Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
512
d( , )PC ε<
(23.1.9')
for any
0
tt> , the point P corresponding to the solution being an arbitrary point of
the trajectory of the perturbed motion, then we say that the trajectory
C is orbitally
stable (or stable in Poincaré’s sense).
If the trajectory
C
is orbitally stable and if there exists
0δ >
, so that the condition
(23.1.9) holds and the condition
lim d( , ) 0
t
PC
→∞
=
(23.1.9'')
be also involved, then we say that the trajectory
C is asymptotically orbitally stable;
hence, a perturbed curve tends to the curve
C in an infinite time.
23.1.1.2 Functions of a Definite Sign
We begin with some considerations concerning the functions of a definite sign,
which intervene in the study of stability problems.
Let be a uniform and continuous function
12
( , ,..., )
n
FFxx x= , defined in a
neighbourhood of the origin, so that
(0, 0,...,0) 0F = ; the co-ordinates
, 1,2,...,
ii
xqi ns== =, can be the co-ordinates of a representative point P in the
configuration space
s
Λ . We say that the function F is positive definite (negative
definite) if, for
22 2
12
...
n
xx x h+++<, it takes only positive (negative) values and
vanishes only at the origin; if, without changing the sign, the function
12
( , ,..., )
n
FFxx x= vanishes also outside the origin, then we say that it is of constant
sign (positive or negative). For instance, the function
642
123
Fx x x=++ is positive
definite, while the function
2
12
()Fxx=− −
is of constant sign (negative).
One sees immediately that the origin represents a minimum (maximum) for a
positive (negative) definite function; hence, the derivative of first order vanishes at the
origin too, so that, in a Maclaurin expansion into series, we can write
2
11
1
...,
2
nn
ij i j ij
ij
ij
F
Fcxxc
xx
==
∂
=+=
∂∂
∑∑
,
(23.1.10)
where we have neglected the terms of higher order. The linear terms must vanish,
otherwise
F cannot be of a definite sign. The quadratic form
11
1
, , , 1,2,...,
2
nn
ij i j ij ji
ij
cxx c c ij n
==
==
∑∑
,
(23.1.11)
determines the sign of the function
F in a sufficiently small neighbourhood of the
origin, so that a study of it becomes necessary. Hence, if the quadratic form is positive
(negative) definite, then the function
F is positive (negative) definite too.
Stability and Vibrations
513
Sylvester’s criterion gives a necessary and sufficient condition for the quadratic form
to be positive definite. For this, let be the determinants
11 12
1
21 22
2
12
...
...
,1,2,...,
... ... ... ...
...
k
k
k
kk kk
cc c
cc c
kn
cc c
Δ= =
(23.1.11')
introduced by Jacobi, starting from the matrix
[]
11 12 1
21 22 2
12
...
...
.
... ... ... ...
...
n
n
ij
nn
nn
cc c
cc c
c
cc c
=
(23.1.11'')
If all the determinants are positive (
0, 1,2,...,
k
knΔ> = ), then the quadratic form
is positive definite (it can be written in the form of a sum of squares, after Jacobi’s
formula). If the function
F is negative definite, then the function F− is positive
definite and all the coefficients
ij
c change of sign; in this case, the necessary and
sufficient condition that the quadratic form be negative definite is expressed by means
of the determinants
k
Δ too; the determinants of even index must be positive, while
these of odd index must be negative (
( 1) 0, 1,2,..,
k
k
kn−Δ> = ).
One can show that, if the function
F is of definite sign, then the surface
12
( , ,..., ) , const
n
FFxx x CC===, is a closed surface, the origin being in the
interior.
Observing that
( ), 1,2,...,
kk
xxtk n==, it is useful to calculate also the total
derivative of the function
F with respect to time
,,
11
d
d
dd
nn
i
iii
ii
x
F
FFX
tt
==
==
∑∑
,
(23.1.12)
where we have considered the equations
12
d
( , ,..., ), 1,2,...,
d
i
n
i
x
Xxx x i n
t
==
;
(23.1.12')
the sign of the function
d/dFt can give interesting informations concerning the
motion of the representative point
,
s
PnsΛ∈=.
