Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
482
We can thus write
=== == =
∂
∂
⋅δ = ⋅ δ = ⋅ δ = δ
∂∂
∑∑∑ ∑∑ ∑
a
ar aB a
111 11 1
nnh hn h
i
ii i ii ij j ii j
jj
iij ji j
S
mm mπππ
ππ
,
where we have introduced the acceleration energy (22.3.1). As well,
=== =
⋅δ = ⋅ δ = δ
∑∑∑ ∑
Fr FB
*
111 1
nnh h
ii iijj jj
iij j
Qππ
,
with the quasi-forces
=
=⋅ =
∑
FB
*
1
, 1,2,...,
n
jiij
i
Qjh.
(22.3.9)
The theorem of virtual work, written in the form (18.2.27), leads to
=
∂
⎛⎞
−δ=
⎜⎟
∂
⎝⎠
∑
*
1
0
h
jj
j
j
S
Q π
π
;
the variations
δ
j
π being independent, there result the Gibbs–Appell equations
∂
==
∂
*
, 1,2,...,
j
j
S
Qj h
π
,
(22.3.10)
the number of which is equal to the number of kinetic degrees of freedom. We have
thus
h differential equations of second order, to which we associate m non-holonomic
constraint relations (22.1.19), (22.1.20), for the
s unknowns , 1,2,...,
k
qk s= ; thus,
the number
+=hms of equations will be equal to the number of unknowns.
In particular, we can take as quasi-co-ordinates just the independent generalized
co-ordinates. If the mechanical system is holonomic (
0, mhs==), then the
Gibbs-Appell equations become
∂
==
∂
, 1,2,...,
j
j
S
Qj s
q
,
(22.3.11)
obtaining a system of equations equivalent to Lagrange’s equations.
22.3.2 Applications
We present in what follows some applications of the Gibbs–Appell equations to the
motion of a rigid solid with a fixed point, as well as to the motion of a disc on a
horizontal plane or to the motion of a sphere on an inclined plane or on a horizontal
plane in uniform motion.

Dynamics of Non-holonomic Mechanical Systems
483
22.3.2.1 Motion of a Rigid Solid with a Fixed Point
Let be a rigid solid S , which is rotating with the angular velocity ω about the
fixed point
′
≡OO
, with respect to an inertial frame of reference
′
R and to a
non-inertial frame
R , which is rotating about the fixed frame with the angular
velocity
Ω . The velocity of a point P of the rigid solid with respect to the inertial
frame is given by
′
=×
vrω , where r is the position vector with respect to both
frames of reference. In this case, the acceleration
′
a is obtained in the form
() ()
()
[]
()
()
()
()
∂
′
=×+××=×+×−×+××
∂
=× × −×+×× +× ×
ar rr r r
rr r r
,
t
ωΩωωωωΩ Ωω
ωω ωω Ω Ωω
where we have taken into account the relation (A.2.37), which is linking the derivative
with respect to the fixed frame to the derivative with respect to the movable one; using
the relations (2.1.49), (2.1.50') too, we obtain, finally,
()
′
=⋅ − −× =+×arrr
2
,
ωωω
χχ
ωΩω.
(22.3.12)
Projecting on the axes of the frame of reference
R , it results
()
()()
()
()
()
()()
()
′
=− + + − + +
′
=+−++−
′
=−++−+
22
32
123112 213 3
22
31
212 131223 3
22
21
331 132 2123
,
,
,
axxx
axxx
axxx
χχ
ω ω ωω ωω
χχ
ωω ω ω ωω
χχ
ωω ωω ω ω
(22.3.12')
with
=+ −
=+ −
=+ −
1
12332
2
23113
3
31221
,
,
;
χ
ωΩωΩω
χ
ωΩωΩω
χ
ωΩωΩω
(22.3.12'')
The acceleration energy is thus given by
()
′ ′′′
=++
∫∫∫
r
222
123
1
()d
2
V
S aaa Vμ ,
where
r()μ is the density and V is the volume of the solid. We can choose the
quasi-co-ordinates so that
, 1,2,3
kk
kπω== . Because we are interested only in the
dependence on
k
π , hence on
k
ω
, we hold back in the expression of
′
2
1
a only the terms
()()
()
()()
[]
′
=− +−
++ − + − −
222
3322
1122133
22
32 2323
23 12 13 12 3 23
22
22 ;
axx
xx xx xx
χχχχ
ωω ωω
χχ χχχχ
ωω ωω ω

MECHANICAL SYSTEMS, CLASSICAL MODELS
484
we proceed analogically for
′′
22
23
,aa. Taking into account the definitions given in Sect.
