Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
412
22.1.1.1 Preliminary Notions
In the study of non-holonomic mechanical system we use, as till now, a discrete
modelling, their state being specified – at a given moment – by a finite number of
parameters. We will consider further systems formed by particles and rigid solids.
It is necessary to use the notions of real displacement
rd , possible displacement Δr
and virtual displacement δr introduced in Sect. 3.2.1.1 for the space
3
E , in Sects. 18.1.1.2
and 18. 2.1.2 for the spaces
3n
E , and
s
Λ
, respectively. Let be a mechanical systems S of
particles
i
P
, of position vectors r
i
, subjected to constraints expressed, in general, by real
displacements
rd
i
, = 1,2,...,in, in the form (3.2.13), if the constraints are bilateral, or in
the form (3.2.14), if these ones are unilateral; excepting special cases, we will consider only
bilateral constraints. The constraint relations are expressed in the form (3.2.15), using
virtual displacements δr
i
. If the differential forms of first degree by which these relations
are expressed are (locally) non-integrable, hence if there do not exist integrant factors for
the corresponding equations, then the respective constraints are non-holonomic (kinematic)
constraints.
Passing to the space
s
Λ , the constraint relations expressed by means of the generalized
displacements
=d , 1,2,...,
j
qj s, are of the form (see Sect. 18.2.1.2 too)
+==
0
( ; )d ( ; )d 0, 1,2,...,
j
kj k
aqtq a qtt k m,
(22.1.1)
or of the form
+==
0
( ; ) ( ; ) 0, 1,2,...,
j
kj k
aqtq a qt k m ,
(22.1.1')
where
{
}
≡
12
, ,...,
s
qqq q are generalized co-ordinates. If =
0
0
k
a , then the con-
straints are catastatic (and homogeneous) and if we have also
0, 1,2,...,
kj
ak m== , = 1,2,...,
j
s , then these constraints are even scleronomic. As
well, the constraints expressed by means of these relations are non-holonomic
(anholonomic) if there does not exist an integrant factor for the corresponding differential
equations. In Sect. 3.2.2.6, Frobenius’s theorem, which specifies the necessary and
sufficient conditions of holonomy for a constraint system, is given. Using the virtual
generalized displacements
δ
j
q , the constraint relations read
δ= =( ; ) 0, 1,2,...,
j
kj
aqtq k m.
(22.1.2)
The existence of non-holonomic constraints has not been known by Lagrange, nor by other
researchers; only in 1894, H. Hertz made distinction between holonomic and
non-holonomic constraints.
A simple example (the motion of a rigid skate on the ice plane) has been given in Sect.
3.2.2.6. Let be now a circular disc, of centre
O and radius R , which is rolling on the plane
Π (not necessarily horizontal), where we situate the system of axes
′′′
12
Oxx ; its position is
specified by the co-ordinates
′
1
x and
′
2
x of the contact point I , by the angle
ψ
between
the tangent to the disc at
I and the
′′
1
Ox -axis, by the inclination angle θ of the plane of

Dynamics of Non-holonomic Mechanical Systems
413
the disc with respect to the plane
Π
and by the angle ϕ , which gives the position of a
point
P
of the contour with respect to the point
I
(Fig. 22.1, where the sense of the
angles is put into evidence). The infinitesimal displacement of the disc is characterized by
the real displacements
12
d,d,d,dxxψθ and dϕ . In case of a rolling without sliding of the
disc on the plane
Π , case in which the relative velocity of the contact point I vanishes,
one can easily see that (the projections of the arc
dR ϕ
on the two axes of co-ordinates)
12
d cos d 0, d sin d 0xR xRϕϕ ϕϕ
′′
+=+=
(22.1.3)
or
12
cos , sinxR xRϕψ ϕψ
′′
=− =−.
(22.1.3')
We mention that the five generalized co-ordinates can take any value among the set of
possible values, hence that the disc can have any position with respect to the plane.
