Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
452
we get, successively,
= ()tψψ and = ()tϕϕ . By means of the constraint relations
(22.1.3'), we can calculate the co-ordinates
′
1
x and
′
2
x too.
The problem can be formulated also in the quasi-co-ordinates
5
1234
,,,,πππππ
defined by the relations
=+ ==
=+ =+
11223
5
41 2
dcosdsind,dd,dd,
dd cosd,dd sind;
xx
xR xR
πψ ψπψπθ
πψϕπψϕ
(22.2.56)
one can thus write the corresponding equations of Lagrange.
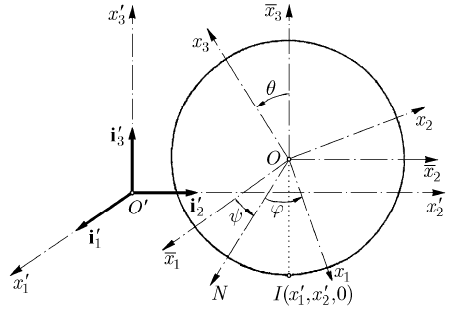
22.2.3.3 Motion of a Sphere on a Horizontal Plane
Let be a heavy rigid sphere of radius R and mass
M
, which can have a rolling and
pivoting motion on a fixed plane
′′′
12
Oxx , linked to the fixed frame of reference
′
R ,
the co-ordinates
′′
12
,xx corresponding to the contact point I with this plane; we take
the origin
O of the movable frame R at the centre of the sphere, the positions of its
axes with respect to the fixed frame being specified by Euler’s angles
,,ψθϕ. The
motion of the sphere can be thus studied in the space
5
Λ , the generalized co-ordinates
being
′′
12
,,,xxψθ and ϕ (Fig. 22.13).
Fig. 22.13 Motion of a sphere on a horizontal plane
Assuming that the sphere is rolling and pivoting without sliding on the fixed plane,
we can equate to zero the velocity of the contact point
′′
=+×=
vv
IO
OI 0
J
JG
ω ;
(22.2.57)
observing that
12 3
12 3
, , , ,
j
OOj O O O
xxxxxxROIR
′′′′ ′′ ′′ ′
=====−
J
JG
ri i
, we can
write the above condition in the form
()
′′′′′
−− =
rii
21 12
dd0
O
Rtωω .
(22.2.57')
Dynamics of Non-holonomic Mechanical Systems
453
We project on the axes of the movable frame and find the constraint relations (by means
of the formulae (5.2.35'))
()
()
′
=−
′
=− +
1
2
d sin d sin cos d ,
dcosdsinsind.
xR
xR
ψθ θ ψϕ
ψθ θ ψϕ
(22.2.57'')
Let us assume that the equations (22.2.57'') admit an integrable combination; in this
case, by integration, we get
()
′′
=
12
,,,, 0fxx ψθϕ .
Taking into account the conditions (22.2.57''), the differential consequence
∂∂∂∂∂
′′
++++=
′′
∂∂∂∂∂
12
12
d d ddd0
fffff
xx
xx
ψθ ϕ
ψθϕ
must be identically satisfied. Hence, besides the condition
∂∂=/0f ψ we will have
∂∂ ∂
⎛⎞
+−=
⎜⎟
′′
∂∂ ∂
⎝⎠
∂∂∂
⎛⎞
−+=
⎜⎟
′′
∂∂∂
⎝⎠
12
12
sin cos 0,
sin cos sin 0.
ff f
R
xx
fff
R
xx
ψψ
θ
θψ ψ
ϕ
Differentiating the above relations with respect to
ψ
and taking into account
∂∂=/0f ψ , we see that the brackets in these relations vanish, so that
∂∂=∂∂=//0ffθϕ; we obtain, from (22.2.57''), also
′′
∂∂=∂∂ =
12
//0fx fx . It
results that the function
f does depend on no one of the five generalized co-ordinates.
We can thus state that the considered rigid sphere represents a non-holonomic and
scleronomic mechanical system with three degrees of freedom. Such a problem is put,
e.g., in the study of motion of a billiard ball.
