Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


15 Dynamics of the Rigid Solid with a Fixed Point
sphere, and the curve
p
C , invariably linked to the spherical figure mentioned above;
the motion of the spherical figure
F is obtained by rolling without sliding of the curve
p
C over the curve
h
C .
15.1.1.2 Kinetical Considerations
In case of the rigid solid with a fixed point we have
O
′
=
v0, so that the velocity of the
mass centre
C is given by (see the results in Sect. 14.1.1.5)
C
′
=×
v ω
ρ
,
(15.1.5)
and the momentum of the rigid solid will be expressed in the form
M
′
=×H ω
ρ
.
(15.1.6)
We notice that
constρ==
ρ
, the centre C describing a curve situated on the sphere
()
0,ρ ; in this case, the magnitudes
C
′
v and
′
H are in direct proportion to ρ.
As well, we obtain the moment of momentum
OO
O
′
′′
==
KKIω ;
(15.1.7)
making
OC≡ , we notice that this formula is identical with the formula (14.1.26'),
which takes place in the case of a free rigid solid. This result was to be expected,
because we have seen that the general motion of a free rigid solid can be studied in two
steps: (i) the motion of the mass centre
C as a free particle at which is concentrated the
whole mass
M of the rigid solid; (ii) the motion (rotation) of the rigid solid about the
centre
C (considered as a fixed point). Hence, if we take OC≡ , then our study is
useful for the second step of the mentioned general problem too. In this case,
= 0
ρ
,
hence
C
′
=
v0 and
′
=H0, while the formula (15.1.7) is reduced to the formula
(14.1.26').
The kinetic energy is given by
()
11
22
OO
T
′′
=⋅ =⋅
KIωωω,
(15.1.8)
and we can use all the considerations in Sect. 14.1.1.6; if
OC≡ , then we can write
()
11
22
CC
T
′′
=⋅ =⋅
KIωωω.
(15.1.8')
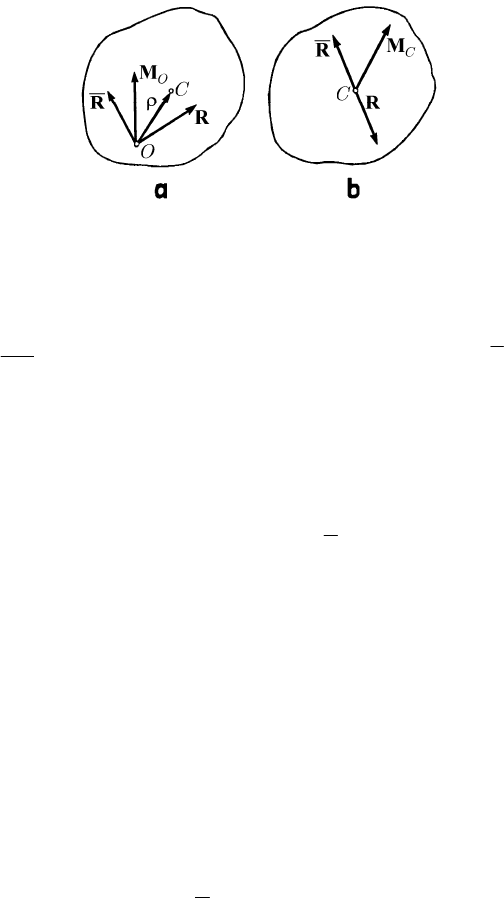
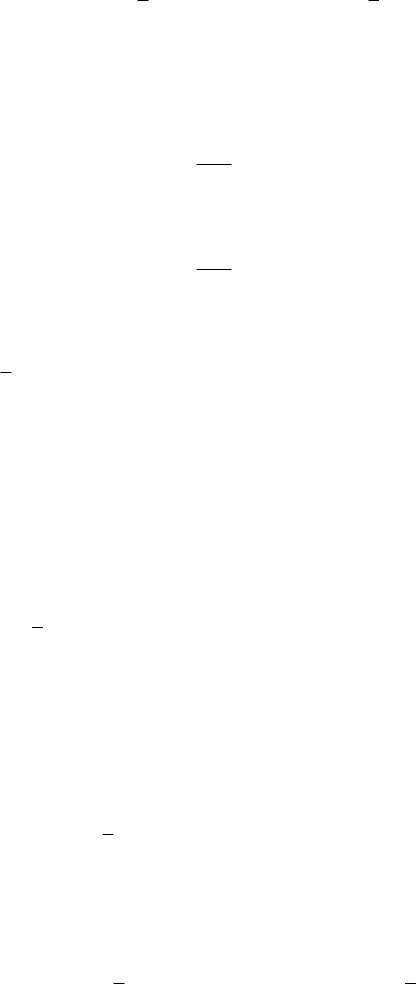
Besides the torsor
{
}
,
O
RM of the given forces, we introduce the constraint force
R , applied at the fixed point O; we notice that
O
=M0 (Fig.15.3a). In this case, the
elementary work of the given external forces is given by
283
MECHANICAL SYSTEMS, CLASSICAL MODELS
dd
O
Wt
′
=⋅
M ω ,
(15.1.9)
while the elementary work of the external constraint forces vanishes; as well, the power
of the given forces is of the form
O
P
′
=⋅
M ω .
