Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


Variational Principles. Canonical Transformations
331
20.3.3.8 The Galileo–Newton Group
Let
4
E be the Euclidean space spanned by the vectors
()
()
123
,,; ;xxxt=≡xrt.
The Galileo–Newton group
G is the group of endomorphisms of
4
E , of the form
t
′
=++
rRrva, ttτ
′
=+
(20.3.97)
and it consists of a time translation, defined by
τ, a translation in
3
4
EE⊂ , defined by
3
E∈a
, a transformation of the form (20.3.79) from the Galileo group
Γ
and a
rotation
SO(3, )∈ \R of the space
3
E
. The Galileo-Newton group is a subgroup of
the affine group in four dimensions or, in homogeneous co-ordinates, a subgroup of the
general linear group
()
GL 5, \ .
The time interval between two events in the space
4
E ,
21
tt tΔ =−, as well as the
spatial distance between two simultaneous events
21
Δ =−rrr,
21
tt= , are
invariant with respect to the transformations of
G. Reciprocally, the Galileo–Newton
group is the most general group of linear transformations in
4
E , which preserves the
intervals
tΔ and Δr . The elements of the Galileo-Newton group G depend on ten
parameters, and are denoted by
()
,,,τgavR. The induced composition law is defined
by
()
()
()
,,, ,,, , , ,ττ τττ
′′ ′ ′ ′ ′ ′′ ′ ′
=+++ +g a v R g a v R g a Ra v v Rv RR
.
(20.3.98)
The identity element of the group is
()
0, , ,g001, where 1 is the identity element in
SO(3, )\ , while the inverse of a given element is
()
1
1
,,,τ
−
−
==ggavR
()
111
,( ), ,ττ
−−−
=− − −gRavRvR. The Galileo–Newton group is isomorphic to the
group of matrices
11
22
33
()
0001
0000 1
va
va
va
τ
⎡
⎤
⎢
⎥
⎢
⎥
⎢
⎥
→=
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
R
gtg
(20.3.99)
of order five, which depend on ten parameters and satisfy the relation
()()()
12 1 2
=tgg tg tg ,
(20.3.99')
identical with the internal composition law (20.3.98).
We will outline now some results from the theory of the Galileo–Newton group.
Thus, it can be shown that the group G is a non-compact Lie group. The most
important subgroups of the Galileo–Newton group are:

MECHANICAL SYSTEMS, CLASSICAL MODELS
332
(a)
()
{
}
,,,τ=T g001
– the group of time translations,
(b)
()
{
}
0,,,T = ga01
– the group of space translations in
3
E ,
(c)
()
{
}
0, , ,Γ = g0v1
– the Galileo group,
(d)
()
{
}
SO(3, ) 0,,,=\ g00R
– the group of proper rotations in
3
E .
The direct product of the groups
T×T forms an invariant Abelian subgroup of G,
and the corresponding factor group is the semi-direct product
SO(3, )Γ ∧ \ , that leads
to the decomposition
SO(3, )()( )T Γ ∧=×∧ \GT .
(20.3.100)
Note that there are also other decompositions of
G, like the following one
SO(3, )()( )T Γ ∧=×∧ \GT,
(20.3.100')
where
T Γ× is the maximal invariant Abelian subgroup of G.
The basis of the Lie algebra associated to
G comprises ten elements corresponding
to the subgroups
T, T, Γ , and SO(3, )\ . Consequently, the first integrals obtained
from the invariance of the Lagrangian with respect to these subgroups, determine the
generators of the Lie algebra, corresponding to the relation (20.3.60). Thus, we obtain:
(
α )
H
– the generator of
T,
(β )
k
P , 1, 2, 3k = ,
– the generators of T,
(
γ )
0
k
ξ , 1, 2, 3k = ,
– the generators of
Γ ,
(
δ )
(1/2)
i
ijk jk
=∈KK, 1,2, 3i = , – the generators of SO(3, )\ .
Hence, the generator of an infinitesimal transformation of
G has the form
00
1
2
ij ij i i i i i i i i i i
av avδε δ ξ δ δτ δθ δ ξ δ δτ=+++=+++XK P H K P H.
(20.3.101)
The matric form of these generators follows from the representation (20.3.99). We
can also obtain these generators in the form of differential operators. Thus, we consider
the space of square integrable functions (;)ftr , defined on
4
E . Then, we obtain the
regular representation of
G as the set of differential operators u acting in the space of
the functions f, defined by the equation
()()
()
1
,,, ; ( ),ft f t tτττ
−
=−−+−uavR r Rrvav .