We can write the constraint relation (22.2.57'') in the form
()
()
′
−− =
′
++ =
1
2
sin sin cos 0,
cos sin sin 0,
xR
xR
θψϕθψ
θψϕθψ
(22.2.57''')
the generalized co-ordinates being
′′
=====
5
11223 4
,,,,qxqxq q qψθϕ; by
comparing the constraint relations (22.2.14) with (22.2.57'''), we get
== ==
=− =
====
==
10 11 12 13
14 15
20 21 22 23
24 25
0, 1, 0, 0,
sin , sin cos ,
0, 0, 1, 0,
cos , sin sin .
aa aa
aRaR
aaaa
aR aR
ψθψ
ψθψ
The kinetic energy is given by (
===
2
123
(2/5)III MR, formula (3.1.27))
MECHANICAL SYSTEMS, CLASSICAL MODELS
454
()()
()
′ ′′ ′′′
=++ ++
⎡⎤
′′
=+++++
⎢⎥
⎣⎦
22 2222
12 1 2 3
22 2222
12
11
25
12
2cos ,
25
TMxx MR
Mx x R
ωωω
ψθϕ ψϕθ
(22.2.58)
where we took into account the formula (5.2.35'). Assuming that the fixed plane is
horizontal, we notice that the work of the own weight vanishes (
==0, 1,2, 3,4,5
j
Qj );
Lagrange’s equations with multipliers (22.2.13) will be
()
′′
== +=
11 22
d
,, cos0
d
Mx Mx
t
λλψϕθ
,
(22.2.59)
()
()
+=−−
12
2
cos sin cos
5
MR θψϕ θ λ ψλ ψ
,
(22.2.59')
()
()
+= +
12
2d
cos cos sin sin
5d
MR
t
ϕψ θ λ ψλ ψ θ
.
(22.2.59'')
The first two equations (22.2.59) specify the motion of the centre
O of the sphere in
the plane
′
==
3
constxR , the trajectory being rectilinear and the motion uniform; the
third equation (22.2.59) leads to a first integral of the moment of momentum in the
form (we take into account the formula (5.2.35'))
′
′
+=+ =
3
2
5
cos , const
2
O
AA K
MR
ψϕ θ ,
(22.2.60)
where
′
′
3O
K is the constant component of the moment of momentum along the
′′
3
Ox -axis.
Because
′
=
3
constx , it results a potential = constU , so that the conservation
theorem of mechanical energy is reduced to
′
=Th
, = consth , hence to
()
′′
++ +++ =
22 2222
12
22
2cos
5
h
xx R
M
ψθϕ ψϕθ
.
Taking into account the constraint relations (22.2.58), one can write the above first
integral in the form
()()
+=++ =
222 222
2
72 2
sin cos 2 cos
55
h
MR
θϕ θ ψϕ θψϕθ
;
finally, by means of the first integral (22.2.60), the first integral of mechanical energy
becomes
()
′
′
+== −
222 22
3
2
5
sin , 2
7
O
BB hAK
MR
θϕ θ
.
(22.2.61)
From the first two equations (22.2.59) and from the relation (22.2.57'''), it results
Dynamics of Non-holonomic Mechanical Systems
455
()
()
−=+
⎡
⎤
+= −
⎢
⎥
⎣
⎦
12
12
sin cos sin ,
d
cos sin sin ,
d
MR
MR
t
λψλ ψ θψϕθ
λψλψ ψθ ϕθ
so that we can eliminate Lagrange’s multipliers. Thus, the relation (22.2.59') leads to
+=sin 0θψϕ θ
,
(22.2.62)
while the relation (22.2.59'') leads to the relation
()
()
⎡⎤
+=−
⎢⎥
⎣⎦
2d d
cos sin sin
5d dtt
ϕψ θ ψθ ϕ θ θ
,
which can be written in the form
()
()
⎡⎤
+=−
⎢⎥
⎣⎦
2d d
cos sin sin
5d d
ϕψ θ ψ ϕ θ θ
θθ
too, after simplifying by
≠ 0θ
. Replacing
ϕ
given by (22.2.60) and effecting the
computations, we get
+
+=
d3cos 2
dsin2 sin2
Aψθ
ψ
θθ θ
,
wherefrom, by integration, it results
2
sin cos , constAC Cψθ θ=+ =
.
