Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

15 Dynamics of the Rigid Solid with a Fixed Point
0
()tθθ= ,
(15.2.14'')
where
0
θ
is the nutation at the initial moment
0
tt=
. In this case, the relations (5.2.35)
give the components of the vector
ω along the axes of the movable frame of reference
R in the form
()
()
00
1000
() sin sintttωωθω ϕ
′
=−+,
()
()
00
2000
() sin costttωωθω ϕ
′
=−+
,
00
30
() costωωθω
′
=+
.
(15.2.15)
Knowing the components of the tensor of inertia
O
I with respect to the frame R, the
formulae (15.1.11') allow to calculate the moment of the given forces with respect to the
pole
O, characterizing thus the loading which leads to the considered motion.
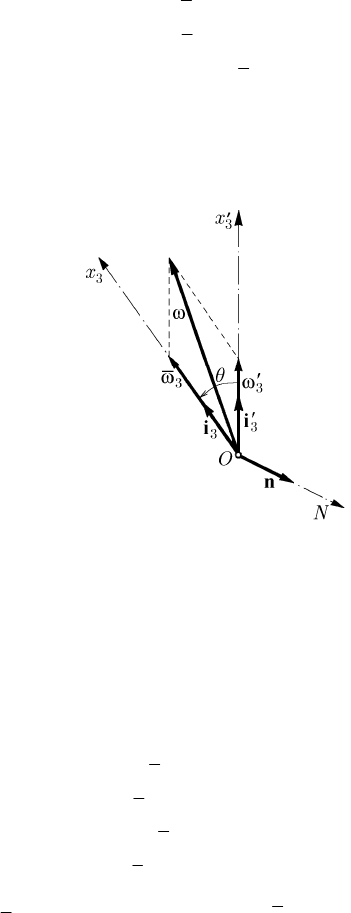
Fig. 15.22 Canonical decomposition of the vector ω in the problem of the regular
precession in the general motion of a rigid solid with a fixed point
In the particular case in which the
3
Ox -axis is a principal axis of inertia of the rigid
solid
S with respect to the pole O (if
31 32
0II==), we can assume that the axes
1
Ox and
2
Ox are the other principal axes of inertia. Replacing the components of the
vector
ω in the relations (15.1.11'') of Euler, we find the components of the moment
O
M in the form
()()
[
]
000
123 23 0
1
() cos
O
Mt I I I I Iωωθω
′′
=−+ −−
()
()
0
000
sin cos ttθω ϕ⋅−+
,
()()
[
]
000
231 13 0
2
() cos
O
Mt I I I I Iωωθω
′′
=− + + − −
()
()
0
000
sin sin ttθω ϕ⋅−+
,
()
()
()
()
2
02 0
12 0 0 0
3
1
() sin sin2
2
O
Mt II ttωθω ϕ
′
=− − − + .
(15.2.16)
353
MECHANICAL SYSTEMS, CLASSICAL MODELS
If the ellipsoid of inertia is an ellipsoid of rotation with respect to the
3
Ox -axis (a
prolate spheroid for which
12
IIJ==), then we are led to
()
[
]
()
()
0000
3300 00
1
( ) cos sin cos
O
Mt I JI ttωωθωθωϕ
′′
=−− −+,
()
[
]
()
()
0000
3300 00
2
() cos sin sin
O
Mt I JI ttωωθωθωϕ
′′
=− − − − +
,
3
() 0
O
Mt= .
(15.2.17)
In this case, the moment
O
M is in the plane
12
Ox x (hence,
O
⊥ ωM ) and one can
easily see that
0
i
OOi
M ω⋅= =ωM (hence
O
⊥ ωM , so that we have
O
′
⊥ ω
M
too); hence, the moment
O
M is directed along the line of nodes ON (Fig. 15.22) and
we can write
()
0
00
33 0 0
0
() cos sin
O
tIJI
ω
θωω θ
ω
′
⎡⎤
′
=−−
⎢⎥
⎣⎦
Mn
()
0
33 0
0
cosIJI
ω
θ
ω
′
⎡⎤
′
=−− ×
⎢⎥
⎣⎦
ωω.
