Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
462
this point with respect to the fixed frame, given by
222
12
(cos)(sin)
C
vxl xlθθ θθ
′′ ′
=− +−
, replacing the moment of inertia
2
Mi by
−
22
()Mi l , corresponding to Koenig’s theorem; one obtains thus
()
′′′′′
=+− ++
⎡⎤
⎣⎦
22 22
0
12 1 2
1
2cos sin
2
TMxxlx x iθθ θθ
.
(22.2.77')
We denote by
′
1
T and
′
2
T the kinetic energies of the two wheels; we can write
()
′′
=+++v
2
2222
2112233
11
22
C
Tm I I Iωωω,
where
k
I are the principal moments of inertia of the respective wheel with respect to its
centre, while
, 1,2,3
k
kω = , are the corresponding angular velocities, along the
directions of the axes of the movable frame; we notice that
==
23
III,
1
I corresponding to the axis
21
Cx, while
122 3
, 0, ωϕω ω θ===
. Because
2
22
112 2
(sin)(cos)
C
xa xaθθ θθ
′′ ′′ ′
=− ++
vii
, it results
()
{}
′′′ ′′
=++− −++
⎡⎤
⎣⎦
2222 2 2
212 12 12
1
2sin cos
2
Tmxxa ax x IIθθ θ θθϕ
;
(22.2.78)
analogically
()
{}
′′′ ′′
=+++ −++
⎡⎤
⎣⎦
2222 2 2
112 12 11
1
2sin cos
2
Tmxxa ax x IIθθ θ θθϕ
.
(22.2.78')
Finally, the kinetic energy
′′′′
=++
0
12
TTTT is expressed in the form
() ()
()
′′′′′
=++++
⎡⎤
⎣⎦
′′
=+ = + +
22 2 22
12 112
22
1
,
2
2, 2 ,
TMxxII
MMmI Ima Mi
θϕϕ
(22.2.79)
if
≡CO
, and in the form
() ()
()
22 2 22
12 112 1 2
1
2cos sin
2
TMxxII Ix xθϕϕ θθ θ
′′′′′ ′ ′
=++++− +
⎡⎤
⎣⎦
(22.2.79')
in the general case.
Writing Lagrange’s equations, one must not take into account the constraint relation
(22.2.76) in the expression of the kinetic energy (22.2.79'); it can be used only after
writing these equations. As well, we notice that the own weight (the only force which is
applied upon the mechanical system) does not produce work; hence, the generalized
forces vanish. We can thus write the first integral of mechanical energy in the form
(valid also if the centre of mass is not at
O )
Dynamics of Non-holonomic Mechanical Systems
463
() ()
′′ ′ ′
+++ +=
22 2 22
12 112
2Mx x I I hθϕϕ
,
(22.2.80)
where
h is the energy constant.
Using the general form (22.2.14) of the constraint relations, the relations (22.2.73'),
(22.2.76) allow to write
== =− ==−=
== =− =−==−
== = ===
10 11 12 13 14 15
20 21 22 23 24 25
30 31 32 33 34 35
0, sin , cos , , , 0,
0, sin , cos , , 0, ,
0, cos , sin , 0, 0, 0.
aa a aaaRa
aa a aaaaR
aa a aaa
θθ
θθ
θθ
Limiting ourselves to the case
≡CO ( = 0l ), Lagrange’s equations with
multipliers (22.2.13) are written in the form
() ()
()
′′ ′′
=+ + =−+ +
′
= − =− =−
112 3 2 12 3
12 11 112 2
sin cos , cos sin ,
,,.
Mx Mx
IaIRIR
λλ θλ θ λλ θλ θ
θλλ ϕ λ ϕ λ
(22.2.81)
Eliminating Lagrange’s multipliers
12
,λλ between the last three equations, we get
()
′
=− −
11 2
a
II
R
θϕϕ
,
wherefrom
()( )
′′
=− − + +
11 2 1 2
a
II ICtC
R
θϕϕ ,
(22.2.82)
12
,CC being two integration constants. From (22.2.75), (22.2.82) it results
−
=+ = = +
−
−= + =+
′
12
21
12
() , , ,
22
2
,.