(22.2.63)
We have thus obtained three first integrals (22.2.60), (22.2.61) and (22.2.63),
sufficient to determine the angular velocities
,ψθ
and ϕ ; the integration constants
,,ABC
are determined by imposing initial conditions for these velocities.
Eliminating
ψ
and
ϕ
between (22.2.60), (22.2.61) and (22.2.63), it results
()
+
=−
2
22
2
cos
sin
CA
B
θ
θ
θ
,
(22.2.64)
wherefrom, by a quadrature, we obtain
= ()tθθ ; the equations (22.2.63) and (2.2.60)
lead then, successively, to
= ()tψψ and = ()tϕϕ , by two other quadratures.
Replacing
ψ
and ϕ in (22.2.62), one observes easily that (22.2.64) is a first integral
of this differential equation.
Let us assume now that the horizontal plane is rotating with a constant angular
velocity
Ω about the
′′
3
Ox -axis. In this case, the constraint relations (22.2.58) are
completed in the form
MECHANICAL SYSTEMS, CLASSICAL MODELS
456
()
()
′′
−− +=
′′
++ −=
12
21
sin sin cos 0,
cos sin sin 0;
xR x
xR x
θψϕθψΩ
θψϕθψΩ
(22.2.65)
hence, the mechanical system remains non-holonomic and scleronomic, with three
degrees of freedom.
Besides the generalized co-ordinates
5
1234
,,,,qqqqq introduced above, we denote
=
6
qt
too; the quasi-co-ordinates
, 1,2,...,6
i
iπ =
, will be specified by the
differential relations
()
()
′′
=− + − −
′′
=+ + −
′
==+
′
== +
′
== −
=
11 2
22 1
33
41
5
2
6
d d sin d sin cos d d ,
dd cosdsinsind d,
dddcosd,
ddcosdsinsind,
d d sin d sin cos d ,
dd,
xR xt
xR xt
t
t
t
t
πψθθψϕΩ
πψθθψϕΩ
πω ψ θϕ
πω ψθ θψϕ
πω ψθ θψϕ
π
(22.2.66)
while the corresponding virtual variations will be given by
()
()
′
δ=−δ+ δ− δ
′
δ=δ+ δ+ δ
δ=δ+ δ
δ= δ+ δ
δ= δ− δ
δ=
11
22
3
4
5
6
sin sin cos ,
cos sin sin ,
cos ,
cos sin sin ,
sin sin cos ,
0.
xR
xR
πψθθψϕ
πψθθψϕ
πψ θϕ
πψθθψϕ
πψθθψϕ
π
(22.2.67)
Solving the systems (22.2.66) and (22.2.67) with respect to the real and virtual
generalized displacements, respectively, we obtain
′′
=− + −
′′
=− +
=− +
=+
=−
=
5
11 26
22 416
5
34
5
4
5
4
6
ddd d,
dd d d,
d d sin cot d cos cot d ,
dcosd sind,
d sin cosec d cos cosec d ,
dd,
xRx
xRx
t
ππΩπ
ππΩπ
ψπ ψθπ ψθπ
θψπ ψπ
ϕψθπ ψθπ
π
(22.2.66')
as well as
Dynamics of Non-holonomic Mechanical Systems
457
′
δ=−δ+δ
′
δ=δ−δ
δ=δ − δ + δ
δ= δ + δ
δ= δ − δ
δ=
5
11
22 4
5
34
5
4
5
4
,
,
sin cot cos cot ,
cos sin ,
sin cosec cos cosec ,
0.