Indeed, starting from an initial position
′′
00000
12
,,,,xxψθϕ
, one can reach any other
position
′′
11111
12
,,,,xxψθϕ. Firstly, the disc rolls from the contact point
()
′′
000
12
,Ixx till
the contact point
()
′′
111
12
,Ixx
, along a curve of length
()
10
2, Rkkϕϕ π−+ ∈`
,
then it rotates about the normal at
1
I to the plane Π , till =
1
ψψ, and – finally – it
inclines till
=
1
θθ
. Hence, the conditions (22.1.3) or (22.1.3') do not impose any
restrictions to the values which can be taken by the considered generalized
co-ordinates; these constraints are non-holonomic and scleronomic.
Fig. 22.1 Rolling of a circular disc on a plane
Π
In the case of a system of differential forms of first degree, it is not sufficient that
only one form be non-integrable so that the corresponding mechanical system be
non-holonomic. Let be, e.g., the differential forms
() ()
=+ + = =+ + =
22 22
1121133 2122233
dd0, dd0xxxxxx xxxxxxωω ;

MECHANICAL SYSTEMS, CLASSICAL MODELS
414
each of these forms, taken apart, is non-integrable, but combinations of them lead to
()( )()
+++=+ =
123
1
22 222 22
12 12
2
d0,dln0
x
xx xxx xx
x
;
The number
r of kinematic degrees of freedom of a mechanical system is equal to
the number of linear independent virtual displacements of this system. In case of a
holonomic mechanical system, this number equates the number of the generalized
co-ordinates (
=rs), while in case of a non-holonomic one we have =−rsm. Let
be the circular disc which rolls without sliding on a horizontal plane, considered above
(Fig. 22.1); the constraint relations are written in the form
′′
δ + δ= δ + δ=
12
cos 0, sin 0xR xRψϕ ψϕ .
(22.1.3'')
These equations admit three independent systems of solutions, i.e.:
(i)
′′
δ=− δδ=− δδδ=δ=
12
cos , sin , , 0xR xRψϕ ψϕ ϕ θ ψ ,
(ii)
′′
δ =δ = δ=δ= δ
12
0, 0,xx ψϕ θ,
(iii)
′′
δ=δ=δ=δ=δ
12
0, 0,xx ϕθ ψ,
corresponding to the virtual rotations of the disc about an axis normal to the disc at the
point
I , about the tangent to the disc at the contact point, as well as about an axis
normal to the plane
Π at the point I , respectively.
22.1.1.2 Representative Spaces
We have introduced the space of configurations
s
Λ in Sect. 18.2.1 the representative
point
P being specified by a minimal parameterization =, 1,2,...,
j
qj s. In a
qualitative dynamical theory, the topological structure of this space plays an important
rôle; in this order of ideas, we consider some particular cases.
Fig. 22.2 Frictionless sliding of a ball S along the axis of a rigid pendulum
Let be a physical pendulum for which the axis of suspension passes through
O and
the position of which with respect to a vertical axis is specified by the angle
θ ; we
consider a rectilinear guide rail along the pendulum (the
Ox -axis) on which slides
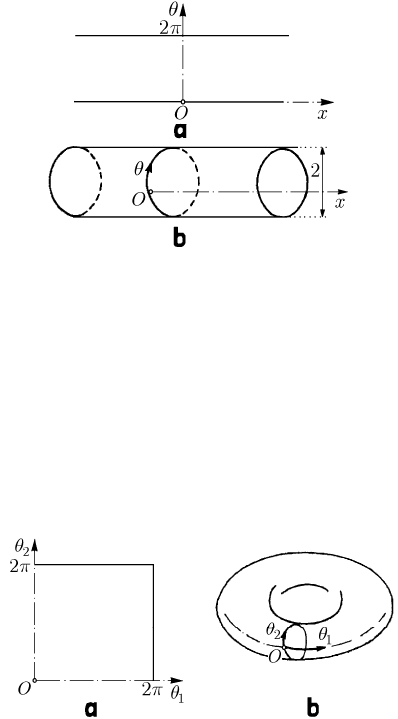
