Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

15 Dynamics of the Rigid Solid with a Fixed Point
()()()()
[]
222
12131 2 3
23
1
IIIIx IIIIh
II
ρ =−−+−−
()()()()
[]
22
13233 1 2
12
1
IIIIx IIIIh
II
=−−+−−.
Considering the ellipse
1212
AAAA
′′
(Fig. 15.11a), which is entirely travelled through for
2
II<
, we see that
min
ρ corresponds to the points
2
A and
2
A
′
(
1
0x =
), while
max
ρ
to the points
1
A
and
1
A
′
(
()( )
2
13113
/xhIIIIII=− −
); as well, noting that the
ellipse
2323
AAAA
′′
(Fig. 15.11b) is entirely travelled through for
2
II> , we find that
min
ρ corresponds to the points
2
A and
2
A
′
(
3
0x = ), while
max
ρ to the points
3
A and
3
A
′
(
()( )
2
31313
/xhIIIIII=− −). Hence, the arc of helpolhode
max
min
PQP
corresponds to a quarter of the ellipse
1212
AAAA
′′
or of the ellipse
2323
AAAA
′′
, as
2
II< or
2
II> , respectively. To a complete travelling through of the polhode P by
the point
P corresponds on the herpolhode H an arc of curve of length
max
min
4PQP
(between corresponding points one has equal lengths on the curves
P and H ), while
the angle described by the radius vector
QP is
max
min
4PQP . If the measure in radians
of the angle
max
min
PQP is not commensurable with π, then the herpolhode is an open
curve; the pole
P does not take again the same position, at the same moment, on the
ellipsoid
E and on the plane Π. If, in particular, the measure in radians of the angle is
commensurable with
π, then the herpolhode is a closed curve.
Taking into account the formula (5.1.16') (see Chap. 5, Sect. 1.1.4 too), we can state
that the double of the areal velocity of the point
P in the plane Π is equal to the
projection on the fixed direction of the moment of momentum
O
′
K of the moment with
respect to the fixed point
O of the velocity of the point P (calculated with respect to the
same point
O), that is the moment of this velocity with respect to the OQ-axis, given by
(we take into account the formula (15.1.15') and the notations previously introduced)
()()
()
11 22 33
22
123
223
123
,
O
O
O
O
III
hh h K
K
KI
ωωω
ωωω
ΩΩ
ΩΩ
ωωω
′
⎡⎤
′
⋅×= ,=
⎢⎥
′
⎣⎦
′
K
Kωω ωω
.
Consequently, we can write
323
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
[]
()
[]
()
[]
11 22 33
2
2
123
23
23123 31231 12312
///
III
K
I
III III III
ωωω
ρκ ω ω ω
Ω
ωω ωω ωω
=
−−−
in polar co-ordinates
ρ, κ, where we have used Euler’s equations (15.1.40). Developing
the determinant after the last line, it results
() () ()
222
2
23 31 12
2222222
23 31 12
23
123
II II II
K
III
I
ρκ ωω ωω ωω
Ω
−−−
⎡⎤
=++
⎢⎥
⎣⎦
.
Taking into account (15.1.56), we can write
()()
()()
123
22 2222
23
23
1213
1
III
K
IIII
I
ρκ γ ω ω γ
Ω
⎡
=−−
⎢
−−
⎣
()()
()()
2222
31
2312
1
IIII
ωγωγ+−−
−−
()()
()()
2222
12
1323
1
IIII
ωγγω
⎤
+−−
⎥
−−
⎦
,
while, by means of the relation (15.1.69'), we have
()()()
()
()
()
[]
{
123
22222
232 3 2
2
231312
sign
III
II II
KIIIIII
Ω
ρκ δ ρ ρ δ=−−−−
−−−
() ()
[
]
()
[
]
22 22
13 3 2 1 2
sign signII II IIρδ ρδ+− − − − −
() ()
[
]
()
}
22 22
12 1 2 2
signII IIρδ δρ+− − − − .
Effecting the calculations, we obtain the differential equation
()
[
]
222
2
sign IIρκ Ω ρ δ=+ −
,
(15.1.71)
where
()()
132
22
123
I III II
K
IIII
δ
−− −
=
,
(15.1.71')
which determines the angle
κ. We notice that
()
2
2
sign 0IIδ −> for
2
II>
; if
2
II<
one finds
222
min 1
ρδδ=>. Hence,
0κ >
, the angle κ being thus increasing in
time; the herpolhode surrounds thus the point
Q always in the same sense, attaining
successively the internal and the external circles of the annulus
C.