3.1.2.1 for the moments of inertia, we can calculate the part
O
S of
′
S
, which is of
interest in what follows. We can assume, without any loss of generality, that the axes of
the frame of reference are rigidly linked to the rigid solid
S ; in this case, =Ωω, so
that
, 1,2,3
k
kk
k
χ
ωπ== =
. If, for the sake of simplicity, we choose the principal
axes of inertia of the rigid solid at the fixed point
O as axes , 1,2,3
k
Ox k = , we
obtain
()
()
() ()
′
=+++−
+− + −
222
11 22 33 3 2 123
13231 21312
1
2
,
SIII II
II II
πππ πππ
πππ πππ
(22.3.13)
where we have put in evidence the principal moments of inertia.
Observing that the work of the moments of the given forces with respect to the given
pole is expressed in the form
==
⋅= =
∑∑
M
33
11
ddd
jj j j
O
jj
tMtMωπω ,
it results
==,1,2,3
j
Oj
QMj . In this case, the Gibb–Appell equations (22.3.11) lead
to Euler’s equations (15.1.11'').
In the particular case in which the ellipsoid of inertia of the rigid solid is of rotation,
we can choose as axis of inertia just the
3
Ox -axis. In this case
1122
, ΩωΩω==, but
≠
33
Ωω; all the centrifugal moments of inertia vanish and ==≠
12 3
IIJI. We
obtain
() ()
=+ − =− − =
122
123 3 213 3 3
,,
χχχ
πππΩ πππΩ π ,
so that
()
[]
()( )
′
=+++− −
1 2 33 33 3 12 21
1
2
SJ I IJππ π π Ωππππ
,
(22.3.14)
where we have neglected the terms which do not contain quasi-accelerations. The
Gibbs-Appell equations will be of the form
()
()
+− =
−− =
=
133 32
1
233 31
2
3
3
,
,
,
O
O
O
JIJ M
JIJ M
IM
ππωπ
ππωπ
π
(22.3.15)
where
, 1,2,3
Oj
Mj= , are the components of the resultant moment M
O
with respect
to the fixed pole.

Dynamics of Non-holonomic Mechanical Systems
485
22.3.2.2 Motion of a Heavy Circular Disc on a Horizontal Plane
Using the Gibbs–Appell equations, we take again the problem of motion of a heavy
circular disc, of radius
R and mass M , on a horizontal plane, problem considered in
Sect. 22.2.3.2 in quasi-co-ordinates (see Fig. 22.1). To calculate the acceleration
energy, we use the Theorem 22.3.1. We notice that the acceleration energy with respect
to the pole
O is given by (22.3.14); to calculate the acceleration energy of the mass
centre
O . we calculate firstly the acceleration
′
a
O
of this point.
The velocity of the contact point
I must vanish; hence,
′′
=+×=
vv
IO
OI 0
J
JG
ω
,
wherefrom we get the components of the velocity
′
v
O
in the form
′′ ′
==− =
32
12 3
0, ,
OO O
vvRvRωω.
