Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

15 Dynamics of the Rigid Solid with a Fixed Point
We present firstly a general study of the motion, determining the rotation angular
velocity vector and putting stress on the motion of precession; we pass then to a
geometric representation of the motion, using the results obtained by Poinsot in this
direction.
15.2.1.1 Integration of the Equations of Motion
The motion of the heavy rigid solid with a fixed point is governed by Euler’s equations
(15.1.21); these equations take the form
()
13 23 32
JIJ Mgωωωρα+− =
,
()
233131
JJI Mgωωωρα+− =−
,
3
0ω =
(15.2.1)
in the Lagrange-Poisson case. We obtain
0
33
()tωω= ,
(15.2.1')
the constant
0
3
ω being called spin, while the first integrals (15.1.42'), (15.1.43') take the
form
()
0
11 22 33 3
3O
JIKωα ωα ω α
′
′
++ =
,
()()
2
22 0
12 33 33
22JIMghωω ω ρα++ =− +.
(15.2.1'')
The first integrals (15.2.1'), (15.2.1''), together with the first integral (15.1.44), form the
system of four first integrals necessary in the general theory to solve the problem.
Unlike the Euler-Poinsot case, the kinetic and the kinematic aspects cannot be
separated in this case. It is convenient to replace the direction cosines
123
,,ααα of the
3
Ox
′
-axis with respect to the frame of reference R by the relations (5.2.36); it results
()
0
12 33
3
sin cos sin cos
O
JIKωϕω ϕθ ω θ
′
′
++=
,
()()
2
22 0
12 33 3
2cos2JIMghωω ω ρ θ++ =− +.
(15.2.1''')
Associating the relations (5.2.35) and eliminating the components
1
ω and
2
ω , we get
the system of equations
20
3
sin cosaψθαω θ=−
,
22
sin cosbψθθβ θ+=−
,
0
3
cosψθϕω+=
,
(15.2.2)
where we have introduced the notations
3
/
O
KJα
′
′
=
,
()
2
0
33
2/hI Jβω
⎡
⎤
=−
⎣
⎦
,
3
/0aIJ=>,
3
2/0bMgJρ=>; we notice that α and β are constants which
depend on the initial conditions, while the constants
a and b are functions only of the
geometry and the mechanical properties of the rigid solid.
343

MECHANICAL SYSTEMS, CLASSICAL MODELS
The system of differential equations (15.2.2) will determine Euler’s angles
()tψψ= , ()tθθ= and ()tϕϕ= . Eliminating ψ
between the first two relations,
we obtain
()
2
0222
3
cos ( cos )sin sinabαω θ β θ θθ θ−=− −
.
Denoting
cosu θ= , it results the differential equation
2
()uPu=
,
()
()( )
2
20
3
() 1Pu bu u a uβαω=− − −−
,
(15.2.3)
wherefrom
()
0
0
d
u
u
tt
P
ξ
ξ
=+
∫
,
(15.2.3')
with
00
cosu θ= ,
()
00
tθθ= ; the radical is taken with the same sign as
()
0
ut
,
assuming that
()
0
0ut ≠
, ( ()ut
has a continuous variation, beginning from
()
0
ut
).
Fig. 15.19 The graphic ()Pu vs u. The cases
12
uu≠ (a) and
0
12
uuu== (b)
If
0
0θ ≠ and
0
θπ≠ , then we have
()
0
1,1u ∈− ; we notice that ()0P −∞ < ,
() 0P ∞> and (1) 0P ±<, in the hypothesis in which
0
3
aαω≠± , hence
0
33
3
O
KIω
′
′
≠±
. Because the equation (15.2.3) allows a solution only if
()
0
0Pu ≥ , it
results that the polynomial
()Pu is of the form
12 3
() ( )( )( )Pu bu u u u u u=− − −,
(15.2.3'')
where
123
,,uuu are the real zeros of the polynomial of the third degree ()Pu , so that
102 3
11uuu u−< ≤ ≤ < < <∞; the graphic of this polynomial is given in
Fig. 15.19a (to draw this graphic, we assume that
0
/2θπ≤ , hence
0
0u > ) for
12
uu≠
and in Fig. 15.19b for
120
uuu==. Because
12
uu≤ , it results that
12
θθ≥
(we have
0 θπ≤≤), so that the nutation
[
]
21
,θθθ∈ . We notice that the integral
(15.2.3), (15.2.3') is of the form (7.1.4) to (7.1.5); following the same reasoning as in
344

15 Dynamics of the Rigid Solid with a Fixed Point
Chap. 7, Sect. 1.1.1, we can state that
()ut varies periodically between
1
u and
2
u , the
duration of a complete period being
2
1
d
2
()
u
u
u
T
Pu
=
∫
.