Dynamics of Non-holonomic Mechanical Systems
415
frictionless a small body (a ball)
S , its position being thus given by the generalized
co-ordinates
x and θ (Fig. 22.2). The correspondence between the point P in the
plane of configurations (
,x θ
) and the configuration of the mechanical system is not
one-to-one, because to two points (
,x θ ) and ( +,2xkθπ), ∈k ] , corresponds only
one position of the considered mechanical system; to have a one-to-one
correspondence, we must limit ourselves to the strip
≤<02θπ
(Fig. 22.3a). But we
Fig. 22.3 Physical pendulum; plane (a strip) (a) and cylindrical (b) space of configurations
notice that to two close configurations of the mechanical system
S , i.e. (
,x ε
) and
(
,2 , 0x πεε−>, arbitrary small), correspond two points of the strip, which are
distant one of the other; hence, to a continuous motion of the system
S does not
correspond a continuous displacement of the representative point. To restore the
continuity, we roll the strip on a circular cylinder of radius equal to unity and “glue” the
opposite sides. The cylinder can be thus considered to be the space of configurations
corresponding to the mechanical system
S , the correspondence between the positions
of the mechanical system and the points of the cylinder being one-to-one and
continuous (Fig. 22.3b).
Fig. 22.4 Double pendulum; plane (a square) (a) and a three-dimensional (torus) (b)
space of configurations
In case of a double pendulum, the position of which is specified by the angles
1
θ
and
2
θ
(see Sect. 17.1.1.2, Fig.17.1a), the one-to-one correspondence is ensured if one takes
as space of configurations a square of side
≤<
12
2(0 , 2)πθθπ (Fig. 22.4a). If one
rolls the square on a cylinder, gluing the opposite sides
=
1
0θ
and
=
1
2θπ
, and then
one bends the cylinder, gluing the opposite faces
=
2
0θ
and
=
2
2θπ
, one obtains a
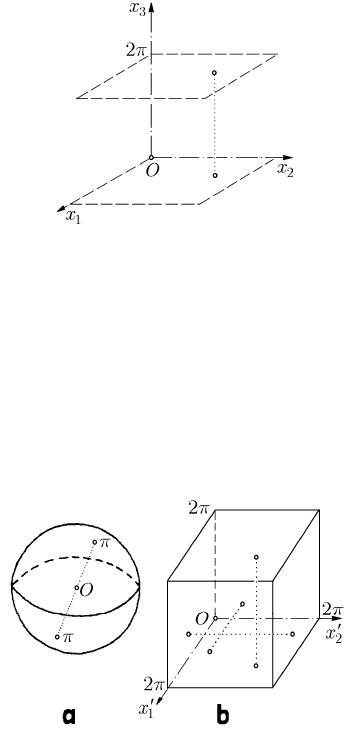
MECHANICAL SYSTEMS, CLASSICAL MODELS
416
torus (Fig. 22.4b); this is the space of configurations in case of the double pendulum,
the continuity being – as well – ensured.
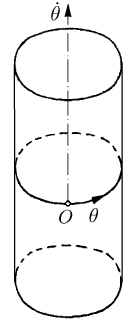
Fig. 22.5 Rigid skate – three-dimensional space of configurations
In Sect. 3.2.2.6 we have considered the motion of a rigid skate
AB on the ice plane
(plane
12
Ox x , Fig. 3.16). The position of the segment AB is specified by the
co-ordinates
1
x and
2
x of the middle C of this segment and by the angle θ made by it
with the
1
Ox -axis; one has the constraint relation (3.2.31) between these generalized
co-ordinates. The space of configurations is three-dimensional and is formed by the
stratum
≤<02θπ, two opposite points of the planes = 0θ and = 2θπ being
considered to be united (Fig. 22.5); one cannot obtain a “gluing together” in the
three-dimensional space.