Assuming that the function
F is positive definite, then the vector
gradF
is normal
to the surface
FC=
and is directed towards the exterior (in the increasing sense of
the function
F ); we can write
MECHANICAL SYSTEMS, CLASSICAL MODELS
514
d
grad
d
F
F
t
=⋅
v
(23.1.12'')
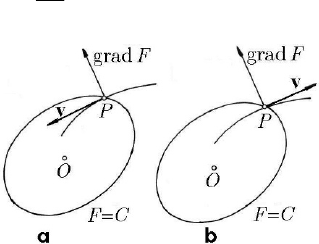
Fig. 23.3 The piercing of the surface FC= by the trajectory of the representative
point for
d/d 0Ft< (a) and for d/d 0Ft> (b).
too, where v is the velocity of the representative point
P . It results thus that: if
d/d 0Ft< , then the trajectory of the point P pierces the surface FC= from the
exterior towards the interior (Fig. 23.3a); if
d/d 0Ft> , then the trajectory of the
point
P pierces the surface FC= from the interior towards the exterior (Fig. 23.3b),
while if
d/d 0Ft= , d/d 0Ft> , then the trajectory of the point P is tangent to the
surface
FC=
(eventually, it can stay on this surface). If the function
F
is negative
definite, then one can make inverse affirmations.
23.1.1.3 Lagrange–Dirichlet Theorem
In Sect. 4.1.1.7 we have stated the Theorem 4.1.2, according to which the position of
equilibrium of a particle subjected only to the action of a given gravitational field is a
position of stable or instable (labile or indifferent) equilibrium, as this one has a
minimal or non-minimal (maximal or stationary) applicate, respectively. This result,
obtained by E. Torricelli in 1644, can be extended to the case of a mechanical system,
stating thus.
Theorem 23.1.1 (E. Torricelli). The position of equilibrium of a discrete mechanical
system
S , subjected only to the action of a given gravitational field, is a position of
stable, labile or indifferent equilibrium as the gravity centre of the system has a
minimal, maximal or stationary applicate (with respect to a frame of reference, one of
the axes of which is along the direction of action of the considered field – assuming that
it is uniform – having a sense opposite to this action).
This is the first important result concerning the stability of the position of
equilibrium of a mechanical system, which corresponds to a particular case of given
external forces (gravitational field, hence, own weight), but valid both for a discrete and
continuous mechanical system.
Let us try now to enlarge the frame of our study to the case of conservative forces,
starting from a simple potential. For this, we will deal only with a discrete mechanical
system
S , the configuration of which is specified by the representative point
P
, of
generalized co-ordinates
12
, ,...,
s
qq q, in the space of configurations
s
Λ . Let be
Stability and Vibrations
515
12
... 0
s
qq q====, the considered position of equilibrium. The potential function
12
(,,..., )
s
UUqq q= is determined neglecting an additive constant, which we choose
so as to have
(0, 0,...,0) 0UU==.
We suppose that the origin corresponds to an isolated point of extremum for the
function
U , let this one be a maximum; the respective point corresponds to a position
of equilibrium of the discrete mechanical system
S , because
0, 1,2,...,
j
j
U
Qjs
q
∂
===
∂
.
(23.1.13)
In this case, in a Δ -neighbourhood of the origin
| | , 1,2,...,
j
qj s<Δ =
, will take
place the strict inequality
12
( , ,..., ) (0,0,...,0) 0
s
UUqq q U=<=, assuming that not
all the generalized co-ordinates vanish simultaneously. The mechanical energy will be
expressed in the form
12 12
1
( , ,..., , , ,..., )
2
ss
j
jk k
Eq q q q q q T U g qq U=−= − ;
(23.1.14)
if at least a generalized velocity is non-zero (neither we assume that the origin is a
singular point, nor the
Δ -neighbourhood of the origin contains such a point), then we
have
0T > , so that it results 0E > in the Δ -neighbourhood of the origin, if not all
the canonical co-ordinates vanish. Hence, the mechanical energy has an isolated
minimum (equal to zero) at
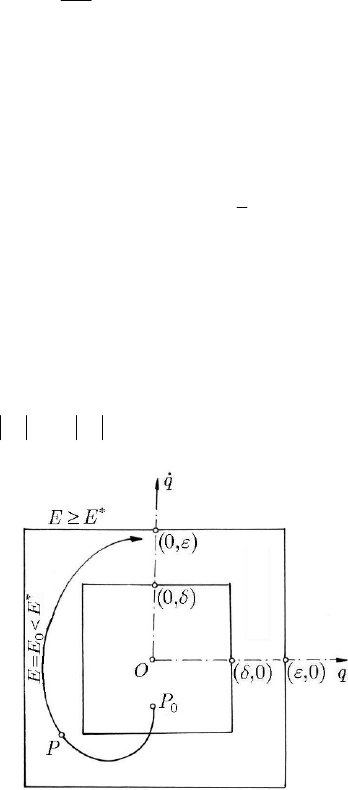
O . Let be an arbitrary number ε so that 0 ε<<Δ and let
be the
ε -neighbourhood defined by (Fig. 23.4, for 1s = )
, , 1,2,...,
jj
qqj sεε<<= .
