Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
432
We must have
′
=
2
0
O
v , because the point O is moving along the axis
1
Ox ; it results
the constraint force
()
′
=+
1
1
O
RMvωωρ
.
(22.2.3)
Taking into account (22.2.2) and denoting
=+
2
2
1
1
C
I
k
Mρ
,
(22.2.4)
we can write the equations of motion in the form
′′
=+=
22
11
11
,0
OO
vvk
ω
ωρ ρ
ω
;
eliminating the velocity
′
1O
v , we get
+=
22
d
0
d
k
t
ω
ω
ω
.
Multiplying by
/ωω
and integrating, it results the differential equation of first order
(
)
+=
2
2222
kkC
ω
ω
ω
,
(22.2.5)
where
C is an integration constant.
By a change of variable
⎡
⎤
=∈−
⎣
⎦
cos , ,
22
kC
ππ
ωψψ
,
(22.2.5')
it results
=
222
cosCψψ
; we choose the sign of the constant C in (22.2.5) so as to
have
= cosCψψ
. Hence, we can write
+
==
−
∫
0
d11sin
ln
cos 2 1 sin
Ct
ψ
αψ
αψ
and then
−
−−
−
== ==
++
21
sin tanh , cos
cosh
Ct Ct
Ct Ct Ct Ct
ee
Ct
Ct
ee ee
ψψ
;
it results that
∈−∞∞[,]t , because ∈−[/2,/2]ψππ, the change of variable (22.2.5')
covering the whole interval of time. Finally, we obtain
= kωψ
, wherefrom – by
integration and by a convenient determination of the integration constant – we get
= kϕψ;
hence, the sleigh is rotating by the angle
kπ for a variation of the time t from −∞ to ∞ .
Finally,
Dynamics of Non-holonomic Mechanical Systems
433
()
= arcsin tanhkCtϕ .
(22.2.6)
Starting from
′
=− = =
22 2
11 1
1
tan sin
O
vk k Ck
ω
ρρψψ ρψ
ω
and from
′′ ′′
==
11 21
cos , sin
OO OO
xv xvϕϕ
and observing that
dd/cos, /tC kψψψϕ==, we can write the equations of motion
of the point
O with respect to the fixed frame in the form
′′
=+
′′
=+
∫
∫
02
1
11
0
02
1
22
0
tan cos d ,
tan sin d .
OO
OO
xxk k
xxk k
ψ
ψ
ρψψψ
ρψψψ
(22.2.7)
We can determine thus the trajectory of the point
O in the plane Π for various values
of the parameter
k ; but we notice that for =
1
0ρ (the projection of the mass centre C on
the plane
Π coincides with the contact point O of the knife with this plane) we have
=∞k , so that the equation of motion can no more be written in the form (22.2.5). The
equations (22.2.1'), (22.2.2) lead to
= constω ,
′
=
1
const
O
v ; hence, the point O has a
uniform motion in a direction which is rotating with a constant angular velocity, describing
thus a circle of radius
′
=
1
/
O
rvω .