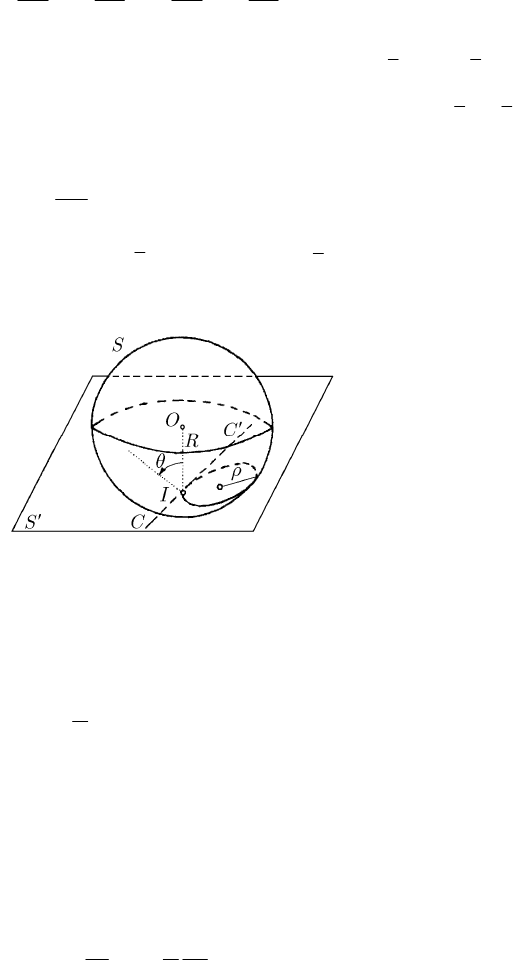
Fig. 22.6 Spaces of configurations: rigid solid with a fixed point (a); circular disc
rolling without sliding on a horizontal plane (b)
One can be show that to a rigid solid with a fixed point corresponds as space of
configurations the interior (with the frontier) of a sphere of radius π ; the diametrical
opposite points on the sphere must be considered united (Fig. 22.6a). As well, in case of
a circular disc constraint to roll slidingless on a horizontal plane (Fig. 22.1), the space
of configurations is formed from the interior (with the frontier) of a cube of side equal
to
2π , two opposite points (of opposite faces) of which being united (Fig. 22.6b),
together with the plane of the contact points (
′′
12
,xx); one obtain thus a pentadimen-
sional space of configurations (the space of configurations is the same if the motion
takes place with sliding).
Dynamics of Non-holonomic Mechanical Systems
417
The state of a mechanical system
S is specified by the generalized co-ordinates
j
q
and by generalized velocities
, 1,2,...,
j
qj s= . If there exist m relations of non-holo-
nomic constraints of the form (22.1.1) or (22.1.1'), then it is sufficient to use
−sm
generalized velocities, determining the other generalized velocities starting from these
relations; instead of generalized velocities one can use kinematic characteristics of the
form
=+ = −
0
, 1,2,...,
iijji
qi smωα α ,
(22.1.4)
i.e. linear combinations of generalized velocities with
=
12
( , ,..., ; )
s
ij ij
qq qtαα ,
= 1,2,...,js, where
[
]
≠det 0
ij
α
(22.1.4')
and
=
00
12
( , ,..., ; )
s
jj
qq qtαα . The mechanical system S is thus specified by
−2sm co-ordinates, i.e. s generalized co-ordinates and −sm kinematic
characteristics, which form the phase space
−2sm
Γ .
Fig. 22.7 Space phase of a physical pendulum
For instance, the state of a physical pendulum is specified by an angle
θ and by a
generalized angular velocity
θ
; the corresponding phase space is a circular cylinder, θ
being along the director circle, while
θ
is along the generatrix, the correspondence
with the state of the physical pendulum being one-to-one and continuous (Fig. 22.7).
In the problem of the rigid skate on the ice plane (known as Chaplygin’s problem)
can be introduced the kinematic characteristic
=+
12
cos sinvx xθθ instead of
1
x
and
2
x , hence the velocity of the middle C of the segment AB ; the co-ordinates
12
,,,xxθ ,v θ
lead thus to a pentadimensional phase space. This space cannot be
MECHANICAL SYSTEMS, CLASSICAL MODELS
418
visualized, but one can visualize sections in this space, e.g.
