Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
492
introducing the virtual generalized displacements, the relations (22.4.2) take the form
(22.2.88').
Supposing that at least a percussive generalized force intervenes, the generalized
velocities
′
j
q at the initial moment
′
t
become
′′
j
q at the final moment
′′
t
.
The d’Alembert–Lagrange theorem becomes
=
⎡⎛ ⎞ ⎤∂∂
−−−δ=
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
∑
**
1
d
0
d
h
jj
jj
j
TT
QR q
tq q
,
(22.4.3)
where
*
T
is the kinetic energy, which is written taking into account the constraint
relations (22.4.2) (eventually, the quasi-velocities);
j
Q and , 1,2,...,
j
Rj h= , are the
given and the constraint (which appear only in the non-holonomic case) generalized
forces, respectively. By introducing the constraint generalized forces, the constraint
relations (22.2.88') have been eliminated, so that, in (22.4.3), the virtual generalized
displacements are independent; we are thus led to the system of
h differential
equations
⎛⎞
∂∂
−=+ =
⎜⎟
∂∂
⎝⎠
**
d
, 1,2,...,
d
jj
jj
TT
QRj h
tq q
,
(22.4.3')
which describe the motion of the non-holonomic system (the motion of the
representative point
P in the space
s
Λ ), at any moment t (including the moments
′′′
∈ [, ]ttt
). Integrating on the collision interval, we can write
()
′′
′′ ′′
′′
′
∂∂
−=+=
∂∂
∫∫
**
d d , 1,2,...,
t
tt
jj
tt
jj
t
TT
tQRtj h
qq
.
A mean value theorem applied to an integral the integrand of which is a finite quantity
allows to neglect the integrals which result from the non-percussive part of the given
generalized forces and from the constraint generalized forces (which are, as well, finite,
as it has been shown by Beghin and Rousseau in 1903 for a non-holonomic mechanical
system with ideal constraints), as well as from the partial derivatives
*
/ , 1,2,...,
j
Tqj h∂∂ = .
Defining the generalized percussion in the form (see Sect. 18.3.1.8 too)
′′
′
′′ ′
−→+
==
∫
00
lim d , 1,2,..,
t
jj
t
tt
Qtj hP ,
(22.4.4)
we get, finally,
′′ ′
⎛⎞⎛⎞⎛⎞
∂∂ ∂
Δ= − ==
⎜⎟⎜⎟⎜⎟
∂∂ ∂
⎝⎠⎝⎠⎝⎠
** *
,1,2,...,
j
jj j
TT T
j
h
qq q
P .
(22.4.5)
Dynamics of Non-holonomic Mechanical Systems
493
Hence, in the collision phenomenon, the equations (22.4.5) of the non-holonomic
mechanical systems have the same form as those used for the holonomic
ones (see
Sect. 18.3.1.8); as a difference, in case of the non-holonomic mechanical systems, the
system is reduced with
−sh
constraint relations, while
*
T
contains only independent
parameters, the functions being expressed by means of the relations (22.4.2).
Writing the constraint relations (22.4.2) for the ends of the collision interval, we
obtain, by subtraction (the kinematic coefficients are constants),
++
=
Δ= Δ= −
∑
,
1
,1,2,...,
h
j
hk hkj
j
qcqk sh ,
(22.4.6)
′′ ′
Δ= − =,1,2,...,
jj
qqqj h .
(22.4.6')
The generalized velocities at the start of the collision phenomenon
, 1,2,...,
i
qi s
′
= ,
and the generalized percussions
, 1,2,...,
j
j
h=P
, are known; the unknown
generalized velocities
, 1,2,...,
j
qj h
′′
=
, at the end of the collision phenomenon, will
be given by the relations (22.4.5), while the other generalized velocities
, 1,2,...,
hk
qk sh
+
′′
=−
, will be given by the relations (22.4.6), (22.4.6').
The collision phenomenon considered above corresponds to the intervention of some
percussive forces. We consider now the case of a sudden application of some
non-holonomic constraints.
