Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
502
We introduce the generalized co-ordinates
′′
== = = =
5
12 4 41 2
,,, ,qq q qxqxθϕψ , the
mechanical system having
−=52 3 degrees of freedom. We choose the angles , θψ and
ϕ as independent co-ordinates and notice that the constraint relations do not contain the
generalized co-ordinate
θ ; we can thus write an equation of Lagrange corresponding to this
generalized co-ordinate.
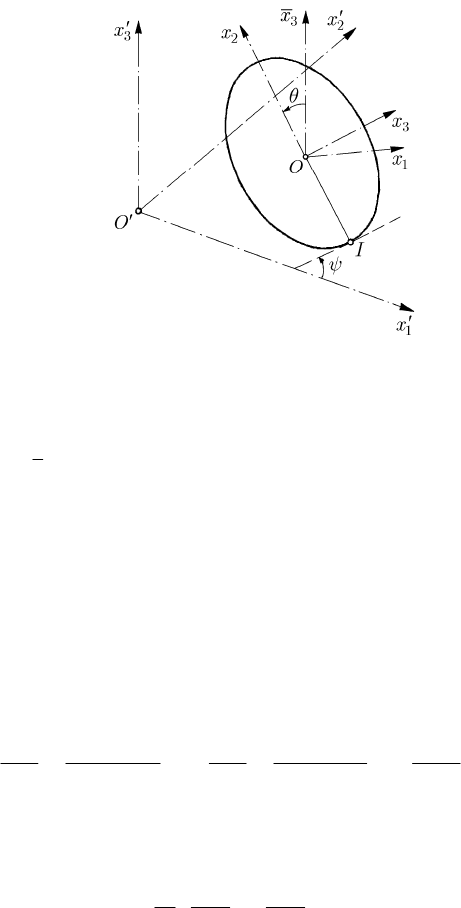
Fig. 22.20 Motion of a circular disc, which rolls without sliding on a fixed horizontal plane
Taking into account (22.4.28), we find Lagrange’s functions in the form
()( )
()
⎡
=+ ++ −
⎣
+−
⎤
⎦
2
*222
3
22
1
sin
2
cos cos ,
JMR I MR
JMgR
θϕψθ
ψθ θ
L
(22.4.29)
where
==
12
IIJ and
3
I are the central principal moments of inertia of the disc, while
gM is its weight.
Comparing the constraint relations (22.4.28) to the relations (22.2.88), we get
==
42 52
cos , sincR cRψψ,
the other coefficients being equal to zero; we notice that
() ()
+
∂∂
∂∂
=====
∂∂ ∂∂ ∂
,1
42 52
11
cos sin
0, 0, 0
hk
c
cc
RR
qqql
ψψ
θθ
,
so that the relations (22.4.17) are verified. In this case, Chaplygin’s equation is reduced to
Lagrange’s equations
⎛⎞
∂∂
−=
⎜⎟
∂
∂
⎝⎠
**
d
0
dt θ
θ
LL
,

Dynamics of Non-holonomic Mechanical Systems
503
which takes the form
()( )
()
+++ −
+−=
22
3
2
sin cos
sin cos sin 0,
JMR I MR
JMgR
θϕψθψθ
ψθθ θ
but we cannot write analogous equations corresponding to the generalized co-ordinates
ψ
and
ϕ .
We notice also that, in this case, the generalized co-ordinate
θ is not an ignorable
co-ordinate, because the kinetic potential
*
L depends explicitly on θ . But we can write a
first integral of the mechanical energy in the form
()( )
()
2
22 2 2 2
3
sin cos 2 cos 2 ,JMR I MR J MgR hθϕψθψθθ+++−+ + =
(22.4.30)
where
h
is the energy constant, which is determined by the initial conditions.
Let us consider now also the free motion of a homogeneous sphere, of radius
R and
mass
M
, on a horizontal plane
′′′
12
Oxx , the
′′
3
Ox -axis being directed towards the part
where is the sphere, the constraint relations being given by
12 21
0, 0xR xRωω
′′ ′′
−= −=
.
