Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
352
()
=δ+δ+δ++δ−δ
∫
22 33 1
...
ss
C
Iztpqpq pqKq
v
,
(21.1.33)
preserving the aspect of the Poincaré-Cartan integral. Thus, the motion of the system
will be described by Hamilton’s differential equations
∂∂
==−
∂∂
∂∂
===
∂∂
11
11
d
,,
d
dd
, , 2,3,..., ,
dd
jj
jj
tKz
K
qzq
qp
KK
js
qpqq
(21.1.33')
where
1
q is the independent variable.
For instance, in case of the linear oscillator, for which
=+=−
22
1
22
k
Hpqz
m
,
(21.1.34)
we obtain
=− = − −
2
2Kpmzkq;
(21.1.34')
the canonical equations will be
==
−−
2
d1d
,0
dd
2
tm z
z
qk q
q
k
,
being thus led to
, constzhh=− = , and to
=+= +
−
∫
2
d
arcsin
2
2
qk
tq
h
h
q
k
ωϕϕ
,
wherefrom
()
=−==
2
sin , ,
hk
qa t a
km
ωϕ ω ,
(21.1.34'')
ϕ being an arbitrary constant.
21.1.2.5 Integral Invariants and Differential Forms
We have introduced in Sect. 19.1.1.9 the Pfaff form of Hamilton (19.1.45), which is
a form of first degree definite on the space of states
=×
21s
SEΓ (
1
E is the space of
time). More general, we introduce on
S the form of second degree, independent on the
local system of canonical co-ordinates,

Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
353
=∧−∧dd ddd
ii
pqHtω ,
(21.1.35)
where we use the exterior product (see. App., Sec. 1.2). Let be a family of solutions of
the canonical equations
(; ),
ii
qqtλ= (; ),
ii
pptλ=
12
{ , ,..., },
r
λλλ λ≡
1,2,...,is= , which depends on the parameters ∈=[ , ], ,2,...,
jjj
ab j rλ ; thus, it is
defined a differentiable and one-to-one transformation →
:TSΛ of a domain Λ of
the space
(, )t λ into S .
Let us consider a domain
⊂
m
XE , a domain ⊂
n
YE and a differentiable
application
→:TX Y. As well, let be the function (form of zero degree)
→
:fY \
by composition with T one obtains the function (a form of zero degree
too)
∗
=Tf f TD , defining the application
∗
→
00
:() ()TFY FX
. In general, one
can define the application
∗
→:() ()
pp
TFY FX , which maps forms of degree p ,
defined on
Y
, into forms of degree
p
, defined on
X
. We mention the basic properties
of the application
*
T :
(i)
+= +
***
12 1 2
()TTTωω ω ω,
(ii)
∧= ∧
***
12 1 2
()()()TTTωω ω ω
,
(iii)
=
**
d( ) (d )TTωω,
(iv)
→→⇒ =
12
***
12 21
:,: ()TX YTY Z TT T TDD.
Observing that the form (21.1.35) can be written in the form
∂∂
⎛⎞⎛⎞
=+ ∧−
⎜⎟⎜⎟
∂∂
⎝⎠⎝⎠
dd d d d
ii
ii
HH
ptqt
qp
ω
(21.1.35')
and taking into account the canonical equations, we get
==
∂∂
=∧= ∧
∂∂
∑∑
*
,1 ,1
(d ) d d ( ; ) d d
rr
ii
jj
kjk k
j
k
jk jk
qp
TAt
ωλλλλλ
λλ
.
Poincaré’s Lemma (
=d(d ) 0ω ; see App. , Subsec. 1.2.2) leads to =
*
d( (d )) 0T ω ; it
results, further,
= 0
jk
A
, so that
*
(d )T ω
does not depend on time.
We say that a differential form
Ω of degree p , defined on S , is an absolute integral
invariant if, for any transformation
T , defined on a family of trajectories which depend
on
r parameters =, 1,2,...,
j
jrλ ,
*
T Ω is an independent p -form of t and dt , on
the space
λ , and if
=d0Ω
.
The forms
∧∧
2
d ,( d ) ,...,( d )
s
ωω ω are integral invariants, in this case, because
⎡⎤
∧= ∧=∧∧ =
⎣⎦
**
d( d ) 0, ( d ) ( d ) , 1,2,...,
p
pp
TTpsωω ω .
