Teodorescu P.P. Mechanical Systems, Volume III: Analytical Mechanics
Подождите немного. Документ загружается.


Variational Principles. Canonical Transformations
251
()
()
11
00
d2 d
2
PP
PP
U
IsUhs
Uh
δ
δδ=++
+
∫∫
.
We have
UNnδδ= , where N is the component of the field of forces along the
external normal, while
ddd/sn nsδδθδρ== , ρ being the curvature radius at the
point
P . We obtain thus
()
1
0
d
2
P
P
W
Ins
Uh
δδ=
+
∫
,
()
2 Uh
WN
ρ
+
=+
.
(20.1.68)
Writing the equation of motion along the external normal and taking into account the
mechanical energy conservation theorem, there results
2
/Nmvρ=−
()
2/Uhρ=− + , and we find again Jacobi’s form of the least action principle.
Let be a convex and closed simple curve C, and
C an analogous curve which
contains the first one. We can state
Theorem 20.1.13 (Whittaker). If a particle P which is in motion in the interior of a
ring formed by two conex and closed simple plane curves C (internal) and
C (external)
and is acted upon by conservative forces for which the potential
U has not
singularities in this ring, then it admits at least a periodic orbit if
0W < on C and
0W > on C .
20.1.4.5 Other Variational Principles
We will introduce, following V. Vâlcovici, a kinetic-potential energy
,
TU
αβ
αβ=+E
(20.1.69)
of
()
,αβ kind and a corresponding kinetic-potential action
1
0
,,
d
t
t
t
αβ αβ
=
∫
A E
(20.1.69')
of the same kind. To establish the conditions in which one can enounce an
asynchronous variational principle of the form
()
11
00
,, ,,
d
dd0
d
tt
tt
ttt
t
αβ αβ αβ αβ
ΔΔΔΔ ==+ =
∫∫
A EEE ,
we start from the general integral principle (20.1.35'), corresponding to the principle of
virtual work, the varied paths having fixed ends; subtracting the relation (20.1.35') from
the relation
()
()
1
0
d
d0
d
t
t
TUTU tt
t
αΔ βΔ α β Δ+++ =
∫
,
we find the condition
MECHANICAL SYSTEMS, CLASSICAL MODELS
252
()
()
()
[]
{
}
1
0
dd
12d0
dd
t
t
T
TUWP t TU tt
tt
αΔβΔΔ Δ α β Δ−+−+− +−+ =
∫
,
(20.1.70)
which allows the determination of the function
tΔ . In case of catastatic constraints
(
d/dPTt= ) and of quasi-conservative given forces ( WUUtΔΔ Δ=−
), we obtain
a much more simple form, i.e.
()
()
()
[]
{
}
1
0
d
11 2 d0
d
t
t
TUUtTUtt
t
αΔ βΔ Δ α β Δ−+−++−+ =
∫
.
(20.1.70')
If the given forces are conservative (
0U =
), then we can write a mechanical energy
conservation theorem (
ETUh=−=), so that the condition (20.1.70') becomes
()
()
()
()
[]
{
}
1
0
d
1222d0
d
t
t
hUhUtt
t
α Δ αβ Δ α αβ Δ−++− +−++− =
∫
,
(20.1.70'')
where we assumed that along a varied path we have
EEhhΔΔ+=+. Supposing
further that we have to do with isoenergetic varied paths (
0hΔ = ), this latter condition
has the form
()
()
()
1
0
0
1
2d 2 0
t
t
Ut h t tαβ Δ α Δ Δ+− + − − =
∫
(20.1.71)
or the form
()
()
[]
1
0
22d0
t
t
UhtΔαβ α+− + − =
∫
.
(20.1.71')
We can thus state
Theorem 20.1.14 Among all possible motions of a mechanical system, subjected to
catastatic, ideal constraints and acted upon by conservative given forces, on
asynchronous varied isoenergetic paths with fixed ends, only and only the motion (of
the representative point on the true curve) which makes stationary the action
,αβ
A
with the condition (20.1.71') takes place.
Obviously, in this case too, starting from this theorem, one can obtain a
corresponding variational principle.
In particular, for
2α = and
0β =
we find again the Theorem 20.1.10 of
Maupertuis. As well, for
1αβ== and
01
ttΔΔ= we find a particular form of
Voss’s principle; but we observe that, if we make
1αβ== in the condition
(20.1.70'), then we arrive at the form considered in Sect. 20.1.3.2.