The acceleration will be given by
′′ ′
=∂ ∂ + ×
av v/
OO O
t Ω , so that
(
1122
, ΩωΩω==
)
()
()()
′′ ′
=+ =−+ =−
2
233 312 213
12 3
,,
OO O
aR a R aRωΩω ωωω ωωω
;
taking into account
, 1,2,3
jj
jωπ== , we obtain
()
′
=++ −
⎡⎤
⎣⎦
2222
23 12332
2
O
aRππ πππππ ,
(22.3.16)
where we have neglected the terms which do not contain the characteristics, The
acceleration energy of the disc is thus given by
()( )
()()()
′
=++ ++
⎡⎤
⎣⎦
+−+−−
13
222 22
3
2
123 32 33 3 12 21
1
2
.
SJJMR IMR
MR I J
ππ π
πππ ππ π Ω ππ ππ
(22.3.17)
The work of the weight will be
=−
44
dcosdQq MgR θθ, where we have used the
notations in Sect. 22.2.3.2.
In the considered case we have = 5s generalized co-ordinates, linked by = 2m
non-holonomic relations; hence,
=− =−=52 3hsm . The Gibbs–Appell equations
read
()
()( )
()
+− =
+−+ +=−
++ =
133 32
22
23 13 31
22
3312
0,
cos ,
0.
JIJ
JMR I MR J MgR
IMR MR
ππΩπ
πππΩπθ
πππ
(22.3.18)
Observing that
32 3 32
, ψθϕ ψθ
′′
=++ =+
ii i iiωΩ, of components (along the
axes of the frame of reference
R ),
123
sin , , cosω ψ θω θω ψ θ ϕ=− = = +
,
MECHANICAL SYSTEMS, CLASSICAL MODELS
486
the system of differential equations (22.3.18) becomes (
, 1,2,3
kk
kπω== )
()
()( )
()
33
22 2
33
22
33
sin 2 cos ,
sin sin cos cos ,
sin ,
JI
JMR I MR J MgR
IMR MR
ψθ ψθθ ωθ
θωψθψθθθ
ωψθθ
+=
+++ − =−
+=
(22.3.18')
with the unknown functions
(), ()ttψψ θθ== and =
33
()tωω .
The first equation (22.3.18') takes the form
()
=
2
3
3
d
sin sin
d
J
It
ψθωθθ
.
(22.3.18'')
To obtain the differential equations which define
3
ω and ψ
as functions of
θ
, we
write the third equation (22.3.18') and the equation (22.3.18'') in the form
()
⎛⎞
++= −+=
⎡⎤
⎜⎟
⎣⎦
⎝⎠
33
2
3
2
3
d
d
10,10
dd
I
J
u
uIu
MR
ω
ψψω
,
where we have used the change of variable
= cosu θ . Eliminating the unknown
functions
3
ω and ψ
, respectively, we obtain
() ()
⎡⎤
−−=−−=
⎢⎥
⎣⎦
2
3
22
3
2
d
dd
10,10
dd
d
uu
uu
u
ω
ζ
λω λζ
,
(22.3.19)
with the notation
()
=− =
+
2
3
2
2
3
1,
I
MR
u
J
IMR
ζψλ
.
(22.3.19')
The disc being homogeneous, we have
=
3
2IJ, so that
=
+
2
2
3
2MR
IMR
λ
.
(22.3.19'')
If the disc is whole, then =
2
3
/2IMR and it results = 4/3λ , while if the disc is
reduced to its circumference we have
=
2
3
IMR and = 1λ ; analogically, one can
consider also the case of a circular annulus. We mention that the first equation (22.3.19) is
of Legendre type, which defines the hypergeometric functions (see Sect. 22.2.3.2 too).
The theorem of uniqueness allows to state that the system (22.3.18') has the solution
== = =
3
0, , , const
2
π
ψθ ωωω
,
(22.3.20)
Dynamics of Non-holonomic Mechanical Systems
487
if this one corresponds to the initial conditions; in this case, the point of contact
describes a straight line (
=
constψ
), the plane of the disc remaining normal to the
fixed plane (
= /2θπ), while the rotation of the disc is uniform
(
=+ =
00
,consttϕω ωω ). If we put =+/2θπ ε, =ψξ
and =+
3
ωωη in the
equations (22.3.18') and if we linearize the system thus obtained, then we can write
()( )
=+++ ==
22
33
,,0JI JMR IMR MgRξωε ε ωξ εη
,
wherefrom
()( )
+++ − =
⎡⎤
⎣⎦
222
33
0J J MR I I MR JMgRεωε
;
if
()
+>
22
33
II MR JMgRω , then the solution is stable, in a first approximation.