=
1
constx and
= constθ
.
22.1.1.3 Kinematics of the Rolling of a Rigid Solid on Another One
Let be two rigid solids
S and
′
S , bounded by two convex surfaces S and
′
S
,
respectively, which – at any moment
t have the same tangent plane at an ordinary
common point
, , PPPSP S
′′′
≡∈∈ (see Sect. 5.3.3.1, Fig. 5.29); to fix the ideas,
we admit that the rigid solid
′
S
is fixed, while the rigid solid S is movable,
remaining permanently in contact with the rigid solid
′
S
. The velocity v ()
Q
t of a
movable point
Q which coincides with
′
≡PP
at any moment
t
is the velocity of
transportation (velocity of sliding) with respect to the fixed surface
′′
=−vvv()
QPP
S
, contained in the common tangent plane. If =v
Q
0 , then the
surface
S rolls without sliding over the surface
′
S
. The motion of the rigid solid S
with respect to the rigid solid
′
S is specified if the angular velocity vector ()tω ,
which passes through the point
P
is given too; hence, this motion is characterized by a
translation of velocity
v ()
Q
t
and by a rotation of angular velocity ()tω .
The vector
()tω can be decomposed in two components: an angular velocity ()
n
tω
along the normal to the tangent plane, which characterizes a pivoting about the
respective axis, and an angular velocity
()
t
tω , contained in the tangent plane, which
characterizes a rolling about the corresponding axis. In general, the motion of the rigid
solid
S over the rigid solid
′
S takes place so that the surface S is rolling and
pivoting with sliding on the surface
′
S
. If =v ()
Q
t 0 , then the motion of the rigid solid
S with respect to the rigid solid
′
S is an instantaneous rotation (pivoting and rolling)
about an instantaneous axis of rotation which passes through the point of contact. The
fixed axoid
f
A
intersects the surface
′
S
along the curve
′
C
(the locus of the point Q
with respect to the surface
′
S
), while the movable axoid
m
A intersects the surface S
along the curve
C (the locus of the point Q with respect to the surface S ); in this case
′
=vv
P
P
, so that – during the motion – the curve C rolls without sliding over the
curve
′
C
. In particular, if ==0( )
n
t
ωωω, then the surface S is rolling slidingless
over the surface
′
S
(pure rolling; e.g., the rolling of a cylinder, when the instantaneous
axis of rotation is the contact generatrix); analogously, if
()
n
t
==0ωωω, then the
surface
S is pivoting without sliding over the surface
′
S
(pure pivoting, e.g., the
rotation of a sphere on a horizontal plane about its vertical diameter). If
≠v ()
Q
t 0 ,
then the particular rotations considered above are associated with a sliding.
To can establish the constraint relations which take place in the considered motion,
one must determine the connection between the angle of rotation
=ddtθω and the
arcs
ds and
′
ds
, described by the contact point
Q
on the curve C and on the curve
′
C
, respectively. Introducing the angle of rotation d
r
θ , corresponding to the pure
rolling, and the angle of rotation
d
p
θ , corresponding to the pure pivoting, we may
write
=+dd d
rp
θθ θ
;
(22.1.5)
Dynamics of Non-holonomic Mechanical Systems
419
we notice that the arc elements
ds and
′
ds
depend only on d
r
θ , because the point
Q
does not move during the pivoting.