(22.4.31)
We introduce the quasi-velocities
5
1234
,,,,πππππ by means of the relations (see the
relations (5.2.35'))
()
()
′
≡= +
′
≡= −
′
≡= +
′
=− −
′
=+ −
11
22
33
41
5
2
cos sin sin ,
sin sin cos ,
cos ,
sin sin cos ,
cos sin sin ,
Rx
Rx
πωθψϕθψ
πωθψϕθψ
πωϕθψ
πθψϕθψ
πθψϕθψ
(22.4.32)
where we have used Euler’s angles
, θψ
and ϕ ; hence, it results
=− + +
=+
=−
′
=−
′
=− −
12 3
12
12
124
5
21
sin cot cos cot ,
cos sin ,
sin cos
,
sin sin
,
.
xR
xR
ψπψθπ ψθπ
θπ ψπ ψ
πψπ ψ
ϕ
θθ
ππ
ππ
(22.4.32')
Taking into account these relations, the kinetic energy
MECHANICAL SYSTEMS, CLASSICAL MODELS
504
()
′′ ′′′
=++++
⎡⎤
⎣⎦
222222
12 1 2 3
1
2
TMxxiωωω
,
(22.4.33)
where
i is the gyration radius with respect to a diameter of the sphere, takes the form
()()
()
=−+−+++
⎡⎤
⎣⎦
22
*2222
5
24 1 123
1
2
TMR R iππ ππ πππ
.
(22.4.33')
It results thus
()
()
()
()
∂
=+−
⎡⎤
⎣⎦
∂
∂
=+−
⎡⎤
⎣⎦
∂
∂∂
==−
∂∂
∂
=− −
∂
*
22
5
1
1
*
22
24
2
**
2
324
34
*
5
1
5
,
,
,,
.
T
MR i R
T
MR i R
TT
Mi M R
T
MR
ππ
π
ππ
π
πππ
ππ
ππ
π
The non-zero coefficients
j
i
k
γ are
11 22 33
23 32 31 13 12 21
1, 1, 1γγ γγ γγ=− = =− = =− = ,
44 55
13 31 23 32
, RRγγ γγ=− = =− = . The condition (22.4.21) is verified, as one can see
by a direct calculation. We notice also that
*
T does not depend explicitly on the
quasi-co-ordinates, so that the quasi-co-ordinates
1
π ,
2
π and
3
π are ignorable (they are
hidden too); the equations (22.4.20) lead to the first integrals (
=
**
TL
, the potential
energy being constant in the motion on a horizontal plane)
∂∂∂
===
∂∂∂
***
123
const, const, const
TTT
πππ
.
(22.4.34)
Putting
==
5
4
0ππ
, which corresponds to the constraint relations (22.4.31), we notice
that the first integrals (22.4.34) lead to
′′′
== == ==
11 22 33
const, const, constπω πω πω.
(22.4.35)
Taking into account the constraint relations (22.4.31), the kinetic energy (22.4.33) takes
the form
()( )
′′ ′
=+++
⎡⎤
⎣⎦
*222222
12 3
1
2
TMRi iωω ω
;
(22.4.36)
one obtains thus the first integral of the mechanical energy
()( )
′′ ′
+++=
22 2 2 22
12 3
2h
Ri i
M
ωω ω
,
(22.4.37)
the energy constant
h being determined by initial conditions.
Chapter 23
Stability and Vibrations
Some problems of stability of equilibrium and motion have been put in evidence, in
an incipient form, in the frame of Newtonian mechanics, in several of the preceding
chapters; but these problems need a more profound study, with a general character, in
the frame of Lagrangian or Hamiltonian mechanics. The motion of a mechanical system
S can take the form of linear or even non-linear vibrations; the corresponding
mechanical phenomenon needs a thorough study in a general form too.
After a study of the stability of discrete mechanical systems, one considers the
vibrations with a deterministic character of these systems. The corresponding
mechanical phenomena are linked between them, the vibrations around a stable position
of equilibrium playing a very important rôle.
23.1 Stability of Mechanical Systems
In the study of the behaviour of a mechanical system S , at rest with respect to an
inertial frame of reference, appears also the notion of stability, at a small change of its
configuration of equilibrium. In a qualitative definition, if the mechanical system
S
returns to its initial configuration, then the position of equilibrium is stable; otherwise,
it is instable. A first study for a particle has been made in Sects. 4.1.1.7 and in 7.2.3.