2
CCk
RR
tt k
aK a K
Ck I
aRa
tK
RK aRI
θωψω ψ
ϕϕ ω
(22.2.83)
Eliminating the multipliers
3
λ between the first two equations (22.2.81) and then the
multipliers
12
,λλ, by means of the last two equations of Lagrange, we can write
()()
′′ ′
−=+=−−
1
12 12 12
sin cos
I
Mx x
R
θθλλ ϕϕ ;
we notice that
()
′′ ′′
−= − =−+=+
12 12 1 2
d
sin cos sin cos
d
x x x x aR aR
t
θθ θθθϕθϕ
,
MECHANICAL SYSTEMS, CLASSICAL MODELS
464
where we took into account the constraint relations (22.2.75), (22.2.76). Observing that
= 0θ
, it results ==
12
0ϕϕ , so that
() ()
=+ =+
=+ =−
=+ − =− −
111222
00
12
00
12
() , () ,
,,
,,
tt tt
aa
RR
aa
kk
RR
ϕωψϕωψ
ωω ωωω ω
ψψ ψ ψψ ψ
(22.2.83')
the angles
12
,,θϕ ϕ depending thus on the angular velocities ω and
0
ω and on the
non-dimensional constants
0
,,k ψψ , which are determined by initial conditions. In this
case, the relation (22.2.74) can be written in the form
′′
−=
0
12
sin cosxx Rθθω ;
taking into account the relation (22.2.76) too, we obtain also the co-ordinates of the
point
O
() ()
′′ ′′
=− + =− +
00
00
11 22
cos , sin ,xx R t xx R t
ωω
ωψ ωψ
ωω
(22.2.83'')
where the constants
′′
00
12
,xx
are specified by the initial conditions too.
Lagrange’s multipliers
== =
0
12 3
0, Rλλ λ ωω
,
(22.2.84)
and the generalized constraint forces
() ()
=+=+
===
00
12
5
34
cos , sin ,
0
RR t RR t
RRR
ωω ω ψ ωω ω ψ
(22.2.84')
are determined by the equations (22.2.81).
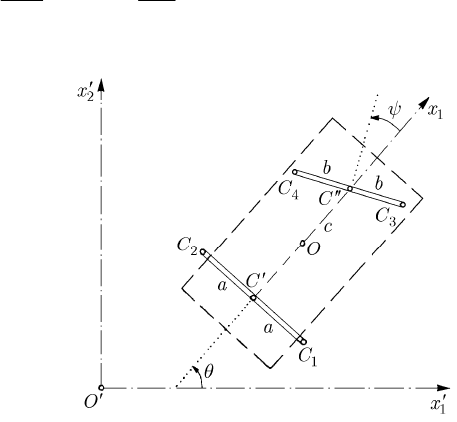
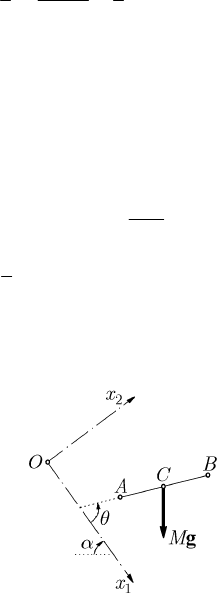
22.2.3.5 Motion of the Four-Wheeled Carriage
Let be a carriage with four wheels, of centres
123
,,CCC
and
4
C
, which are rotating
independently by the angles
123
,,ϕϕϕ and
4
ϕ , respectively; we denote by
′
C
and
′′
C
the middles of the two axles and take the pole
O
of the movable frame of reference at the
mass centre, considered to be situated on the straight line
′′′
CC
, which is taken as
1
Ox
-axis and is parallel to the plane
′′′
12
Oxx . The
1
Ox
-axis makes the angle
θ
with the
′′
1
Ox -axis, while the
3
Ox
-axis is parallel to the
′′
3
Ox -axis. The two axes of the wheels are
of lengths
2a
and
2b
, respectively, and make the angle
ψ
between them (Fig. 22.15). The
wheels of centres
1
C
and
2
C
are of radii
′
R
and masses
′
m
, while the wheels
3
C
and
4
C
are of radii
′′
R
and masses
′′
m
; the mass of the carriage without wheels is
M
. Let be
′′
12
,xx the co-ordinates of the point
′′
C
; in this case, the co-ordinates of the points
′
C
and
Dynamics of Non-holonomic Mechanical Systems
465
O
will be
12
cos , sinxl xlθθ
′′
−− and
′
−
1
cosxcθ ,
′
−
2
sinxcθ , respectively,
where
′′′
=
lCC and
′′
=
cOC. We can use thus eight generalized co-ordinates
′′
12
,xx,
,θψ
,
123
,,ϕϕϕ and
4
ϕ .