(15.2.3''')
Hence,
()()ut T ut+= and ()()ut T ut+=
; it results, as well ()()tT tθθ+= .
By the change of variable
/uvcc
′
=+
, where
3
/4cb=
and
()
2
20
3
/3ca bβω
⎡⎤
′
=+
⎣⎦
, we can replace the polynomial ()Pu by a polynomial of
the form
3
23
() 4Qv v gv g=−−,
23
,constgg= ; the relation (15.2.3') becomes
()
()
0
0
d
v
v
ct t
Q
η
η
−=
∫
,
(15.2.4)
where
()
00
vcuc
′
=−
. Denoting
()
23
;,vggα= P , we introduce the variable α
through the agency of the elliptic function
P of Weierstrass, corresponding to the
constants
2
g and
3
g ; this function verifies the differential equation
2
3
23
d()
4() ()
d
gg
α
αα
α
⎡⎤
=−−
⎢⎥
⎣⎦
P
PP
,
so that
()
00
ct tαα−= −, where
0
α is given by
()
0023
;,vggα= P . The function
()ut (and, implicitly, the angle of nutation ()tθ ) will be given by
()()
00
1
() cos ()
ut t c c t t
c
θα
′
==+ −+P .
(15.2.4')
We can introduce a new variable
κ by the relation
()
22 2
12121
cos sin sinuu u u u uκκ κ=+=+−
()
2
221
cosuuu κ=− −
()
()
22
331
1sinuuu k κ=− − −
,
21
31
1
uu
k
uu
−
=<
−
.
(15.2.5)
Replacing in (15.2.3'), (15.2.3''), we get
()
0
0
22
d
1sin
pt t
k
κ
κ
χ
χ
−=
−
∫
,
()
31
1
2
p
bu u
=
−
,
(15.2.6)
345

MECHANICAL SYSTEMS, CLASSICAL MODELS
where
0
κκ= corresponds to
0
uu= . Denoting sinw κ= , we can write
()
()( )
0
0
22
d
11
w
w
pt t
k
ζ
ζζ
−=
−−
∫
(15.2.6')
too, with
00
sinw κ= . By means of the elliptic integral of the first kind
()
,Fkκ ,
given by (7.1.41), one can use also the formula (15.1.51'). Introducing Jacobi’s elliptic
functions, it results, as well,
() () ( )()
22 2
102 0121 0
( ) cn sn snut u ptt u ptt u u u ptt=−+ −=+− −
()()()()
22
221 0 331 0
cn dnuuu ptt uuu ptt=− − − =− − − . (15.2.5')
Taking into account the relation (
123
,,eee are the zeros of the polynomial ()Qv )
()
13
3
2
13
sn ;
ee
e
ee
uk
α
−
⎛⎞
=+
⎜⎟
−
⎝⎠
P ,
(15.2.7)
which links the elliptic function of Weierstrass to the Jacobi elliptic functions, we can
pass from the formula (15.2.4') to the formulae (15.2.5'). The period (15.2.3''') can be
expressed by a formula of the form (15.1.54). The motion of nutation is thus put in
evidence. We can set up two circular cones of common axis
3
Ox
′
and angles at the
vertex
1
2θ and
2
2θ , respectively; the
3
Ox -axis describes a cone contained between
these two cones (Fig. 15.20a). If the two mentioned cones form only one cone
(
() 0Pu = has a double root, hence
12
θθ= ), then this cone will be a circular one. The
other angles of Euler will be given by the equations (15.2.2), in the form
0
3
2
1
au
u
αω
ψ
−
=
−
,
()
0
3
0
3
2
1
auu
u
αω
ϕω
−
=−
−
.
(15.2.8)
It results that ()()tT tψψ+=
and ()()tT tϕϕ+=
, so that
0
()()tT tψψΨ+= +,
0
()()tT tϕϕΦ+= +,
(15.2.8')
where
0
Ψ and
0
Φ are constant in time.