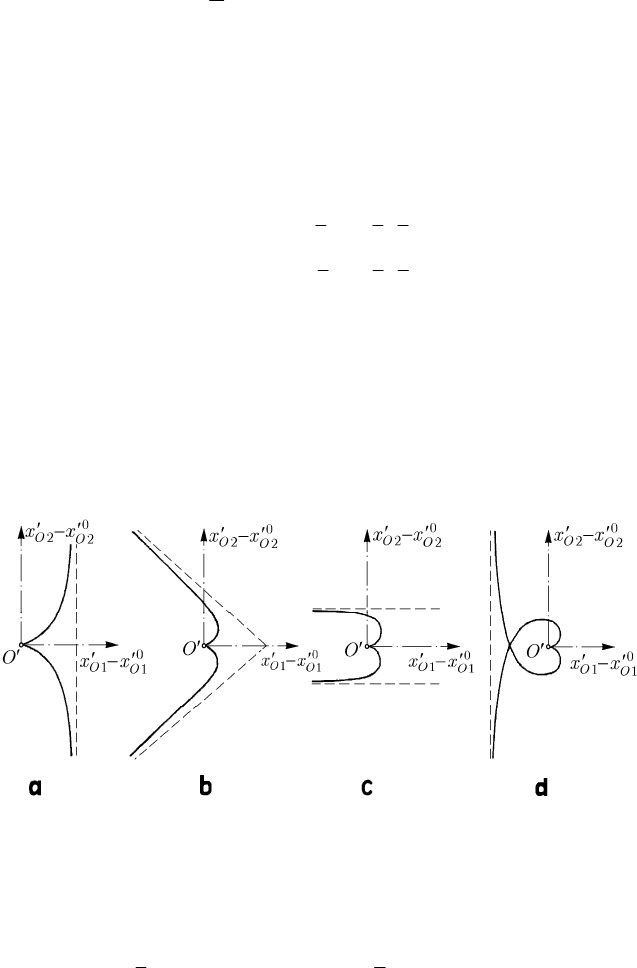
Fig. 22.11 Trajectories of the contact point of the knife edge in the motion
of a rigid solid on a horizontal plane
If
≠
1
0ρ , then the trajectory (22.2.7) has only a single point for = 0ψ ; to determine
the nature of the singularity, we consider expansions of the form
′′ ′′
−= + −= +
022 0 33
11
11 22
11
..., ...
23
OO OO
xx k xx kρψ ρψ ,
(22.2.7')
MECHANICAL SYSTEMS, CLASSICAL MODELS
434
which put in evidence the cuspidal point for
= 0ψ . The straight line
′′
=
0
22
OO
xx is a
symmetry axis of this curve; observing that
21
d/d tan
OO
xx kψ
′′
= and that
(
)
→
−=<∞
∫
2
1
0
/2
lim tan sin d
2
kk
ψ
ψπ
π
ρψψψα
,
we can state that
′′
=+
21
tan
2
OO
xx k
π
α
is an asymptote of the considered trajectory. The trajectories of the point
O for = 1k ,
= 3/2k , = 2k and = 3k are represented in Fig 22.11a–d, respectively; the point O
stops at the cuspidal point, at which the velocity vanishes.
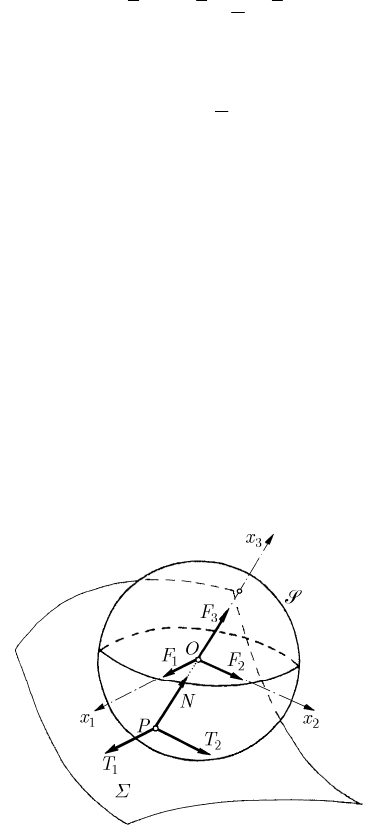
22.2.1.2 Motion of a Sphere on a Rough Fixed Surface
Let us consider a homogeneous sphere S of mass M , acted upon by forces the
resultant of which passes through the centre
O ; we assume that the sphere rolls on a
perfect rough surface
Σ . We use a movable frame of reference R of co-ordinate axes
123
Ox x x , so that
3
Ox passes through the contact point P between the sphere and the
surface
Σ . Let Ω and
ω
be the instantaneous angular velocities of the movable frame
and of the sphere, respectively, v
12
(,,0)vv be the velocity of the point O with respect
to a fixed frame and
F and R
12
(,,)TT N be the resultants of the given forces, applied
at
O , and of the constraint forces, applied at P , respectively (Fig. 22.12). The
components of these quantities are taken along the axes of the frame of reference
R .