MECHANICAL SYSTEMS, CLASSICAL MODELS
354
Starting from the above definition, one can show that integrating
Ω on any chain
transverse to a family of trajectories one obtains a constant; hence, any invariant in the
sense of this definition is invariant in the sense of the classical definition.
We say that a
p -form Ω is a relative integral invariant if dΩ is an integral
invariant. Thus, because
dω is an absolute integral invariant, it results that ω is a
relative integral invariant (the Poincaré-Cartan invariant). We can state that the forms
∧∧∧ ∧∧
2
d , ( d ) ,..., ( d )
s
ωωω ω ω ω
are, as well, relative invariants, because
[
]
+
∧∧ =∧
1
d(d)(d)
pp
ωω ω.
If the points which correspond to transverse chains represent simultaneous chains
(for
0
consttt==
and
1
consttt==
), then
=d0t
. Poincaré’s invariant will
correspond to
ω . As well, starting from =∧ddd
ii
qpω and observing that
−
∧= ∧∧∧∧∧∧
=− ∧ ∧ ∧ ∧ ∧ ∧ ∧
1122
(1)/2
12 12
( d ) ( !)d d d d ... d d
( 1) ( !)d d ... d d d ... d ,
s
ss
ss
ss
sq p q p q p
sq q q p p p
ω
we get Liouville’s invariant.
21.1.3 Ergodic Theorems
In what follows we present the recurrence theorem of Poincaré; starting from it, we
put in evidence the so-called ergodic theorems.
21.1.3.1 Poincaré’s Recurrence Theorem
Let be an autonomous system (where the time does not appear explicitly)
12
( , ,..., ), 1,2,...,
s
jj
xXxx xj s==
,
(21.1.36)
which has the properties:
(i) Its divergence vanishes (
∂∂=/0
jj
Xx ), so that the extension in space is
invariant to a transformation
T definite by the solutions of the considered system; in a
mechanical image, we say that “the fluid is incompressible”. Obviously, this condition
holds in the case of Hamiltonian systems.
(ii) There exists a closed domain
Ω
of finite extension for which the characteristics
which start from its points are entirely in
Ω ; we say that “the fluid is moving in a
closed vessel”. Such a domain is transformed in itself by
T and is called invariant
domain.
We can state
Theorem 21.1.8 (of recurrence; H. Poincaré). For any closed subdomain
ω of Ω , no
matter how small, there exist characteristics which pass through it an infinity of times.
More precisely, for any moment
1
t , no matter how great, there exist motions of the
system for which the movable point is in
ω at a moment
>
1
tt
. Poincaré called such a
Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
355
motion, in which the system returns an infinity of times to the neighbourhood of the
initial state, “stable in Poisson’s sense”.
The central idea of demonstration of this theorem is Liouville’s theorem; no
particular property of Hamilton’s equations is used.
Poincaré’s theorem can be a starting point for new studies concerning problems of
classical dynamics. Usually, we wish to solve these problems determining explicitly the
configuration of the system at the moment
t , as a function of t and of the given
configuration at the moment
=
0
tt; but for the most problems one cannot find exact
solutions. Poincaré’s theorem plays an important rôle in this case; one can determine
the individual characteristics starting from a discussion of statistical properties of these
characteristics, taken as a whole.
Let be a mechanical system for which
H is inferior bounded in the phase space. We
can suppose that
=inf 0H
; this can be obtained by adding a convenient arbitrary
constant (which does not alter the equations of motion). Let us suppose that “the
surface”
, const, 0Hhh h== >, is closed. In this case, H is a first integral of the
canonical system and the surface
=Hh bounds an invariant domain; the domain
bounded by two such surfaces will be, analogically, an invariant domain. In case of the
system
==−,qpp q,
(21.1.37)
corresponding to a harmonic oscillator, we choose the unity of time so that the period
be
2π . The system has only one degree of liberty, hence the phase space is
two-dimensional, while the trajectories are the curves
= constH , hence the circles
()
+=>
22
1
,0
2
qp hh
;
(21.1.37')
the motion on each circle is uniform and clockwise. The circle
=+= >
22
,0rqpRR, is an invariant domain, which contains only one
trajectory. The domain
<<
12
RrR is an invariant domain too. The motion of the
fluid is a motion in which the fluid is rotating as a rigid solid. Hence, the domain
Ω
may be a circle, a circular disc or a circular annulus.