Taking
0α =
and 2β = , as well as
01
ttΔΔ= , we obtain an asynchronous least
potential principle stated first by V. Vâlcovici and afterwards, in general conditions, by
P.P. Teodorescu) (the same duration on all varied paths)
Variational Principles. Canonical Transformations
253
1
0
d0
t
U
t
UtΔΔ==
∫
A .
(20.1.72)
To can formulate a least mechanical action principle in the form
1
0
d0
t
E
t
EtΔΔ==
∫
A ,
(20.1.73)
we must have
constE ≠ ; starting from the condition (20.1.70') and making
0αβ+=, we find (ETU=−, TU=+L )
()()
11
00
dd
d2d0
dd
tt
tt
EE tt Ut T tt
tt
αΔ Δ ΔΔ Δ++−− =
∫∫
L .
The first variation vanishes, so that we can have a least mechanical action principle if
the condition
()
11
00
d
d2d
d
tt
tt
Utt T t t
t
ΔΔ Δ=+
∫∫
L
(20.1.73')
is verified; we find a more intricate relation (specifying
tΔ as a function of t ) as in the
previous case.
20.1.4.6 Larmor’s Principle
If some ignorable co-ordinates which not appear in the kinetic potential L do exist
(see Sect. 18.2.3.6), we can state a variational principle, in the frame of which appears a
functional which becomes stationary on a certain class of varied paths. We have thus to
do with a holonomic mechanical system with
s degrees of freedom, in which the first
r generalized co-ordinates are ignorable. Let thus be the functional
1
0
1
d
d
d
r
t
k
t
k
k
qt
tq
=
∂
⎛⎞
−
⎜⎟
∂
⎝⎠
∑
∫
L
L
.
Using the relation (20.1.43'''), we obtain the variation of this functional in the form
1
1
0
0
1
t
t
r
j
kk
j
kk
k
t
t
qt qq
qqq
ΔΔ Δ Δ
=
∂∂∂
⎡⎤
⎡
⎛⎞⎤
−− +
⎜⎟
⎢⎥
⎢
⎥
∂∂∂
⎣
⎝⎠⎦
⎣⎦
∑
E
LLL
1
0
11
t
sr
j
k
j
k
jr k
t
qtq
qq
ΔΔ Δ
=+ =
⎡⎤
∂∂
⎛⎞
=−−
⎜⎟
⎢⎥
∂∂
⎝⎠
⎣⎦
∑∑
LL
E
.
The varied motion will be subjected to the restrictions (18.2.79'), with the same
constant as in the true motion. In this case (we calculate the derivative
d/dt under the
integral sign)
1
1
0
0
11
d
t
rs
t
j
k
t
j
k
kjr
t
qt q t
qq
ΔΔΔ
==+
⎡
⎤
∂∂
⎛⎞
−= −
⎢
⎥
⎜⎟
∂∂
⎝⎠
⎣
⎦
∑∑
∫
LL
LE
.

MECHANICAL SYSTEMS, CLASSICAL MODELS
254
By means of the relations (18.2.79') and by the normal procedure, we can express the
above integrand as a function of the constants
12
, ,...,
r
CC C and of the generalized
velocities
12
, ,...,
s
rr
qq q
++
, obtaining thus the function R of Routh, which depends on
the palpable co-ordinates
12
, ,...,
s
rr
qq q
++
.
Fixing the palpable co-ordinates at the ends of the time interval (not also the
ignorable co-ordinates) and fixing the initial and the final times (
01
0ttΔΔ==),
there results
11
00
1
dd0
r
tt
Rk
tt
k
k
Rt q t
q
ΔΔ Δ
=
∂
⎛⎞
==− =
⎜⎟
∂
⎝⎠
∑
∫∫
L
AL
.
(20.1.74)
We may state
Theorem 20.1.15 (Larmor). Among all possible motions of a generalized conservative
mechanical system, subjected to ideal constraints, acted upon by quasi-conservative
given forces, on asynchronous varied paths with fixed ends (in space, for the palpable
co-ordinates, and in time), only and only the motion (of the representative point on the
true curve) which makes stationary the Routhian action (20.1.74) takes place.
This result can be considered as a generalization of the Theorem 20.1.8 and may be
used as a variational principle: Larmor’s principle.
Starting from this principle, we obtain – in the usual way – Routh’s equations.
20.1.5 Continuous Mechanical Systems
After some results with a general character, we consider some particular mechanical
systems; we will thus present the basic equations in the motion of strings, of straight
bars and of linear elastic solids.