(23.1.15)
Fig. 23.4 Graphical representation of the Lagrange–Dirichlet theorem in the phase plane
The frontier of this neighbourhood being a closed set of points, the function
E attains
its minimum
∗
> 0E on this frontier, on which we will have, obviously,
MECHANICAL SYSTEMS, CLASSICAL MODELS
516
∗
−≥ >0EE ; but the continuous function E vanishes at the origin, hence it will
exist always a
δ -neighbourhood ( ≤δε) of the point O so that, in this
neighbourhood,
∗
<EE. Therefore, at the initial moment the conditions (23.1.1') hold,
then the initial mechanical energy
0
E verifies the relation
∗
<
0
EE; but the discrete
mechanical system is conservative, so that we have – at any moment –
=
0
EE, hence
∗
<EE too. Consequently, we can state that, in its motion, the representative point P
cannot reach the frontier of the
ε -neighbourhood on which
∗
≥EE, being always in
its interior, We can thus state (we introduce the potential energy
=−VU
)
Theorem 23.1.2 (Lagrange–Dirichlet). If, for a certain position of a conservative
mechanical system
S , the potential energy has an isolated minimum, then this
position is a position of stable equilibrium for it.
This theorem has been enounced by J.-L. Lagrange in 1788, is his famous treatise
“Mécanique analytique” and has been accurately proved, afterwards, by
P.G. Lejeune-Dirichlet. It has been shown in Sect. 4.1.1.7 for the case of a single
particle (Theorem 4.1.4) (Lagrange, J.L., 1788).
If the potential energy
V
has an isolated minimum, then the potential function
=−UV has an isolated maximum.
In case of non-conservative generalized forces, we use the general study made in
Sect. 18.2.1.3, adding to the conservative part of the force a non-conservative part, so
that
∂
=+ = =
∂
12
, ( , ,..., ), 1,2,...,
s
jjjj
j
U
QQQQqqqjs
q
.
(23.1.13')
If the power of the non-potential generalized forces
=
j
j
QqP
vanishes ( = 0P ),
then these forces are gyroscopic, being conservative (they derive from a generalized
potential, depending – obviously – on the distribution of the generalized velocities); one
can use the conservation theorem of mechanical energy (indeed,
ddWV=− ) , so that
the above proof does not change, the Theorem 23.1.2 remaining, further, valid. If
0<P , then the non-potential generalized forces are dissipative. The mechanical
energy
=−ETU decreases in time, in this case, so that ≤
0
EE (instead of
=
0
EE); if
∗
<
0
EE, then it results
∗
<EE too during the motion and further the
Theorem 23.1.2 can be enounced.
One must also show that, in the cases mentioned above (for which
≤ 0P ,
| | , 1,2,...,
j
qj s<Δ =
), the position of equilibrium is maintained. We assume, as
above, that the position of equilibrium takes place for
0, 1,2,...,
j
qj s== . We
assume also that, among the functions
j
Q
, there exists at least one for which
≠(0,0,...,0) 0
j
Q ; in this case, due to the continuity, ≠ 0
j
Q in a Δ -neighbourhood
too. Because the canonical co-ordinates are independent, we can choose their values in
this neighbourhood so that
> 0P , which contradicts the hypotheses of gyroscopic
Stability and Vibrations
517
forces; we have thus a contradiction. Hence, by adding gyroscopic or dissipative forces,
the position of equilibrium remains the same.
We can apply the Theorem 23.1.2 to the example given before (the example in
Fig. 23.1 and the linear oscillator of equation (23.1.2)), the position of equilibrium
being a stable one.