21.1.3.2 Ergodic Theorems
Poincaré’s theorem states the existence of the motions in which the movable point
re-enters in
ω an infinity of times. Further, following problem is put: How long is the
movable point in ω ? As well, the problem is put in case of discrete intervals of time:
In what proportion (of time) is the movable point in
ω ? The theorems connected to
such problems and to analogous ones are called ergodic theorems.
In connection with such problems appears the necessity of integration on a set of
points; one must use Lebesgue’s measure of a set of points instead of the simpler set of
volume or extension, sufficient till now, and the integrals will be Lebesgue integrals
instead of Riemann ones (sufficient, usually, in classical mechanics).
Let be the transformations
t
T
defined by the solutions of the autonomous system
(21.1.36) of zero divergence; let be also an invariant domain
Ω
of finite measure
mΩ
.

MECHANICAL SYSTEMS, CLASSICAL MODELS
356
We consider a function of position
()fP, definite and summable on
Ω
. We denote by
t
P
the point which is reached by the point
P
by means of the transformation
t
T
; in
other words, the movable point which starts from
0
P
at the moment
0
t
reaches
t
P
at
the moment
t . We will be interested on the mean value (with respect to time) of the
function
()fP on a portion of the trajectory (let be the trajectory which starts from the
point
A ), travelled through by the movable point from the moment
=ta
to the
moment
=tb
; let be
=
−
∫
1
() ( )d
b
b
a
t
a
AfAt
ba
μ
.
(21.1.38)
The existence of the mean value
()
b
a
Aμ
for nearly all the points ∈A Ω results from
the summability of
()fP, according to Fubini’s theorem; we exclude from the above
considerations the set of null measure of the points
A , for which the above mean value
does not exist. We can state
Theorem 21.1.9 (ergodic). The mean value
()
b
a
Aμ
tends to the limit ()Aϕ together
with
→∞b for almost all the points ∈A Ω
The proof of the theorem is made in two steps; one effects firstly a passing to limit
by entire values and then one passed continuously to the limit.
If
()Aϕ exists for a particular value of A , let be
0
()Aϕ , then it exists for all the
points
A , on the trajectory through A , having the same value in all these points. In
certain hypotheses, we can go farther, stating that
()Pϕ is constant not only along the
trajectory, but is constant on
Ω
too. This property of invariant domain is fundamental
in statistical mechanics. It does not state for Hamilton’s equations in classical dynamics;
to take place in this case too,
Ω
must be indecomposable (one must not have
=∪
12
ΩΩ Ω
, where
1
Ω
and
2
Ω are disjoint invariant domains of positive measure).
21.2 Periodic Motions. Action-Angle Variables
After the presentation of periodic and quasi-periodic motions, one introduces the
action-angle variables, useful for solving the respective problems. The important rôle
played by the adiabatic invariance is then put in evidence (Pars, L., 1965; Santilli, R.M.,
1984).
21.2.1 Periodic Motions. Quasi-Periodic Motions
The motions of planets and the atomic phenomena have, in general, a character of
periodicity; the study of the periodic motions has thus a great importance, both to
celestial and quantum mechanics. Other natural motions are only quasi-periodic
(conditionally-periodic). The respective problems play an important rôle in classical
quantum mechanics.
Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
357
21.2.1.1 Periodic and Multiply Periodic Motions
Let firstly be the case of a dynamical system which has only one degree of freedom,
to which corresponds the variable of position
q . Let us suppose that one can make a
canonical transformation
→(, ) ( , )qp wα , so that the canonical system be reduced to
= constα
, w being a circular function of time; one obtains thus a periodic motion. If
there exists a
w so that
+=()()qw qwω ,
(21.2.1)
then one obtains a phenomenon of libration (the generalized co-ordinate
q oscillates
between two limit positions), e.g., the oscillatory motions of the pendulum. If the
mechanical system returns to the same position after a certain variation of
q (let be
2π
), which is effected repeatedly, in the same interval of time, so that
+= +()()2qw qwωπ,
(21.2.1')
then the motion is a rotation (e.g., the motion of rotation of the pendulum).
In the following, we consider separable and periodic, generalized conservative
mechanical systems. Because =
0H
, the complete integral of the Hamilton-Jacobi
equation (19.2.9) will be given by (19.2.15'), where
=
s
ah; by separation of variables,
the function
S will be of the form (19.2.41). On the other hand, it results
===
12
( ; , ,..., ), 1,2,..., ,
ss
jjj
ppqaa aj sah.