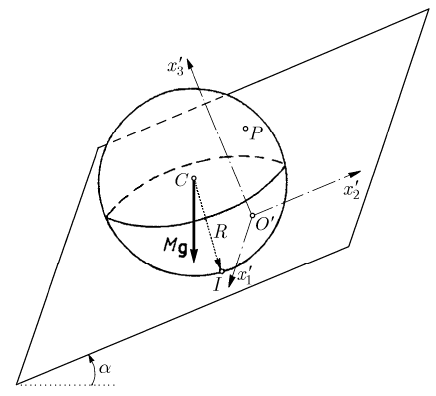
22.3.2.3 Motion of a Heavy Sphere on an Inclined Plane
Let be now the case of a heavy homogeneous sphere, of radius R and mass M ,
which has a motion of rolling without sliding on a plane inclined by an angle α with
respect to a horizontal plane. We choose, in the inclined plane, the
′′
2
Ox -axis along the
direction of maximal inclination and the
′′
1
Ox -axis parallel to the horizontal plane; the
Fig. 22.17 Motion of a heavy sphere on an inclined plane
′′
3
Ox -axis is normal to this plane (Fig. 22.17). A point
P
of the sphere will be
specified by the co-ordinates
′′′
=
123
,,xxx R of the centre
C
of the sphere and by
Euler’s angles
,ψθ and ϕ . Because the sphere rolls without sliding, it results that the
velocity of the contact point
I
must vanish, so that
MECHANICAL SYSTEMS, CLASSICAL MODELS
488
′′
=+×=
vv
IC
CI 0
J
JG
ω ,
where ω is the rotation velocity of the movable frame, rigidly linked to the sphere.
Projecting on the axes of the fixed frame of reference, we obtain the non-holonomic
constraint relations
′′ ′′
−= +=
12 21
0, 0xR xRωω;
(22.3.21)
we can thus define the quasi-co-ordinates
123
,,πππ by the relations (5.2.35') in the
form
′
== +
′
==− +
′
== +
11
22
33
sin sin cos ,
sin cos sin ,
cos .
πωϕθψθψ
πω ϕθψθψ
πωϕθψ
(22.3.22)
The acceleration energy is given by
()( )
()( )
()()
′′ ′′′
=++++
⎡⎤
⎣⎦
′′ ′
=+ ++
⎡⎤
⎣⎦
=+ ++
⎡⎤
⎣⎦
12 1 2 3
12 3
22 2 2 2
222 2
222 2
12 3
1
2
1
2
1
,
2
SMxxI
IMR I
IMR I
ωωω
ωω ω
ππ π
(22.3.23)
where we took into account (22.2.21), (22.2.22) and where
I is the moment of inertia of
the sphere with respect to one of the diameters. The work of the own weight is given by
′′
=− =− =
21 111
sin d sin d sin d dMg x Mg t MgR Qαωα αππ,
because
′
=
3
d0x .
The Gibbs–Appell equations read
()
+=− ==
2
123
sin , 0, 0IMR MgRπαππ
;
(22.3.24)
it results, by integration,
=− + = = =
+
112233
2
sin
,,,
MgR
Kt C C C K
IMR
α
πππ
,
(22.3.24')
where
123
,,CCC are arbitrary constants. The co-ordinates of the point P of the sphere
will be thus given by the equations
′′′ ′
=+ = ++
2
12 22 1 1
1
,
2
xCRtCx KRtCRtC
,
(22.3.25)

Dynamics of Non-holonomic Mechanical Systems
489
()
[]
()
()
[]
=+ + +
=− + +
=− + +
12 3
12
12
sin cos cot
cos sin ,
sin cos cosec .