The respective problems are extended to the motion of a discrete mechanical system,
case in which intervene also the velocities of the particles at an initial state, which must
be maintained in certain limits to can speak about the stability of the motion. A study in
the frame of Hamiltonian mechanics, in the phase space
2s
Γ
, is interesting in this order
of ideas.
We will make, in what follows, a study of the stability of equilibrium and motion,
followed by various applications.
23.1.1 Stability of Equilibrium
After some introductory notions, we present the Lagrange–Dirichlet theorem and the
theorems of Lyapunov and Chetaev. Thus, important criteria concerning the stability of
equilibrium are given. We mention a detailed study of the linear systems too
(Chetaev, N.G., 1963; Lyapunov, A.M., 1949).
505
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009
MECHANICAL SYSTEMS, CLASSICAL MODELS
506
23.1.1.1 Introductory Notions
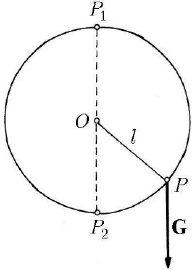
To fix the ideas, we start from a very simple particular case, that is the case of a
particle
P
of weight G , constrained to stay on a fixed smooth circle, situated in a
vertical plane (Fig. 23.1) (see Sects. 4.1.1.5 and 4.1.1.7 too); we have to do with an
ideal constraint. The positions of equilibrium are
1
P and
2
P . The problem is put
analogously in case of the mathematical pendulum (see Sect. 7.1.3.1).
By a small perturbation of the position of equilibrium
2
P , that is by a displacement
of the particle
P in a position sufficiently close to
2
P and imparting to it an initial
velocity of sufficiently small intensity, one obtains a motion in which the particle
P :
(i) remains in an arbitrarily small neighbourhood of the position of equilibrium
2
P ;
(ii) the kinetic energy (hence, the modulus of the velocity of the particle) remains
inferior to an as small as we wish quantity. The properties (i) and (ii) characterize the
stability of the position of equilibrium
2
P .
Fig. 23.1 Positions of equilibrium of a heavy particle on a smooth circle in a vertical plane
These ideas can be correspondingly generalized for a discrete mechanical system
S
(we will consider such systems in what follows), the position of which is specified by a
representative point
P in the configuration space
s
Λ or in the phase space
2s
Γ . Thus,
we say that a position of equilibrium of a discrete mechanical system
S is stable if,
after a sufficiently small perturbation of the corresponding representative point
P , with
sufficiently small arbitrary velocities, so that the magnitude of the kinetic energy of the
mechanical system
S be sufficiently small, it results a motion in which the
representative point
P occupies a position in a as small as we wish neighbourhood with
respect to the position of equilibrium, while the magnitude of the kinetic energy (hence,
the magnitude of the velocities of all particles (or of all rigid solids which form the
system) of the mechanical system
S ) remains inferior to an arbitrary small limit.
Otherwise, if the representative point
P leaves a neighbourhood of the position of
equilibrium or if the kinetic energy of the mechanical system
S is greater than a
positive number which does not depend on the initial conditions (hence, the magnitude
of the velocities of some of the particles have this property too), then the positions of
equilibrium is instable.
Stability and Vibrations
507
Returning to the problem previously considered, we see that the point
1
P is an
instable position of equilibrium (Fig. 23.1). As a matter of fact, this position is called
labile; if the radius of the circle tends to infinity, the circle becoming a horizontal
straight line, then the position of equilibrium is indifferent (also instable).
In general, we say that a position of a discrete mechanical system S is a position of
equilibrium if, at the initial moment, it had this position, with null velocities, and
remained – further – in the same position; obviously, this is valid for the representative
point
P too.