(15.2.17')
If the support of the angular velocity vector
ω is close to the
3
Ox -axis, it results that –
in a first approximation – one can neglect the ratio
00
/ωω
′
with respect to unity. We
get thus
3
()
O
tI
′
=×ωωM ,
(15.2.17'')
a formula useful in various applications; this formula can be used also if
()
33
/1JI I−<<, becoming an exact one if the ellipsoid of inertia is a sphere.
15.2.1.5 Geometric Representation of the Motion. Jacobi’s Theorem
The first integrals (15.2.1'), (15.2.1'') which appear in the motion of the rigid solid
S
with a fixed point, in the Lagrange-Poisson case, may be written also in the form
0
11 22 3
auωα ωα ω α++=
,
22
12
buωω β+=−
,
0
33
ωω=
,
(15.2.18)
using the notions previously introduced. Let be, as well, a rigid solid
Σ which has a
motion of constant rotation
()
00
33
ωω− i ,
0
constω = , about the axis of dynamical
symmetry of the rigid solid
S; if ω is the angular velocity of the rigid solid Σ with
respect to the inertial frame of reference
′
R , then we have
11
ωω= ,
22
ωω= ,
()
000 0
33 3
ωω ωω ω=+ − =. We choose the angular velocity
0
3
ω so as to have
00
33 3
IJωω= ; in these conditions, the first integrals (15.2.18) become
354

15 Dynamics of the Rigid Solid with a Fixed Point
0
11 22
uωα ωα ω α++=,
22
12
buωω β+=−,
0
3
ωω= ,
(15.2.18')
where we have introduced a new constant
()
2
02
33
2/hI aJβω
⎡
⎤
=−
⎣
⎦
. If, in
particular, the ellipsoid of inertia at the fixed point, in the Lagrange-Poisson case, is a
sphere, then we have
1a = , the first integrals (15.2.18), (15.2.18'), corresponding to
the motion of the rigid solid
S or of the rigid solid Σ, respectively, having the same
form.
The motion of the rigid solid
Σ, considered independent of the rigid solid S, takes
place as it would be acted upon by its own weight, its ellipsoid of inertia being a sphere.
We can thus state that, in general, the motion of a heavy rigid solid with a fixed point,
in the Lagrange-Poisson case, may be obtained by the composition of the motion of a
heavy rigid solid for which the ellipsoid of inertia is a sphere with a motion of constant
rotation about the axis of symmetry of the ellipsoid of inertia of the considered rigid
solid. Research concerning the geometric representation of the motion is due to C.G.J.
Jacobi, E. Lottner, J.J. Sylvester, N.B. Delone etc.
Using the theory of conjugate motions in the sense of Darboux, one can show that
the motion of a heavy rigid solid
Σ with a fixed point, for which the ellipsoid of inertia
is a sphere, may be obtained by the composition of a motion of Poinsot type with an
inverse motion of Poinsot type. The demonstration of this theorem is particularly
arduous; one puts in evidence, in a constructive form, the two motions, with arbitrary
initial conditions.
We notice that the motion of rotation of the rigid solid
S with respect to the rigid
solid
Σ may be considered as a motion of rotation about the normal to the fixed rolling
plane in the motion of Poinsot type, component of the motion of the rigid solid
Σ.
Taking into account Sylvester’s theorem (see Sect. 15.1.2.10), we can show that, by the
composition of the motion of rotation considered above with a motion of Poinsot type,
one obtains a motion of Poinsot type too. The previous results allow to state
Theorem 15.2.2 (Jacobi) In general, the motion of a heavy rigid solid with a fixed
point, in the Lagrange-Poisson case, can be obtained by the composition of a motion of
Poinsot type with an inverse motion of Poinsot type.