Fig. 22.12 Motion of a sphere on a rough fixed surface
The equations of motion read
()
()
()
−=+
−=+
−=+
132 11
231 22
12 21 3
,
,
,
Mv v F T
Mv v F T
Mv v FN
Ω
Ω
ΩΩ
(22.2.8)
Dynamics of Non-holonomic Mechanical Systems
435
()
()
−+ =
−+ =−
−+=
13223 2
21331 1
32112
,
,
0,
ITr
ITr
ωΩωΩω
ωΩωΩω
ωΩωΩω
(22.2.8')
where
I
is the moment of inertia of the sphere with respect to a diameter of it; the
conditions of rolling without sliding are given by
12 21
0, 0vr vrωω−= +=.
(22.2.9)
Eliminating the constraint forces
1
T and
2
T and the angular velocities
1
ω and
2
ω , it
results
−= +
++
+= +
++
2
132 1 13
22
2
231 2 23
22
,
.
rI
vv F r
IMr IMr
rI
vv F r
IMr IMr
ΩΩω
ΩΩω
(22.2.10)
These equations put in evidence the motion of the centre
O of the sphere, the trajectory
of which is on the surface
′
Σ
, formed by the extremities of the normals, of length r ,
to the surface
Σ ; the point O is acted upon by the given forces, reduced in the ratio
+
22
/( )Mr I Mr , and by the forces
⎡⎤⎡⎤
+−
⎢⎥⎢⎥
⎣⎦⎣⎦
++
13 32 23 31
22
,
II
MrvMrv
IMr IMr
Ωω Ω Ωω Ω ,
respectively. We choose the axes
1
Ox and
2
Ox along the lines of curvature of the
surface
′
Σ
, of radii of curvature of the normal sections to the surface
1
ρ and
2
ρ ,
respectively; in this case
==
21
12
21
,
vv
ΩΩ
ρρ
.
(22.2.11)
Meusnier’s theorem (4.1.19) leads to
=+
12
312
12
tan tan
vv
Ωθθ
ρρ
.
(22.2.11')
Taking into account the third equation (22.2.8'), it results
⎛⎞
=−
⎜⎟
⎝⎠
12
3
21
11
vv
r
ω
ρρ
.
(22.2.11'')
Let
′′′
123
,,
OOO
xxx be the co-ordinates of the point O ; the velocities
1
v and
2
v can
be obtained, in this case, starting from the equation of the surface, as functions of

MECHANICAL SYSTEMS, CLASSICAL MODELS
436
′′′
123
,,
OOO
xxx, by decomposing the velocity along the axes of the frame of reference
R . Eliminating the quantities
12 1 2
,, ,vvΩΩ and
3
Ω by means of the relations
(22.2.10), (22.2.11), and (22.2.11'), we obtain three equations for the unknowns
123
,,ΩΩΩ and
3
ω and their derivatives with respect to time; together with the
equation of the surface
′
Σ
, we have thus at our disposal a system of four equations,
sufficient to specify the motion of the sphere.
Obviously, in various particular cases one obtains important simplifications of
calculation. For instance, in case of the rolling of a sphere on a plane we have
==
12
0ΩΩ
and, assuming that the frame of reference R is chosen so that
=
3
0Ω
,
it results
==
++
22
1122
22
,
rr
vFvF
IMr IMr
.
(22.2.12)
Thus, the motion of the mass centre of the sphere does not depend on the component
3
ω
of the angular velocity
ω
, which is constant. As a matter of fact, this problem has
been considered in Sect. 17.1.2.7 too. Other interesting particular cases are these in
which the surface
Σ
is a sphere, a cylinder or a cone or – more general – a surface of
rotation.