Let thus be a mechanical system subjected to no one percussive force, which after
eliminating the holonomic constraints, has
s degrees of freedom and is represented in
the space
s
Λ by the representative point P , specified by the generalized co-ordinates
12
, ,...,
s
qq q. If, at the moment
′
t
, we introduce −sh ideal non-holonomic relations of
the form (22.4.2), then the virtual generalized displacements will be linked by the
relations (22.2.88'), so that
h of them can be considered to be independent. Taking into
account these relations, the d’Alembert–Lagrange theorem (22.4.3) reads
{
−
+
+
==
−
+
+++
++
=
⎛⎞
∂∂∂
+−−−
⎜⎟
∂∂∂
⎝⎠
⎡⎛⎞⎤⎫
∂∂
−+++δ=
⎬
⎜⎟
⎢⎥
∂∂
⎣⎝⎠⎦⎭
∑∑
∑
***
,
11
**
,
,
1
d
d
d
0;
d
hsh
jj
hkj
jj
hk
jk
sh
hkj
j
hkj hk hk
hk hk
k
TTT
cQR
tq q q
c
TT
cQRq
tq q
(22.4.7)
integrating with respect to time on the collision interval
′′′
[, ]tt
and making the same
considerations as above (given generalized forces and finite constraints, finite partial
derivatives
*
/ , 1,2,...,
i
Tqi s∂∂ = , constant kinematic coefficients, independent
generalized displacements), we obtain the system of algebraic equations
−
+
+
=
⎛⎞ ⎛ ⎞∂∂
Δ+Δ ==
⎜⎟ ⎜ ⎟
∂∂
⎝⎠ ⎝ ⎠
∑
**
1
0, 1,2,...,
sh
hk
j
hk
k
TT
cjh
qq
,
(22.4.8)

MECHANICAL SYSTEMS, CLASSICAL MODELS
494
′′ ′
⎛⎞⎛⎞⎛⎞
∂∂ ∂
Δ= − =
⎜⎟⎜⎟⎜⎟
∂∂ ∂
⎝⎠⎝⎠⎝⎠
** *
,1,2,...,
jj j
TT T
j
h
qq q
,
(22.4.8')
for the determination of the
s generalized velocities after collision.
Let us denote by
*
T
the function
*
T
considered as depending explicitly on the
generalized velocities
12
, ,...,
h
qq q
and implicitly on them by the generalized velocities
++12
, ,...,
s
hh
qq q
, by means of the constraint relations (22.4.2); in this case, the
equations (22.4.8), (22.4.8') can be written, formally, in a compact form
′′ ′
⎛⎞⎛⎞⎛⎞
∂∂ ∂
Δ= − ==
⎜⎟⎜⎟⎜⎟
∂∂ ∂
⎝⎠⎝⎠⎝⎠
** *
0, 1,2,...,
jj j
TT T
j
h
qq q
.
(22.4.9)
One must give a special attention to these equations, because one cannot eliminate
the generalized velocities
++12
, ,...,
s
hh
qq q , effecting then the differentiation with
respect to the other generalized velocities; indeed, the constraints (22.4.2) take not place
for
′
<tt
, so that these ones cannot be used to eliminate the generalized velocities
mentioned above from the expression
′
∂∂ =
*
( / ) , 1,2,...,
j
Tqj h
. In what concerns
the elimination of these generalized velocities from the expressions
′′
∂∂
*
(/)
j
Tq
,
=
1,2,...,
j
h
, corresponding to the end of the collision phenomenon, there can arise
two situations: the non-holonomic constraints suddenly applied (i) continue to act or
(ii) disappear for
′′
>tt
. The case (i) corresponds to a plastic collision, for which
= 0k , while the case (ii) corresponds to a perfect elastic collision, for which = 1k ; k
is the restitution coefficient (see Sect. 10.1.1.1). In general, we can have
<<01k .