Studies in this direction have been made by E. Padova, G.H. Halphen, G. Darboux,
W. Hess, E.J. Routh, R. Marcolongo, A.G. Greenhill and F. Kötter too.
15.2.2 The Sonya Kovalevsky Case
In 1888, a century after Lagrange’s researches of 1788, Sonya Kovalevsky has been
awarded by the Academy of Sciences of Paris for her studies concerning what we call
now the Sonya Kovalevsky case (considered as the IIIrd case of integrability). In this
case, the ellipsoid of inertia is of rotation, the centre of mass
C is situated in its
equatorial plane, the squares of the semi-axes in this plane being half of the square of
the semi-axis corresponding to the axis of symmetry (
12 3
2II I== ,
3
0ρ = , the
ellipsoid of inertia being a prolate spheroid); without any loss of generality (the axes in
355
MECHANICAL SYSTEMS, CLASSICAL MODELS
the equatorial plane are equivalent from the point of view of the properties of inertia),
we can assume that
2
0ρ = , the centre C being thus situated on the
1
Ox -axis.
After obtaining the fourth first integral found by Kovalevsky, one passes to the
systematic determination of the components of the angular velocity vector
ω and to the
specification of the position of the rigid solid with respect to the inertial frame of
reference.
15.2.2.1 First Integrals of the Motion
In the Sonya Kovalevsky case, the equations (15.1.21) read
123
20ωωω−=
,
231 3
2ωωωγα+=
,
32
ωγα=−
, (15.2.19)
with
13
/constMg Iγρ==, while the first integrals (15.1.42)–(15.1.44) take the
form
()
11 22 33
22ωα ωα ωα Ω++=,
()
()
22 2
12 3 1
22ωω ω γαγ++=− −
,
222
123
1ααα++=,
(15.2.20)
where we have introduced the constants
3
3
/
O
KIΩ
′
′
=
,
3
/hIγ = .
Amplifying the second equation (15.2.19) by
i1=− and summing with the first of
these equations, we obtain
()()
12 312 3
d
2iiii
dt
ωω ωωω γα++ +=
.
Proceeding analogously with the equations (14.1.54), we may write
()()()
12 312 312
d
ii ii i
dt
αα ωαα αωω++ += +
.
If we eliminate
3
α between these relations, then we get
()() ()()
22
12 12 312 12
d
iiiii
dt
ω ω γα α ω ω ω γα α+−+=− +−+
⎡⎤⎡⎤
⎣⎦⎣⎦
or
()()
2
12 12 3
d
ln i i i
dt
ωω γαα ω+−+=−
⎡⎤
⎣⎦
.
Replacing
i by −i, we obtain an analogous relation; eliminating
3
ω between this relation
and the previous one, it results
()()()()
22
12 12 12 12
d
ln i i i i 0
dt
ωω γαα ωω γαα+−+ −−−=
⎡⎤⎡⎤
⎣⎦⎣⎦
.
356
15 Dynamics of the Rigid Solid with a Fixed Point
Integrating, we get a fourth algebraic first integral (the Kovalevsky integral)
()()()()
22
2
12 12 12 12 0
iiiiωω γαα ωω γαα γ+−+ −−−=
⎡⎤⎡⎤
⎣⎦⎣⎦
,
0
constγ = ,
(15.2.21)
which can be written also in the form (separating the real parts from the imaginary ones
in the right parentheses, one obtains a product of sum by difference)
()
()
2
2
22 2
12 1 12 2 0
2ωωγα ωωγα γ−− + − =.
(15.2.21')
The constants
γ,
γ
and
0
γ introduced above have the dimension of an angular
acceleration, while the constant
Ω has the dimension of an angular velocity.
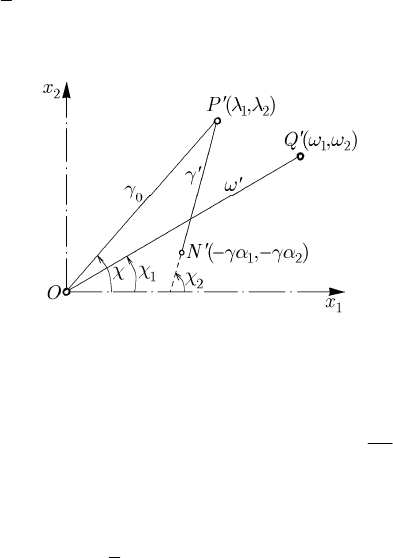
Fig. 15.23 The angle χ in the Sonya Kovalevsky case of integrability
Introducing the notations
22
112 1
λωωγα=−−,
2122
2λωωγα=−,
2
3
2
31
2
2
ω
λω=+
,
(15.2.22)
we can express the first integral of the mechanical energy and the Kovalevsky integral
in the form
31
λλ γ−=,
22 2
12 0
λλ γ+=.