We used till now analytical methods of calculus only to study discrete mechanical
systems (with a finite number of degrees of freedom); in case of an infinite number of
degrees of freedom, the problems impose a specific treatment. For instance, in case of
vibrations of an elastic solid, every one of its point participates at this motion; the
motion may be described only if all parameters which indicate the position of each
point are involved.
20.1.5.1 Lagrangian Formalism
To put into evidence the treatment of the problem, we will start from a continuous
mechanical system, which will be studied – at the beginning – by discrete methods in a
Lagrangian formalism.
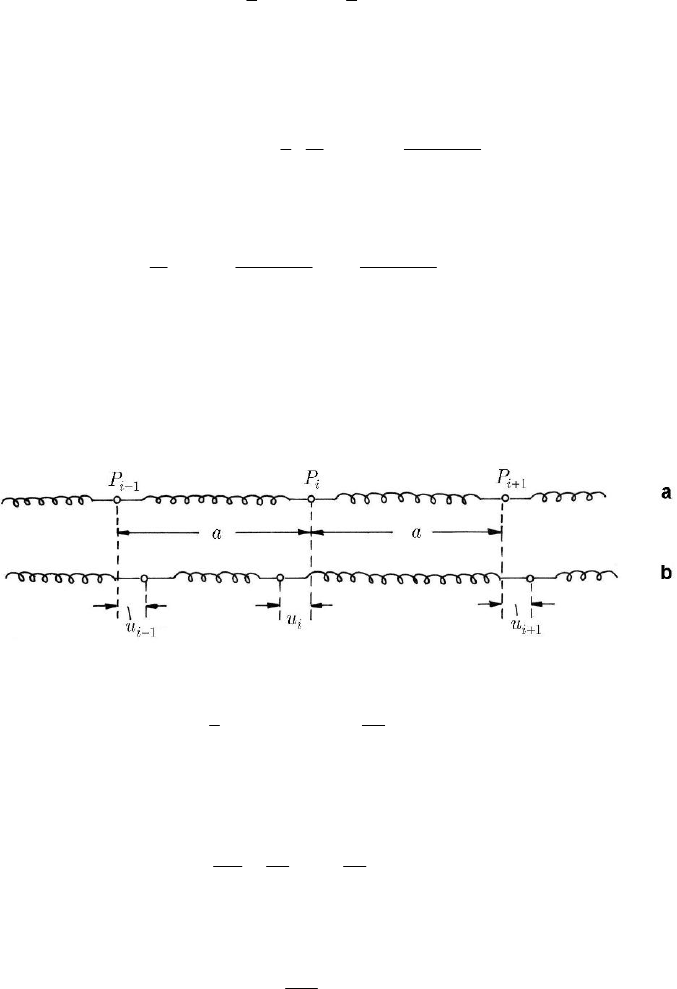
Let be a linear elastic, isotropic and homogeneous straight bar (see Sect. 12.1.1),
subjected to longitudinal small motions; it can be approximated (mathematically
modelled) by a discrete system of particles
i
P of equal masses m along the axis,
separated at equal distances
a (in a position of equilibrium) by springs of elastic
constants
k (Fig. 20.4a); during the motion, the particle
i
P has a displacement
i
u
along the bar axis, so that
()
ii
uut= (Fig. 20.4b). As a matter of fact, we study thus a
linear polyatomic molecule (case in which the number of particles is finite). We obtain
thus the Lagrangian
Variational Principles. Canonical Transformations
255
()
2
2
1
11
22
ii
i
ii
TU mu ku u
+
=+= − −
∑∑
L ,
the forces which act on those particles (because of the springs at left and right) being
()()
11
ii i
ii
Fkuu kuu
−+
=− − + − . We may also write
i
i
a=
∑
LL,
(
)
2
1
2
1
2
i
i
ii
uu
m
uka
aa
+
−
⎡
⎤
=−
⎢
⎥
⎣
⎦
L ;
there result Lagrange’s equations
11
22
0
ii
ii
i
uu uu
m
uka ka
a
aa
+−
−−
−+=
.