22.2.2 Lagrange’s Equations
In what follows, we take again the equations with multipliers of Lagrange; as well,
we establish Lagrange’s equations in quasi-co-ordinates.
22.2.2.1 Lagrange’s Equations with Multipliers
In the frame of Lagrangian mechanics, one can make a systematic study of the
motion of a non-holonomic mechanical system by means of Lagrange’s equations with
multipliers (see Sect. 18.2.2.2)
=
∂∂
⎛⎞
−=+ =
⎜⎟
∂∂
⎝⎠
∑
1
d
,1,2,...,
d
m
kkj
jj
k
TT
Qaj s
tq q
λ
,
(22.2.13)
where the last sums correspond to the components
=, 1,2,...,
j
Rj s, of the constraint
generalized force, a study in this direction being made by Ed. Routh. To determine the
+sm unknowns (the functions ( ), 1,2,...,
jj
qqtj s==, and the parameters
k
λ ,
= 1,2,...,km), we use the s Lagrange’s equations with multipliers and the <ms
non-holonomic constraint relations (18.2.9'), which can be – conveniently – written in the
form
0
, 1,2,...,
j
kj k
aq a k m=− = .
(22.2.14)
Applying the methodology in Sect. 18.2.3.4 to the equations (22.2.13), one obtains
the relation

Dynamics of Non-holonomic Mechanical Systems
437
()
−= + −
0
2
d
d
jj jj
TT Qq RqT
t
,
(22.2.15)
analogue to the relation (18.2.60'). We notice that
==
==−
∑∑
0
11
mm
jj j
kkj kk
kk
Rq a q aλλ ,
(22.2.16)
where we took into account (22.2.14). Hence, in case of catastatic constraints
(
=
0
0
k
a ,
= 1,2,...,ks
) we have = 0
jj
Rq , so that the relation (22.2.15) is reduced
to the relation (18.2.60'). We can thus state that, in case of non-holonomic and catastatic
constraints, one obtains a first integral of Painlevé of the form (18.2.61), in the same
conditions in which this is obtained in case of holonomic (in general, non-catastatic)
constraints.
As well, in case of a non-holonomic and catastatic mechanical system, for which the
generalized forces are quasi-conservative, assuming a simple quasi-potential in the form
(18.2.20), we can introduce the kinetic potential (18.2.34), obtaining the relation
(18.2.62); if the kinetic potential
L does not depend explicitly on time ( = 0
L
), we
find again Jacobi’s first integral (18.2.63). Obviously, in the condition of some
catastatic constraints (and only in such a condition) one can obtain all types of first
integrals mentioned in Sect. 18.2.3.4 (e.g., a first integral of Jacobi type).
But we must notice that this method of calculation is not completely satisfactory.
Indeed, because the generalized co-ordinates are not independent, one must take into
account the
m constraint relations (22.2.14). But these relations contain generalized
velocities, so that we cannot express
m dependent generalized co-ordinates as
functions of
−nm independent generalized co-ordinates ; one cannot thus eliminate
these co-ordinates between the respective relations and the equations (22.2.13). To
realize this and to remove Lagrange’s multipliers from the equations of motion, one can
introduce quasi-co-ordinates instead of generalized co-ordinates.