One can show that the position of equilibrium of a conservative discrete mechanical
system (or to which gyroscopic or dissipative forces have been added) is, as well, stable
if the potential energy
V
corresponding to this position has a non-strict minimum, but
is such that, in any
ε -neighbourhood of the position of equilibrium, there exists a
closed hypersurface
=
12
( , ,..., ) 0
s
fq q q which contains this position and on which the
values of the potential energy
V are strictly greater than its value at the position of
equilibrium. For instance, a conservative system with one degree of freedom and a
potential energy
=
42
sin (1/ )Vq q
and =(0) 0V has the position
= 0q
as stable
position of equilibrium.
We have shown in Sect. 1.1.1 how can be expressed a condition of equilibrium by
means of a hypersphere
r
S of equation (23.1.5'); one can obtain thus a proof of the
Theorem 23.1.2 in a synthetic but rigorous form. We introduce an isoenergetic
hypersurface formed by the set of representative points
P (in the phase space
2s
Γ ),
the canonical co-ordinates of which verify the condition
min
() ( ) , constEP EP c c−==;
(23.1.16)
the mechanical energy
()EP has an isolated minimum at
min
P and the constant c can
take arbitrary values (positive values on isoenergetic hypersurface which have points in
the neighbourhood of
min
P ). If = 0c , then the hypersurface is reduced to the point
min
P . The mechanical energy E is a continuous function so that, for increasing
positive, small values of
c , the corresponding isoenergetic hypersurfaces are closed,
each of them containing the point
min
P , as well as all the preceding hypersurfaces, in
the order in which the constant
c increases. Taking into account that the mechanical
energy is conserved during the motion (the generalized forces are conservative or
quasi-conservative), the representative point
P describes a curve situated on the
isoenergetic hypersurface which passes through
0
P , corresponding to the state of the
discrete mechanical system at the initial moment; the constant
c has the value
=−
0
min
() ( )cEP EP .
(23.1.16')
For the trajectory of the representative point
P
be in the interior of the hypersphere S
ε
it is necessary and sufficient that to the initial perturbation of the state of equilibrium
does correspond a representative point
0
P
, which belong to an isoenergetic
hypersurface situated entirely in
S
ε
; taking into account how the isoenergetic
hypersurfaces are situated around
min
P
, it results that such a choice of the initial
perturbation
0
P is always possible, the Theorem 23.1.2 being thus proved.

MECHANICAL SYSTEMS, CLASSICAL MODELS
518
In the case of a discrete mechanical system of
n particles, of masses
i
m , of weights
i
mg and applicates , 1,2,....,
i
zi n= , with respect to a horizontal plane (in opposite
sense to the gravity action), the potential energy is given by
==
−= = =
∑∑
11
,
nn
ii i
ii
UmgzMgzMm,
(23.1.17)
where
z is the applicate of the gravity centre, we find again Torricelli’s theorem ( −U
has an isolated minimum if the applicate
z is minimal). The theorem remains valid if,
besides particles, the discrete mechanical system contains rigid solids too.
23.1.1.4 Stability of the Equilibrium of an Autonomous Discrete Mechanical
System with One Degree of Freedom, in Linear Approximation
We begin the study of an autonomous discrete mechanical system with the most
simple case, that in which there is only one degree of freedom; the phase space
2
Γ has
two dimensions, the representative point
P
being of canonical co-ordinates
,qp
(the
generalized co-ordinate and the generalized momentum). Hamilton’s system of
differential equations can be written in the autonomous general form
==
12
112 212
dd
(, ), (, )
dd
xx
Xxx Xxx
tt
.
(23.1.18)
The Cauchy–Lipschitz theorem 19.1.2
of existence and uniqueness ensures us, in
sufficiently large conditions, that through any point of the phase space passes only one
integral curve of the system (23.1.18) (
11 22
(), ()xxtxxt==), which satisfies the
given initial conditions (in a Cauchy problem); hence, two integral curves cannot have
common points.
Let
1122
, xxαα== be a position of equilibrium so that
112
(, )X αα
==
212
(, ) 0X αα ; one can thus obtain all the positions of equilibrium. By the
translation
111222
, xx xxαα→+ →+ one obtains ==
12
(0,0) (0,0) 0XX ; one
can thus admit, without any loss of generality, that the origin represents a position of
equilibrium. Assuming that, in general,
≠
112
(, ) 0Xxx , we can write.