(20.3.102)
Finally, we obtain the basis of the Lie algebra associated to
G, as the set of generators
t
∂
=
∂
H , = ∇P ,
0
t=
ξ
∇ , =×r ∇K ,
(20.3.103)
Variational Principles. Canonical Transformations
333
that satisfy the commutation relations
()
,
ij
ijk k
=∈KK K,
()
00
,
ij
ijk k
=∈
ξξ
K ,
()
,
ij
ijk k
=∈KP P,
()
0
,
ii
=ξ HP,
()
()()
()
()()
00 0
,, , , ,,0
i ijijiji
ξξ ξ======KH P PP PH HH .
(20.3.103')
The subgroup structure of
G can be determined by means of the Lie subalgebras which
may be identified on the basis of these commutation relations. From (20.3.103') we can
also obtain the two invariants of the Galileo–Newton group
22
P = P
,
()
2
20
N =×Pξ .
(20.3.104)
The invariance of the Lagrangian of a mechanical system with respect to the
Galileo–Newton group is the necessary and sufficient condition for the conservation of
the generalized linear and angular momenta, of the generalized mechanical energy and
of the uniform rectilinear motion of the centre of mass. The corresponding Lagrangian
has the form (20.3.85). It is easy to show that, under the transformations of the Galileo-
Newton group, the mechanical energy and the momentum of a free particle are
transformed according to the relations
()
2
1
2
EE m
′
=+⋅ +vRp v, m
′
=+pRp v.
(20.3.105)
It follows that
22
11
22
VE E
mm
′′
=− =−pp,
(20.3.106)
i.e. V is invariant with respect to the transformation of
G. To prove (20.3.106) we used
the invariance of the dot product with respect to
SO(3, )\ , that is
()()⋅=⋅Rp Rp p p .
From a mechanical point of view, V represents the difference between the
mechanical energy and the kinetic energy of the particle, that is the energy of the
particle at rest (
=p0); hence, we may say that V represents a sort of “intrinsic energy”
(of the nature of a potential energy) of the particle. It is worthwhile to mention that,
while in the relativistic mechanics the existence of the rest energy of a particle is an
obvious result, a similar energy appears here in the context of classical mechanics, from
considerations on the symmetry properties of the Lagrangian in a four-dimensional
Euclidean space-time.

Chapter 21
Other Considerations on Analytical Methods in Dynamics
of Discrete Mechanical Systems
Closely connected to the canonical transformations, one can introduce the notions of
integral invariant and of ergodicity. The action-angle variables, useful in the study of
periodic motions, are then considered.
The methods of exterior differential calculus prove their importance to mathematical
modelling of the phenomena of nature, in particular to mathematical modelling of
mechanics; in this order of ideas, we will present some elements of invariantive
mechanics. Besides the formalisms in the spaces
s
Λ and
2s
Γ , other formalisms can be
used in various cases; we mention thus the Birkhoffian formalism, applicable to a larger
circle of problems than of the Lagrangian and Hamiltonian formalisms.
The theory of control will allow then a profound insight into optimal trajectories.
21.1. Integral Invariants. Ergodic Theorems
After some results concerning the integral invariants of order
2s
, one passes to a
study of the integral invariants of first order. As well, one makes some general
considerations concerning ergodic theorems (Arnold, V.I., 1976).
21.1.1 Integral Invariants of Order 2s
In what follows one introduces the notion of integral invariant and one gives some
corresponding general results; one passes then to the case of the absolute integral
invariant of order
2s .
21.1.1.1 Notion of Integral Invariant. General Considerations
We return to the system of differential equations (15.1.22), written in the form
=
12 2
( , ,..., ; )
jj
s
xXxx xt ,
1,2,...,2
j
s=
(21.1.1)
for
=+21ns; if the functions
j
X and / , , 1,2,...,2
j
k
Xxjk s∂∂ = , are definite and
continuous in a neighbourhood
U
of the point (
00 0
0
12 2
, ,..., ;
s
xx x t), then there exists a
neighbourhood
⊂UU
in which the solutions of this system of differential equations is
obtained by means of the first integrals (15.1.23). The initial conditions of Cauchy type
335
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009
MECHANICAL SYSTEMS, CLASSICAL MODELS
336
allow to determine the integration constants so that through any point
∈
000 0
0
12 2
( , ,..., )
s
Pxx x D does pass an integral curve (according to the theorem of
existence and uniqueness)
==
00 0
12 2
( ; , ,..., ), 1,2,...,2
s
kk
xxtxx xk s,
(21.1.2)
and only one; vectorially, we can write (we consider
2s
-dimensional vectors)
=rrr
0
(; )t .