22.2.2.2 Lagrange’s Equations in Quasi-co-ordinates
We have introduced in Sect. 22.1.2.2 the quasi-co-ordinates by the relations
(22.1.17) or (22.1.18) or by the relations (22.1.18') or (22.1.18''), for which one can
write the relations of transposition (22.1.24). As one can see, the quasi-co-ordinates
allow a generalization of Lagrange’s equations, by unifying their form in case of
non-holonomic systems. To put in evidence the importance of this generalization, from
the practical as well as from the formal point of view, it is sufficient to mention that the
choice of convenient unknown parameters (generalized co-ordinates and
quasi-co-ordinates which determine the motion) plays a very important rôle in the study
of some particular mechanical problems. We mention thus the problem of motion of the
rigid solid with a fixed point, which has been formulated and studied by Euler in
quasi-co-ordinates, although he did not use this motion. One can mention also other
researches where the velocities of the points of a mechanical system in motion have
been put in evidence (e.g., the non-holonomic problem of rolling of a
non-homogeneous sphere on a plane, considered by Chaplygin), using the
quasi-co-ordinates. But only at the beginning of last century the generalized
co-ordinates and the kinematic characteristics have lead to a unified concept, that of
MECHANICAL SYSTEMS, CLASSICAL MODELS
438
quasi-co-ordinates. In 1904, G. Hamel has deduced Lagrange’s equations in
quasi-co-ordinates (which he called Lagrange–Euler equations), applicable to
holonomic as well as to non-holonomic mechanical systems.
Let be a mechanical system
S definite by the generalized co-ordinates
j
q and by
the quasi-co-ordinates
, 1,2,...,
j
jsπ = , linked by the relations (22.1.18) or (22.1.18'),
where we make
=
0
0
i
α , hence
0
0, , 1,2,...,
k
ik sβ == (catastatic case) too; we
can write
, , , , , 1,2,...,
iijjj ij
jk k jk ik
qq ijk sπα βπαβ== =δ= ,
(22.2.17)
where
12 12
( , ,..., ), ( , ,..., ), , , 1,2,...,
ss
ij ij
jk jk
qq q qq q ijk sαα β β== =. Observing
that the relation
=∂ ∂ =d(/)d d
iijjijj
qq qππ α
leads to
∂∂=/
ij ij
qπα
and that
analogously we have
∂∂=/
j
kjk
q πβ, we obtain
∂∂
∂∂
== == =
∂∂ ∂∂
, , , , 1,2,...,
jj
ii
ij
jk
jj
kk
qq
ijk s
qq
ππ
αβ
ππ
.
(22.2.18)
Thus, for any function
=
12
( , ,..., ; )
s
ffqq qt or =
12
(,,...,;)
s
ggqq qt , the relations
∂
∂∂ ∂∂ ∂
== = =
∂∂∂∂∂∂
, , 1,2,...,
j
jk jk
jj j
kk k
q
ff fg g
ks
qq q
ββ
ππ π
,
(22.2.19)
take place; as well, for any function
=
12
( , ,..., ; )
s
ff tππ π or =
12
( , ,..., ; )
s
gg tππ π
we have
∂∂∂∂
===
∂∂∂∂
, , 1,2,...,
ij ij
jjjj
ffgf
js
qq
αα
ππ
.
(22.2.19')
Taking into account (22.1.22'), we can write the relation (18.2.27'), corresponding to
the application of the principle of the virtual work (which led us to Lagrange’s
equations (18.2.29) for holonomic constraints), in the form
∂∂
⎡⎛ ⎞ ⎤
−− δ=
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
d
0
d
j
jk k
jj
TT
Q
tq q
βπ
;
because the variations
δ
k
π of the quasi-co-ordinates are arbitrary, it results
∂∂
⎡⎛ ⎞ ⎤
−− ==
⎜⎟
⎢⎥
∂∂
⎣⎝ ⎠ ⎦
d
0, 1,2,...,
d
j
jk
jj
TT
Qks
tq q
β
.