=
212
2
1112
(, )
d
d(,)
Xxx
x
xXxx
,
(23.1.18')
so that, at a regular point (for which
+≠
22
12
0xx ), the tangent to the integral curve is
well determined; if
==
12
0XX
, then the tangent is non-determined, having to do
with a singular point (e.g., the origin). We expand into a Maclaurin series and obtain
112 111 122 112
212 211 222 212
(, ) (, ),
(, ) (, ),
Xxx ax ax Rxx
Xxx ax ax Rxx
=++
=++
(23.1.19)

Stability and Vibrations
519
where
12
,RR are remainders (higher powers of the variables
12
,xx) and where
=,, 1,2
ij
aij , are constants.
In linear approximation, we consider the system (called the system of the first
approximation too)
=+ =+
12
11 1 12 2 21 1 22 2
dd
,
dd
xx
ax ax ax ax
tt
;
(23.1.20)
the corresponding characteristic equation is
11 12
21 22
det det 0
aa
aa
λ
λ
−
⎡⎤
==
⎢⎥
−
⎢⎥
⎣⎦
A
(23.1.20')
or, in a developed form,
−+ + − =
2
11 22 11 22 12 21
() 0aa aaaaλλ .
(23.1.20'')
The roots
1
λ and
2
λ of this equation are the eigenvalues of the matrix A and the form
of the integral curves in the neighbourhood of the position of equilibrium depends on
them.
The solution of the system of differential equations is, in this case, of the form
() ()
=+ = − +−
⎡
⎤
⎣
⎦
12 1 2
11 2 2 111 212
2
1
ee, e e
tt t t
x C C x aC aC
a
λλ λ λ
λλ,
(23.1.21)
where
12
,CC are two integration constants; by a change of axes, passing from the
orthogonal Cartesian system
12
Ox x to the oblique Cartesian system
12
Oξξ defined by
the relations
()()
[]
=+ = − + −
1122 111 212
2
1
,xx a a
a
ξξ λ ξ λ ξ,
(23.1.21')
one obtains the parametric representation
==
12
11 22
e, e
tt
CC
λλ
ξξ.
(23.1.21'')
(i) Distinct real roots of the same sign. Eliminating the time
t between the equations
(23.1.21''), we get
=
21
n
Cξξ,
(23.1.22)
where
=
21
/n λλ, and C is a new integration constant, specified by the initial
conditions; the curve are parabolas of degree
n .
MECHANICAL SYSTEMS, CLASSICAL MODELS
520
If
<
12
||||λλ, then it results > 1n , and the parabolas tend to be tangent at the
origin to the
1
Oξ -axis (Fig. 23.5a); if >
12
||||λλ, then it results < 1n and the
parabolas tend to be tangent at the origin to the
2
Oξ
-axis (Fig. 23.5b). The respective
singular point is called node.
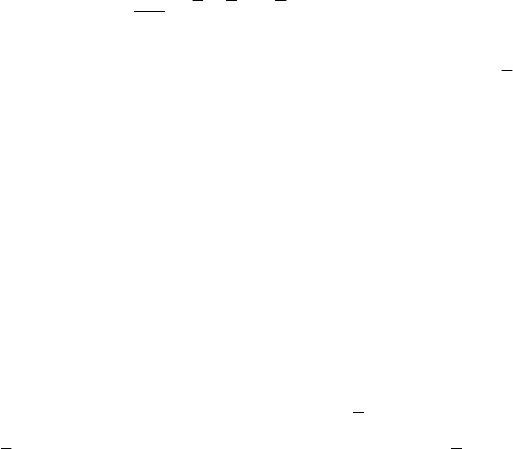
Fig. 23.5 Representation of the solution for real positive distinct eigenvalues λ:
(a)
12
λλ<
; (b)
12
λλ>
, around an instable node
If the roots
1
λ and
2
λ are both positive and if t increases, then the representative
point moves away from the singular point, which is an instable node (Fig. 23.5), while
if the roots
1
λ and
2
λ are both negative and if t increases, then the representative
point comes close to the singular point, which is – in this case – a stable asymptotic
node (Fig. 23.6).