(21.1.2')
As well,
()
()
⎡⎤
∂
=≠
⎢⎥
∂
⎣⎦
12 2
00 0
12 2
, ,...,
det 0
, ,...,
s
s
xx x
J
xx x
,
(21.1.2'')
so that we also may calculate
==
00
12 2
( ; , ,..., ), 1,2,...,2
kk
s
xxtxx xk s
,
(21.1.2''')
or
=rrr
00
(, )t ,
(21.1.2
IV
)
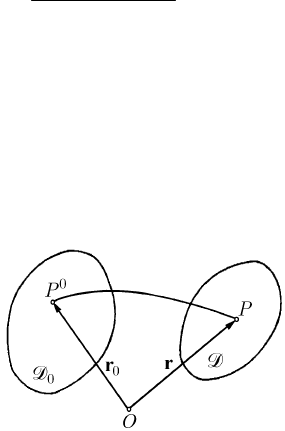
Fig. 21.1 Transformation of the domain
0
D into the domain D
A representative point
0
P corresponds to the state of the mechanical system for
=
0
tt
, in the phase space
2s
Γ
, so that
0
D represents a set of possible states of the
system. If we fix
r
0
, then the trajectory of the representative point which passes
through
0
P
is given by (21.1.2'). If we fix t , while r
0
travels through the domain
0
D , then (21.1.2'') corresponds to a continuous and twice differentiable transformation
of the domain
0
D into a domain ⊂
2s
ΓD (Fig. 21.1); thus, the domain D represents
the set of the states of the mechanical system at the moment
t , every state
corresponding to a state at a point of the domain
0
D . In a physical (mechanical)
modelling one can imagine that the representative points are the particles of a fictitious
Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
337
fluid which occupies the domain
0
D at the moment
0
t and the domain D at the
moment
t .
The transformation (21.1.2) is one-to-one and bicontinuous (hence topological), so
that a point of
0
D passes at a point of D , while any point of D is the image of only
one point of
0
D ; hence, the transformation (21.1.1) preserves the individuality of the
points, as well as the domain
D as a material variety. Indeed, the domain D is formed
only of the points which have been in
0
D at the initial moment. In general, the
transformation (21.1.1) conserves any material variety: curves (linear varieties),
surfaces (two-dimensional varieties) etc.
Let us consider an integrable function
= r(;)FFt of class
1
C definite on the set of
possible states
D of the system at the moment t . We say that the quantity
=δ
∫
r
22
(;)
ss
IFtV
D
,
(21.1.3)
where the element of volume
δ=δδδ
2122
...
ss
Vxxx (we use the operator δ because we
calculate for a fixed
t ) is an integral invariant of the system (21.1.1) if
(δ = δ δ δ
0000
2122
... )
ss
Vxxx
δ= δ
∫∫
rr
0
0
0
22
(;) ( ;)
ss
FtV F tV
DD
(21.1.3')
for any moment
t
; in this case,
2s
I
is an invariant of the transformation (21.1.2). In
general, the integral
2s
I depends on t (directly, through the agency of r and of D );
hence, it is necessary that
=
2
d/d 0
s
It.
Let be a curve of possible states of the system at the moment
t and the form of first
degree
=
=δ
∑
2
1
1
s
ii
i
Fxω ,
definite on
Γ ; one obtains an integral invariant
∫
1
Γ
ω if
=
∫
∫
0
11
ΓΓ
ωω.
(21.1.4)
One can make an analogous statement for a surface of simultaneous states.
Let be a
m -dimensional manifold
m
V and let be
=
=()δ
∑
∫
r
1
;
m
N
k
mm
k
V
k
IFtV,
(21.1.5)

MECHANICAL SYSTEMS, CLASSICAL MODELS
338
where δ=δδ δ
12
...
m
m
k
ii i
Vxxx, the indices
12
, ,...,
m
ii i taking all the values from
1to2s , while the index k (which specifies the volume element) takes all the values
from
=
2
1to
m
s
NC (the number of volume elements);
m
I is an integral invariant if
==
()δ = ( )δ
∑∑
∫∫
rr
0
0
00
11
;;
m
m
NN
kk
mm
kk
VV
kk
FtV F tV
(21.1.5')
at any moment
t .
