Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


MECHANICAL SYSTEMS, CLASSICAL MODELS
422
it means that the point
123
(,, )qqq cannot move on any curve in
3
Λ , but only along
some curves which – at any point of them – are normal to the vector
123
(,, )aaa at the
respective point. As we have seen in Sect. 3.2.2.6 (formula (3.2.30'')), the necessary and
sufficient conditions of holonomy is
⋅=
123 123
(,, )curl(,, ) 0aaa aaa .
(22.1.14')
As it has been shown by Carathéodory, if we have
⋅≠
123 123
(,, )curl(,, ) 0aaa aaa in
a given domain, then any two points of this domain can be linked by an admissible
curve (even if the constraint relation (22.1.14) takes place).
In the general case of the constraint relations (22.1.13'), A. M. Lipschitz has
introduced a linear transformation in any point of the space (;)qt , obtaining a
necessary and sufficient condition of holonomy of the form
δ−δ=dd 0Mq Mq ,
(22.1.15)
for any displacements in the
−()sm-dimensional hyperplane; this condition is
equivalent to the conditions expressed in the Theorem 3.2.2 of Frobenius (see Sect.
3.2.2.6). We are thus led to the necessary and sufficient conditions
()
=
δ−δ=
∑
0
dd 0
s
jj
kj kj
j
aq aq .
(22.1.15')
Returning, in particular, to the constraint relation (22.1.14), we obtain the necessary
and sufficient conditions
δ+δ+δ−δ−δ−δ=
11 22 33 11 22 33
dddddd 0aq aq aq aq aq aq
or, in a developed form,
()()
()
∂∂ ∂∂
⎛⎞ ⎛⎞
− δ −δ − δ −δ
⎜⎟ ⎜⎟
∂∂ ∂∂
⎝⎠ ⎝⎠
∂∂
⎛⎞
+− δ−δ =
⎜⎟
∂∂
⎝⎠
23 31
32 23 13 31
32 13
12
21 12
21
dd dd
dd0,
aa aa
qq qq qq qq
qq qq
aa
qq qq
qq
for any
δδδ
123
,,qqq
and
123
d,d,dqqq
which equate to zero the Pfaffian (22.1.14);
this condition can be written also in the form
[
]
⋅δ × =
123 123 123
curl( , , ) ( , , ) d( , , ) 0aaa qqq qqq .
But the displacements
δ(
123
,,)qqq and
123
d( , , )qqq satisfy the conditions
⋅δ = ⋅ =
123 123 123 123
(,, ) (,, ) 0,(,, )d(,, ) 0aaa qqq aaa qqq

Dynamics of Non-holonomic Mechanical Systems
423
being normal to the vector
123
(,, )aaa ; hence, the vector δ( ×
123 123
,,)d(,,)qqq qqq is
collinear with the vector
123
(,, )aaa , obtaining again the condition (22.1.14').
In case of a disc which rolls on a horizontal plane, e.g., one writes the constraint
relations (22.1.3''); we mention that the bilinear covariants
δ− δ − δ+ δsin d sin d , cos d cos dRR RRψψϕ ψϕψ ψψϕ ψϕψ
can vanish only if
==sin 0,cos 0ψψ, the corresponding constraints being thus
non-holonomic.
We say that a function
0
12
( , , ,..., )
s
fq q q q is a first integral of the system (22.1.13) if
for any
0
12
d ,d , d ,...,d
s
qqq q which satisfy this system we have
∂∂∂ ∂
=++++=
∂∂∂ ∂
0
12
0
12
d d d d ... d 0
s
s
fff f
fq qq q
qqq q
,
hence if =
d0f . Obviously, each integral of the system of equations (22.1.13) allows to
reduce by a unity the number of co-ordinates which determine the position of the repre-
sentative point; as well, if the number of the independent co-ordinates may be reduced due
to the existence of a functional relation =
0f between the co-ordinates
12
, ,...,
s
qq q and
the time
0
q , then the function f is an integral of the system of equations (22.1.13). Hence,
the problem to determine the number of co-ordinates and the number of constraints of a
mechanical system
S is reduced to the problem of finding all the functional independent
integrals of the system (22.2.13). Finally, the system of constraint relations (22.1.13) is
equivalent to
≤mm holonomic constraints and to
−mm
non-holonomic
(non-integrable) constraints; hence, the representative point (the mechanical system
S ) is
specified by
−sm generalized co-ordinates and has −+smm degrees of freedom.