Let us suppose that the position of equilibrium is specified by the generalized
co-ordinates
12
, ,...,
s
qq q; corresponding to the first principle of Newton, the
generalized forces must vanish (
0, 1,2,...,
j
Qj s== ) in this case. The generalized
velocities
12
, ,...,
s
qq q must vanish too at the initial moment. If the generalized forces
depend, in general, both on the generalized co-ordinates and on the generalized
velocities (
12 12
( , ,..., , , ,..., ), 1,2,...,
ss
jj
QQqq qqq qj s==
), then the generalized
co-ordinates must correspond to the position of equilibrium, while the generalized
velocities must vanish. Without any loss of generality, we can choose the origin of the
co-ordinates just at the position of equilibrium of the representative point
P (the
equilibrium taking place for
====
12
... 0
s
qq q ); the non-zero generalized
co-ordinates of any other position of the representative point
P characterize a deviation
from the position of equilibrium, being called perturbations of the discrete mechanical
system
S .
The position of equilibrium is called stable position of equilibrium if, for initial
perturbations
0
j
q
sufficiently small and for initial generalized velocities
0
, 1,2,...,
j
qj s=
,
sufficiently small too (at the moment
=
0
tt), the mechanical system S does not leave an
arbitrary small neighbourhood, having – as well – arbitrary small velocities, in all the period
of motion. More precisely, if – for an arbitrarily given
> 0ε – one can determine
=>
0
(, ) 0tδδε , so that for ≥
0
tt the inequalities
<<=( ) , ( ) , 1,2,...,
jj
qt qt j sεε ,
(23.1.1)
take place, assuming that at the initial moment
=
0
tt
hold the inequalities
<<=
00
( ) , ( ) , 1,2,...,
jj
qt qt j sδδ ,
(23.1.1')
then the position of equilibrium
===0, 0, 1,2,...,
jj
qq j s , is stable; obviously,
without any loss of generality, we can take
=
0
0t . It is convenient to give a geometric
representation to the inequalities (23.1.1), (23.1.1') in a
2s -dimensional space
12 12
, ,..., , , ,...,
ss
qq q qq q . In the particular case = 1s , let be two vicinities of the
origin
O , corresponding to the mentioned inequalities, in the plane (
11
,qq ) (Fig. 23.2).
If the point
O corresponds to a stable position of equilibrium and if for a given > 0ε
one chooses a corresponding
> 0δ , then any motion which starts at the moment
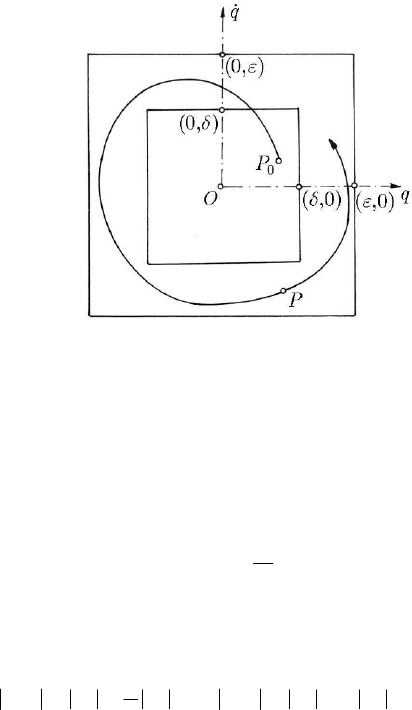
MECHANICAL SYSTEMS, CLASSICAL MODELS
508
0
t from the interior of a square of centre O and side 2δ remains in the interior of a
square which has the same centre and is of side
2ε .
Fig. 23.2 Motion around a stable position of equilibrium in a phase plane
Let be, for instance, the case of a non-damped linear oscillator, which leads to a
linear differential equation of the form (see Sect. 8.2.2.1 too)
+=
2
0qqω ;
(23.1.2)
putting the initial conditions
==
0000
() ,()qt q qt q, it results
0
00 0
0000
() cos ( ) sin ( ),
() cos ( ) sin ( ).
q
qt q t t t t
qt q t t q t t
ωω
ω
ωω
=−+−
=−−−
(23.1.2')
In this case
≤+ < ≤+ <
00 00
1
() , ()qt q q qt q qεωε
ω
(23.1.2'')
only if
<
0
||q δ and <
0
||q δ , where we choose, e.g., = min( /2 , /2)δεωωε.