Fig. 22.15 Motion of a four-wheeled carriage
As in the case of the two-wheeled carriage, we can write the constraint relation (we
notice that the angle
θ
has another significance that in the preceding case)
() ()
′′
+− +=
12
sin cos 0xxθψ θψ
(22.2.85)
for the front wheels. Passing from the co-ordinates of the point
′′
C
to the co-ordinates
of the point
′
C
, one obtains the constraint relation
′′
−+=
12
sin cos 0xxlθθθ
(22.2.85')
for the backwheels. Analogically, equating to zero the velocities of the contact points of
the wheels of centres
1
C
and
2
C
, respectively, we obtain
′′ ′
+++=
′′ ′
+−−=
12 1
12 1
cos sin 0,
cos sin 0;
xxaR
xxaR
θθθϕ
θθθϕ
(22.2.86)
by equating to zero the velocities of the contact points of the wheels of centres
3
C and
4
C , respectively, we can also write
() ()
()
() ()
()
′′ ′′
++ ++ ++ =
′′ ′′
++ +− +− =
12 3
12 4
cos sin 0,
cos sin 0.
xxbR
xxbR
θψ θψ θψ ϕ
θψ θψ θψ ϕ
(22.2.86')
We have obtained six non-holonomic constraint relations, the mechanical system being
thus non-holonomic and scleronomic with two degrees of freedom.
MECHANICAL SYSTEMS, CLASSICAL MODELS
466
The kinetic energy of the axles and of the carriage which is supported by them is of
the form
′′′′′′
=++++
0
1234
TTTTTT, where, by a calculation analogous to that of
the preceding subsection, we have
()
()()
()
()()
′′′ ′′
=+++ − +
⎡⎤
⎣⎦
⎡
′′′ ′
=++−+
⎣
′′ ′′
++++
⎤
⎦
⎡
′′′ ′
=++−+
⎣
′
−
2222 2
0
12 1 2 3
22
22
11 2
22
12 1
22
22
21 2
1
11
2sin cos ,
22
1
sin cos
2
11
2cos sin ,
22
1
sin cos
2
2cos
TMxxc cx x I
Tmxl xl a
ax x J I
Tmxl xl a
ax
θθ θ θ θ
θθ θθ θ
θθ θ θϕ
θθ θθ θ
θθ
()
′′′
+++
⎤
⎦
22
22
11
sin ,
22
xJIθθϕ
{
()
()
() ()
]
}
[
()
{
()
()
() ()
]
}
[
()
′′′′′
=+++
′′ ′′′′
++ ++ + + ++
′′′′′
=+++
′′ ′′′′
−+ ++ + + ++
2
222
312
2
2
12 3
2
222
412
2
2
12 4
1
2
11
2cos sin ,
22
1
2
11
2cos sin ;
22
Tmxxb
bx x J I
Tmxxb
bx x J I
θψ
θψ θψ θψ θψ ϕ
θψ
θψ θψ θψ θψ ϕ
we have denoted by
3
I the moment of inertia of the carriage without wheels with
respect to the
3
Ox
-axis, by
′
I
and
′′
I
the principal moments of inertia of the wheels
1
C and
3
C , respectively, with respect to their axes and by
′
J
and
′′
J
the other
principal moments of inertia of the same wheels. Thus, we obtain
()
()( )
()
()
()()
′′′′ ′′ ′
=+++ ++
′′ ′′ ′ ′′
++ ++ ++ +
⎡⎤
⎣⎦
22 2
12 1 2
2
22222
12 34
1
2sincos
2
1
,
2
TMxx Mcmlx x J
ml J I I
θθ θθ
θψ ϕ ϕ ϕ ϕ
(22.2.87)
where
()
()()
′′′′ ′ ′
=+ + = + + + +
222
3
1
2,
2
MM mmJ McI mla J
(22.2.87')
represent the total mass of the carriage and a quantity of the nature of a moment of
inertia, respectively.