22.1.2.2 Quasi-co-ordinates. Relations of Transposition
The velocity of the representative point corresponding to a given configuration of the
mechanical system
S at a certain moment can be specified by means of the
generalized velocities or by the kinematical characteristics (22.1.4), introduced in Sect.
22.1.1.2, where we take
=
1,2,...,is
. These characteristics are total derivatives with
respect to time only if
∂
∂
∂
−= = =
∂∂ ∂
0
0, , , , 1,2,...,
ij
ik i
ij
jj
k
ijk s
qq q
α
α
α
α
,
(22.1.16)
case in which the generalized co-ordinates can be obtained by a simple integration;
otherwise, the determination of the generalized co-ordinates needs the integration of a
system of linear differential equations, which is – in general – a difficult problem. We
introduce thus the quantities
==
∫
0
d , 1,2,...,
t
ii
ti sπω ,
(22.1.17)
MECHANICAL SYSTEMS, CLASSICAL MODELS
424
which have a certain analogy with the co-ordinates, but are not functions of the position
of the mechanical system
S ; therefore, these quantities are called quasi-co-ordinates
(if
=
ii
qω , then it results =
ii
qπ ) and form a corresponding representative space
′
s
Λ
.
We can write
== + =
0
ddd d,1,2,...,
ii ijji
tq ti sπω α α ,
(22.1.18)
too.
Taking into account (22.1.4'), we also have
=+ =
0
d d d , 1,2,...,
i
kki k
qtksβπ β ,
(22.1.18')
where
=δ =− =
0
0
, , , 1,2,...,
ij i
ki jk k ki
jk sαβ β α β .
(22.1.18'')
By introducing the kinematic characteristics (and the quasi-co-ordinates), we can
identify
m of them with the left member of the constraint relations (22.1.1')
=+ =
0
, 1,2,...,
j
kkj k
aq a k mω
,
(22.1.19)
the last relations being thus written in the form
==0, 1,2,...,
k
kmω .
(22.1.20)
Thus, by using quasi-co-ordinates, one can establish a generalized form of Lagrange’s
equations.
The representative point
P of co-ordinates
12
, ,...,
s
qq qdescribes, during the motion
of the mechanical system
S , a curve
C
, in the space of configurations
s
Λ , while the
point
Π of quasi-co-ordinates
12
, ,...,
s
ππ π describes a curve Γ in an analogous
space
′
s
Λ
of the quasi-co-ordinates; both curves describe – completely – the motion, so
that there is not any difference between the generalized co-ordinates and the
quasi-co-ordinates. However, to any point
P corresponds only one position of the
mechanical system
S , but to a point
Π
can correspond any position of this system.
We notice thus that a correspondence between a point
Π and an arbitrary position of
the mechanical system
S can be established only if, after travelling through a closed
curve
Γ , the mechanical system would return to the same position.
Let be
Δ= =
∫
d , 1,2,...,
ii
C
ti sπω
v
,
(22.1.21)
the variations of the quasi-co-ordinates corresponding to the travelling through a closed
curve
C
by the representative point
P
; we notice thus that to a contour
C
in the space
Dynamics of Non-holonomic Mechanical Systems
425
of configurations
s
Λ corresponds – in general – an open contour Γ in the space of
quasi-co-ordinates
′
s
Λ
, because the kinematic characteristics are not integrable.
Using the virtual generalized displacements, we can write
δ= δ =, 1,2,...,
iijj
qi sπα ,
(22.1.22)
δ= δ =, 1,2,...,
i
kki
qksβπ .
(22.1.22')
Applying the operator
d
to the relations (22.1.22), it results
∂
δ= δ+ δ+ δ
∂
dd d d
ij
iijj jijj
k
k
qqqtq
q
α
πα α ;
as well, by applying the operator
δ to the relations (22.1.18), we get
∂
∂
δ=δ+ δ + δ
∂∂
0
dd d d
ij
i
iijj j
kk
kk
qqq qt
qq
α
α
πα .