We notice, in the above example, that, for finding a stable position of equilibrium, it
has been necessary to solve completely the initial value problem, hence to determine the
co-ordinates of the representative point
P ,
==
00 000 0
12 12
( ; , ,..., , , ,..., ), 1,2,...,
ss
jj
qqtqq qqq qj s
,
(23.1.3)
as functions of the initial conditions and of time (in the particular case
1s =
); it is
possible (the most times) to be not very simple to do it. Thus, it is worth to find a
stability criterion for the position of the equilibrium which does not need the integration
of the differential equation (or of the system of differential equations) of motion of the
discrete mechanical system.

Stability and Vibrations
509
It is necessary to make some observations before dealing with such a criterion. If
only the trajectory of the representative point
P remains in the neighbourhood of a
position of equilibrium, its velocities, in a perturbed motion, differing very much from
those in the non-perturbed motion, we say that the motion is orbitally stable.
Obviously, a stable motion is orbitally stable too; but an orbital stable motion is not – in
general – stable.
The notion of stability, introduced for a position of equilibrium, has been extended
also to the motion of a discrete mechanical system
S . If, to very small perturbations of
the initial conditions corresponds a motion which – from the point of view of the
trajectory of the representative point, as well as of its generalized velocities – remains
always in the neighbourhood of the non-perturbed motion, then the considered motion
is stable; otherwise, it is instable.
More precisely, let us denote by
( ), 1,2,...,2
i
xt i s=
, the state of the representative
point
P
in the phase space
2s
Γ (the generalized co-ordinates and the generalized
momenta, hence the canonical co-ordinates), in a non-perturbed motion the discrete
mechanical system
S ; let be, as well, ( ), 1,2,...,2
i
xt i s= , the corresponding
variables in a perturbed motion. If, an arbitrary
> 0ε being given, one can determine
=>
0
(, ) 0tδδε so that, for any ≥
0
tt, the inequalities
−<=( ) ( ) , 1,2,...,2
ii
xt xt i sε
,
(23.1.4)
take place, assuming that at the initial moment
0
tt= hold the inequalities
−<=
00
( ) ( ) , 1,2,...,2
ii
xt xt i sδ
,
(23.1.4')
then the motion of the representative point
P (hence, of the discrete mechanical system
S ) is stable.
We can express the above condition of stability also in the form
[]
=
−<
∑
2
2
2
2
() ()
s
ii
i
xt xt r
,
(23.1.5)
where
r is an as small as we wish real number; no one of the absolute values
| ( ) ( ) |, 1,2,...,2
ii
xt xt i s−=
, can be greater than r . If ()
i
xtare continuous
functions and if
r is sufficiently small, then the representative point
P
will be as close
as we wish from the representative point
P
, in the interior of the hypersphere
r
S ,
[]
2
2
2
1
() ()
s
ii
i
xt xt r
=
−=
∑
,
(23.1.5')
of centre
P
and radius r . Indeed, we can pass from one definition to another one,
observing that the point
P
is at the moment
0
t in the interior of a hypersphere S
δ
, of
radius
δ , and that, in the perturbed state, at the moment t , the point P is in the
interior of a hypersphere
S
ε
, of radius ε , concentric with S
δ
.

MECHANICAL SYSTEMS, CLASSICAL MODELS
510
A representative point
P , which verifies the inequality
[]
2
2
2
1
() ()
s
ii
i
xt xt r
=
−>
∑
,
(23.1.5'')
is exterior to the hypersphere
r
S ; hence, there exists at least an absolute value
| ( ) ( ) |, 1,2,...,2
ii
xt xt i s−=
, which is greater than the value r . Hence, if r is
sufficiently great, the condition (23.1.5'') corresponds to instable motion.
Let
==
12 2
d
( , ,..., ; ), 1,2,...,2
d
i
i
s
x
Xxx x t i s
t
,
(23.1.6)
be a system of
2s differential equations of first order, e.g., Hamilton’s canonical
equations; we assume that the gives functions
, 1,2,...,2
i
Xi s= , satisfy the conditions
of the Cauchy-Lipschitz theorem of existence and uniqueness (see Sect. 19.1.1.4). We
make firstly a study of the stability of a certain solution
( ) 0, 1,2,...,2
i
xt i s==
, of
this system, which – obviously – verifies the relations
()
12 2
d()
( ), ( ),..., ( ); , 1,2,...,2
d
i
i
s
xt
Xxtxt x tti s
t
==
.