324
15 Dynamics of the Rigid Solid with a Fixed Point
Eliminating the time between the equations (15.1.70) and (15.1.71), we can write the
differential equation of the herpolhode in the form
()
[
]
()
[]
()
()
[]
22
2
22 2222
12 2 3 2
sign d
1
dd
sign sign
II
I
Kh
II II
ρδ ρ
κκ
ρρ δ δ ρ ρ δ
+−
==±
−−−−−
.
(15.1.72)
One observes thus that between the constants which intervene in this equation take
place the relations
2222
12 3
123
11 1
III
III
δδδδ
⎛⎞ ⎛⎞
=− =− = −
⎜⎟ ⎜⎟
⎝⎠ ⎝⎠
.
(15.1.72')
The equation (15.1.72) is with separate variables and can be integrated by a quadrature
with the aid of elliptic functions. The angle
α made by the radius vector QP with the
tangent to the herpolhode (Fig. 15.12) is given by
tan d /dαρκρ= . We notice that
for
min
ρρ= or for
max
ρρ= , hence at the points
min
P and
max
P , respectively, this
tangent tends to infinity; hence, the herpolhode is tangent to the circles which form the
annulus
C. The curvature at a point P is given by
()
()
3
222
3/2
2
2
2d /d d /d d /d
1d/d
κρρκρ ρ κρ
ρκρ
++
⎡ + ⎤
⎣⎦
,
in polar co-ordinates. We study the sign of the numerator of this expression or, which is
equivalent, the sign of the function (we take into account that
d/d 0κρ≠ )
()
2
2
2
21dd d
ln
dd d
f
κκ
ρ
ρρ ρ ρ
ρ
⎛⎞
=+ +
⎜⎟
⎝⎠
,
because the denominator is always positive. Taking into account the equation (15.1.72),
the notations (15.1.70'), (15.1.71') and the relations (15.1.72'), we can write
()
()
()
()()
()
12 3 1
2
22 22
1213
212
21
sign sign
IIII
f
IIII
II I I
ρ
ρδ ρδ
+−
=+
−−
+− − −
()
()()
()
()()
()
23 1 2 31 2 3
22 22
2312 1323
232
11
sign
II I I II I I
IIII IIII
II
δρ ρδ
+− +−
++
−− −−
−−−
.
By reduction to a common denominator, one finds that the numerator is a polynomial of
second degree in
2
ρ (the coefficient of
6
ρ vanishes), which has two real zeros (we
notice that
()
00
f
= ). Because
222
max
min
ρρρ<< (excepting the points of tangency
with the circular annulus, for which we have equality), where
22
min 1
ρδ=
for
2
II<
325
MECHANICAL SYSTEMS, CLASSICAL MODELS
(we have
22
1
δδ< too, in conformity to the formula (15.1.72'), while
()
2
sign 1II−=−) and
22
min 3
ρδ= for
2
II> (we have
()
2
sign 1II−= too),
while
22
max
2
ρδ= , it results that
()
2
0
f
ρ > for any point of the herpolhode; in
conclusion, this curve has always the concavity directed towards the fixed point
Q
(hence without points of inflection, as it has been stated by Poinsot in his memories).
15.1.2.7 Permanent Rotations
We notice that the system (15.1.40) has three obvious systems of particular solutions
0
ii
ωω= ,
0
const
i
ω = , 0
j
k
ωω==, ijki≠≠≠, ,, 1,2,3ijk= ,
(15.1.73)
which must correspond to the initial conditions. If, e.g., we consider the solution
0
11
ωω= ,
23
0ωω==, this one must verify the system (15.1.40) at any moment t,
hence also at the initial moment; thus, the initial conditions must be of the same form.
In this case, the theorem of existence and uniqueness ensures that the motion of the
rigid solid is a uniform (finite) rotation about the
1
Ox -axis (
1
constω==
iω );
because the derivative with respect to time of the vector
ω is the same in the two frames
of reference (
′
R
and R ), it results that the vector ω is constant also with respect to
the inertial frame (the direction of the
1
Ox -axis remains constant with respect to this
frame too). Analogously,
2
ω= iω and
3
ω= iω , respectively, can represent uniform
rotations about the corresponding axes if the initial conditions are compatible with these
solutions. The respective axes of rotation are called permanent axes of rotation, the
corresponding rotations being permanent rotations. This result corresponds to the
Theorem 14.2.1, obtained as a particular case of motion of the rigid solid about a fixed
axis.