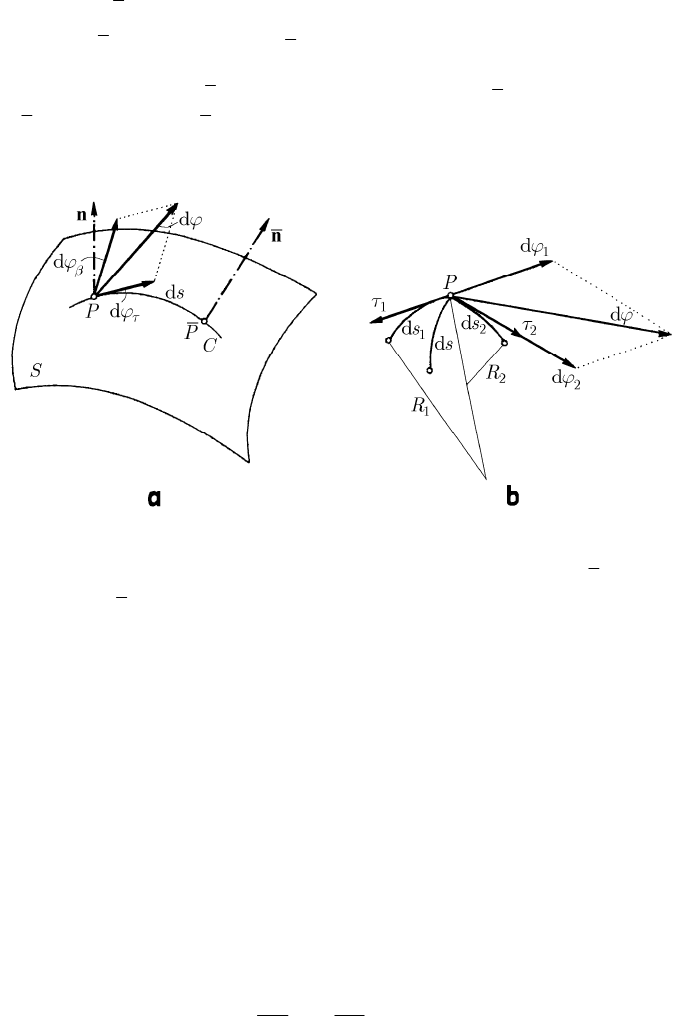
Let
P
and P be two successive contact points on the surface
S
, along the curve
C , so that
p
= dPP s , while n and =+nn nd are unit vectors normal to S at these
points, respectively (Fig. 22.8a); analogically, corresponding to the surface
′
S
, we
consider the points
′
P
,
′
P
and the unit vectors
′
n and
′′ ′
n=n n+d . Because
××nn=n nd and
′′ ′ ′ ′
××≅×
nn=n n n ndd, we can write
()
′′
=× +× =× +
nnnnn n nddd dd
r
θ .
(22.1.6)
Fig. 22.8 Geometric elements at two successive points (a) or at a point (b) of a surface
Let us denote by d
ϕ
and
′
d
ϕ
the angles made by the normals n and n and by the
normals
′
n and
′
n , respectively; we can write (we notice that ⋅=nnd0)
=× = ×
′′ ′′ ′′
=× = ×
nnn n
nnn n
dd,dd,
dd,dd.
ϕϕ
ϕϕ
(22.1.7)
We decompose
d
ϕ
along the tangent to the curve C and along the normal to it
(
=+dd d
τ
β
ϕϕ ϕ
; Fig. 22.8a); the vector d
β
ϕ
is contained in the tangent plane (as
well as the vector
d
ϕ
). The angle d
β
ϕ
is the angle of curvature, while the angle
d
τ
ϕ
is the angle of torsion. If the curve C is a line of curvature of the surface S , then
the torsion vanishes and the angle of curvature is given by
=dd/sR
β
ϕ
, where R is
the corresponding principal radius of curvature. Let
1
τ and
2
τ be the unit vectors
tangent to the lines of curvature at
P ,
1
ds and
2
ds the elements of arc along these
lines and
1
R
and
2
R
the corresponding radii of curvature (Fig. 22.8b); we can thus
write
=− +
21
12
21
dd
d
ss
RR
ϕ
ττ.