In general, let be a
m -chain
, 1 2
m
Vms≤≤
, of possible states at the moment t ;
if one gives the form
=
=δ∧δ∧∧δ
∑
r
12
1
(;) ...
m
N
m
ii i
k
k
Ftx x xω
, defined on
m
V ,
where the indices
12
, ,...,
m
ii i take all the values from 1to2s , the sum having
2
m
s
C
terms and where we have introduce the exterior product (see App., Subsec. 1.2.1), then
we say that the quantity
∫
m
m
V
ω is an integral invariant if (
0
m
V is the m -chain of states
at the initial moment, from which result, by trajectories, the states of
m
V )
=
∫∫
0
mm
mm
VV
ωω.
(21.1.4')
The order of the invariant is specified by the degree of the form. The integral invariant
is called absolute (denoted by
m
I ) if
m
V is an open set or relative (denoted by
m
I ) if
m
V is a closed set (with frontier). Using Stokes’s theorems, we notice that
+
=
1
m
m
II ;
(21.1.6)
one can state
Theorem 21.1.1 A relative invariant of order
m is equivalent to an absolute invariant
of order
+ 1m .
Thus, in case of a relative invariant of first order we have (see. App. Subsec.2.3.2)
∂
==
<
∂
∂
⎛⎞
δ= − δδ
⎜⎟
δδ
⎝⎠
∑∑
∫∫
22
22
1,1
ss
j
k
j
kk k
VV
j
k
kjk
jk
F
F
Fx xx
xx
,
(21.1.6')
where
2
V
is a surface which leans upon a closed curve
∂
2
V
.
If we replace the initial values by (21.1.2
IV
) in (21.1.3'), then we get an invariant of
the form
δ
∫
r(;)tVΦ
D
,
the integrand of which depends on the system of the chosen initial values; observing
that these values can vary arbitrarily, we can state

Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
339
Theorem 21.1.2 A differential system of the form (21.1.1) has an arbitrary number of
integral invariants.
21.1.1.2 Complete Absolute Integral Invariants
Let be an infinitesimal domain
D , neighbouring the domain
0
D , both arbitrary; in
this case,
==
()δ = ( )δ
∑∑
rr
0
00
11
;;
NN
kk
mm
kk
kk
FtV F tV.
(21.1.7)
Let us denote the differential form in (21.1.7), called “the element of the invariant”, by
δrr(;; )Ft . Making the substitution (21.1.2
IV
) in the second member of this relation,
that one becomes a functions of
r and t and δr , let be Φ ; we have
δ= δrr rr
00
(;; ) (;; ;d)Ft t tΦ .
(21.1.8)
Taking into account how the function
Φ has been built up, we notice that its numerical
value depends only on the initial values
r
0
and δr
0
and does not depend on the chosen
point (
r;t ) on the actual trajectory and nor on the point ( +δ +δrr;tt) chosen on the
neighbouring infinitesimal trajectory. Hence,
Φ is an invariant form, more general that
the invariant from which we started, because we are no more obliged to consider only
the simultaneous points.
If we assume that
= constt in the relations (21.1.2'''), then we must have
δ= δrr rr
00
(;; ;0) (;; )tFtΦ ;
(21.1.9)
if
t is variable, then it will intervene by δt in the calculation of δ
0
k
x . The last
differential is the total differential of a first integral, hence it can be expressed by a
linear combination of the forms
δ=δ
kk
xxt; the quantity (21.1.9) becomes
δδ= δ−δ(;; ;) (;; )
ii iii
xt x t Fxt x XtΦ .
(21.1.9')
In this case, the absolute integral invariant (21.1.5), which is obtained by replacing
δ
i
x
by
δ−δ
ii
xxt, is called complete absolute integral invariant. But we must notice that
the methodology to obtain complete invariants can be applied only to absolute
invariants; indeed, in case of relative invariants, the invariance of the differential form
(21.1.7) under the integral does not result from the invariance of the integral (21.1.5).
21.1.1.3 The Absolute Invariant of Order
2s . Liouville’s Theorem
We notice that (21.1.3) is an integral invariant if the condition
δ=
∫
r
2
d
(;) 0
d
s
FtV
t
D
(21.1.10)
MECHANICAL SYSTEMS, CLASSICAL MODELS
340
is fulfilled. To reach a domain
0
D which does not depend on time we effect the
transformation (21.1.2'), obtaining thus
()
()
δ= δ= + δ
∫∫ ∫
rrr
00
00
0
222
dd dd
(;) ( ;);
dd dd
sss
FJ
FtV F ttJV JF V
tt tt
DD D
.