Kt C C C
Kt C C
Kt C C
ψψψθ
θψψ
ϕψψθ
(22.3.25')
If the sphere moves on a horizontal plane (
= 0α ), then it results = 0K and the
mass centre has a uniform and rectilinear motion; in the case in which
≠ 0α , the mass
centre is moving along a parabola of axis parallel to the
′′
2
Ox -axis or along the
direction of this axis if the initial velocity (for
= 0t ) vanishes ( ==
12
0CC ) or is
along a parallel to it (
=
2
0C ).
22.3.2.4 Motion of a Sphere on a Horizontal Plane in Uniform Rotation
Let us consider the motion of a homogeneous sphere, of radius R and mass
M
, on
a horizontal plane
′′′
12
Oxx , which has a uniform rotation of angular velocity
Ω
about
the vertical axis
′′
3
Ox ; the axes
′′
1
Ox and
′′
2
Ox are fixed in the plane of rotation. The
problem has been previously studied in Sect. 22.2.3.3 (see Fig. 22.13). The constraint
relations (22.2.65) can be written in the form
′′′′ ′′
=− =−+
1222 11
,xR xx R xωΩ ωΩ,
(22.3.26)
′′
12
,xx and
′
=
3
xR being the co-ordinates of the centre C of the sphere; there result
the acceleration
() ()
′′ ′′′ ′ ′′
=+ − =−+ −
12 112 1 22
,xR R xx R R xωΩωΩ ωΩωΩ
,
the acceleration of the centre
C
being given by
()
()()
[
]
222222
12 1 2 21 1 12 2
2,
C
axxR R R x R xωω ΩωωΩ ωωΩ
′′′ ′′ ′′ ′′′ ′
=+= + + − − −
where we have ignored the terms which do not contain derivatives of second order of
the quasi-co-ordinates, specified by
1122
, ωπωπ
′′
==.
The acceleration energy is given by ( =
2
IMi, where I is the central axial moment
of inertia,
i is the corresponding gyration radius and
′
=
33
ωπ )
()()( ){
()()
[]
}
′
=+++= ++
⎡⎤
⎣⎦
′′
++ − − −
222 2 2 22 2 2
123 12
22
3211122
11
22
2;
C
SMai MRi
iRRx Rx
πππ ππ
πΩππΩππΩ
(22.3.27)
observing that
*
0, 1,2, 3
j
Qj== , the Gibbs–Appell equations relative to the
quasi-accelerations
k
π lead to the equations (22.2.70), (22.2.70'), studied in Sect.
22.2.3.3.
If we use the quasi-accelerations
12 3 3
, , xxωπ
′′′
=
and notice that

MECHANICAL SYSTEMS, CLASSICAL MODELS
490
() ()
′′′′′′
=− − =− +
121212
11
,xx xx
RR
ωΩωΩ
,
then the acceleration energy is written in the form
()
()
()
()
⎧
⎡⎤ ⎫
′′ ′′′′
=+ +++ −
⎨
⎬
⎢⎥
⎩⎣ ⎦ ⎭
22
2222
12 3 1221
1
12
2
ii
SM xx i xxxx
RR
πΩ
,
(22.3.27')
where, as well, we maintained only the terms which contain quasi-accelerations.
Assuming that upon the sphere acts a system of arbitrary given forces, the torsor of
which at the centre
C is given by R and M , of the components ,, 1,2,3
jj
RM j= ,
and writing the constraint relations (22.3.26) by means of the virtual displacements in
the form (
, 1,2,3
jj
j
ωπ
′
==
)
′′
δ=δ δ=−δ
122 1
,xR x Rππ,
(22.3.26')
we obtain the virtual work
′′′
δ=⋅δ+⋅δ=δ+δ+δ+δ+δ
⎛⎞⎛⎞
′′
=+ δ+− δ+δ
⎜⎟⎜⎟
⎝⎠⎝⎠
Rr M
11 22 11 22 3 3
21
112233
;
WRxRxMMM
MM
RxRxM
RR
πππ
π
π
hence,
***
112 221 3 3
/, /, QRMRQRMRQM=+ =− =.