In a process of passing to limit, /ma tends to the density μ ,
()
1
/
i
i
uua
+
− tends to
the linear strain
ε ,
i
F tends to the force F , while k tends to the rigidity of axial
forces
EA , where E is the longitudinal elasticity modulus and A is the area of the
cross section (
FEAε= ). In this case, the kinetic potential will be (for a bar of length
l )
Fig. 20.4 Discrete model of a linear elastic, isotropic, homogeneous straight bar
()
2
2
0
1
dd
2
l
u
xuEAx
x
μ
∞
−∞
∂
⎡
⎤
=−
⎢
⎥
∂
⎣
⎦
∫∫
L ,
(20.1.75)
where
()
;uuxt=
and x is the abscissa along the bar axis; observing that, by passing
to the limit,
() ()
xxa
EA u u
ax x
−
∂∂
⎡
⎤
−
⎢
⎥
∂∂
⎣
⎦
leads to
()
22
/EA u x∂∂, we find the equation of motion
2
2
0
u
uEA
x
μ
∂
−=
∂
.
(20.1.75')
So, characteristic aspects of passing from discrete to continuous systems are put in
evidence. As one can see, the position co-ordinate
x is not a generalized one; it plays
MECHANICAL SYSTEMS, CLASSICAL MODELS
256
the rôle of a continuous index, replacing the numerable index
i . As to every index i
corresponds a generalized co-ordinate
i
u , so to every x corresponds a generalized co-
ordinate
()ux ; taking into account also the dependence on time, we must have
()
;uuxt=
. In the above conditions, L is – in fact – a Lagrangian density; in what
follows we will use the notation
L (as for the Lagrangian), because only the
Lagrangian density plays a rôle in describing the motion of the mechanical system.
The motion of a three-dimensional continuous mechanical system, which occupies
the domain
Ω , will be described – in general – by means of the Lagrangian
d
Ω
Ω
∫
L ,
()
123 123
,,,,;,,;uu u u ux x x t= LL ,
(20.1.76)
where L is the Lagrangian density, while /
ii
uux=∂ ∂ , 1,2,...,in= , /uut=∂ ∂
,
123
,,,xxxt being independent variables. Hamilton’s principle in a synchronous case is
written in the form
1
0
dd0
t
t
t
Ω
δΩ=
∫∫
L .
(20.1.76')
We notice that, in this case, the parameters
123
,,,xxxt have not variations, the
variation process having no influence neither on the integration domain
Ω , nor on the
integration limits with respect to time; thus,
uδ will vanish on Ω∂ as well as for
0
t
and
1
t . On the basis of the results in Sect. 20.1.1.3, we can write Euler-Ostrogradskiĭ
equations
dd
0
dd
ii
tu x u u
∂∂∂
⎛⎞
⎛⎞
+−=
⎜⎟
⎜⎟
∂∂∂
⎝⎠
⎝⎠
LLL
,
(20.1.77)
where we use the summation convention of dummy indices. Instead of
s differential
equations of second order for a discrete mechanical system, in case of a continuous one
we find a partial differential equation in four variables:
123
,,xxx, and t . In general,
we may have several types of displacements
()
123
,,;uuxxxt
αα
= ,
1,2,...,mα =
;
for instance, in case of vibrations of an elastic solid we have
3m = . One obtains the
equations of motion
dd
0
dd
ii
tu x u u
ααα
∂∂∂
⎛⎞
⎛⎞
+−=
⎜⎟
⎜⎟
∂∂∂
⎝⎠
⎝⎠
LLL
, 1,2,...,mα = .
(20.1.78)
Introducing the functional derivative (the variational derivative – an extension of the
Euler–Lagrange derivative)
d
d
i
i
uu u
x
αα α
δ
δ
∂∂
=−
∂∂
(20.1.79)
and observing that
//uu
αα
δδ=∂ ∂LL,
1,2,...,mα =
, we can write the equations
of motion also in the form
Variational Principles. Canonical Transformations
257
d
0
dtu u
αα
δδ
δδ
⎛⎞
−=
⎜⎟
⎝⎠
LL
,
1,2,...,mα =
,
(20.1.79')
similar to that of Lagrange’s equations.
20.1.5.2 Hamiltonian Formalism
To put in evidence the possibility of using the Hamiltonian formalism, we take again
the example considered at the preceding subsection by discretization. We introduce thus
the generalized momenta
i
i
ii
pa
uu
∂
∂
==
∂∂
L
L
and build up the Hamiltonian
ii
ii i i i
ii
ii i
Hpu au au
uu
∂∂
⎛⎞
=−= −= −
⎜⎟
∂∂
⎝⎠
∑∑ ∑
LL
LL L
.
Using the same process of passing to limit and introducing the Lagrangian density
L ,
we obtain the Hamiltonian
dHux
u
∞
−∞
∂
⎛⎞
=−
⎜⎟
∂
⎝⎠
∫
L
L
;
we are thus led to use further the notion of density.