Research in this direction has been made by C.G.J. Jacobi, E. Lottner, O.I. Somov,
C. Frenzel, A. Söderblom, J. Chrapan etc.
15.2.1.2 Motion of Precession. Regular Precession
As in Sect. 15.1.2.2, to can appreciate easier the motion of the rigid solid and to can
make easier the determination of its position, we will consider the motion on the unit
sphere of centre
O of the point Q at which the movable
3
Ox -axis pierces it
(Fig.15.20a); the position of the point
Q will be specified by the colatitude θ and by the
346

15 Dynamics of the Rigid Solid with a Fixed Point
longitude
/2ψπ− . The point Q will describe on the sphere a curve Γ of equation
()
ψψθ=
, contained between the parallels
1
θθ= and
2
θθ= ; taking into account
(A.1.41') and adapting the notations, the element of arc on the curve will be given by
the relation
222222
ddsind ddsss
ψ
θ
θθψ=+ =+ (Fig. 15.20b). The angle V made by
the curve
Γ with a meridian circle at the point Q is given by tanV
d/d sind/dss
ψ
θ
θψ θ== . Due to
cosu θ=
, we have d/d sind/duψθ θψ=−
sin d /dtuψθ=−
; taking into account (15.2.3), (15.2.8), we may write
Fig. 15.20 Motion of precession on the unit sphere (a). The curve Γ on a spheric zone (b)
()
0
3
2
tan
1()
au
V
uPu
αω−
=
−
,
(15.2.9)
where we have no more mentioned the sign before the radical. Let us denote by
00
333
3
//1
O
uaKIαω ω
′
′′
== ≠±
(corresponding to the previous hypothesis) the
value of
u which equates to zero tanV ; from (15.2.8) it results that ψ
vanishes for
uu
′
= too. If
[]
12
,uuu
′
∈
, hence if u
′
is not a possible value for u, then ψ
has
always the same sign (it never vanishes), while
ψ varies in the same sense (increasing
or decreasing); the meridian plane is rotating in the same sense and the point
Q
describes the curve
Γ (Fig.15.21a). We notice that for
1
uu= and
2
uu= we have
/2V π= , the curve being tangent to the parallels
1
θθ= and
2
θθ= . If
()
12
,uuu
′
∈ , then ψ
changes of sign when u passes through the value u
′
; the angle
of precession varies in both senses, while the curve forms loops, being tangent to the
parallels
1
θθ=
and
2
θθ=
(because /2V π= ) and normal to the parallel θθ
′
=
(which corresponds to
uu
′
= ), because
tan 0V =
. Obviously, the double points are
347
MECHANICAL SYSTEMS, CLASSICAL MODELS
on the same parallel and on the meridians which pass through the points of tangency of
the curve
Γ with the parallel uu
′
= (Fig. 15.21b). It remains to consider the case in
which
1
uu
′
= or
2
uu
′
= ; in this case
()
0Pu
′
= , while from (15.2.3) it results
/ubβ
′
= . We calculate the derivative ()Pu
′
starting from the relation (15.2.3) or
from the relation (15.2.3''); in the first case,
()
()
2
11
10Pu b u
′
=− − <
and
()
()
2
22
10Pu b u
′
=− − < , while in the second case we have
() ( )( )
12131
0Pu bu u u u
′
=− −> and
() ( )( )
22132
0Pu bu u u u
′
=− − − < .
Hence, we cannot have
1
uu
′
= , but only
2
uu
′
= . The corresponding curve Γ is
tangent to the parallel
1
θθ=
. We notice that the difference
0
3
auαω− is of the order
of magnitude of
2
uu− , while
()Pu
is of the order of magnitude of
2
uu− , so
that
tan 0V → for
2
uu→ , the curve Γ being tangent to the meridian circle on the
parallel
2
θθ= . On the other hand, from (15.1.95) it results that
()
0
3
sign sign auψαω=−
()
2
sign 1uu=−= for
2
uu< , while
()
2
0uψ =
;
hence, the angle
ψ is constantly increasing, the points at which the curve Γ reaches the
parallel
2
θθ= being cuspidal points (Fig. 15.21c).