(15.2.22')
We notice thus that the trajectory of the representative point
P of co-ordinates
123
,,λλλ
is the intersection of a circular cylinder with a plane, hence an ellipse. The
components of the velocity of this point are
132
λωλ=
,
231
λωλ=−
,
332
λωλ=
,
(15.2.22'')
where we took into account the equations (14.1.54) and (15.2.19); therefore, we obtain
()
22 2
12 12 3 1 2 0 3
λλ λλ ω λ λ γ ω−=− +=−
. Projecting the point P along the generatrix
of the cylinder at
P
′
, on the plane
12
Ox x , we introduce the angle χ made by the radius
357

MECHANICAL SYSTEMS, CLASSICAL MODELS
OP
′
with the
1
Ox -axis (Fig. 15.23); observing that
21
tan /χλλ= and differentiating
with respect to time (we have
()
2
d tan /d 1 tantχχχ=+
), we get
3
χω=−
. (15.2.22''')
Hence, the motion of the point
P
′
takes place as this one would be at the end of a rigid
bar of length
a, articulated at the fixed point, in the equatorial plane (considered to be
perfectly smooth) of the ellipsoid of inertia. The point would participate to the rotations
1
ω and
2
ω , without being involved in the rotation
3
ω ; the angular velocity of the bar
with respect to the rigid solid is thus
33
ω− i .
Let
N be the extremity of the vector
3
γ
′
− i and N
′
the projection of this point on the
12
Ox x
-plane; in this case,
11 2
cosλγα γ χ
′
+= ,
22 2
sinλγα γ χ
′
+= , where
||NPγ
′′′
=
, while
()
21
,NP Oxχ
′′
=
. As well, let Q be the extremity of the vector
ω applied at O and
Q
′
its projection on the
12
Ox x
-plane; denoting ||OQω
′′
=
and
()
11
,OQ Oxχ
′
=
, it results
2
12
cos2 cosωχγχ
′′
=
,
2
12
sin 2 sinωχγχ
′′
=
. One
obtains thus
2
ωγ
′′
=
,
12
2χχ= .
(15.2.23)
The third relation (15.2.22) and the relations (15.2.23) allow to write
()
2
33 2
221cosωλγ χ
′
=− +
.
(15.2.23')
Using the relations (5.2.35), (5.2.36), we may express the first two first integrals
(15.2.20) by means of Euler’s angles; we get
()
2
2 sin cos cos 2ψθϕψθθΩ++ =
,
()
()
()
2
22
2sin cos2sinsinθψ θ ϕψ θ γ θ ϕγ+++=− −
.
(15.2.24)
As well, the Kovalevsky first integral may be written in the form
()
2
222
sin cos 2 2 sin sin 2 sin sinθψ θ ϕθψθ ϕγθϕ−+−
⎡
⎤
⎣
⎦
()
2
222 2
0
2 sin cos2 sin sin 2 sin cosθψ θ ϕ θ ψ θ ϕ γ θ ϕ γ+−−−=
⎡⎤
⎣⎦
,
wherefrom
()()
2
222 222
sin 2 sin sinθψ θ γθψ θ ϕ++−
⎡
⎣
22 2
0
2 sin cos sin sinθψ θ ϕ θ γ θ γ−+=
⎤
⎦
.
(15.2.24')
358
15 Dynamics of the Rigid Solid with a Fixed Point
Thus, we have at our disposal three differential equations for the three unknown
functions (Euler’s angles).