Subtracting the two relations one of the other, we can write
()
0
dd dd d d.
ij
ik i
iiijjj jij j
k
jj
k
qq qq qt
qq q
α
α
α
ππα α
∂
∂
∂
⎛⎞⎛⎞
δ−δ = δ−δ + − δ+ − δ
⎜⎟⎜⎟
∂∂ ∂
⎝⎠⎝⎠
Taking into account (22.1.18'), (22.1.22') and denoting
∂
∂
⎛⎞
=− =
⎜⎟
∂∂
⎝⎠
∂
∂
∂
⎛⎞⎛⎞
=− +− =
⎜⎟⎜⎟
∂∂ ∂
⎝⎠⎝⎠
0
0
, , , 1,2,..., ,
, , 1,2,..., ,
ij
ik
i
jm
lm kl
j
k
ij
ik i
i
m
jm ij jm
k
jj
k
ilm s
qq
im s
qq q
α
α
γββ
α
α
α
γββαβ
(22.1.23)
the relations of transposition read
()
d d d d d d , 1,2,..., .
ii
mmm
iiijjj
lm l
qq ti sππα γππγπδ−δ = δ−δ + δ + δ =
(22.1.23)
The permutability relations of the operators
d and δ applied to the generalized
co-ordinates (
δ=δdd
j
j
qq) lead to the relations of transposition (the transitivity
relations of K. Heun)
d d d d , 1,2,...,
ii
mmm
ii
lm l
ti sππγππγπδ−δ = δ + δ = ;
(22.1.24)
in the particular case in which
=
0
0
i
α
(we have
=
0
0
i
β
too) and = 0
ij
α ,
=, 1,2,...,ij s, hence in the case in which the kinematic characteristics do not depend
explicitly on time, we obtain
= 0
i
m
γ , while the relations (22.1.24) read
MECHANICAL SYSTEMS, CLASSICAL MODELS
426
d d d , 1,2,..., .
i
m
ii
lm l
isππγππδ−δ = δ =
(22.1.24')
The obvious relations
, (!) 0, , , 1,2,..., ,
iii
lm ml ll
ilm sγγγ=− = =
(22.1.23'')
take place. Replacing in (22.1.24') the symbol of variation
δ by the differential d , it
results
==d d 0, 1,2,...,
i
m
lm l
isγππ ,
(22.1.25)
putting thus in evidence the gyroscopic nature of the non-holonomic terms in the
equations of a non-holonomic mechanical system. We mention that the relations
(22.1.24) and (22.1.24') allow to determine, easily, the coefficients
i
lm
γ and
i
m
γ .
As an example of kinematic characteristics frequently used, we mention the
components of the angular velocity
ω of a rigid solid along the principal axes of
inertia, expressed by means of Euler’s angles (generalized co-ordinates) and by means
of their derivatives with respect to time (generalized velocities), given by the relations
(5.2.35). The variations (22.1.21) of the quasi-co-ordinates are
()
()
()
Δ= = +
Δ= = − +
Δ= = +
∫∫
∫∫
∫∫
11
22
33
dcosdsinsind,
d sin d sin cos d ,
ddcosd;
CC
CC
CC
t
t
t
πω ϕθθϕψ
πω ϕθθϕψ
πω ϕθψ
vv
vv
vv
(22.1.26)
we get thus
()
()
()
()
()
()
()
()
()( )
Δ=δ−δ =δ −δ
+δ − δ +δ − δ
Δ=δ−δ =δ −δ
+δ − δ + δ − δ
Δ=δ−δ =δ −δ
11
22
33
dd d d sincos
dd cossin dd sin,
dd d d sinsin
dd coscos dd cos,
dd d d sin.
ππϕψψϕθϕ
θψ θψ θ ϕ θϕ θϕ ϕ
ππψϕψϕθϕ
θψ θψ θ ϕ θϕ θϕ ϕ
ππψθψθθ
(22.1.26')
Corresponding to the relation (5.2.35), we will have (
123
, , qqqψθϕ===
;
0
0, 1,2,3
i
iα ==
)
===
==−=
===
11 12 13
21 22 23
31 32 33
sinsin,cos,0,
sin cos , sin , 0,
cos , 0, 1;
α θ ϕα ϕα
αθϕα ϕα
αθαα
as well, the relations (14.1.15) allow to write (
0
0, 1,2, 3
k
kβ ==)

Dynamics of Non-holonomic Mechanical Systems
427
11 12 13
21 22 23
31 32 33
sin cosec , cos cosec , 0,
cos , sin , 0,
sin cot , cos cot , 1.