(23.1.6')
Subtracting the differential equations (23.1.6), (23.1.6') one from the other and
making the change of functions
( ) ( ) ( ), 1,2,...,2
iii
xt xt yt i s=+ =
, we may write
()
[]
11 22 2 2
12 2
d
( ), ( ),..., ( );
d
( ), ( ),..., ( ); , 1,2,...,2 ,
i
i
ss
s
y
Xy xty xt y x tt
t
xtxt x tt i s
=+ + +
−=
(23.1.7)
obtaining thus the system of differential equations of the perturbed motions, called so
by Alexandr Mikhailovich Lyapunov; this denomination is due to the fact the variables
i
y are equal to the perturbations ( ) ( ), 1,2,...,2
ii
xt xt i s−=
. This system admits –
obviously – the solutions
0, 1,2,...,2
i
yi s== , which can be considered as
corresponding to a configuration of equilibrium. Thus, the passing from the system
(23.1.6) to the system (23.1.7) means the passing from the study of the stability of
motion to the study of the stability of a configuration of equilibrium; hence, we will
begin with the study of the position of equilibrium of the representative point
P .
Without any loss of generality, we can return to the system of equations (23.1.6),
assuming that the solutions
12 2
... 0
s
xx x=== = are verified; hence, we study the
stability of these solutions.
If, an arbitrary
0ε > being given, one can determine
0
(, ) 0tδδε=>, so that, for
any
0
tt> , the inequality
22 2
12 2
() () () ... ()
s
txtxt xtρε=+++<
(23.1.8)
Stability and Vibrations
511
takes place, assuming that, at the moment
0
tt= , holds the inequality (
0
0
()
ii
xt x= ,
1,2,...,2is= )
() () ( )
22 2
00 0
0
12 2
...
s
xx xρδ=+++<,
(23.1.8')
then the trivial solution
0, 1,2,...,2
i
xi s== is stable in Lyapunov’s sense.
Otherwise, the motion is instable. The Cauchy–Lipschitz theorem ensures the existence
and the uniqueness of the solution and, as well, of the continuous dependence of it at
the initial data in the vicinity or the moment
0
tt= . To introduce the notion of stability
in Lyapunov’s sense, it is necessary to can prolong the non-perturbed solutions, as well
as all the perturbed solutions for any
0
tt> . Hence, the stability problem is the
problem of its continuous dependence on the initial data on an infinite interval of time.
If the above solution is stable in Lyapunov’s sense and if there exists
0δ > , so that the
condition (23.1.8') be verified, the condition
22 2
12 2
lim ( ) lim ( ) ( ) ... ( ) 0
s
tt
txtxtxtρ
→∞ →∞
=+++=
(23.1.8'')
being also involved, then we say that the solution is asymptotically stable (or
completely stable); hence, the point
P of the perturbed position tends to the position of
stable equilibrium in an infinite time. The domain in the space
2s
Γ for which any
motion which starts from a point of it is asymptotically stable is called domain of
attraction of the point
0, 1,2,...,2
i
xi s== ; if this domain is just the whole space,
then the corresponding solution is called globally stable.
If the functions
12 2
( , ,..., ; ), 1,2,...,2
ii
s
XXxx xti s==, depend explicitly on
time, then the system of differential equations (23.1.6) is non-autonomous; otherwise,
hence if
12 2
( , ,..., ), 1,2,...,2
ii
s
XXxx x i s==, the system is called autonomous or
dynamical.
Let us consider now an autonomous system and let us suppose that the solutions
( ), 1,2,...,2
i
xt i s= , correspond to periodical motions; the trajectory C in the phase
space will be closed. Let be a point
PC
′
∈ and a point P is the neighbourhood of this
curve; by definition, the distance from the point
P to the curve C is given by
d( , ) inf {d( , ), }PC PP P C
′′
=∈.
If, being given
0ε >
arbitrary, there exists
0
(, ) 0tδδε=>, so that any solution
12 2
( ), ( ),..., ( )
s
xtxt x t which passes through the point
00 0
0
12 2
( , ,..., )
s
Px x x of
2s
Γ at
the moment
0
tt=
and fulfils the condition
0
d( , )PC δ<
(23.1.9)
has the property