The system of equations (14.1.54), (15.2.19) contains the time only under the
differential operator; taking into account the results in Sects. 15.1.1.4 and 15.1.1.5, we
can affirm that this system, of the form (15.1.22), may be replaced by a system of only
five differential equations, of the form (15.1.24), for which we know the four first
integrals (15.2.20), (15.2.21'). Using Jacobi’s last multiplier theory, one obtains the fifth
first integral. Hence, the complete system of first integrals of the system of equations
(14.1.54), (15.2.19) is obtained with the aid of two quadratures. Euler’s angles
θ and ϕ
are then given by the relations (5.2.36) in the form
3
arc cosθα= ,
1
2
arctan
α
ϕ
α
= ,
(15.2.25)
while the angle
ψ results from the third relation (5.2.35) (we use the equations (14.1.54)
and the first first integral (15.2.20))
()
12 21
33
22
3
12
11
cos
αα αα
ψωϕω
θα
αα
−
⎛⎞
=−=−
⎜⎟
+
⎝⎠
()
33 3
11 22
22 2 2
12 3
/2 /2 cos
1sin
Ωωα Ω ω θ
αω αω
αα α θ
−−
+
===
+−
,
(15.2.25')
by a quadrature.
The general problem put by Sonya Kovalevsky has been considered again by N.E.
Jukovskiĭ, G.K. Suslov, F. Kötter, G.V. Kolosov and W. von Tannenberg; the particular
case
0
0γ = has been studied by N.B. Delone, G.G. Appelrot and B.K. Mlodzevenski.
Various researchers hoped that one can use the method introduced by Kovalevsky also
for other problems, expressing – conveniently – the given conservative forces by means
of certain potential functions; but E. Padova showed in 1895 that this is not possible,
the problem being always reduced – from the mathematical point of view – to the
problem studied by Kovalevsky.
15.2.2.2 Changes of Variables
The problem is put to give to the first integrals a convenient form, so that the two
quadratures which must be effected have a much simpler form. Introducing the complex
variables
11 2
ix ωω=+,
21 2
ix ωω=−,
11 2
iξλ λ=+,
21 2
iξλ λ=−, (15.2.26)
Sonya Kovalevsky succeeds to express all the searched quantities by means of some
hyperelliptic functions of the first kind. Therefore, it results
112
2 xxω =+,
()
221
2ixxω =−,
112
2λξξ=+,
()
221
2iλξξ=−,
and the relations (15.2.22) give
359

MECHANICAL SYSTEMS, CLASSICAL MODELS
()
22
112 12
2 xxγα ξ ξ=+− + ,
()
()
22
221 21
2i ixxγα ξ ξ=−−−.
Taking into account the first two equations (15.2.19), we find the differential equations
which are verified by the functions
11
()xxt= and
22
()xxt= in the form
131 3
2ixxωγα=−
,
232 3
2ixxωγα−= −
. (15.2.26')
The first integrals (15.2.20) take the form
()( )
12 1 2 12 21 3 3
2xx x x x xξξγωαγΩ+− + + = ,
()()
2
2
12 12 3
2xx ξξ ω γ+−++=,
()
22 2 2 2 2 2 2
12 12 21 3 0
xx x xξξγαγγ−++=−,
(15.2.27)
where we took into account the Kovalevsky integral
2
12 0
ξξ γ= .
(15.2.27')
We amplify successively the first two equations (15.2.27) by
1
2x− ,
2
2x− ,
()
12
xx−+ and by
22
1212
,,xxxx, respectively; summing then with the third equation
(15.2.27), we obtain
()
() ( )
2
2
31 3 1 1 1 2
xPxxxωγα ξ−= +−
,
()
() ( )
2
2
32 3 2 2 1 2
xPxxxωγα ξ−= +−,
()()
()
31 3 32 3 1 2
,xxRxxωγαωγα−−=,
(15.2.28)
where we have denoted
2
() 2Px Ax Bx C=++,
() ( )
12 12 1 2
,Rx x Axx Bx x C=+++,
()
2
12
2Axxγ=− + ,
()
12 1 2
2BxxxxγΩ=− + + ,
2222
012
Cxxγγ=−− .