We consider now the permanent rotations as limit cases of the general results
obtained above, corresponding to the situation in which the inequalities concerning the
position of the constant
I with respect to the principal moments of inertia (not equal one
to the others) become equalities. Thus, if
3
II= , then the relation (15.1.66) leads to
12
() () 0ttωω==, because
1
II≠ and
2
II≠ , while the second relation (15.1.49)
shows that
3
() consttωΩ== ; moreover, the relations (15.1.48') lead to the same
result (the last relations can take place only if
2
0ω = , while the first relations lead to
1
0ω = ). We are thus in the case (15.1.73) for 3i = ,
1j =
and 2k = . As we have
seen, the
3
Ox -axis is fixed with respect to the rigid solid (hence with respect to the
frame of reference
R too) and with respect to the fixed frame
′
R
. From (15.1.58) it
results
sin sin sin cos 0θϕ θϕ==, cos 1θ = , hence 0θ = ; the angle ϕ, as well as
the angle
ψ given by (15.1.59'), will be arbitrary (the planes
12
Ox x
′′
and
12
Ox x are
superposed). Thus, the
3
Ox -axis coincides with the
3
Ox
′
-axis, the support of the
moment of momentum
O
′
K ; the formula (15.1.46) leads to the same result if we make
3
ωω Ω==, noting that ω and
O
′
K have the same direction (including the same
326
15 Dynamics of the Rigid Solid with a Fixed Point
sense). We can choose the angle
ψ arbitrarily ( () consttψ = , eventually 0ψ = ), the
angle
()
00
()tttϕΩ ϕ=−+ corresponding to a uniform rotation about the fixed axis
(Fig. 15.13a). We have seen that, in this case, the polhode is reduced to the points
3
A
and
3
A
′
at which the polhodic cone, degenerated into a straight line along the major
axis of the ellipsoid of inertia pierces this ellipsoid. Because we are in the case
2
II< ,
it results that
min 1
0ρδ==,
max
2
0ρδ==, so that the herpolhode is reduced to the
point
3
A (or to the point
3
A
′
), the plane Π being tangent to the ellipsoid at this point.
Fig. 15.13 Permanent rotations about the fixed axis
3
Ox
′
if it coincides with the
3
Ox -axis (a), the
1
Ox -axis (b) or the
2
Ox -axis (c)
If
1
II= , then the relation (15.1.66) leads to
23
() () 0ttωω==, because
2
II≠
and
3
II≠ ; we obtain, analogously,
1
() consttωΩ== . We find thus again the case
(15.1.73) for
1i = , 2j = , 3k = . The
1
Ox -axis coincides with the fixed axis
3
Ox
′
,
because
sin sin 1θϕ= , sin cos cos 0θϕ θ== (so that /2θϕπ== ), the angular
velocity vector
ω being along the moment of momentum
O
′
K too (in direction and,
obviously, sense). Using the relation (15.1.59'), we notice that the uniform rotation
about the fixed axis specified by the angle of precession
()
00
()tttψΩ ψ=−+,
corresponding to the initial conditions too (Fig. 15.13b). The polhodic cone is reduced
to a straight line along the minor axis of the ellipsoid of inertia and pierces this ellipsoid
at the extremities
1
A and
1
A
′
of the respective axis; the polhode is thus formed by the
points
1
A and
1
A
′
. Being in the case
2
II> , we have
min 3
0ρρ==,
max
2
0ρρ==, the herpolhode being reduced to the point
1
A (or to the point
1
A
′
) and
the plane
Π being tangent to the ellipsoid at this point.
Finally, if
2
II= , then the notations (15.1.56') lead to
22 2
13
γγΩ==,
()
22
22 31231
/IIIIIIγΩ=+−, while the equation (15.1.57') becomes
()
()
2
2222
2
d
2
d
t
ω
ωΩ γΩ=± − −
,
327
MECHANICAL SYSTEMS, CLASSICAL MODELS
so that
222
2
Ωωγ≤≤. We denote
222 22
2
cos sinωΩ χγ χ=+, 0 χπ≤≤ (as a
matter of fact,
0
χχπ≤≤
,
0
0χ ≥
); it results (we have taken the sign + before the
radical, corresponding to an increasing of
2
ω
)
d
d
sin
t
χ
λ
χ
=
,
()()
1223
22
2
13
IIII
II
λγΩ Ω
−−
=−= .