In the motion of a three-dimensional continuous mechanical system which occupies
the domain
Ω and the position of which is specified by m generalized co-ordinates
()
123
,,;uuxxxt
αα
= , 1,2,...,mα = , we introduce the generalized momenta
density
u
α
α
π
∂
=
∂
L
,
(20.1.80)
hence, the Hamiltonian density
1
m
u
αα
α
π
=
=−
∑
H
L ,
(20.1.81)
of the form
()
123 123
,,,,,;,,;uuuuu xxxt
αααααα
π=
H
H . Hamilton’s function is
thus given by
1
dd
m
Hu
αα
ΩΩ
α
Ωπ Ω
=
⎛⎞
== −
⎜⎟
⎝⎠
∑
∫∫
HL,
(20.1.81')
so that
MECHANICAL SYSTEMS, CLASSICAL MODELS
258
1
dddddd
m
i
i
Hu ut
uu
ααα
ααα
Ω
α
πΩ
π
=
∂∂
⎡⎤
⎛⎞
=+++
⎜⎟
⎢⎥
∂∂∂
⎝⎠
⎣⎦
∂
∑
∫
HHH
H
.
Integrating by parts and using the same procedure as in Sect. 20.1.1.3, we obtain
1
d
dddddd
d
m
i
ii
Hu ut
uxu
αα α
αα α
Ω
α
πΩ
π
=
∂∂ ∂
⎧⎫
⎡⎛⎞⎤
=+++
⎨⎬
⎜⎟
⎢⎥
∂∂ ∂
⎣⎝⎠⎦
⎩⎭
∑
∫
HH H
H
1
dddd
m
ut
u
αα
αα
Ω
α
πΩ
π
=
∂∂
⎡⎤
⎛⎞
=++
⎜⎟
⎢⎥
∂∂
⎝⎠
⎣⎦
∑
∫
HH
H
,
where we used the notation (20.1.79) and observed that //
αα
δδπ π=∂ ∂HH. If we
differentiate, starting from the second form (20.1.81'), we can write (we use the
functional derivative)
1
d d+ddddd
m
Huuuut
uu
αα αα α α
αα
Ω
α
δδ
ππ Ω
δδ
=
⎡⎤
⎛⎞
=−−−
⎜⎟
⎢⎥
⎝⎠
⎣⎦
∑
∫
LL
L
;
the notation (20.1.80) and the equations (20.1.79'), written in the form
=
u
α
α
δ
π
δ
L
, =
u
α
α
δ
π
δ
L
,
(20.1.82)
lead to
()
1
ddddd
m
Huut
αα αα
Ω
α
ππ Ω
=
⎡⎤
=−+−
⎢⎥
⎣⎦
∑
∫
L .
Comparing the two expressions of
dH , we find the equations of motion
u
α
α
δ
δπ
=
H
,
u
α
α
δ
π
δ
=−
H
,
(20.1.83)
analogue to Hamilton’s equations, as well as the relation
=−
H
L
.
(20.1.83')
In a developed form, we have
u
α
α
π
∂
=
∂
H
,
d
d
ii
uxu
α
αα
π
∂∂
⎛⎞
=− +
⎜⎟
∂∂
⎝⎠
H
H
,
(20.1.83'')
obtaining a form which has no more a symmetric character.
The canonical form of Hamilton’s synchronous principle will be
()
1
0
123 123
1
,,,,;,,; dd 0
m
t
t
u uuuu xxxt t
αα ααααα
Ω
α
δπ π Ω
=
⎡⎤
−=
⎢⎥
⎣⎦
∑
∫∫
H .
(20.1.84)
Variational Principles. Canonical Transformations
259
We may calculate
1
d
d
d
m
H
u
tu
αα
αα
Ω
α
πΩ
π
=
∂∂
⎡⎤
⎛⎞
=++
⎜⎟
⎢⎥
∂∂
⎝⎠
⎣⎦
∑
∫
HH
H
;
with the aid of the equations of motion (20.1.83) we observe that, along the
corresponding integral curves, we obtain
d
d
d
H
t
Ω
Ω=
∫
H
.
(20.1.85)
Hence, the Hamiltonian
H is conserved in time if the Hamiltonian density
H
does
not depend explicitly on time (
0=
H
).