βϕθβ ϕθβ
βϕβ ϕβ
βϕθβ ϕθβ
===
==−=
=− =− =
The first formula (22.1.23) leads to =∈
i
lm iml
γ , where ∈
iml
is Ricci’s symbol (2.1.29).
In case of a regular precession, defined by
00 0000
, , , , , constmt mtψψθθϕϕψθϕ=+ = =+ = ,
(22.1.27)
the trajectory of the representative point in the space of configuration is a straight line
in the plane
=
0
θθ
. In the space of quasi-co-ordinates we have
()
[]
()
[]
()
=− + −
=− + −
=+
000
1
000
2
0
3
sin cos cos ,
sin sin sin ,
cos ,
m
nt
n
m
nt
n
mnt
πθ ϕϕ
πθϕϕ
πθ
(22.1.27')
the trajectory of the point
Π
being a spiral on a circular cylinder; this last
representation is useful for the study of the motion of the angular velocity vector
ω .
22.1.2.3 Non-holonomic Spaces. Vrănceanu’s Theorems
Being situated in the space of configurations
s
Λ , let be a holonomic and catastatic
(hence, scleronomic) mechanical system, for which the kinetic energy is of the form
=
1
()
2
ij i j
Tgqqq;
(22.1.28)
we organize this space as a Riemannian space, defined by the element of arc
=
2
d()dd
ij i j
sgqqq.
(22.1.28')
Corresponding to the Theorem 20.1.12 of Jacobi (see Sect. 22.1.4.2), being given a
discrete mechanical system
S , subjected to holonomic and scleronomic ideal
constraints, acted upon by no one force, the trajectory of the point
P in the space
s
Λ ,
endowed with the metrics (22.1.28'), is a geodesic of this space.
Let be
, 1,2,...,
j
vj s= , the components of a vector with the origin at the point P ,
in the space
s
Λ . The formulae
⎧⎫
⎪⎪
=− =
⎨⎬
⎪⎪
⎩⎭
d d , 1,2,...,
j
kl
j
vvqjs
kl
.
(22.1.29)
where one uses Christoffel’s symbol of the second kind, define the parallel
displacement in Levi-Civita’s sense of the vector (of components)
j
v with the origin at

MECHANICAL SYSTEMS, CLASSICAL MODELS
428
the point (
12
, ,...,
s
qq q), the vector displaced being + d
j
j
vv with the origin at the
point (
++ +
1122
d , d ,..., d
ss
qqqqqq). In this case, the geodesics of the space
s
Λ
are
the curves along which the tangent vector is displaced by parallelism; these curves are
called autoparallel curves too. We can state
Theorem 22.1.1 The trajectory of the representative point P in the space
s
Λ
,
endowed with the metrics (22.2.28'), corresponding to the motion of a discrete
mechanical system
S , subjected to holonomic and scleronomic, ideal constraints and
acted by no one force is an autoparallel curve of this space.
One obtains thus a generalization of the principle of inertia, the straight lines in the
space
3
E being just its autoparallel curves.
Let us consider now, in the Riemannian space
s
Λ , a Pfaff system
===d d 0, 1,2,...,
k
jj
k
sqk sλ
;
(22.1.30)
one defines thus a system of orthogonal congruencies if the relations
=
kk
ij ij
gλλ
(22.1.30')
are satisfied. In this case
()()
()
=+++
22
2
21 2
d d d ... d
s
ss s s,
(22.1.31)
the metrics of the space
s
Λ being thus expressed in the form of a sum of squares.