Obviously, the generalized velocities at the beginning of the collision phenomenon
12
, ,...,
s
qq q are known; to determine the generalized velocities which result at the end of
the phenomenon of collision we proceed in a different way, as
= 0k or <<01k . So, in
the first case, the constraints (22.4.2) are maintained for
′′
>tt
too and we can eliminate
the generalized velocities from
*
(/), 1,2,...,
j
Tq j h
′′
∂∂ =
, the problem being thus
completely solved. In the second case, one cannot make the elimination mentioned above,
having to our disposal
h algebraic equations
′′ ′′ ′′
12
,,...,
h
qq q ; the other generalized
velocities
++
′′ ′′ ′′
12
, ,...,
s
hh
qq q will be specified by the relations (22.4.2), the problem
being thus completely solved. In the second case, one cannot make the elimination
mentioned above, having to our disposal h equations (22.4.9) for s unknowns
′′ ′′ ′′
12
, ,...,
s
qq q ; it is necessary to associate other −sh relations of physical nature,
obtained – eventually – on an experimental way, to can solve the problem.
The problem becomes more complicated if, beside the non-holonomic constraints –
which can be also non-ideal – appear percussive forces too. In the case
= 0k we have
s unknown percussions and −− =()ssh h generalized velocities at the end of the
collision phenomenon, as well unknown; hence, there are
+sh unknowns to be
determined. For this, we have at our disposal
h equations of dynamical equilibrium
Dynamics of Non-holonomic Mechanical Systems
495
(22.4.5) and
−sh constraint relations (22.4.2); we need other h relations, which can be
obtained assuming that the constraints are ideal (
−− =()ssh h relations) or imposing
other supplementary conditions of physical nature. In the case
<≤01k we have also
+− =()hsh s equations at our disposal; but the number of the unknowns is 2s
(
s percussions and s generalized velocities at the end of the collision). The condition of
ideal constraints involves only
h relations, so that there are still necessary −sh relations
of physical nature to solve the problem.
The above results are valid for discrete mechanical systems (systems of particles or
systems of rigid solids).
22.4.1.2 Applications
We consider, in what follows, some simple applications, which present a certain interest
in themselves.
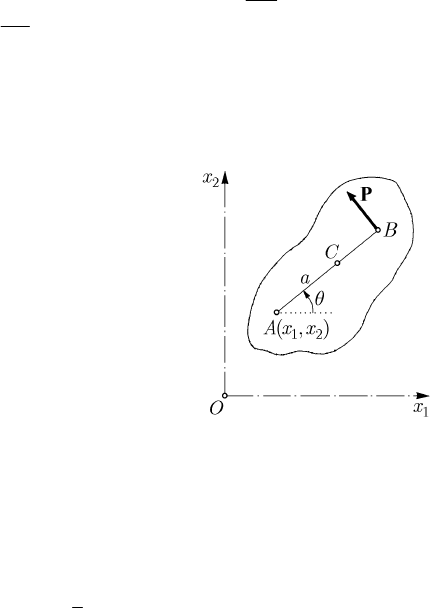
Let be thus a rigid solid which slides on a horizontal plane and is acted upon by a
percussive force contained in the plane and normal to the direction of advance. We idealize
the rigid solid by a skate of mass
M which slides on the plane
12
, Ox x A being the
contact point,
C
the mass centre ( =AC a ), the percussion force
P
acting at the point
B (
=AB b
) (Fig. 22.18); the position of the skate will be specified by the point
12
(, )Ax x and by the angle θ made with the
1
Ox -axis. As we have seen in Sects. 3.2.2.6
and in 22.2.3.1, the constraint relation is of the form
=
21
tanxx θ .
(22.4.10)
Fig. 22.18 Motion of a skate on a horizontal plane, acted upon by a percussive force
The co-ordinates of the mass centre are given by
=+
1
1
cos
C
xxaθ ,
=+
2
2
sin
C
xxaθ ; in this case, corresponding to the formula (22.2.37), we can
express the kinetic energy in the form
()( )
⎡⎤
=−++ +
⎣⎦
22
22
12
1
sin cos
2
TMxa xa i
θθ θθ θ
,
(22.4.11)
where
i is the gyration radius with respect to the mass centre. Taking into account the
constraint relation (22.4.10), it results
MECHANICAL SYSTEMS, CLASSICAL MODELS
496
()
⎡
⎤
=++
⎢
⎥
⎣
⎦
2
1
*222
2
1
2
cos
x
TM ai
θ
θ
.