In general, let be the functional
dF
Ω
Ω=
∫
F ,
(20.1.86)
where
()
123 123
,,,,,;,,;uuuuu xxxt
αααααα
π= FF . We can write
1
d
d
d
m
F
u
tu
αα
αα
Ω
α
πΩ
π
=
∂∂
⎡⎤
⎛⎞
=++
⎜⎟
⎢⎥
∂∂
⎝⎠
⎣⎦
∑
∫
FF
F
;
taking into account the equations of motion (20.1.83), there results
1
d
d
d
m
F
tu u
αα αα
Ω
α
δδ δδ
Ω
δδπ δπδ
=
⎡⎤
⎛⎞
=−+
⎜⎟
⎢⎥
⎝⎠
⎣⎦
∑
∫
FH FH
F
.
(20.1.87)
We observe thus that we obtain a quantity similar to the Poisson bracket; using an
analogous notation, we may write
()
d
,d
d
F
t
Ω
Ω
⎡⎤
=+
⎣⎦
∫
FH F
.
(20.1.87')
We may thus affirm that
F is conserved in time if simultaneously
()
,0=FH and
0=
F
; one can also say that F is a constant of motion. The conservation theorems
for integral quantities can be obtained as in the previous chapter, and one can develop
analogous methods of calculation. But we must observe that, besides the theorems
concerning “macroscopic” constants of integration (for integral quantities), one can
state theorems for “microscopic” such constants (for densities); the latter results are of a
special interest in mechanics of continuous deformable media.
We remark that all the above considerations may be used also for a field description
with the aid of variational principles (even in the absence of a mechanical system).
20.1.5.3 Motion of Linear Elastic Solids
To determine the density
L of the Lagrangian in case of a linear elastic solid, we
must calculate the densities
T and V of the kinetic energy, and of the potential energy,
respectively, so that
MECHANICAL SYSTEMS, CLASSICAL MODELS
260
dT
Ω
Ω=
∫
T
,
dV
Ω
Ω=
∫
V
;
(20.1.88)
to do this, we need some preliminary considerations.
Let
()
000
0
123
,,;fxxxt be a function of class
1
C , expressed by means of material co-
ordinates; using spatial co-ordinates, we obtain the function in the form
()
123
,,;fxx x t (see Sect. 12.1.1.1). The partial derivative of first order with respect to
one of the variables, e.g. the variable
0
1
x , is written in the form
123
00 0 00
123
11 1 11
1
k
k
x
uuu
ff f f f
xx xx
xx x xx
∂
∂∂∂
∂∂ ∂ ∂ ∂
⎛⎞
==+++
⎜⎟
∂∂ ∂∂
∂∂ ∂ ∂∂
⎝⎠
,
(20.1.89)
where we took into account (12.1.3''),
j
u ,
1, 2, 3
j
=
, being the components of the
displacement vector; neglecting the displacement gradient (the tensor
0
1
/
ij j
uxα =∂ ∂ ,
,1,2,3ij=
) with respect to unity, one has
0
0
1
1
f
f
x
x
∂
∂
=
∂
∂
.
(20.1.89')
Hence, in this case, we obtain the same results, in the same form, either we use material
or spatial co-ordinates.
The symmetric part of the tensor
ij
α is the strain tensor (
(,)
ij
ij
uε =
()
,,
(,)
/2
ij ji
ij
uu α=+ =); if ij= one obtains the linear strains, while if ij≠ ,
2
ij ij
γε= , ,1,2,3ij= , represent the angular strains. The hypothesis of neglecting
the displacement gradient with respect to unity includes thus the case of infinitesimal
deformations, case in which the relations between strains and displacements are linear.
The antisymmetric part of the tensor
ij
α
is the local rotation of rigid body tensor
(
[,]
ij
j
i
uω =
()
,,
[,]
/2
ji ij
ij
uu α=− =) is also neglected with respect to unity (as the
displacement gradient). We may thus speak about a linear theory from a geometric
point of view (case in which relations of the form (20.1.89') hold).
Taking into account the notions introduced in Sect. 12.1.1.1, from relations (12.1.2'')
and (12.1.3'') we obtain the velocity and the acceleration (in spatial description)
d
d
j
j
v
tx t
∂∂
== +
∂∂
uu u
v
,
2
2
dd
d
d
j
j
v
txt
t
∂∂
== = +
∂∂
vuv v
a
(20.1.90)
for a point of the solid; the vector
0
r (corresponding to the initial moment) is constant.
Neglecting the non-linear terms, we remain with the displacement velocity (neglecting
the spatial derivative, the total derivative is reduced to the time one)
t
∂
==
∂
u
vu
(20.1.90')