Solving the system (22.1.30) with respect to
d
j
q , we obtain
==d d , 1,2,...,
j
k
j
k
qsj sμ ,
(22.1.32)
where
j
k
μ is the normalized algebraic complement of the element
k
j
λ , so that
=δ
ki i
j
j
k
λμ . The system of congruencies is thus definite by the differential system
=== =
12
s
12
k
kk
dd
d
... , 1,2,...,
s
qq
q
ks
μ
μμ
,
(22.1.33)
through each point of
s
Λ passing one curve of each of the s families;
12
, ,...,
s
kk k
μμ μ
are the components of the tangent vector at a point of the corresponding curve which
passes through that point. Multiplying both members of the relation (22.1.30') by
j
i
k
l
μμ
and summing, we get
=δ
j
i
ij
kkl
l
g μμ ;
(22.1.34)
hence, the vectors
{
}
12
, ,...,
kk k
s
μμ μ
are unitary and orthogonal two by two.
Dynamics of Non-holonomic Mechanical Systems
429
Being given a vector
=,1,2,...,
i
Vi s, in
s
Λ , by Levi-Civita’s parallel displacement
one obtains the vector
+ d
ii
VV, with
⎧⎫
⎪⎪
=− =
⎨⎬
⎪⎪
⎩⎭
ddd
i
ijj
kjkk
j
VVqVq
kl
γ ,
(22.1.35)
where
l
l
j
m
iimninimnmn
jjj
j
klklk lkk
mn
ll
mn mn
qq
μ
λ
γλμμλμλμμμμ
∂
⎧⎫ ⎧⎫
∂
=− − =− +
⎨⎬ ⎨⎬
∂∂
⎩⎭ ⎩⎭
(22.1.35')
are Ricci’s coefficients of rotation.
We assume that, in
s
Λ , one gives a Pfaff’s system
=== =
12
d d ... d 0
m
ss s ,
(22.1.36)
which is not integrable; this system defines a non-holonomic space
−sm
s
Λ . A
displacement
d
j
q is called interior to this space if
==dd0
jj
sq
αα
μ
for
= 1,2,...,mα ; more general, a vector is called interior to the non-holonomic space
−sm
s
Λ if its components , 1,2,...,Vm
α
α = , are all equal to zero. In this space too we
introduce a parallel displacement characterized by the formulae (22.1.35), (22.1.35'),
stating (Vrănceanu, Gh., 1936)
Theorem 22.1.2 (Gh. Vrănceanu). To a non-holonomic space
−sm
s
Λ
, defined by the
metrics (22.1.28') and by the equations (22.1.36), one can univocally associate a
parallel displacement of the interior vectors, along the interior paths, maintaining the
lengths.
Let be the vectors
==
d
, 1,2,...,
d
j
i
ij
q
uis
t
λ ,
(22.1.37)
with
0, 1,2,...,um
α
α== ; we can write
=+
==
∑
1
d
,1,2,...,
d
s
j
j
k
k
km
q
uj s
t
μ ,
(22.1.37')
where
k
u are the components of the vector tangent to the curve on the congruencies
{
}
i
j
λ .
The curve is autoparallel if the relations
=dd
ik
ij
jk
uusγ hold for = d/d
i
i
ust; hence,
the autoparallel curves in the space
−sm
s
Λ verify the equations
=+
==++
∑
,1
d
, 1, 2,...,
d
s
i
i
j
jk k
jk m
u
uu i m m s
t
γ .
(22.1.38)
MECHANICAL SYSTEMS, CLASSICAL MODELS
430
We obtain thus a differential system (22.1.37'), (22.1.38) of the first order of
−2sm
equations with
−2sm unknown functions , 1,2,...,
j
qj s= , and , 1,
i
ui m=+
+ 2,...,ms
. A curve is definite if a point and a vector interior to the space
−sm
s
Λ are
given. If the equations (22.1.36) represent the constraints of a non-holonomic
mechanical system
S , then the equations (22.1.37'), (22.1.38) are equivalent to
Lagrange’s equations in the quasi-co-ordinates
d
i
s , which define the trajectories in the
absence of the given forces. We can thus state
Theorem 22.1.3 (Gh. Vrănceanu). The trajectory of the representative point P in the
space
−sm
s
Λ defined by the metrics (22.1.28') and the conditions (22.1.36),
corresponding to the motion of a discrete mechanical system
S subjected to
non-holonomic and catastatic ideal constraints, non-acted upon by given forces, is an
autoparallel curve of this space.