(22.4.11')
The work effected by the percussion
P
is given by
δ=− δ+ δ+δ=δ
12
sin cosWP xP xPb Pbθθθθ,
so that the generalized percussions will be
1
0, Pb
θ
== =PP P . Assuming that the
skate is at rest at the beginning of the collision phenomenon, the equations (22.2.5) with
(22.4.11') lead to
()
22
12
0, xx Mai Pbθ
′′ ′′ ′′
== + =
.
(22.4.12)
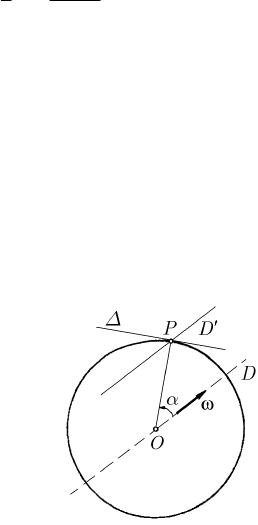
Fig. 22.19 Motion of a homogeneous circular disc, which
is rotating about one of its diameters
Let us consider now a homogeneous circular disc of mass
M and radius a , which is
rotating with an angular velocity
ω about a diameter
D
of it. At a certain moment, the
point
P of the circumference, specified by the angle α and the distance sina α with
respect to the axis
D
(Fig. 22.19), is suddenly stopped; the velocity of this point at the
respective moment is
sinaωα, while the moment of momentum with respect to the
axis
′
D
which passes through P and is parallel to D is given by
′
=
2
(1/ 4)
D
KMaω (the moment of inertia with respect to the axis D is
=
2
(1/ 4)
D
IMa), remaining unchanged after stopping the point
P
. In this case, the
moment of momentum with respect to the axis
Δ , tangent at P to the circumference is
=
2
(1/ 4) sinKMa
Δ
ωα. Starting from the moment of inertia
D
I
and applying the
Huygens–Steiner theorem (see Sect. 3.1.2.6), we obtain the axial moment of inertia
=
2
(5/4)IMa
Δ
and then the angular velocity =/(1/5)sinKI
ΔΔ
ωα, hence a
velocity which is the fifth part of the initial velocity of the point
P .
Let be, as well, a homogeneous sphere of radius
a , which moves freely in the space
and which, at the initial moment
′
t
strikes a rough horizontal plane
′′′
12
Oxx (the
′′
3
Ox -axis is directed towards the part from which comes the sphere, the considered
frame of reference being fixed). After collision, the sphere remains on the plane and can
Dynamics of Non-holonomic Mechanical Systems
497
have a motion of pivoting or of rolling without sliding; there are thus imposed the
constraint relations (see Sect. 22.2.3.3, formula (22.2.57'))
12 21 3
0, 0, 0xa xa xωω
′′ ′′ ′
−= −= =
,
(22.4.13)
according to which the velocity of the contact point vanishes. Introducing Euler’s
angles
,,ψθϕ
and using the relations (5.2.35') which are linking the components of the
rotation velocity vector
ω
along the axes of the fixed frame of reference to these
angles, we can write three constraint relations in the form (see the formulae (22.2.57'')
too)
()
()
′
=−
′
=− −
′
=
1
2
3
sin sin cos ,
cos sin sin ,
0,
xa
xa
x
θψϕθψ
θψϕθψ
(22.4.13')
the first two relations being non-holonomic. The kinetic energy is given by
()
′′′ ′′′
=+++++
⎡⎤
⎣⎦
22222 2 2
123 123
1
2
TMxxxi
ωωω ,
(22.4.14)
where
i is the gyration radius with respect to a diameter; taking into account the
relations (5.2.35'), it results
()
=++++++
⎡⎤
⎣⎦
2222222
123
1
2cos
2
TMxxxiψθϕ ψϕθ
.