By integration, we have
ln tan ( )
2
t
χ
λτ=+
,
0
0
1
ln tan
2
t
χ
τ
λ
=−
,
wherefrom
()
tan e
2
tλτ
χ
+
= ,
()
22 22 2
22
tanh ( )tωγ γΩ λ τ=− − +.
(15.1.74)
Then, the relations (15.1.56) lead to
2
1
2
1
2
cosh ( )t
β
ω
λτ
=
+
,
222
2
tanh ( )tωΩ λ τ=+,
2
3
2
3
2
cosh ( )t
β
ω
λτ
=
+
,
(15.1.74')
where we took into account (15.1.49') and we noticed that
22
ββΩ==. In the
hypothesis in Sect. 15.1.2.1 (
()
20
0tω > ,
()
10
0tω < ,
()
30
0tω > ) we have
1
1
()
cosh ( )
t
t
β
ω
λτ
=−
+
,
2
() tanh ( )ttωΩλτ=+,
3
3
()
cosh ( )
t
t
β
ω
λτ
=
+
,
(15.1.74'')
observing that the pole
P travels through an arc of ellipse in an infinite time
(
1
lim 0 0
t
ω
→∞
=−,
3
lim 0 0
t
ω
→∞
=+,
2
lim 0
t
ωΩ
→∞
=−), stopping at the point
2
A .
Starting from (15.1.51) and making
p λ= , 1k = ,
2
βΩ= , it results
2
0
2
2
/
0
2
/
1d
1
z
tt
z
ωΩ
ωΩ
λ
−=
−
∫
,
wherefrom, by a change of variable
tanhz κ= , we find again the above results (we
use the relations (15.1.49'') too). We notice that, for
t →∞, the relations (15.1.58),
(15.1.59') lead to
sin sin 0θϕ→ , sin cos 1θϕ→ , ψΩ→
, wherefrom /2θπ→ ,
0ϕ → ,
()
00
ttψΩ ψ→−+ (we have put in evidence the initial conditions too);
thus, the
2
Ox -axis tends to the fixed axis
3
Ox
′
(being thus also a fixed axis), the
rotation taking place about the moment of momentum
O
′
K (Fig. 15.13c). If the initial
conditions correspond to the motion determined for
t →∞, then we obtain a
328
15 Dynamics of the Rigid Solid with a Fixed Point
permanent rotation of the form (15.1.73) about the mean axis of the ellipsoid
E (the
mean principal axis of rotation) for
2i = ,
3j =
, 1k = .
Fig. 15.14 The double spiral of a herpolhode in the limit case in which
the circular annulus is reduced to a circle
We have seen, in this case, that the polhode is formed by two ellipses (
ε and ε
′
),
contained in the planes (15.1.68) in which degenerates the polhodic cone; as a matter of
fact, the case which corresponds to the formulae (15.1.74'') leads to an arc of ellipse
ε,
the sense of travelling through towards the point
2
A being that indicated in Fig. 15.10.
In what concerns the herpolhode, we notice that
min 1 3
0ρδδ===, while
()()
max
21223123
/KI I I I IIIρδ== − − , hence the circular annulus is reduced
to a circle. The equation (15.1.72) of the herpolhode becomes (we have
0δ =
)
22
max
d
d
hκ
ρ
ρρ ρ
=±
−
.
By integration, we get
()
(
)
max max
0
cosh
h
ρρ
κκ
ρ
=± −
,
(15.1.75)
329

MECHANICAL SYSTEMS, CLASSICAL MODELS
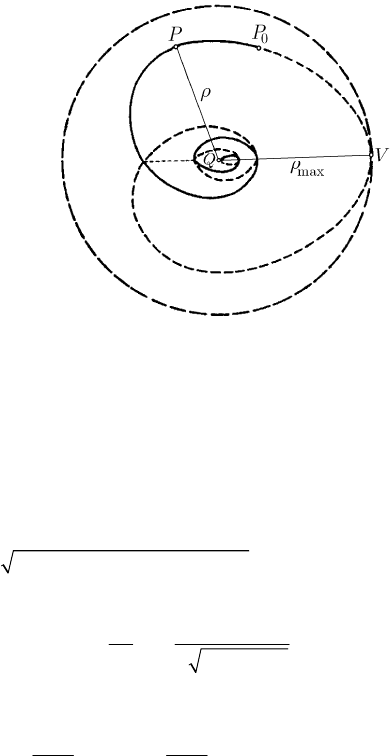
hence a double spiral, with an axis of symmetry, which tends asymptotically towards
the point Q (the vertex V corresponds to
max
ρ , being the only point of tangency with
the circle) (Fig. 15.14).