22.2 Lagrange’s Equations. Other Equations of Motion
We considered, in Sect. 17.1.2, the motion of a rigid solid which slides without
friction on a fixed plane, in particular the motion of a heavy homogeneous rigid solid of
rotation, of a heavy gyroscope or of a cylindrical homogeneous rigid solid; as well, the
motion without sliding of a sphere on a fixed plane, in particular that of a heavy
homogeneous one on a fixed horizontal plane, has been considered. We mention also
the results concerning the motion without sliding of a heavy circular disc on a fixed
horizontal plane. These problems have been studied by means of the Newtonian
equations of classical mechanics. In this order of ideas we consider the motion of an
arbitrary rigid solid on a fixed surface too.
After introducing Lagrange’s equations, one studies the above mentioned problems
in the frame of Lagrangian mechanics. One presents then some other equations of
motion.
22.2.1 Motion of a Rigid Solid on a Fixed Surface
In what follows, we study first of all the motion of a rigid solid on a fixed horizontal
plane, using Newtonian equations of classical mechanics; as well, we consider the
motion of a sphere on a perfect rough fixed surface. In what concerns the kinematics of
motion, we use the results obtained in Sect. 22.1.1.3.
22.2.1.1 Motion of a Rigid Solid on a Fixed Horizontal Plane
Let be a rigid solid which moves on a horizontal plane
Π
, with support at three
points. Two of the supports slide freely (without friction) on a plane, while the third one
is a knife edge (a small wheel with a sharpened rim), rigidly connected to the solid in
motion; one assumes that the contact point
O
of the knife can move freely in the plane
Π
along it, but not along a normal to its direction. This problem has been studied in
1911 by Chaplygin and solved by quadratures; therefore it will be called Chaplygin’s
problem. Later, it was considered in detail, in a particular case, by Carathéodory, in
1933, the respective mechanical system being called a sleigh. Other results are due to
Wagner.
Dynamics of Non-holonomic Mechanical Systems
431
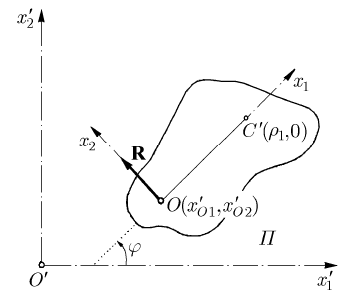
We consider the fixed frame of reference
′′′
12
Oxx and the movable frame of reference
12
Ox x , rigidly connected to the sleigh in the plane Π ; the
1
Ox -axis is along the
direction of the knife, the point
O
being the theoretical point of contact. The position
of the movable frame is specified by the co-ordinates
′′
12
,
OO
xx of the point O and by
the angle
ϕ made by the
1
Ox
-axis with the
′′
1
Ox -axis (Fig. 22.10); thus, the problem is
reduced to the determination of the functions
(), 1,2
Ok Ok
xxtk
′′
==, and = ()tϕϕ .
But it is more convenient to choose as unknowns the components
′
1O
v and
′
2O
v of the
velocity along the axes of the movable frame of reference, as well as the angular
velocity of rotation
=ωϕ of the rigid solid about a vertical axis. We denote by
C
I the
moment of inertia of the rigid solid with respect to a vertical axis which passes through
the mass centre
C (of position vector
ρ
with respect to O ) of the rigid solid of mass
M . The constraint force R , applied at O , is directed along the
2
Ox -axis. For the sake
of simplicity, we assume that
=
2
0ρ , the centre of mass being projected at the point
′
1
(,)COρ , on the
′′
1
Ox -axis.
Fig. 22.10 Motion of a rigid solid with supports at three points
The theorem of momentum (14.1.60) reads
()
[
]
′′
+× +×+× × =
vv R
OO
M
ωω
ρ
ωω
ρ
.
(22.2.1)
We have (
== =
12 3
0,ωω ωω)
()
′′
−−=
′′
++ =
2
1
12
1
22
0,
,
OO
OO
vv
Mv v R
ωωρ
ωρ
(22.2.1')
in projection on the axes of the movable frame. As well, the theorem of moment of
momentum with respect to a vertical axis passing through
C
leads to
=−
1
C
IRωρ
.
(22.2.2)