(22.4.14')
By means of the relations (22.4.13'), we can write
()
()
()
*
12
2
12
*
12
2
12
12
*
12
12
2
1
cos ,
sin cos ,
cos sin c
xx
TTT T
Mi
xx
xx
TTT T
Mi ax x
xx
xx
TTT T
xx
Mi a x
ψϕ θ
ψψ ψ ψ
θψψ
θθ θ θ
ϕϕ ϕ ϕ
ϕψ θ θ
′′
∂∂
∂∂∂ ∂
=+ + = +
′′
∂∂
∂∂ ∂ ∂
′′
∂∂
∂∂∂ ∂
′′
=+ + = + −
⎡
⎤
⎣
⎦
′′
∂∂
∂∂ ∂ ∂
′′
∂∂
∂∂∂ ∂
=+ +
′′
∂∂∂∂∂∂
′
=+−
()
2
os sin ;xψψ
′
+
⎡⎤
⎣⎦
in this case, the equations (22.4.8') read
()
() ()
()
()
() ()
′′ ′′ ′ ′
+=+
⎡ ′′⎤
′′ ′ ′ ′
+=+ −
⎣⎦
′′ ′′
++
⎡ ′′⎤
′′ ′ ′
=+ − −
⎣⎦
22 2
12
222 2
2
12
cos cos ,
sin cos ,
sin cos
cos cos sin sin ,
ia i ax x
ia i
iaxx
ψϕ θψϕ θ
θθ ψ ψ
θϕ ψ θ
ϕψ θ ψ ψ θ
MECHANICAL SYSTEMS, CLASSICAL MODELS
498
where we took into account the constraint relations (22.4.13') which take place at the
end of the collision phenomenon and remain still valid. Hence, one obtains
()
()
{
()}
()
()
()
()
′′ ′ ′
=++
⎡⎤
⎣⎦
+
′′
++
′′ ′ ′ ′
=+−
⎡⎤
⎣⎦
+
′′ ′ ′ ′
=−+
⎡
⎤
⎣
⎦
+
22 22
22
12
2
12
22
2
12
22
1
cos sin
sin
cos sin cos ,
1
sin cos ,
1
sin cos sin ;
sin
ia a
ia
ax x
iax x
ia
iaxx
ia
ψψϕθθ
θ
ψψθ
θθψψ
ϕϕθψψ
θ
(22.4.15)
taking into account (22.4.13') and (5.2.35'), we obtain the velocities of the centre of the
sphere, after collision, in the form
()
()
′′ ′ ′
=+
+
′′ ′ ′
=+
+
′′
=
2
21
1
22
2
21
2
22
3
,
,
0.
C
C
C
a
xiax
ia
a
xixa
ia
x
ω
ω
(22.4.16)
22.4.2 First Integrals of the Equations of Motion
We consider, in what follows, the forms taken by the first integrals of the systems of
equations of motion in case of non-holonomic constraints, as well as the possibility to
obtain them; some applications put in evidence the results thus obtained.
22.4.2.1 Determination of First Integrals
Starting from Lagrange’s equations for a holonomic mechanical system, we find, in
certain conditions, the first integral of Painlevé (18.2.61), the first integral of Jacobi
(18.2.63) or a first integral of Jacobi type (18.2.66), the last two ones being particular
cases of Painlevé’s first integral (see Sect. 18.2.3.4); the mechanical systems which
admit one of the two integrals are generalized conservative systems, for which the
generalized mechanical energy (18.2.68) is introduced. Jacobi’s first integral allows the
reduction of Lagrange’s system of equations (18.2.38) for a natural mechanical system,
to a system of equations corresponding to a mechanical system with a number of
degrees of freedom less with a unity (see Sect. 18.2.3.5). The existence of hidden
co-ordinates (the kinetic energy
T does not depend explicitly on these co-ordinates) or
of ignorable co-ordinates (Lagrange’s function
L does not depend explicitly on these
co-ordinates) allows, as well, the determination of first integrals; in this case,
corresponding to the Routh–Helmholtz theorem, the problem is reduced to the
integration of a system of equation of Lagrange for a mechanical system with a smaller
number of degrees of freedom (see Sects. 18.2.3.6 and 18.2.3.7).