One can thus obtain the eight Lagrange’s equations with multipliers, to which one
associates the six constraint relations; hence, the eight generalized co-ordinates and the
six Lagrange’s multipliers can be determined.
Dynamics of Non-holonomic Mechanical Systems
467
22.2.4 Other Equations of Motion
In the following, we put in evidence other equations of motion, corresponding to the
non-holonomic mechanical system, i.e.: Chaplygin’s equations, Voronets’s equations,
Volterra’s equations and Maggi’s equations; as well, we obtain the canonical form of
the equations of motion (Hamilton’s equations in quasi-co-ordinates) too (Chaplygin,
S.A, 1954).
22.2.4.1 Chaplygin’s Systems. Chaplygin’s Equations
S. A. Chaplygin noticed that, in the case of many non-holonomic conservative
mechanical systems, the generalized co-ordinates
+
12
1
, ,..., , ,...,
s
hh
qq qq q can be
chosen so that the generalized velocities corresponding to the first
h co-ordinates be
considered independent; the other
−sh co-ordinates do not intervene, neither in the
coefficients
+ ,hkj
c of the catastatic constraint relations (22.1.1') (where we make
=
0
0
k
a ), written in the form (the matrix
⎡
⎤
⎣
⎦
kj
a is of rank h )
++
=
==−
∑
,
1
, 1,2,...,
h
j
hk hkj
j
qcqk sh ,
(22.2.88)
nor in the expression of the Lagrangian
L , written without taking into account these
constraint relations (so that
/ 0, 0, 1,2,...,
hk hk
Tq Q k sh
++
∂∂ = = = −); in these
systems, called Chaplygin systems, the equations of motion can be separated from the
non-integrable constraint equations. We preserve the denomination of Chaplygin
systems also for the non-conservative systems with general non-holonomic constraints
(non-catastatic, for which
≠
0
0
k
a ), if the generalized forces and the coefficients
kj
c
do not depend explicitly on the co-ordinates
++12
, ,...,
s
hh
qq q . The motion of the skate,
the motion of a circular disc on a plane and the motion of the two-wheeled carriage,
considered in the previous section, correspond just to such systems.
Obviously, the constraint relations (22.2.88) allow to write the relations
++
=
δ= δ= −
∑
,
1
, 1,2,...,
h
j
hk hkj
j
qcqk sh
,
(22.2.88')
for the virtual generalized displacements, the virtual generalized displacements
δδ δ
12
, ,...,
h
qq q being independent too.