(22.1.8)
MECHANICAL SYSTEMS, CLASSICAL MODELS
420
Observing that
′
=+ddd
r
θ
ϕϕ
, it results
′′
′′
=− + − +
′′
2121
1212
2121
dddd
d
r
ssss
RRRR
ϕ
ττττ,
(22.1.9)
where we use analogous notations for the surface
′
S
. Let be
dτ
and
′
d
τ the
projections on the common tangent plane of the variations of the unit vectors tangent to
the curves
C and
′
C
at the point Q , respectively; we notice that
′
=−ddd
p
θττ.
The velocity of pivoting is thus given by
()
′
==−
d
d
p
pg
Q
g
KKv
t
θ
ω
, (22.1.10)
where
= d/d
Q
vst, while = d/d
g
Ksτ and
′
′
= d/d
g
Ksτ
are the geodesic
curvatures of the curves
C
and
′
C
, respectively, at the same point Q .
Fig. 22.9 Rolling of a sphere on a horizontal plane
In particular, let us consider the rolling of a sphere of radius
R on a horizontal plane
with a constant angular velocity
ω
; the principal radii of curvature of the sphere being
equal to
R , while those of the plane being infinite, it results
()
=−
21 12
1
ddd
r
ss
R
θττ,
(22.1.11)
wherefrom the angular velocity of the pure rolling is given by
= d/d
rr
tωθ.
The velocity of displacement of the contact point is normal to the angular velocity
r
ω and has the magnitude =
r
Q
vRω . The curve
′
C
in the fixed plane is a straight
line, while the curve
C on the sphere is a circle of constant geodesic curvature given
by
==
11
p
gp
r
Q
K
vR
ω
ω
ω
.
(22.1.12)

Dynamics of Non-holonomic Mechanical Systems
421
To calculate this curvature, we notice that
1/ /cos , sin
g
KRρθρ θ==, where ρ is
the radius of the circle
C , while the angle θ specifies the inclination of the plane (Fig.
22.9). Eliminating the angle
θ
, we get
=−
2
22
11
g
K
Rρ
.
(22.1.12')
In connection with the motion of a rigid solid which slides frictionless on a fixed
plane, we mention the considerations in Sect. 17.1.2.3. In particular, one considers
the case of a heavy homogeneous rigid solid of rotation (in Sect. 17.1.2.4), the case
of a heavy gyroscope (in Sect. 17.1.2.5), the case of a rigid cylindrical solid (in
Sect. 17.1.2.6) and the case of a sphere (in Sect. 17.1.2.7), the fixed plane being
horizontal. The motion without sliding of a sphere on a fixed plane is studied in
Sect. 17.1.2.7 too; in Sect. 17.1.2.8 has been considered the case of a hollow
homogeneous sphere, the plane being horizontal. As well, the motion without
sliding of a heavy circular disc has been presented in Sect. 17.1.2.9.
22.1.2 Conditions of Holonomy. Quasi-co-ordinates. Non-holonomic
Spaces
In what follow, we will present firstly some conditions of holonomy, we introduce
then the notion of quasi-co-ordinate, the corresponding relations of transposition being
also established. As well, we make considerations concerning the introduction of the
non-holonomic spaces too.
22.1.2.1 Conditions of Holonomy
Let be a mechanical system S , the representative point (;)qt of which is
subjected, in general, to the constraint relations (22.1.1), written in the form (
=
0
tq,
for the uniformity of the notation)
()
=
==
∑
0
; d 0, 1,2,...,
s
j
kj
j
aqtq k m.
(22.1.13)
From the geometric point of view, these conditions show that a point in the space
(;)qt
cannot be displaced arbitrarily, but only along a curve which is tangent at any point of it
to a
−()sm-dimensional hyperplane, which contains all the vectors
0
12
d,d,d,qqq
...,d
s
q
, which satisfy the conditions (22.1.13); if the system (22.1.13) is not integrable,
then the representative point can occupy any point in the space
(;)qt , although the
imposed restrictions.
First of all, let us consider the particular case
= 3s , with a scleronomic constraint
relation
()() ()
++=
1 123 1 2 123 2 3 123 3
,, d ,, d ,, d 0a qqq q a qqq q a qqq q ;
(22.1.14)