The Gibbs–Appell equations (22.3.10) lead to
()
()
()
()
′′
++ = +
⎡⎤
⎣⎦
′′
+− = −
⎡⎤
⎣⎦
=
22 2
12 12
22 2
21 21
2
33
,
,
.
MR ix ix RRR M
MR ix ix RRR M
Mi M
Ω
Ω
π
(22.3.28)
If the sphere is subjected only to the action of the own weight, then
0, 1,2, 3
jj
RM j== = , and we find again the equations (22.2.70), (22.2.72).
Assuming now that the plane which is rotating is inclined by the angle
α with respect
to the horizontal plane, we have
=
2
sinRMgα , the other components of the torsor
vanishing.
Denoting
12
i, i 1zx x=+ =−, we can write the system (22.3.28) in the form
−= = =
++
22
22 22
sin
ii, ,
iRg
zkzkK K
Ri Ri
Ωα
,
(22.3.29)
the solution being given by
=+ −
i
12
kt
K
zC Ce t
k
;
(22.3.29')
Dynamics of Non-holonomic Mechanical Systems
491
the complex constants
12
,CC are determined by initial conditions.
22.4 Other Problems on the Dynamics of Non-holonomic
Mechanical Systems
We will consider also other aspects of interest concerning non-holonomic problems;
let us thus mention the collisions – phenomena with discontinuity – as well as the
obtaining of first integrals for the equations of motion.
22.4.1 Collisions
The phenomenon of collision is due to the apparition of some percussive forces or to
the sudden application of some non-holonomic constraints; in what follows, we present
the discontinuous phenomena which put in evidence both cases.
22.4.1.1 Basic Equations
From the very beginning, we notice that the non-holonomy does not introduce
something essential from the point of view of the percussions, defined by the same
formula (10.1.40) in the form
′′
′
′′ ′
−→+
=
∫
PF
00
lim ( )d
t
t
tt
tt,
(22.4.1)
where
F is a percussive force, the limit being considered in the sense of the theory of
distributions in the collision interval
[, ], | | , 0tt t t εε
′′′ ′′ ′
−< > arbitrary, which
contains only one moment of discontinuity
0
t . The corresponding general theorems are
given in Sect. 10.1.2.3, and the general study for a single particle is presented in Sect.
13.1.1.2.
Corresponding to the theorem of momentum 13.1.2, stated in the space
3
E , we can
pass to the Theorem 18.3.1, stated in the space of configurations
s
Λ , according to
which the jump of the generalized momentum of a discrete mechanical system
subjected to constraints, corresponding to a generalized co-ordinate, at a moment of
discontinuity is equal to the sum of the given and constraint generalized percussions,
corresponding to the same co-ordinate and which act upon this system at that moment.
We assume that, in the interval of percussion, both the generalized co-ordinates
+
12
1
, ,..., , ,...,
s
hh
qq qq q of a representative point P and the kinematic characteristics
0
, , 1,2,..., , 1,2,...,
kj k
aa k mj h== of the constraint relations (22.1.1) or (22.1.1')
remain constant. As in case of the Chaplygin system (see Sect. 22.2.4.1), we assume
that the generalized velocities corresponding to the first
h co-ordinates can be
considered to be independent and that the other
−sh co-ordinates do not intervene in
the coefficients
,,0
, , 1,2,..., , 1,2,...,
hkj hk
cc k shj h
++
=−=, of the non-holonomic
constraint relations, written in the form (the matrix
[]
kj
a is of rank h )
+++
=
=+=−
∑
,,0
1
, 1,2,...,
h
j
hk hkj hk
j
qcqck sh ;
(22.4.2)