(21.2.2)
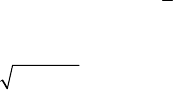
Fig. 21.5 Motion of libration (a); motion of rotation (b)
We say that the motion is multiply periodic if the conjugate canonical co-ordinates
()and ()
jj
qt pt admit the same period
j
T (the projection of the representative point on
the plane
(, )
j
j
qp describes a closed curve
j
C , corresponding to a motion of libration
(Fig. 21.5a)) or if any generalized momentum
j
p is a periodic function of
j
q , with the
period
j
Q (the projection of the representative point on the plane (, )
j
j
qp describes a
periodic open curve
j
C , corresponding to a motion of rotation (Fig. 21.5b)).
For instance, in case of an anisotropic linear oscillator, the components of the elastic
force are
− (!)
jj
kx ; there results the Hamiltonian
MECHANICAL SYSTEMS, CLASSICAL MODELS
358
==
=+
∑∑
22
11
11
22
ss
j
jj
jj
Hpkx
m
.
(21.2.3)
The relations (21.2.2) are given by
+== ++=
22
123
,1,2,3, 2
jjjj
pmkx aj aaa mh,
(21.2.3')
the obtained closed curves
j
C being ellipses (motion of libration).
In case of a mathematical pendulum, Hamilton’s function is given by
=−
2
2
1
cos
2
Hpmgl
ml
θ
θ ,
(21.2.4)
the generalized momentum being
=()Hh
()
=+
2
2cospmlhmgl
θ
θ ;
(21.2.4')
if
>
hmgl
, then the generalized momenta p
θ
vary periodically and θ increases
unlimited (motion of rotation).
21.2.1.2 Linear Periodic Motions
In the case in which we have only one degree of freedom, the canonical equations are
∂∂
==−
∂∂
,
HH
qp
pq
(21.2.5)
with Hamilton’s function
=−
2
1
() ()
2
HfqpUq
,
(21.2.5')
where
()Uq is the potential of forces; there results the reduced Hamilton–Jacobi
equation
∂
⎛⎞
=+
⎜⎟
∂
⎝⎠
2
() 2( )
S
fq U h
q
,
(21.2.6)
h being the constant of energy. Integrating this equation, we get
+
=
∫
2( )
d
()
Uh
Sq
fq
,
(21.2.6')
so that
∂
−= =
∂
+
∫
0
d
2( ) ( )
Sq
tt
h
Uhfq
.
(21.2.6'')
Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
359
The study of the motion depends on the study of the equation
≡+ =() 2( )() 0qUhfqϕ .
(21.2.7)
One can show that
q cannot pass beyond a value
0
q , a real root of the equation
=() 0qϕ (we have at any moment <>
00
orqq qq). Often, q oscillates between two
limit values
<<qαβ; in general, taking into account the preceding result, if α and
>βα are two real roots of the mentioned equation, then
q
can vary in the interval
(,)αβ or can remain outside this interval, as – at the initial moment – q belongs or not
to the respective interval.
If
1
q and
2
q are multiple roots of order of multiplicity m and n , respectively, we
can write
==− −
2
() ( ) ( ) ()
mn
qqq qqϕαβψ ,
(21.2.7')
where
()qψ does not have roots in the neighbourhood of α and β . A change of
independent variable
t
, by the relation
=
d1
()
d
w
q
t
ψ
ν
,
(21.2.8)
where
ν is a non-determinate constant, allows a more convenient analysis of the
differential equation (21.2.7'). One takes the sign + before the radical, so that
w does
vary in the same sense as
t ; as well > 0ϕ , because it cannot change of sign in the
considered interval, being a continuous and finite function of
q . One obtains
=− −
/
2
/
2
d
()()
d
mn
q
qq
w
να β ,
(21.2.8')
from (21.2.7') and (21.2.8).
We get the integral
=+
22
() cos sin
22
qw w w
νν
αβ,
(21.2.9)
in the particular case
==1mn ; hence, q is a periodic function of w , of period
2/πν. The constant ν is determined by the condition that q be a periodic function of
time, of period
==
−−
∫∫
2
1
2/
0
dd
() ( )( ) ()
q
q
wq
T
qqqq
πν
ν
ψαβψ
,
(21.2.9')
where
q is given by (21.2.9). It results thus a motion of libration, the limits
1
q and
2
q
being reached by
q .

