
12 12
( , ,..., ; ) ( , ,..., ; ), 1,2,...,
nn
ii
Xxx xt Xxx xti nτ
.
(23.1.52')
By a demonstration analogue to that used for the Lagrange-Dirichlet theorem, one
obtains an extension of the Theorem 23.1.10. Thus, we state
Theorem 23.1.11 (Lyapunov). If, in case of the stationary or periodic system of
differential equations of first order (23.1.49'), there exists a function
12
( , ,..., ; )
n
Vx x x t
of class
1
C in the domain (23.1.49''), which – for t considered as a parameter – has a
strict extremum at the point
0, 1,2,...,
i
xi n== , and if, at the same point and at any
moment
t , its total derivative with respect to time
12
1
(,,..., ;)
n
n
i
i
i
VV
Vxx xt X
xt
=
∂∂
′
=+
∂∂
∑
(23.1.53)
has an extremum of opposite type, then the null solution of the system is stable. If the
extremum of the derivative
V
′
is strict too, then the solution is asymptotically stable.
In a stationary case, the function
V cannot depend explicitly on time, while in a
periodic case, it must be periodic too, of the same period
τ as the functions
, 1,2,...,
i
Xi n= .
In the general case (non-stationary and non-periodical) Lyapunov’s function
V
must
fulfill more rigorous conditions.
Let us consider a particular case in which one can use the Theorem 23.1.11 for a
simple (non-asymptotic) stability. Let us suppose that the function
12
( , ,..., ; )
n
Vx x x t
is a first integral of the system of equations (23.1.49'), hence that it becomes a constant
(independent of
t
), after replacing the variables
, 1,2,...,
i
xi n=
, by a solution of this
system; in this case
d/d 0VtV
′
== has an extremum at the origin for any t .
Starting from the Theorem 23.1.11, we can state
Corollary 23.1.1. If the system of differential equations (23.1.49') admits a first
integral
12
( , ,..., ; )
n
Vx x x t which has a strict extremum at
12
... 0
n
xx x====
for any fixed
t , then this solution is stable.
MECHANICAL SYSTEMS, CLASSICAL MODELS
540
In a stationary case, Lyapunov’s function does not depend explicitly on time, while
in a periodic case this function is periodic with respect to time, of period
τ .
As we have seen in Sect. 23.1.1.1, the study made on the system of differential
equations (23.1.49') is equivalent to a study on the system of equations of perturbed
motions, of the form (23.1.7), hence it is equivalent to a study on an arbitrary system of
differential equations of first order (e. g., of the form (23.1.6)).
The Theorem 23.1.11 can be thus used not only to the study of the stability of a
position of equilibrium, but also to the study of the stability of motion.
23.1.2.2 Stability of Systems of Non-linear Differential Equations
We consider the system of non-linear differential equations (23.1.29), being limited
to the autonomous case; as in Sect. 23.1.1.1, we use the notation
22 2
12
() () () ... ()
n
txtxt xtρ =+++.
(23.1.54)
The mechanical systems which lead to such systems of differential equations are
scleronomic ones.
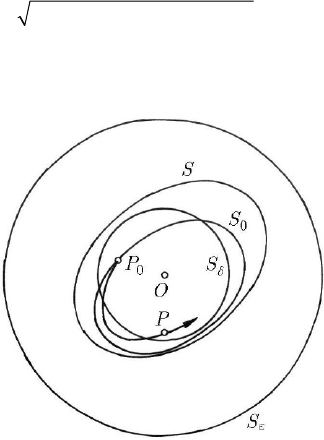
Fig. 23.13 Graphical representation of the stability problem of autonomous systems
of non-linear differential equations
Let be a function
12
( , ,..., )
n
Vx x x positive definite (otherwise, one considers – for the
proof – the function
V− ); we assume that in the spherical domain ()thρ ≤ we have
0V > and 0V
′
≤ . As well, let be also the sphere S
ε
, specified by
() ,0thρεε=<<, contained in the sphere
h
S , of equation ()thρ = (Fig. 23.13). We
denote by
l the inferior bound of the function V on S
ε
, so that, on this sphere,
0Vl≥>. The surface S of equation () , 0Vt C C l=<<, will, obviously, be
interior to the sphere
S
ε
. Let be also the number δ sufficiently small, so that S
δ
of
equation
()tρδ= be interior to the surface S , non having any common point with this
Stability and Vibrations
541
one (which is possible, because
S does not pass through the origin, having 0V > ).
Observing that
0V ≤
(see Sect. 23.1.1.2), the trajectory of the representative point P ,
which starts from the initial position
0
P , interior to the sphere S
δ
, does not pierce the
surface
0
S , specified by the equation
00
()Vt V= ; having
0
VC< , the surface
0
S is
interior to the surface
S
, the trajectory of the point
P
being thus interior to this surface.
We can state
Theorem 23.1.12 (Lyapunov; first theorem of stability). If for a system of non-linear
differential equations (23.1.29) (of the perturbed motion), we can build up a function
12
( , ,..., )
n
Vx x x of definite sign, for which – due to the system – the derivative V
′
is a
function of constant sign, opposite to the sign of
V , or is identically zero, then the
non-perturbed motion (the trivial solution) is stable.
We use previous notations and assume that
0V
′
< (strict inequality); in this case,
the function
()Vt is strictly monotonically decreasing and inferior bounded (by zero).
Hence
lim ( ) 0
t
Vt α
→∞
=≥. In the closed domain contained between the surfaces
0
VV=
and
V α=
(we suppose that
0α ≠
) the negative function V
′
has a superior
bound
(0)ll−>; we have 0l ≠ because V
′
is negative definite (it vanishes only at
the origin). It results
Vl
′
≤− in the mentioned domain, for any t ; in this case, the
identity
0
0
d
t
t
VV Vt
′
−=
∫
leads to
00
()VV ltt≤−−. For t sufficiently great, V
becomes negative, which contradicts the hypothesis according to which
0V > . Hence,
one can have only
= 0α
. Thus, we state
Theorem 23.1.13 (Lyapunov; second theorem of stability). If, for the system of
non-linear differential equations (23.1.29) (of the perturbed motion) we can build up a
function
12
( , ,..., )
n
Vx x x of definite sign, for which – due to the system – the
derivative
V
′
is a function of definite sign (not only of constant sign), opposite to that
of
V , then the unperturbed motion (the trivial solution) is asymptotically stable.
This theorem gives sufficient conditions of asymptotic stability for small initial
perturbations. Barbashin and Krasovski gave sufficient conditions of asymptotic
stability for any initial perturbations.
As we have seen in Sect. 23.1.1.7, a study of the instability of equilibrium, hence of
the motion too, is – as well – important; a proof, analogue to those previously given,
allows to state.
Theorem 23.1.14 (Lyapunov; first theorem of instability). If, for the system of
non-linear differential equations (23.1.29) (of the perturbed motion), we can build up a
function
12
( , ,..., )
n
Vx x x for which – according to the system – the derivative V
′
is a
function of definite sign, the function
V being not of constant sign (and opposite to that
of
V
′
), then the unperturbed motion is instable.
We can state also
Theorem 23.1.15 (Lyapunov; second theorem of instability). If, for the system of
non-linear differential equations (23.1.29) (of the perturbed motion) we can set up a
function
12
( , ,..., )
n
Vx x x , so that – according to the system – to obtain a derivative