Starting from the d’Alembert-Lagrange theorem (18.2.27'), written in the form
11
dd
0,
dd
hsh
jj
kh hk
jj
hk hk
jk
TT T T
Qq Q q
tq q tq q
−
++
++
==
∂∂ ∂ ∂
⎡⎛ ⎞ ⎤
⎡⎛ ⎞ ⎤
−−δ+ − − δ=
⎜⎟
⎜⎟
⎢⎥
⎢⎥
∂∂ ∂ ∂
⎣⎝ ⎠ ⎦
⎣⎝ ⎠ ⎦
∑∑
using the relations (22.2.88') and observing that in a double sum one can invert the
order of summation, we obtain
−
+
+
==
∂∂ ∂
⎡⎛ ⎞ ⎤
⎛⎞
−−+ δ=
⎜⎟
⎜⎟
⎢⎥
∂∂ ∂
⎝⎠
⎣⎝ ⎠ ⎦
∑∑
,
11
dd
0
dd
hsh
jj
hkj
jj
hk
jk
TT T
Qc q
tq q tq
;
MECHANICAL SYSTEMS, CLASSICAL MODELS
468
but the virtual generalized displacements which intervene are independent so that one
can write
−
+
+
=
∂∂ ∂
⎛⎞
⎛⎞
−+ = =
⎜⎟
⎜⎟
∂∂ ∂
⎝⎠
⎝⎠
∑
,
1
dd
, 1,2,...,
dd
sh
j
hkj
jj
hk
k
TT T
cQjh
tq q tq
.
(22.2.89)
We denote by an asterisk an expression in which the generalized velocities
++12
, ,...,
s
hh
qq q
, hence the generalized velocities which are considered as dependent,
have been eliminated by means of the constraint relations (22.2.88). We can thus write
−
+
+
=
−
+
+
==
∂∂ ∂
=+
∂∂ ∂
∂
∂∂ ∂
=+
∂∂ ∂ ∂
∑
∑∑
*
,
1
*
,
11
,
,
sh
hkj
jj
hk
k
sh h
hkl
jj j
hk
kl
TT T
c
qq q
c
TT T
qq q q
where we took into account
+
++
+
=
∂
∂∂
==
∂∂∂
∑
,
,
1
,
h
hkj
hk hk
hkj l
jj
l
l
c
qq
cq
qqq
;
observing that
+
+
=
∂
=
∂
∑
,
,
1
d
d
h
hkj
hkj l
k
l
c
cq
tq
,
we can also write
*
,
,
111
dd d
.
dd d
sh sh h
hkl
hkj l
jj
hk hk l
kkl
c
TT TT
cq
tq tq tq q q
−−
+
+
++
===
∂
⎛⎞
∂∂ ∂∂
⎛⎞
=+ +
⎜⎟
⎜⎟
∂∂ ∂∂∂
⎝⎠
⎝⎠
∑∑∑
The equations (22.2.89) can be rewritten in the form
**
,,
11
d
, 1,2,..., ,
d
sh h
hkl hkj
j
l
jj j
hk l
kl
cc
TT T
qQj h
tq q q q q
−
++
+
==
∂∂
⎛⎞∂∂ ∂
⎛⎞
−+ − = =
⎜⎟
⎜⎟
∂∂ ∂ ∂ ∂
⎝⎠
⎝⎠
∑∑
(22.2.89')
obtaining thus Chaplygin’s equations presented in 1895 at a conference and published
in 1897. Eliminating the generalized velocities
++12
, ,...,
s
hh
qq q from the expressions
+
∂∂/
hk
Tq by means of the constraint relations (22.2.88), the system (22.2.89')
becomes of
h differential equations and with h unknown functions
12
( ), ( ),..., ( )
h
qtqt qt, a number equal to the number of degrees of freedom of the
mechanical system. These unknown functions are thus determined independently of the
Dynamics of Non-holonomic Mechanical Systems
469
dependent generalized co-ordinates
++12
( ), ( ),..., ( )
s
hh
qtqt qt, which can be
subsequently obtained, by
s quadratures, from the constraint relations (22.2.88).