We observe that the derivative d/dJtof the functional determinant can be written
as a sum of
2s determinants =, 1,2,...,2
i
Ii s, where
i
I is obtained from J by
differentiating the line
i ; it results (we take into account (21.1.1))
()
()
−+
⎡⎤
∂
=
⎢⎥
∂
⎣⎦
12 1 1 2
00 0
12 2
, ,..., , , ,...,
det
, ,...,
i
iis
i
s
xx x XX X
I
xx x
.
Because
=
∂
∂∂
=
∂
∂∂
∑
2
00
1
s
iik
k
k
j
j
x
XX
x
xx
,
we see that
i
I can be calculated as a sum of 2s determinants, each one having two
identical lines, excepting that determinant which corresponds to
=ki; this determinant
is equal to
δδ/
ii
JX x. Finally,
=
∂
==
∂
∑
X
2
1
d
div
d
s
i
i
i
X
J
JJ
tx
,
(21.1.11)
where
X is the 2s -dimensional vector of components
12 2
, ,...,
s
XX X .
Returning to the actual variables, it results
()
0
22
2
0
22
11
22
22
11
d
dd
dd d
d
.
d
ss
si i
ss
ii
ii
ss
ii
i
ss
ii i
ii
I
XX
FF
FJV F V
ttx tx
xX
FF
FVF FXV
txtx x
==
==
∂∂
⎛⎞⎛⎞
=+ δ=+ δ
⎜⎟⎜⎟
∂∂
⎝⎠⎝⎠
∂
∂∂ ∂
⎡⎤⎡⎤
⎛⎞
=+ + δ=+ δ
⎜⎟
⎢⎥⎢⎥
∂∂ ∂ ∂
⎝⎠
⎣⎦⎣⎦
∑∑
∫∫
∑∑
∫∫
DD
DD
Because
F is a function of class
1
C and the domain D is arbitrary, we can state
Theorem 21.1.3
2s
I is an invariant integral if the necessary and sufficient condition
()
=
∂
+=
∂
∑
2
1
0
s
i
i
i
FFX
x
(21.1.12)
is fulfilled.
Taking into account the results in Sect. 15.1.1.4 (formula 15.1.29)), it results that
F
must be a Jacobi multiplier of the system of equations (21.1.1).

Other Considerations on Analytical Methods in Dynamics of Discrete Mechanical Systems
341
If
= 1F , then the condition (21.1.12) becomes a condition of null divergence
=
∂
=
∂
∑
2
1
0
s
i
i
i
X
x
,
(21.1.13)
verified by non-divergent systems; in this case
=δδ δ
∫
2122
...
ss
xx x
D
I
(21.1.13')
is an absolute integral invariant of this system. As well,
=
d
0
d
J
t
.
(21.1.13'')
As we have seen in Sect. 19.1.1.6, the condition (21.1.13) is verified in case of
Hamilton’s system of canonical equations, so that the quantity
=δδ δδδ δ
∫
21212
... ...
ss
s
qq qpp p
D
I
,
(21.1.14)
which represents the volume of the domain
D in the phase space (the phase space is
not a metric space, because we cannot establish distances; however, we consider
volume elements which are obtained by multiplying a volume element of the space of
configurations by the corresponding volume element of the space of generalized
momenta), is an integral invariant; we can state
Theorem 21.1.4 (Liouville). The volume of a domain of possible (simultaneous) states
of a Hamiltonian system remains constants during the motion.
Let us imagine a very great number of identical actual states of a system, which
differ one from the other only by their initial states
=
00
, , 1,2,...,
ii
qpi s
; all these states
form a statistical set. Such a set may be the set of molecules of gas in a given volume.
The volume, represented by
2s
I in the space
2s
Γ , is called extension of phase;
Liouville’s theorem is thus known under the denomination of conservation theorem of
extension of phase too. Thus, Liouville’s theorem plays a fundamental rôle in the
deductions of Boltzmann’s equation in the kinetic theory of gas. If we remember the
mechanical image in Sect. 21.1.1.1 (the fictitious fluid), then we can say that “the flow
in the phase space is incompressible”.
In case of a canonical system we have
= 1J at the initial moment; from (21.1.13'')
it results that
= constJ , so that = 1J at any moment t .
21.1.2 Invariants of First Order
After some results of general character, one presents the Poincaré and the
Poincaré-Cartan invariants; we mention Hwa-Chung Lee’s theorem too. A special
attention is given to the connection between the integral invariants and the differential
forms.