xR
xR
t
ππ
ππ
ψπ ψθπ ψθπ
θψπ ψπ
ϕψθπ ψθπ
(22.2.67')
The relations (22.2.17) lead to the matrices
[]
′
−−−
⎡⎤
⎢⎥
′
−
⎢⎥
⎢⎥
⎢⎥
=
⎢⎥
⎢⎥
⎢⎥
−
⎢⎥
⎢⎥
⎣⎦
2
1
100 sin sincos
010 cos sinsin
001 0 cos 0
000 cos sinsin 0
000 sin sincos 0
000 0 0 1
ij
RR x
RR x
ψθψΩ
ψθψΩ
θ
α
ψθψ
ψθψ
,
[]
′
−−
⎡⎤
⎢⎥
′
−−
⎢⎥
⎢⎥
−
⎢⎥
=
⎢⎥
⎢⎥
⎢⎥
−
⎢⎥
⎢⎥
⎣⎦
2
1
100 0
010 0
001 sincot coscot 0
000 cos sin 0
0 0 0 sin cosec cos cosec 0
000 0 0 1
ij
Rx
Rx
Ω
Ω
ψθ ψθ
β
ψψ
ψθ ψθ
;
the formulae (22.1.23) allow to calculate
=− = =− =− =− =
=− =− =− = =− =−
=− = =− =− =− =
11 11 11
34 43 26 62 46 64
22 22 22
35 53 16 61 56 65
33 44 55
45 54 35 53 34 43
,,,
,, ,
1, 1, 1.
RR
RR
γγ γγΩγγΩ
γγ γγΩγγ Ω
γγ γγ γγ
The transposition relations (22.1.24') are given by
()()
()()
δ−δ = δ− δ − δ−δ
δ−δ =− δ− δ + δ−δ
δ−δ = δ− δ
δ−δ = δ− δ
δ−δ = δ− δ
δ−δ =
11 3443 642
55 5
22 3 3 6 1
55
334 4
55
44 33
55
34 43
66
dd d d d ,
dd d d d ,
ddd d,
ddd d,
ddd d,
dd0.
RR
RR
ππ ππππΩπππ
ππ ππππΩπππ
ππππππ
ππππππ
ππππππ
ππ
.
(22.2.68)
MECHANICAL SYSTEMS, CLASSICAL MODELS
458
Lagrange’s equations in quasi-co-ordinates (22.2.22) become (we have
*
0, 1,2,...,6
j
Qj== )
⎛⎞
∂∂ ∂
−− =
⎜⎟
∂∂ ∂
⎝⎠
⎛⎞
∂∂ ∂
−+ =
⎜⎟
∂∂ ∂
⎝⎠
⎛⎞ ⎛ ⎞
∂∂ ∂ ∂ ∂ ∂
−− − + − =
⎜⎟ ⎜ ⎟
∂∂ ∂ ∂ ∂ ∂
⎝⎠ ⎝ ⎠
** *
11 2
** *
22 1
** * * * *
55
44
5
33 1 2 4
d
0,
d
d
0,
d
d
0,
d
TT T
t
TT T
t
TT T T T T
R
t
Ω
ππ π
Ω
ππ π
ππ ππ
ππ π π π π
(22.2.69)
()
()
⎛⎞
∂∂ ∂ ∂ ∂
−+ −− + =
⎜⎟
∂∂ ∂ ∂ ∂
⎝⎠
⎛⎞
∂∂ ∂ ∂ ∂
−+ −+ + =
⎜⎟
∂∂ ∂ ∂ ∂
⎝⎠
⎛⎞ ⎛ ⎞
∂∂ ∂ ∂
−+ − =
⎜⎟ ⎜ ⎟
∂∂ ∂ ∂
⎝⎠ ⎝ ⎠
** * * *
5
33
5
44 1 3
** * * *
343
55
234
** * *
5
4
66 1 2
d
0,
d
d
0,
d
d
0,
d
TT T T T
R
t
TT T T T
R
t
TT T T
R
t
πΩ π π
ππ π π π
πΩ π π
ππ π π π
Ωπ π
ππ π π
(22.2.69')
where we noticed that
==
12
0ππ
(the constraint relations (22.2.65)) and
=
6
1π
.
Taking into account (22.2.65), (22.2.66), we can express the kinetic energy in the form
()()
()
22
* 22 2 2
5 5
126241634
1
,
2
TM R x R x iππΩπ ππΩπ πππ
′′
⎡
=−++−++++
⎤
⎦
⎣
(22.2.58')
where we have introduced the gyration radius
i given by =
2
/iIM.