As a matter of fact, the point P travels through only an arc of spiral, from the point
0
P (corresponding to the initial position) till the asymptotic point Q (to which the pole
arrives in an infinite time, although the length of the spiral is finite), through which
passes the rotation axis.
In conclusion, in the particular case in which the rigid solid begins to rotate about a
principal axis of inertia, corresponding to the fixed point, this motion continues
indefinitely; the axis of rotation is fixed in the solid and in the space (with respect to the
frames of reference
R and
′
R
, respectively). Assuming now that /
i
ωω, 1,2, 3i = ,
are the constant direction cosines of an arbitrary permanent axis of rotation Δ with
respect to the frame of reference
R, the formula (15.1.47'') shows that constω = , so
that the components
i
ω , 1, 2, 3i = , must be constant too; Euler’s equations (15.1.40)
become
()
2323
0IIωω−=,
()
3131
0IIωω−=,
()
1212
0IIωω−=,
and hold only if two of the components of the vector ω vanish (if the principal moments
of inertia are distinct). Hence, the principal axes of inertia are the only instantaneous
axes of rotation which remain fixed in the rigid solid (as well as in space – the frame of
reference
′
R
). Analogously, imposing the condition constω = (hence 0ω =
), the
relation (15.1.57') shows that we can have only
1
ωγ= , or
2
ωγ= or
3
ωγ= , while
from (15.1.56) it results that we have
1
0ω =
or
2
0ω =
or
3
0ω =
(as a matter of
fact, to this conclusion leads also the relation (15.1.57)). The equations (15.1.40) show
then that the only axes of uniform rotation are the principal axes of inertia.
Poinsot’s geometric representation allows also an intuitive study of the stability of
the three possible permanent axes of rotation. The quantity I of the nature of a moment
of inertia depends on the initial conditions (15.1.19) for the angular velocity ω. Taking
into account (15.1.48), we have
() () ()
() () ()
222
20 20 20
11 22 33
222
000
11 22 33
III
I
III
ωωω
ωωω
++
=
++
,
(15.1.76)
so that
I depends continuously on the initial conditions; if
0
=ω 0 , then we are in the
case of equilibrium, while
I is non-determinate (it is a quantity of dynamic character).
Let us assume that
0
1
0ω >
,
00
23
0ωω==
; in this case
1
II= , the polhode reducing
to the point
1
A (if
0
1
0ω < , then there corresponds the point
1
A
′
) on the ellipsoid E.
By an arbitrary variation of the initial conditions, the point
P moves away from the
point
1
A (because I will vary with respect to
1
I ), describing a polhode (closed curve)
around this point. The plane tangent at
P to the ellipsoid of inertia will have a variation
330
15 Dynamics of the Rigid Solid with a Fixed Point
with respect to the plane
Π tangent to the same ellipsoid at the vertex
1
A , while the
herpolhode will be contained in a circular annulus of non-zero radii. All these variations
are of the same order of magnitude, as it can easily verified (as a matter of fact, as the
polhodic and herpolhodic cones). If we assume that
0
3
0ω > ,
00
12
0ωω==, then we
have
3
II= , the polhode being reduced to the point
3
A on the ellipsoid E ; in case of
an arbitrary variation of the initial conditions we can make analogous considerations.
But if
0
2
0ω > ,
00
31
0ωω==, then we have
2
II= , while the polhode is reduced to
the point
2
A (intersection of the ellipses ε and ε
′
) on the ellipsoid of inertia. To an
arbitrary variation of the initial conditions, the quantity
I will vary with respect to
2
I
,
while the pole
P describes a polhode around one of the points
3
A and
3
A
′
(or
1
A and
1
A
′
), which leads to a corresponding herpolhode; obviously, the variations
corresponding to the polhode and to the herpolhode are no more of the order of
magnitude of the variations of the initial conditions. In conclusion, we can state
Theorem 15.1.11 A permanent rotation about the major or of the minor axis of the
ellipsoid of inertia corresponding to the fixed point represents a stable motion, while a
permanent rotation about the mean axis of this ellipsoid constitutes a labile motion.