If the constraint relations are integrable (holonomic), hence if
++
∂∂
===−
∂∂
,,
, , 1,2,..., , 1,2,...,
hkl hkj
j
l
cc
jl h k s h
qq
,
(22.2.90)
then Chaplygin’s equations are reduced to Lagrange’s classical equations.
Putting in evidence the conservative part
∂∂/
j
Uqand the non-conservative part
j
Q
of the generalized forces (see formula (18.2.24)), one can introduce the kinetic potential
=+TUL , so that Chaplygin’s equations read
*
**
,,
11
d
, 1,2,..., .
d
sh h
hkl hkj
j
l
jj j
hk l
kl
cc
qQj h
tq q q q q
−
++
+
==
∂∂
⎛⎞∂∂ ∂
⎛⎞
⎛⎞
−+ − = =
⎜⎟
⎜⎟
⎜⎟
∂∂ ∂ ∂ ∂
⎝⎠
⎝⎠
⎝⎠
∑∑
LL L
(22.2.89'')
Let us write now the equations of motion of the skate (see Sect. 22.2.3.1). We
choose as independent generalized co-ordinates the co-ordinates
=
11
qx and
=
3
q θ
,
the dependent co-ordinate
=
22
qx being specified by the constraint relation
=
21
tanxx θ .
Observing that
21 23
tan , 0ccθ==, we can write the equations (22.2.89'') ]n the
form (only the derivative
∂∂=
2
21
/1/cosc θθ is non-zero)
()
⎛⎞
∂∂∂
⎛⎞
⎛⎞
−+ − =
⎜⎟
⎜⎟
⎜⎟
∂∂∂
⎝⎠
⎝⎠
⎝⎠
⎛⎞
∂∂∂
⎛⎞
−+ =
⎜⎟
⎜⎟
∂∂
∂
⎝⎠
⎝⎠
*
**
2
112
*
**
1
2
2
d
0,
d
cos
d
0.
d
cos
tx x x
x
tx
θ
θ
θ
θ
θ
LLL
LLL
In this case, the kinetic potential is given by (we use the formula (22.2.37))
()
=+
2
1
*2
11
2cos 2
x
MIθ
θ
L
and one obtains
11
tan 0, 0xxθθ θ+==
,
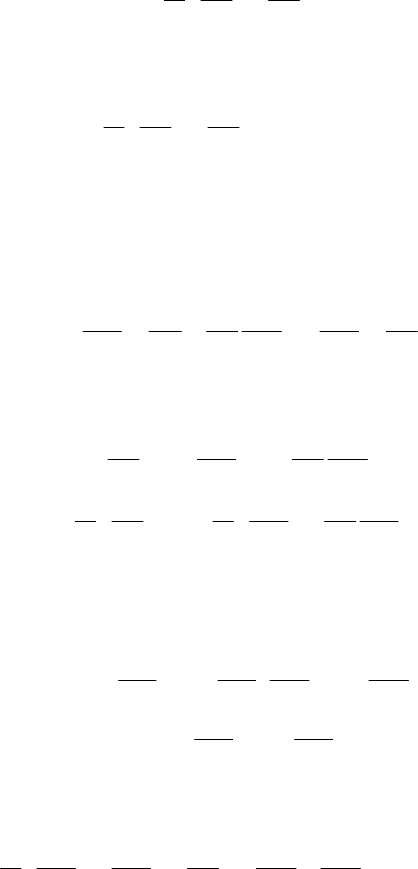
being led to the same results as in Sect. 22.2.3.1.
We can consider also a somewhat more general case in which the skate, of weight
gM
, slides on the plane
12
Ox x
, inclined with the angle α with respect to the
horizontal line (Fig. 22.16). Chaplygin’s equations are the same, Lagrange’s function
being given by
MECHANICAL SYSTEMS, CLASSICAL MODELS
470
=++
2
1
*2
1
2
11
sin
22
cos
x
MImgx
θα
θ
L
;
besides the equation
= 0θ
, we find
+=
2
11
tan sin cosxx gθθ α θ
.