In the case of a non-holonomic mechanical system for which one of the generalized
co-ordinates, let be
k
q , is ignorable ( ∂∂=/0
k
qL ) one can write a first integral
starting from Lagrange’s equations only if some conditions are fulfilled. We introduce
thus Chaplygin’s equations (22.2.89''), in which we assume that the non-conservative
Dynamics of Non-holonomic Mechanical Systems
499
forces
, 1,2,...,
j
Qj h= , vanish, the constraint relations being of the form (22.2.88).
These equations take the form of Lagrange’s equations for
=
1
j
if the relations
++
∂∂
==−=
∂∂
,,1
1
, 1,2,..., , 1,2,...,
hkl hk
l
cc
kshlh
qq
,
(22.4.17)
are verified. Introducing the function
++
=
12
( , ,..., )
s
hk hk
uuqqq by the relations
++
==−
∫
1
10
1
,1
d , 1,2,...,
q
hk hk
q
ucqksh
,
(22.4.18)
where
10
q is an arbitrary constant, and using the relations (22.4.17), we can write
++
+
∂∂
∂
==
∂∂ ∂
∫∫
11
10 10
,1 ,
11
1
dd
qq
hk hkl
hk
qq
ll
cc
u
qq
qq q
,
which leads to
()
+
++
∂
=+
∂
10 2
,,
, ,...,
hk
s
hkl hkl
l
u
ccqqq
q
;
replacing in (22.2.88), we obtain, finally,
()
++ +
=
=+
∑ 10 2
,
2
d d , ,..., d
h
s
j
hk hk hkj
j
qu cqqqq.
(22.4.19)
Hence, in case of a non-holonomic mechanical system, we can write an equation of
motion corresponding to a certain generalized co-ordinate, in the form of an equation of
Lagrange type, if, in the non-holonomic constraint relations, it is possible to separate a
total differential, so that in the other constraint relations does no more appear the
respective generalized co-ordinate.
Let us consider now the system of equations of motion in quasi-co-ordinates (22.2.35),
with the notations (22.2.35'), written in the hypothesis in which the constraint relation are
catastatic, of the form (22.2.31); assuming that the generalized forces
*
, 1,2,...,
j
Qj s= ,
are conservative, we can introduce the kinetic potential
=+
*
TUL , and the equations of
motion take the form
−
=
⎛⎞
∂∂ ∂
−+ == −
⎜⎟
∂∂ ∂
⎝⎠
∑
** *
1
d
0, 1,2,...,
d
sm
i
kj k
jj j
k
jsm
t
γπ
ππ π
LL L
,
(22.4.20)
where
*
L
is a function of the generalized co-ordinates
12
, ,...,
s
qq q and, in general, of the
generalized quasi-velocities
12
, ,...,
s
ππ π
. If the condition
−
=
∂
∂
∂
⎛⎞
−=
⎜⎟
∂∂∂
⎝⎠
∑
*
1
1
0
sm
il im
mk l k
m
j
l
k
qq
α
α
ββ π
π
L
(22.4.21)

MECHANICAL SYSTEMS, CLASSICAL MODELS
500
is fulfilled, then the equation (22.4.20), corresponding to the quasi-co-ordinate
1
π takes the
form of an equation of Lagrange; this condition is fulfilled if, e.g.,
1
0, 1,2,..., , 1,2,...,
i
k
isksmγ == = −. If, moreover, the quasi-co-ordinate
1
π is
ignorable (which takes place, e.g., if the kinetic energy
*
T does not depend explicitly on
any generalized co-ordinate), then one obtain a finite integral of the form
∂
=
∂
*
1
const
π
L
.