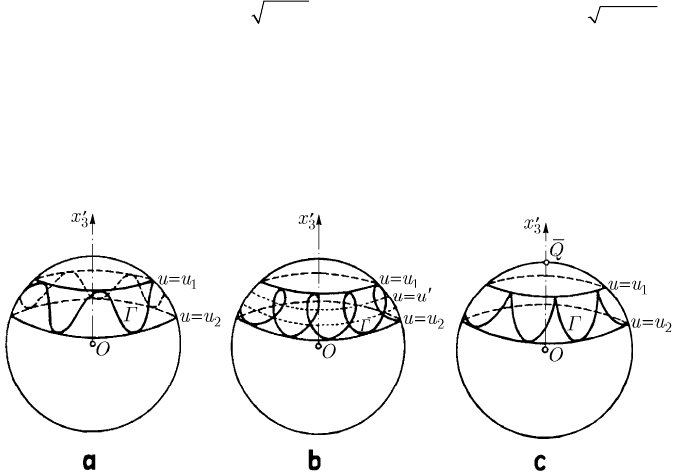
Fig. 15.21 The drawing of the curve Γ on a zone of the unit sphere. The cases
[]
12
,uuu
′
∈
(a),
12
(, )uuu
′
∈
(b) and
1
uu
′
= or
2
uu
′
= (c)
In conclusion, the point
Q (hence the axis
3
Ox too) has a motion of nutation and a
motion of precession between the two parallels
1
θθ= and
2
θθ= , with the velocity
3
sinθψθ
′
=+
vn i
,
2222
sinv θψ θ=+
. Taking into account (15.2.8'), we can show
that the curve
Γ is, in general, an open curve, excepting the case in which
0
Ψ
is
commensurable with
π.
It remains to consider also the case in which
00
333
3
//1
O
uaKIαω ω
′
′′
== =
. From
(15.2.3) we notice that we can write
348
15 Dynamics of the Rigid Solid with a Fixed Point
2202 2
3
() ( )(1 ) ( )( )Pu bu u a u uβω
′
=− − − −.
Hence, if
1u
′
= , then we have
()
10P = , so that
22
cos 1u θ== and
2
0θ = , while
the superior parallel
2
uu= is reduced to the piercing point Q of the
3
Ox
′
-axis on the
unit sphere; the curve
Γ has the form drawn in Fig. 15.21c, the point Q being a
multiple cuspidal point. Such a situation takes place, for instance, if the
3
Ox -axis
coincides with the
3
Ox
′
-axis at the initial moment (hence
0
0θ = ). We cannot have
1u
′
=− because, in this case, we would have
1
1u =− too, hence
1
uu
′
= , which we
have seen that it is not possible.
The first formula (15.1.95) can be written also in the form
00
33 33
22
d
dd
11
()
II
uu uu u
t
JJ
uu
Pu
ωω
ψ
′′
−−
==
−−
,
wherefrom
()()()
2
1
02
33 1 2 3
d
1
u
u
Jb u u u
Iuuuuuuu
Ψ
ω
′
−
=
−−−−
∫
,
(15.2.10)
21
Ψψ ψ=− representing the variation of the precession in the semi-period T/2.
Projecting the curve
Γ on the equatorial plane (normal to the
3
Ox
′
-axis), one obtains a
curve contained in a circular annulus and successively tangent to the limit circles; the
angle at the centre in this plane, formed by two successive points of tangency, is the
apsidal angle
Ψ (the angle formed by two meridian planes which pass through two
successive points of tangency to the parallels
1
uu= and
2
uu= ). If the above integral
has a positive value (e.g., if
2
uu
′
≥ ), then
()
0
21 3
sign signψψ ω−=
, while if the
integral has a negative value (e.g., if
1
uu
′
< ), then the precession verifies the relation
()
0
21 3
sign signψψ ω−=− . Following a demonstration given by J.B. Diaz and F.T.