(22.2.20)
If we denote by
*
T the function which is obtained by replacing in T the
generalized velocities
j
q by the quasi-velocities
k
π , we have
Dynamics of Non-holonomic Mechanical Systems
439
=
==
12 12 12
12
**
12 1 2 12 1 2
( , ,..., ; , ,..., ) ( , ,..., ; , ,..., )
( , ,..., ; , ,..., ) ( , ,..., ; , ,..., ).
ss s
kk kk skk
ss s
jjsjj
jj
Tqq qqq q Tqq q
Tqq q Tqq q q q q
βπβπ βπ
ππ π α α α
Starting from here and using the relations (22.2.17), (22.2.18), (22.2.18’), and
(22.2.19'), we can write
∂
∂
⎛⎞∂∂∂ ∂∂
⎛⎞ ⎛ ⎞
=−=+
⎜⎟
⎜⎟ ⎜ ⎟
∂∂∂∂∂∂∂
⎝⎠ ⎝ ⎠
⎝⎠
∂∂
⎛⎞
∂∂∂ ∂∂
=+ =+
⎜⎟
∂∂∂∂∂∂∂
⎝⎠
**
** **
dd d
,
dd d
;
jk ij
i
jk jk jk ml l
m
jjji i
k
im im
m
jk jk jk ml l
j j ij ij
k
TTT TT
q
tq t q qq t q
TTT TT
q
qqq q
β
α
ββ ββπ
ππ
αα
ββ ββπ
πππ
replacing in (22.2.20), it results
∂
∂
⎛⎞∂∂ ∂
⎛⎞
−+ − =
⎜⎟
⎜⎟
∂∂ ∂∂∂
⎝⎠
⎝⎠
** *
d
d
ij
im
j
j
kml l jk
m
ji
kk
TT T
Q
tqq
α
α
ββ π β
ππ π
.
Introducing the generalized forces
==
*
,1,2,...,
j
kjk
QQ k sβ
,
(22.2.21)
corresponding to the virtual variations
δ
k
π , and using the notations (22.1.23), we get
the equations
⎛⎞∂∂ ∂
−+ =
⎜⎟
∂∂ ∂
⎝⎠
** *
*
d
d
j
lk
lk
i
kk
TT T
Q
t
γπ
ππ π
,
which we rewrite in the form
⎛⎞
∂∂ ∂
−+ = =
⎜⎟
∂∂ ∂
⎝⎠
** *
*
d
, 1,2,...,
d
j
kk
kj
jj i
TT T
Qj s
t
γπ
ππ π
;
(22.2.22)
by analogy with Lagrange’s equations (18.2.29), we have thus obtained Lagrange’s
equations in quasi-co-ordinates, in catastatic, hence scleronomic case (Hamel’s
equations).
One can show that, in the general non-holonomic and rheonomous case, the
equations (22.2.22) are completed in the form
⎛⎞
∂∂ ∂ ∂
−+ + =+ =
⎜⎟
∂∂ ∂ ∂
⎝⎠
** * *
**
d
,1,2,..,
d
ii
jj
kj k k
jj i i
TT T T
QRj s
t
γπγ
ππ π π
,
(22.2.22')
where, starting from the constraint generalized forces
j
R (see Sect. 22.2.2.1), we
introduce also the generalized forces
==
*
, 1,2,...,
j
kjk
RR k sβ ,
(22.2.21')
MECHANICAL SYSTEMS, CLASSICAL MODELS
440
the coefficients
i
j
γ being given by (22.2.23); these are the Boltzmann–Hamel equations.
As well, the quantities
∂
==
∂
*
*
, 1,2,...,
j
j
T
pjs
π
,
(22.2.23)
are the quasi-momenta corresponding to the quasi-co-ordinates. If a virtual variation
12 1 1
... 0, 0, ... 0
s
j
jj
πππππ π
−+
δ=δ==δ = δ≠ δ ==δ= corresponds to a
rotation about an instantaneous axis of rotation, then the generalized forces
*
j
Q and the
quasi-momenta
*
j
p are, as usual, the moment of the force and the moment of
momentum, respectively, with respect to the axis.
If
12
, ,...,
s
ππ π are generalized co-ordinates (true co-ordinates), then the relations of
momentum (22.2.17) are integrable, so that the coefficients
i
kj
γ
vanish, while the
equations (22.2.22) become the equations (18.2.29) of Lagrange.