(22.4.22)
Let us return to the equations (22.2.35), (22.2.35'), where
*
T is a function of the
generalized co-ordinates
12
, ,...,
s
qq q and, in general, on the generalized velocities
12
, ,...,
s
ππ π ; we notice that, due to non-holonomic constraints, we can equate to zero
the generalized quasi-velocities
0, 1,2,...,
smk
kmπ
−+
== , in the expressions
*
/ , 1,2,...,
i
Ti sπ∂∂ = , but only after effecting the differentiation. Multiplying each
member of the equation (22.2.35) by
j
π and summing, it results
−−
==
⎡⎛⎞ ⎤
∂∂
−=
⎜⎟
⎢⎥
∂∂
⎣⎝⎠ ⎦
∑∑
**
*
11
d
d
sm sm
j
jjj
jj
jj
Q
t
ππ π
ππ
LL
,
where we took into account that
−−
==
==
∑∑
11
0, 1,2,...,
smsm
i
j
kj k
kj
isγππ ,
according to the relations (22.2.35) and to the fact that one can equate to zero the
generalized quasi-velocities
0, 1,2,...,
smk
kmπ
−+
== .
We notice that
−
=
⎛⎞
∂∂
=+
⎜⎟
∂∂
⎝⎠
∑
***
1
d
d
sm
jj
jj
j
TTT
t
ππ
ππ
,
because
*
T does not depend explicitly on time, having catastatic constraints. In general,
=++
****
0
21
TTTT,
(22.4.23)
where
*
2
T
is a quadratic form in the generalized quasi-velocities , 1,2,...,
j
jsmπ =− ,
*
1
T
is a linear form in the same generalized quasi-velocities, while
*
0
T
does not depend
on these generalized quasi-velocities; as well, Euler’s theorem for homogeneous
functions leads to
−
=
∂
=+
∂
∑
*
**
21
1
2
sm
j
j
j
T
TTπ
π
.

Dynamics of Non-holonomic Mechanical Systems
501
Finally, we can write
()
−
=
⎡⎤
+− ++ =
⎣⎦
∑
** *** *
0
21 21
1
d
2
d
sm
j
j
j
TT TTT Q
t
π ,
so that
()
−
=
−=
∑
** *
0
2
1
dd
sm
j
j
j
TT Qπ .
(22.4.24)
Assuming that the generalized forces
*
, 1,2,...,
j
Qj sm=−, derive from a simple
potential
U or from a generalized potential with the scalar part
0
U , we introduce the
potential energy
=−VU or =−
0
VU, respectively, so that
∂
=− = −
∂
*
, 1,2,...,
j
j
V
Qjsm
π
.
(22.4.25)
In this case, the relation (22.4.24) becomes
()
−+=
**
0
2
d0TTV
(22.4.24')
and we obtain the first integral of the generalized mechanical energy
=−+=
**
0
2
* TTVhE ,
(22.4.26)
where
E is the generalized mechanical energy, analogue to the first integral (18.2.68)
obtained in case of holonomic mechanical systems. If
=
*
0
0T , the kinetic energy
*
T
being, e.g., a quadratic form in the generalized quasi-velocities
−
12
, ,...,
sm
ππ π
, then the
first integral (22.4.26) is reduced to the first integral of the mechanical energy
=+=
*
*ETVh
.
(22.4.27)
22.4.2.2 Applications
Let be a circular disc, of radius R and mass M , which rolls without sliding on the fixed
horizontal plane
′′′
12
Oxx ; the
′′
3
Ox -axis is directed towards the part in which is the disc. A
movable system of axes has the pole at the centre
O of the disc, the
3
Ox -axis being normal
to its plane and the
1
Ox -axis being horizontal; the tangent to the disc at the contact point I
makes the angle
ψ with the
′′
1
Ox -axis, the axes
′′
3
Ox and
2
Ox make the angle θ , while
the angle
ϕ specifies the rotation of the disc (Fig. 22.20). The conditions at the contact
point are
12
dcosd, dsindxR xRψϕ ψϕ
′′
==.
(22.4.28)