We can calculate
()
()
∂∂
′′
=− − = + −
⎡
⎤
⎣
⎦
∂∂
**
22
5
241
14
,
TT
MR x M R i RxπΩ π Ω
ππ
,
()
()
∂∂
′′
=− − = + −
⎡
⎤
⎣
⎦
∂∂
**
22
5
41 2
5
2
,
TT
MR x M R i RxπΩ π Ω
ππ
,
()
()
∂∂
′′ ′ ′
==+−+
⎡
⎤
⎣
⎦
∂∂
**
222
5
312141
36
,;
TT
Mi M x x R x xπΩΩ ππ
ππ
as well, taking into account (22.2.19), we get
() ()
∂∂
′′
=+ = −
∂∂
**
55
22
14
,
TT
MR x MR R xπΩ ΩπΩ
ππ
,
() ()
∂∂
′′
=− − =− −
∂∂
**
41 41
5
2
,
TT
MR x MR R xπΩ ΩπΩ
ππ
,
()
∂∂
′′
== −
∂∂
**
2
5
24 1
36
0,
TT
MR x xΩπ π
ππ
.

Dynamics of Non-holonomic Mechanical Systems
459
The third equation (22.2.69) leads to
=
3
0π , hence to
′
==
33
constπω ,
(22.2.70)
and the fourth and the fifth equation of this system lead to (
5
41 2
, πωπω
′′′
==)
()
()
()
()
′′′
+− −=
′′′
++ −=
22
122
22
211
0,
0,
Ri RR x
Ri RR x
ωΩωΩ
ωΩωΩ
(22.2.70')
where we took into account the constraint relations (22.2.65); using, further, these
relations and integrate them, we obtain
() ()
() ()
′′
+−= +
′′
+−= +
22 22
111
22 22
222
,
,
Ri RxCRi
Ri RxCRi
ωΩ
ωΩ
(22.2.71)
1
C and
2
C being arbitrary constants. The same relations (22.2.65) allow to eliminate
the components of the rotation vector, so that
′′
+=
′′
−=
122
211
,
,
xxCR
xxCR
Ω
Ω
(22.2.72)
with the notation
=+
222
[/( )]iRiΩΩ; there result the equations
()
()
′′
+= = −
′′
−= = +
2
1133 21
2
2244 12
,,
,,
xxCCRCC
xxCCRCC
ΩΩ
ΩΩ
(22.2.72')
the integration constants being determined by initial conditions.
Hence, in general, the centre of the sphere which moves on a rough horizontal plane,
which is rotating with a constant angular velocity about a fixed axis, describes an
ellipse, the parameters of which depend on the initial conditions and which is fixed with
respect to the inertial frame of reference.
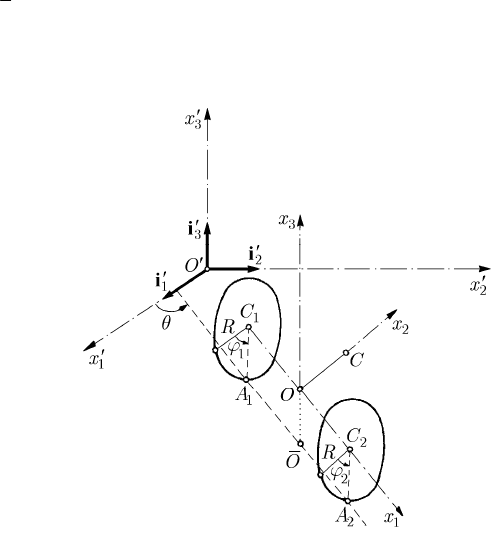
22.2.3.4 Motion of the Two-Wheeled Carriage
Let us consider a Roman carriage, formed by a rigid solid S of mass M ,
supported at the points
1
A and
2
A on a horizontal plane
′′′
12
Oxx by two equal wheels,
of radii
R and masses m , which are independently rotating with the velocities
1
ϕ and
2
ϕ , about the centres
1
C and
2
C , respectively; the movable frame of reference has the
pole at the middle of the distance between the two centres (
=
12
2CC a), the
1
Ox -axis
being along the line of the centres, which makes the angle
θ with the
′′
1
Ox -axis, the
2
Ox -axis being horizontal, while the
3
Ox -axis is vertical and parallel to the
′′
3
Ox -axis.