Metcalf in 1962, if
()
12
,uuu
′
∈ , then we can write
()()() ()()()
2 2
1 1
12 3 12 3
1d 1d
2
11
uu
uu
uu uu
J
uu
uu u uu u uu u uu u
′′
+−
=−
++
−−− −−−
∫∫
()()()
()()
()
()()
2
1
12
123 12
11d
1
111 1
u
u
uuu
u
uuu uuuuu
′
++
+
>
+++ + − −
∫
()()()
()()
()
()()
2
1
12
123 12
11d
1
11 11
u
u
uuu
u
uuu uuuuu
′
−−
−
−
−− − − − −
∫
,
where we have used the inequalities
33 3
11uuuu−< − < +. But from
(15.1.90'') one observes that
349

MECHANICAL SYSTEMS, CLASSICAL MODELS
()()()
()
()()
()
22
2
020
33
123
1
1
111
aa u
P
uuu
bb b
αω ω
′
++
−
+++=− = =
;
analogously,
()()()
()
()()
()
22
2
020
33
123
1
1
11 1
aa u
P
uuu
bb b
αω ω
′
−−
−− −=−= =
.
It results thus
()()
()
()()
()()
()( )( )
22
11
12 12
0
312112
11d 11d
2
11
uu
uu
uuu uuu
b
J
a
uuuuu u uuuu
ω
++ −−
⎡⎤
>−
⎢⎥
+−− − − −
⎣⎦
∫∫
.
By the substitution
uv=− we notice that the second integral in the parenthesis is
equal to the first one. Moreover, by the substitution
()
1/ 1vu=+ we have
()
()()
()()( )
2
12
12 12
dd
1
11 2 1
uv
uuuuu
uuv uuv
=−
+−−
−+ + + + + −
∫∫
()()
()()
12 1 2
21
12
2211
1
arc sin
11
uu u uv
uu
uu
++− + +
=
−
++
,
so that the two above equal integrals equate
π; as a consequence, 0J > . We find thus
again a proposition obtained in 1895 by J. Hadamard (corresponding to an affirmation
of Halphen, based on fastidious demonstrations), by using the method of residues of the
functions of complex variables; we can state
Theorem 15.2.1 (Halphen-Hadamard) The apsidal angle Ψ has the same sign as the
spin
0
3
ω (
0
3
sign signΨω= ) if
1
uu
′
> and an opposite sign (
0
3
sign signΨω=− ) if
1
uu
′
< .
We can show also that the sign of
Ψ is the same as the sign of dψ for
1
uu= (the
lowest position of the point
Q on the curve Γ).
Other researches in this direction have been made by A. Métral. Superior and
inferior limits for the apsidal angle
Ψ have been put in evidence by W. Kohn in 1946,
being found again – using simpler methods – by Diaz and Metcalf in 1964.
Analogously, the second formula (15.2.8) allows to calculate the variation of the
angle of proper rotation in the form (
21
Φϕ ϕ=−)
()
()()()
2
1
3
02
3123
d
1
1
u
u
I
uuu
bu
J
uuuuuuu
Φ
ω
′
−
⎡⎤
=−
⎢⎥
−−−−
⎣⎦
∫
.
(15.2.10')
We assumed above that
12
uu< ; in the case of a double root (
120
uuu==,
Fig. 15.19b) we have
0
()ut u= , hence
0
()tθθ= . From the relations (15.2.8) it results
350
15 Dynamics of the Rigid Solid with a Fixed Point
that ψ
and ϕ
are constant. Hence, the
3
Ox -axis (rigidly linked to the rigid solid)
describes a circular cone around the
3
Ox
′
-axis, called cone of precession, with a
constant angular velocity
ψ
(of precession), while the rigid solid is uniformly rotating
(with the velocity of proper rotation
ϕ
) about the
3
Ox -axis. This is the case of a
regular precession (a uniform motion of precession). The double root
0
u must verify
the relations
()
0
0Pu = and
()
0
0Pu
′
= ; eliminating the differences
0
buβ − and
0
30
auαω− and taking into account the relations (15.2.8) written for the initial moment
(
()
00
tψψ=
and
()
00
tϕϕ=
), we get the equivalent conditions
()
02 2
330 0 300 3 0 0 3
cos cosIJ I JI Mgωψ ψθϕψ ψθ ρ−=−− =
,
(15.2.11)
which must be verified by the initial conditions in the case of the regular precession. If,
in the Euler-Poinsot case, the ellipsoid of inertia would be of rotation, then the motion
of precession would be always regular; but, in the Lagrange-Poisson case (the ellipsoid
of inertia being always of rotation), the regular precession takes place only for
particular initial conditions. If the conditions (15.2.11) are only approximately verified
(e.g., in the motion of the Earth, when the angle
θ is no more constant), then the motion
is called pseudoregular precession.