We notice that the ellipses
ε and ε
′
(which pierce at the points
2
A and
2
A
′
) divide
the ellipsoid in four zones, each one of them containing one of the points
113
,,AAA
′
or
3
A
′
. After Bour, one can take as measure of the stability of the rotation about the axis
11
AA
′
, for instance, the ratio between the area of the zone which contains one of the
points
1
A or
1
A
′
and half of the area of the ellipsoid E. One observes that for
1
I close
to
2
I (hence, for an ellipsoid of inertia close to an ellipsoid of rotation) the area of the
zone which contains the point
1
A is small with respect to half of the area of the
ellipsoid, hence the considered measure is small, the stability of the rotation about the
2
Ox -axis being small too.
Projecting the pole
P of the polhode on the plane
23
Ox x at
1
P and taking into
account (15.1.15'), we notice that the angle
1
χ formed by
1
OP with the
2
Ox -axis is
given by
132
tan /χωω= (Fig. 15.11b); differentiating with respect to time, we obtain
(
()
2
111
dtan /d 1 tantχχχ=+
)
23 32
1
22
23
ωω ωω
χ
ωω
−
=
+
.
Using the equations (15.1.40) and then the second equation (15.1.49''), we get, finally,
()
()
2
1
11
22
23 2 3
II I
II
Ω
χω
ωω
−
=
+
.
(15.1.77)
Analogously, if
3
P is the projection of the pole P on the plane
12
Ox x , we can write
331
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
()
2
3
33
22
12 1 2
II I
II
Ω
χω
ωω
−
=−
+
(15.1.77')
for the angle
3
χ formed by
3
OP with the
1
Ox -axis (Fig. 15.11a). It results that
11
sign signχω=
and
33
sign signχω=−
. Let us suppose firstly that the stationary
rotation takes place counterclockwise (positive sense) about the
1
Ox -axis, so that
1
0ω > , hence that
1
0χ >
too; in the perturbed motion, the instantaneous axis of
rotation will be rotated about the
1
Ox -axis in the same sense, so that the pole P will
describe the polhode which surrounds the point
1
A counterclockwise too. If the
permanent rotation takes place about the
3
Ox
-axis, counterclockwise (positive sense)
too, so that
3
0ω >
, hence
3
0χ >
, then, in the perturbed motion, the instantaneous
axis of rotation will rotate about the
3
Ox
-axis clockwise (negative sense). Obviously,
we obtain similar results if we take
1
0ω <
or
3
0ω <
(see Fig. 15.10 too). Hence, we
can state
Theorem 15.1.12 The permanent rotations about the minor axis and about the major
axis, respectively, of the ellipsoid of inertia corresponding to the fixed point are
different because, in the perturbed motion, the pole of the instantaneous axis of rotation
describes a polhode in the same sense as the rotation of the rigid solid, in the first case,
and in the opposite sense with respect to the rotation of the rigid solid, in the second
case, respectively.
This result can be easily put in evidence with the aid of Maxwell’s top.
15.1.2.8 Case of an Ellipsoid of Inertia of Rotation
In case of an ellipsoid of inertia of rotation (we suppose that the axis of rotation is the
major axis of the ellipsoid,
12 3
IIJII==>>), of equation
()
22 2 2
12 33
Jx x Ix K++ =,
(15.1.78)
the system of equations (15.1.40) is reduced to (we suppose that
0
3
0ω > )
12
0pωω−=
,
21
0pωω−=
,
0
33
ωω= ,
0
3
constω = ,
()
3
0
3
1
I
p
J
ω=− .
(15.1.79)
We get thus
2
11
0pωω+=
,
2
22
0pωω+=
.
(15.1.79')
It results (we are in the case
2
II< , while 0k = , the elliptic functions becoming
circular ones)
() ()
00
11 02 0
() cos sintptt pttωω ω=−+−,
() ()
00
22 01 0
() cos sintptt pttωω ω=−−−,
(15.1.79'')
332