The expression (18.2.15), (18.2.15'), (18.2.15'') and (18.2.15''') of the kinetic energy
allows to write
*
T in the form (in holonomic and catastatic, hence scleronomic case)
=
**
1
2
ij i j
Tgππ
,
(22.2.24)
where we have introduced the notations
==
**
ij ji
kl ki lj
gg gββ ,
(22.2.25)
by means of the relations (22.2.17). We calculate thus
∂∂=
**
/
j
ij i
Tgππ, and then
∂
⎛⎞∂
=+
⎜⎟
∂∂
⎝⎠
∂
∂
=
∂∂
*
*
*
*
*
d
,
d
1
;
2
jk
j
kk kl
j
l
kl
kl
jj
g
T
g
t
g
T
πππ
ππ
ππ
ππ
observing that the product
kl
ππ is symmetric with respect to the indices k and l , it
results
⎛⎞
∂∂∂
=+
⎜⎟
⎜⎟
∂∂∂
⎝⎠
***
1
2
jk jk jl
kl kl
llk
ggg
ππ ππ
πππ
,
so that we can write the equations (22.2.22) in the form (we introduce the generalized
forces
*
j
R , corresponding to a scleronomic and non-holonomic mechanical system)
[]
()
++ =+=
****
, , 1,2,...,
i
jj
jk k kj li k l
gkljg QRj sπγππ ,
(22.2.26)
Dynamics of Non-holonomic Mechanical Systems
441
where we have introduced Christoffel’s symbols of first kind
[]
⎛⎞
∂∂
∂
=+− =
⎜⎟
⎜⎟
∂∂∂
⎝⎠
**
*
1
, , , , 1,2,...,
2
jk jl
kl
j
lk
gg
g
kl j j k l s
πππ
.
(22.2.27)
We have thus obtained a system of
s linear equations in the quasi-velocities
, 1,2,...,
k
ksπ = .
Let
=
**
j
kkj
gg be the algebraic complement of the element
*
j
k
g in the determinant
⎡
⎤
=
⎣
⎦
**
det
j
k
gg
; the normalized algebraic complement will be ==
****
/
jk kj jk
gggg.
We notice that the relations
⎡⎤
==δ
⎣⎦
***
*
1
det ,
j
kmjm
j
kk
ggg
g
,
(22.2.28)
where
δ
m
k
is Kronecker’s symbol, take place. Multiplying the system of equations
(22.2.26) by
*mj
g and summing with respect to j , it results (we replace then the free
index
m by
j
)
⎛⎧ ⎫ ⎞
⎪⎪
++ =+=
⎜⎟
⎨⎬
⎜⎟
⎪⎪
⎝⎩ ⎭ ⎠
**
, 1,2,...,
j
jjj
kl
kl
j
QRj s
kl
πγππ
,
(22.2.29)
where we have introduced Christoffel’s symbols of second kind, definite by
[]
⎧⎫
⎪⎪
==
⎨⎬
⎪⎪
⎩⎭
*
, , , , 1,2,...,
mj
j
kl m g j k l s
kl
,
(22.2.27')
as well as the notations
==
**
, , , 1,2,...,
mi mj
kl kj li
gg mkl sγγ ,
(22.2.30)
===
******
, , 1,2,...,
mj mj
mm
jj
QQgRRgm s.
(22.2.30')
The system of equations (22.2.29) represents thus the normal form of Hamel’s
equations, in which the quasi-accelerations are expressed as functions of
quasi-velocities and quasi-co-ordinates; this form of the equations (analogue to the form
(18.2.47') of Lagrange’s equations) can be always obtained, because
≠
*
0g .
In case of a non-holonomic mechanical system with
<ms catastatic constraints of
the form
−+
==
,
0, 2,...,
j
smkj
aqk m ,
(22.2.31)
hence with
−sm degrees of freedom, it is often convenient to use quasi-co-ordinates,
so that
m quasi-co-ordinates (in case of the notations used above, these