(15.2.29)
Eliminating
1
ξ and
2
ξ between the first two equations (15.2.28) and the equation
(15.2.27'), we find
()
()
()
() ( )
22
2
2
31 3 1 32 3 2 0 1 2
xPxxPxxxωγα ωγα γ−− −− = −
⎡⎤⎡⎤
⎣⎦⎣⎦
. (15.2.28')
From this equation and the third equation (15.2.28), we can express the binomials
31 3
xωγα− and
32 3
xωγα− as functions of
1
x and
2
x , finding thus the differential
equations of first order verified by the functions
11
()xxt= and
22
()xxt= .
Eliminating the above mentioned binomials between the relations (15.2.28) and taking
into account (15.2.27'), we find the relation
360
15 Dynamics of the Rigid Solid with a Fixed Point
() () ( ) ( )
2
22
12 21 012 12
,Px Px x x Qx x B ACξξγ++−= =−
.
(15.2.30)
The identity
()()( )()()
2
2
1 2 1 2 12 12
,,Px Px x x Qx x R x x+− =
(15.2.30')
holds too.
The equations (15.2.27') and (15.2.29) may be written also in the form
()
[
]
()
[
]
()( )
22
2
2
12 21 12012
,Px Px Qx x x xξξ γ+=−−,
12 0
ξξ γ= ,
wherefrom
() ()
[
]
()
2
12 21 12
,Px Px Qx xξξ±=
() () ()
2
2
120012
2 Px Px x xγγ±−−.
We may write
() ()
()()
2
21
12 1020
12 12
Px Px
ww
xx xx
ξξ γγ
⎡⎤
±=±
⎢⎥
−−
⎣⎦
∓
()
2
12 0 1 2 0
ww w wγγ=± −−
(15.2.31)
too, where
()
() ()()
[]
1,2 1 2 1 2
2
12
1
,w Rx x Px Px
xx
=±
−
(15.2.31')
are the roots of the equation (we take into account also the identity (15.2.30'))
()
()
()
()
12 12
2
22
12 12
,,
20
Rx x Qx x
ww
xx xx
−+=
−−
,
(15.2.31'')
which has always real roots for
12
,xx complex conjugate numbers.
15.2.2.3 Reduction of the Problem to Ultraelliptic Integrals
We introduce also the polynomial
42 22
0
() 2 4Px x x xγγΩγγ=− + − + − ,
(15.2.29')
which has the properties
() ()
j
j
Px Px= , 1, 2j = . Following Weierstrass’s theory
concerning the elliptic integrals, one can verify the relations
361
MECHANICAL SYSTEMS, CLASSICAL MODELS
() () ()
12 1
12 1
dd d
2
xx s
Px Px s
ϕ
−+ = ,
() () ()
12 2
12 2
dd d
2
xx s
Px Px s
ϕ
+=
,
(15.2.32)
where
()
2
22 22
() 2sssϕγγγγΩ=−+−−
⎡⎤
⎣⎦
(15.2.32')
is the Euler resolvent of the equation
() 0Px = and where we have introduced Sonya
Kovalevsky’s variables
11
swγ=+,
22
swγ=+. (15.2.32'')
The zeros
123
,,eee of the polynomial ()sϕ can be expressed by means of the zeros
123
4
,,,εεεε of the polynomial ()Px in the form
()
2
112
1
2
e
εε=+,
()
2
213
1
2
e
εε=+,
()
2
31
4
1
2
e
εε=+.
(15.2.33)
We mention that one may use the Aronhold resolvent too in the form
3
23
() 4ssgsgψ =−−,
()
22 2
20
1
3
g
γγ γ=− − + ,
()
22 22 3
30
11
327
g
γγ γ γΩ γ=− − + −
.
(15.2.34)
Starting from the equations (15.2.31) and using the Kovalevsky variables and the
notations
0
4
e γγ=+ ,
5
0
e γγ=−, (15.2.33')
we obtain
()
()
()()
()
2
55
11212
44
12
2
Px
sese sese
xx
ξ =− −+− −
−
,
()
()
()()
()
1
55
21212
44
12
2
Px
sese sese
xx
ξ =− −−− −
−
.
(15.2.35)
Noting that
()()
()
()()
22
12
12 12
2
12
4
Px Px
ww ss
xx
=− =−
−
and taking into account the relations (15.2.35) and the identities
362