Fig. 23.6 Representation of the solution for real negative distinct eigenvalues λ:
(a)
12
λλ< ; (b)
12
λλ> , around a stable node
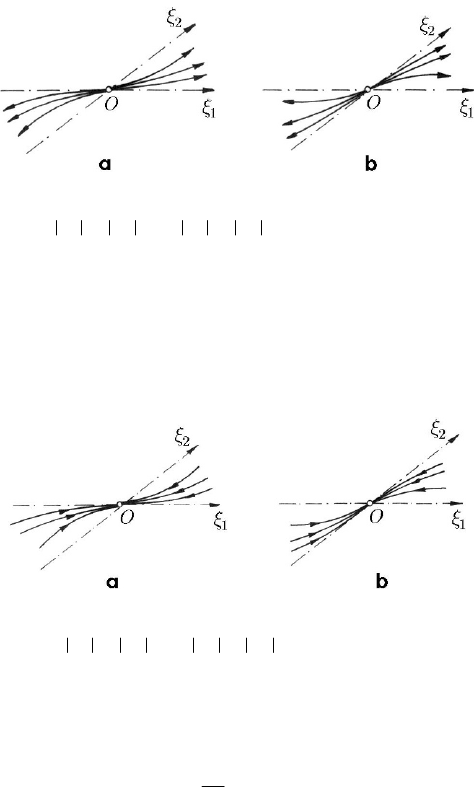
(ii) Real roots of opposite signs. Assuming that
12
0, 0λλ>< and denoting
=−
12
/n λλ, we obtain curves of the form
=
2
1
n
C
ξ
ξ
,
(23.1.22')
hence a family of hyperbolas of degree
n . The singular point is called saddle
(Fig. 23.7). If
→∞t , then →∞
1
ξ and →∞
2
ξ , the representative point moving off
from the origin. A saddle point is instable. If
12
0, 0λλ<>, then the trajectories are
the same, but they are traveled through in an inverse sense. We mention that, in the first
Stability and Vibrations
521
case, the
2
Oξ -axis is a stable variety (Fig. 23.7), while, in the second case, the
1
Oξ -axis is such a variety.
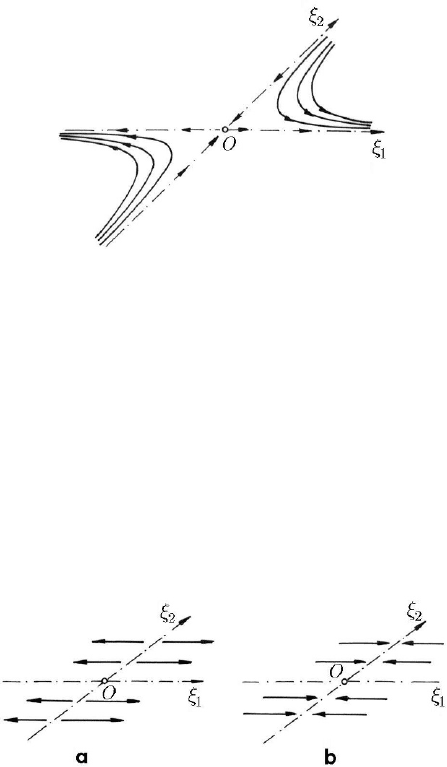
Fig. 23.7 Representation of the solution for real eigenvalues λ of opposite signs,
around an instable saddle point
(iii) A non-zero root and a zero root. Let
=
1
λλ and =
2
0λ be the roots; we can
write
==
1122
e,
t
CC
λ
ξξ.
(23.1.23)
The trajectories in the phase plane are semi-straight lines parallel to the
1
Oξ -axis,
which start from the vicinity of the
2
Oξ -axis if > 0λ (Fig. 23.8a) or tend to this axis
for
→∞t if < 0λ (Fig. 23.8b). Outside the origin, there are still positions of
equilibrium on the
2
Oξ -axis, for =
1
0C and
2
C arbitrary.
Fig. 23.8 Representation of the solution for the eigenvalues
1
λλ=
,
2
0λ =
:
(a) 0
λ > ; (b) 0λ < .
(iv) Double roots. In case of a double root, obvious real, we have
==
12
λλλ. We
distinguish two subcases:
(a) The equations are uncoupled and we can use the results of case (i) with
= 1n .
The trajectories of the representative point form a family of semi-straight lines,
concurrent at the origin; if the roots are positive and
t increases, then the representative
point moves away from the origin, obtaining a unstable star (Fig. 23.9a), while if the