The mass centre
C
of the car is on the
2
Ox
-axis, so that =OC l (Fig. 22.14).
MECHANICAL SYSTEMS, CLASSICAL MODELS
460
Let
O be the projection of the pole O on the plane
′′′
12
Oxx of co-ordinates
′′
12
,xx;
in this case, the variables
′′
=====
5
11223 4 1 2
,,,,qxqxq q qθϕ ϕ can form a
system of generalized co-ordinates.
Fig. 22.14 Motion of a two-wheeled carriage
Assuming that the wheels are rolling and pivoting without sliding on the fixed plane,
we impose the condition that the velocities of the points of both wheels, which – at the
considered moment – coincide with the points of contact
1
A and
2
A , respectively, do
vanish. Thus, for the point
2
A we can write
′′ ′
=+× =+× +× =
vv v
22 2
2
0
21 2 22
CC O C
A
CA OC CA 0
J
JJJJG JJJJJG
J
JJJG
ωωω,
where
()
()
′′′′′ ′ ′ ′
=+ = + =−
′′′
== +
vii i i i
iii
2
11 22 2 1 2 2 2 3
0
3212
,cossin, ,
,cossin,
O
C
xxOCa CARθθ
θϕθθ
J
JJJJG
J
JJJG
ωω
′
=
i ,1,2,3
k
k , being the unit vectors of the axes of the fixed frame of reference.
Projecting on the axes of this frame, we obtain (the projection on the
′′
3
Ox -axis is
identically equal to zero)
() ()
12 22
sin 0, cos 0xaR xaRθϕ θ θϕ θ
′′
−+ = ++ =
.
(22.2.73)
Analogously, equating to zero the absolute velocity of the point
A , it results
Dynamics of Non-holonomic Mechanical Systems
461
() ()
11 21
sin 0, cos 0xaR xaRθϕ θ θϕ θ
′′
+− = −− =
.
(22.2.73')
These four constraint relations are not independent (the rank of the matrix of the
unknowns
′′
12 1
,,,xxθϕ
and
2
ϕ is not four). From the relations (22.2.73) and (22.2.73')
one obtains the relations
′′
−=−+=+
12 1 2
sin cosx x aR aRθ θ θϕ θϕ
,
(22.2.74)
wherefrom results the holonomic constraint
()
+−=
21
20aRθϕϕ
;
(22.2.74')
indeed, by integration we have
()
+−=
21
22aR akθϕϕ ,
(22.2.75)
so that one can determine the non-dimensional constant
k if the initial values of the
three angles are given.
As well, from each system of relations (22.2.73) and (22.2.73'), respectively, one
obtains the differential consequence
12
cos sin 0xxθθ
′′
+= ;
(22.2.76)
one can thus see that the velocity
′
v
O
has no component along the axle of the carriage
(the
1
Ox -axis), hence being normal to this one, which was to be expected, because the
axle cannot slide along itself (the velocities of the points
1
A and
2
A vanish at any
moment and the bar
12
CC is rigid). From the relations (22.2.74) we get also the
constraint relation
()
′′
−=+
12 12
1
sin cos
2
xx Rθθϕϕ
.
(22.2.76')
One can show that the system (22.2.76), (22.2.76') does not admit any integrable
combinations, so that the two-wheeled carriage is a non-holonomic system with two
degrees of freedom.
If we denote by
′
0
T the kinetic energy of the carriage (the axle and the mechanical
system which lies on it) with respect to the fixed frame or reference, we can write
()
′′′
=++
2222
0
12
1
2
TMxxiθ
,
(22.2.77)
where
i is the gyration radius of the system with respect to the
3
Ox -axis, in the
hypothesis in which its mass centre is at the point
O . In the case in which the mass
centre is at the point
C (
12
sin , cos , xl xl Rθθ
′′
−+), one must use the velocity of