As a matter of fact, we must mention that also other motions for which the imposed
integrability conditions are only approximately verified have been considered. Thus, A.
Pignedoli studied a pseudocase Lagrange-Poisson, in which the mass centre
C is no
more on the
3
Ox -axis but is very close to this one, the properties of symmetry with
respect to this axis being, as well, verified only approximately; A. Pignedoli dealt with
an Euler-Poinsot pseudocase too for a heavy rigid solid, the centre
C of which is very
close to the fixed point
O.
15.2.1.3 Particular Case. Analogy with the Spherical Pendulum
In the particular case in which the spin vanishes (
0
3
0ω = ), the rotation angular velocity
vector is contained, at any moment, in the plane
12
Ox x and has no component along
the
3
Ox -axis. The equation (15.2.3) reads
2
()uPu=
,
()
()
22
() 1Pu bu uβα=− − −.
(15.2.12)
If we denote
/uzl=− , where
3
/lJMρ= , then we find again the equation (7.1.62)
of the spherical pendulum, in its motion on the sphere of centre
O and radius l, studied
in Chap. 7, Sect. 1.3.7; obviously, we must find a convenient interpretation for the
corresponding constants. In the relation which specifies the change of variable appears
the sign −, because the Oz-axis is along the descendent vertical, unlike the
3
Ox
′
-axis
taken along the ascendent vertical.
351
MECHANICAL SYSTEMS, CLASSICAL MODELS
We also notice that
u
′
→±∞, corresponding to the sign of
3O
K
′
′
, so that we are in
the case of the curve
Γ in Fig. 15.21a, as we have seen in the preceding subsection. The
formula (15.2.10) is replaced by
()
()()()
2
1
2
3
12 3
d
1
u
u
O
Jb u
K
uuuuuuu
Ψ
′
=
′
−−−−
∫
.
(15.2.13)
One observes easily that the apsidal angle
Ψ has the same sign as the constant
component
3O
K
′
′
of the moment of momentum. As it has been mentioned in Chap. 7,
Sect. 1.3.7, in conformity with the results given by V. Puiseux in 1842 and by G.
Halphen in 1885, we have
/2πψπ<<. Results in this direction have been given by
A. de Saint-Germain, L. Gérard, A. Weinstein and W. Kohn too. Passing from the
sphere to a surface of rotation, J.L Synge showed that one cannot put in evidence limits
of the apsidal angle for an arbitrary such surface.
As well, the variation of the angle of proper rotation is given by
()
()()()
2
1
2
3
12 3
d
1
u
u
O
Jb uu
K
uuuuuuu
Φ
′
=−
′
−−−−
∫
.
(15.2.13')
In conclusion, the motion of the point
Q on the unit sphere is analogous to the
motion of a heavy particle constrained to stay all the time on a sphere (case of the
spherical pendulum).
15.2.1.4 Problem of the Regular Precession in the General Case of Motion
of the Rigid Solid with a Fixed Point
Considering Euler’s equations, written – in the general case – in the form (15.1.11), we
put the problem to determine the forces which must act on the rigid solid with a fixed
point, so that its motion be a regular precession, associated by a uniform proper
rotation. Hence, let be a rigid solid
S with a fixed point O, which has a motion of
uniform proper rotation about the movable
3
Ox -axis, with the angular velocity ω , the
3
Ox -axis having – at its turn – a uniform motion of precession about the fixed axis
3
Ox
′
, with the angular velocity
′
ω
. The angular velocity vector will be thus specified
by (Fig. 15.22)
00
33
ωω
′′′
=+ = +ωωω ii,
(15.2.14)
where
0
0
ωϕ=
,
0
0
ωψ
′
=
correspond to the initial moment
0
tt= ; in this case, the
angle of precession and the angle of rotation will be given by
()
0
00
()tttϕω ϕ=−+,
()
0
00
()tttψω ψ
′
=−+,
(15.2.14')
0
ϕ and
0
ψ corresponding to the initial moment
0
tt= . The angle of nutation
()()
33
,,θ
′′
==ωω ii is the constant angle formed by the unit vectors of the axes
3
Ox
′
and
3
Ox , being given by
352