MECHANICAL SYSTEMS, CLASSICAL MODELS
360
If
m and n differ from unity, then one can make an analogous study; in this case,
d/dqw does not change of sign, q nearing asymptotically one of the two frontiers (
1
q
and
2
q ), without reaching it in a finite time.
21.2.1.3 Quasi-Periodic Motions
Let us consider now a generalized conservative dynamical system with
> 1s
degrees of freedom; assuming that the system is with separate variables, we use
Stäckel’s theory (see Sect. 19.2.2.3). Let
j
α and
j
β be two isolated consecutive zeros
of multiplicity
j
m
and
j
n
, respectively, of the function ()
j
j
qϕ , specified by
(19.2.58), so that the initial values do satisfy the relations
<< =
0
, 1,2,...,
jj j
qj sαβ .
In this case
=− − =( ) ( ) ( ) ( ), 1,2,...,
jj
mn
jj j j j j jj
qq q qj sϕαβψ ,
(21.2.10)
with
> 0
j
ψ and without any other zero in the considered interval.
Let us make the change of variable
=− − =
/2 /2
d ( ) ( ) d , 1,2,...,
jj
mn
jjj jj j
qq q uj sαβ
;
(21.2.11)
as well, let us denote (see Sect. 19.2.2.3)
==
()
( ) , , 1,2,...,
()
j
jk
j
jk
jj
q
fq jk s
q
λ
ψ
,
(21.2.12)
According to the lemma in the preceding subsection, the variables
j
q remain in the
interval
(,)
j
j
αβ , the motion being thus a libration. We consider thus the more simple
case in which
==1
jj
mn , case in which all variables have a variation of libration.
We obtain
=+ =
22
cos sin , 1,2,...,
22
jj
jj j
uu
qjsαβ
,
(21.2.13)
in this case; introducing in (21.2.12), we can calculate
=
∫
()d
jk
j
j
jk
fq u
χ
.
(21.2.12')
The quantity
=+−
2(2)()
jk jk
j
j
jk
uu
χχ
ωπ
is constant, because
j
q
is a periodic function of
j
u
; we have

Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
361
== =
−−
∫∫
0
()d
( )d , , 1,2,...,
()()()
j
j
jj
jk
jj
jk jk
jjjjjj
qq
fq u jk s
qqq
πβ
α
λ
ω
αβ ψ
.
(21.2.14)
We introduce the new variables
, 1,2,...,
j
wj s= , by means of the relations
==
== − =+
∑∑
11
, , 1,2,..., 1,
ss
s
jjsj
jk k
jj
wbjk s wtbωω,
(21.2.15)
as in Sect. 19.2.2.3. Assuming that
≠det[ ] 0
jk
ω , it results =
12
(,,..., )
s
jj
qqww w,
with
, , const, 1,2,...,
jj jjj
wt j sνγνγ=+ = = .
If the frequencies
j
ν are commensurable (are of the form ,
jjj
nnνν=∈` ), then
the motion is periodical; otherwise, the motion is similar to a Lissajous one. In such a
motion, the trajectory passes as much as possible near to any point in
s
Λ ; it satisfies the
quasi-ergodic hypothesis: the trajectory fills everywhere dense the whole domain of
co-ordinates. The motions which fulfil this condition care called quasi-periodic;
(conditional periodic) motions; as examples of problems which lead to such motions,
we mention: the problem of two particles, the problem of two centres, the spherical
pendulum etc.
21.2.2 Action-Angle Variables
In what follows, we introduce the action variables and the angle variables, useful to
solve the above mentioned problems; we present then some applications.
21.2.2.1 Action Variables. Angle Variables
We introduce the variables (without summation)
=
∫
d
j
jjj
C
Jpq
v
,
(21.2.16)
of the form
12
( , ,..., ), 1,2,...,
s
jj
JJaa aj s== (taking into account (21.2.2)), called
action variables; obviously, these integrals are areas (see Fig. 21.5a). There result
12
( ), { , ,..., }, 1,2,...,
s
kk
aaJJJJ Jk s=≡ =, so that the complete integral of the
reduced Hamilton-Jacobi equation becomes
= (, )SSqJ,
(21.2.17)
Hamilton’s function (due to the first integral of the energy, we have
=Hh
) will be of
the form
==()HHJ h,
(21.2.17')
where we took into account the modality to introduce the constants
k
a . We notice that
the function (21.2.17) plays the rôle of a function
1
S generating canonical