Assuming that
=v
0
0 , we get
()
==
=−
22 2
0
1
2
0
2
00
2
( ) sin , sin ,
2
1
() 2 sin2 ;
2
g
xt a ta
xt a t t
ωα
ω
ωω
(22.2.91)
hence, the skate
AB has a uniform motion of rotation about the contact point C ,
which – in its displacement – describes a cycloid.
Fig. 22.16 Motion of a skate on an inclined plane
We can associate to the independent generalized co-ordinates
12
, ,...,
h
qq q other
independent parameters, that is quasi-co-ordinates
12
, ,...,
h
ππ π, by means of the
relations (the Greek indices are summed from
1toh , according to the summation
convention of the dummy indices)
= q
γγεε
πα,
(22.2.92)
of the form (22.2.17), where
12
( , ,..., ), , 1,2,...,
h
qq q h
γε γε
αα γε==.
Using these relations and the
−shconstraint relations (22.2.88), we can express all
the generalized velocities by means of the
h quasi-velocities in the form
==, 1,2...,
jj
qjs
σ
σ
βπ .
(22.2.92')
To the virtual generalized displacements correspond relations of the form
δ= =, 1,2...,
jj
qjs
σ
σ
βπ ,
(22.2.92'')
Dynamics of Non-holonomic Mechanical Systems
471
where
δ
σ
π are the virtual variations of the quasi-co-ordinates. Taking into account
these relations, the d’Alembert–Lagrange theorem
∂∂
⎡⎛ ⎞ ⎤
−δ=
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
d
0
d
j
jj
q
tq q
LL
leads to
∂∂
⎡⎛ ⎞ ⎤
−==
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
d
0, 1,2,...,
d
j
jj
h
tq q
σ
βσ
LL
,
where the Latin indices are summation indices from
1 to s , corresponding to
Einstein’s convention of summation, while
=
12 12
( , ,..., , , ,..., )
s
h
qq qqq q LL is
Lagrange’s kinetic potential.
Taking into account (22.2.92''), we get
∂
∂∂∂ ∂∂
=+ =
∂∂∂∂ ∂∂
**
,
j
j
jj
qqqq q
σ
σ
σ
γγ γ σ
β
πβ
π
LLL LL
,
wherefrom
∂
∂∂ ∂
=−
∂∂∂∂
∂
⎛⎞∂∂∂
⎛⎞
=−
⎜⎟
⎜⎟
∂∂∂∂
⎝⎠
⎝⎠
*
*
,
dd
,
dd
j
j
jj
j
j
jj
qqqq
tq t qq
σ
γε γε σ
ε
γγ
ε
γσ σ
ε
εγ
β
ββ βπ
β
ββπ
π
LL L
LLL
with
==1,2,..., , , , 1,2,...,js hγεσ . We notice ∂∂ =∂∂(/) (/)
jj j
q
γε σ σ σ
εε
ββπβππ,
to which we associate two other analogous relations; we can thus write
∂∂∂∂
==
∂∂∂∂
∂∂
=
∂∂
**
,,
.
jjjj
qq
q
εεσσ
γσ γε
γσγε
γσ
γσ
ββββ
ββ
ππ
β
π
LL
Replacing in the equations of motion, it results
∂
∂
⎛⎞∂∂∂
⎛⎞
⎛⎞
−+ − =
⎜⎟
⎜⎟⎜ ⎟
∂∂∂∂∂
⎝⎠
⎝⎠
⎝⎠
*
**
d
0
d
j
j
j
tq
γ
σ
σ
γγ γσ
β
β
π
ππ ππ
LLL
,
(22.2.93)
with
1,2,..., , , 1,2,...,
j
shγσ==
; we obtain thus Chaplygin’s equations in
quasi-co-ordinates. If the quasi-co-ordinates are true co-ordinates
, , 1,2,...,h
γε γε
βγε=δ =
(we introduce Kronecker’s symbol), so that the equations