(15.1.9')
Fig. 15.3 The rigid solid with a fixed point acted upon by arbitrary external forces;
the case O distinct from C (a) and the case
OC≡
(b)
The vector equations of motion (14.1.60), (14.1.60') become (see Sect. 14.1.2.2 too)
()
()
[]
d
d
C
CCC
MM M M
t
′
′′′
= = +× = ×+× × = +
v
avv RRωωρωωρ
, (15.1.10)
()
OOO
+× =
IIMωω ω ,
(15.1.11)
where
/
CC
t∂∂
′′
=
vv is the derivative of the velocity
C
′
v with respect to time, in the
frame of reference
R. In components, along the axes of the non-inertial frame R we
can write
[
]
()
2
i
jji i
Ci ijk k
j
Ma M R Rωρ ωω ρ
′
=∈ + =+
, 1, 2, 3i = ,
(15.1.10')
()
j
kl ik l ijk l Oi
IMδω ωω+∈ =
, 1, 2, 3i = ;
(15.1.11')
with respect to the principal axes of inertia, we obtain Euler’s equations (taken again by
Lagrange, Poisson, Poinsot, P. Saint-Guilhem, R.B. Hayward, J.C. Maxwell, G.
Schmidt, P.V. Harlamov etc.)
()
11 3 2 23
1
O
III Mωωω+− =
,
()
22 1 3 31
2
O
III Mωωω+− =
,
()
33 2 1 12
3
O
III Mωωω+− =
,
(15.1.11'')
where
123
III≥≥ are the principal moments of inertia relative to the pole O.
Assuming that
OC≡
, the equation (15.1.11) becomes (Fig. 15.3,b)
+=RR0,
(15.1.10'')
284
15 Dynamics of the Rigid Solid with a Fixed Point
as in the static case, while the equation (15.1.11) takes the form (14.1.48).
We can express the kinetic energy also in the form
()
222 2
11 22 33
11
22
TIII I
Δ
ωωω ω
′
=++=,
(15.1.8'')
where we have reported to the principal axes of inertia and to the instantaneous axis of
rotation
Δ, respectively (along the direction of the vector ω).
The theorem of kinetic energy (14.1.66) reads
d
d
O
T
t
′
=⋅M ω
,
(15.1.12)
and if the fixed point is just the mass centre, then we have
d
d
C
T
t
′
=⋅M ω
.
(15.1.12')
In components, along the principal axes of inertia, it results
()
111 222 333 1 2 3
123
1
2
OO O
II I MMMωω ωω ωω ω ω ω++ =++
,
(15.1.12'')
while if
OC≡ , then we become the formula (14.1.49').
Sometimes it is useful that the non-inertial frame of reference
R with the pole at O
have a rotation Ω with respect to the rigid solid (not being rigidly connected to it);
obviously, in this case the equations of motion given by the general theorems have a
more intricate form, as it was mentioned in Sect. 14.1.1.4.
Using Euler’s angles and the relations (5.2.35), we can express the kinetic energy
(15.1.8'') in the form
()()
22
12
1
sin sin cos sin cos sin
2
TI I
ψθϕθϕ ψθϕθϕ
⎡
′
=++−
⎣
()
2
3
cosI ψθϕ
⎤
++
⎦
(15.1.13)
too. If the
O3-axis is a kinetic axis of symmetry of the rigid solid (the ellipsoid of
inertia is of rotation), then we have
12
IIJ== (important case in applications) and
we obtain the remarkable formula
()
()
2
22 2
3
1
sin cos
2
TJ I
ψθθ ψθϕ
⎡⎤
′
=+++
⎣⎦
.
(15.1.13')
We notice that, in this case,
//0TT∂∂ψ∂∂ϕ==. If the ellipsoid of inertia is a
sphere (
123
IIII===), then we get
()
22 2 2
11
2cos
22
TI I
ψθϕ ψϕθ ω
⋅
′
=+++ =
,
(15.1.13'')
285
MECHANICAL SYSTEMS, CLASSICAL MODELS
in conformity to the formula (15.1.4).
Taking into account the results in Sect. 14.1.1.6 (e.g., the formula (14.1.31)), we can
write
ddd
OO
T
′′ ′
=⋅=⋅KKωω .
(15.1.14)
Observing that the ellipsoid of inertia is the locus of the points
P for which the position
vector
OP
is given by (see the formulae (14.1.32) and (15.1.8''))
2
K
OP
T
=
′
ω ,
(15.1.15)
we obtain
d0
O
OP
′
⋅=
K ; we can thus state that the moment of momentum
O
′
K
is
along the normal
OQ from O to the plane Π (
Q Π∈
), tangent to the ellipsoid of
inertia (see Fig. 3.9 too). The distance from the point
O to the plane Π is given by
vers
2
OO
O
O
O
hOQOP OP K
K
KT
′′
⋅
′
==⋅ =⋅=
′
′′
KK
K
ω
.
Taking into account (15.1.8), it results
2
O
KT
h
K
′
=
′
.
(15.1.16)
The vector
O
J associated to the moment of inertia tensor
O
I is thus defined in the
form
vers
2
OO
O
I
I
T
Δ
′
==
′
K
J ω
(15.1.17)
and is situated along the same normal
OQ. In conformity to the formula (14.1.34'),
O
JOQ K= ; the locus of the extremity P
′
of the vector
O
J
(we take
2
KRM= ,
so that
P
′
be the inverse of the point Q with respect to a sphere of centre O and of
radius
R; Fig. 3.9) is the ellipsoid of gyration. We obtain thus a graphic method for the
determination of the moment of momentum
O
′
K
.
15.1.1.3 General Methods of Computation. Case of the Heavy Rigid Solid
To determine the motion of the rigid solid with a fixed point
O, subjected to the action
of given forces of torsor
{
}
,
O
RM , as well as to the constraint force
R
(Fig. 15.3,a),
knowing its position at a given moment, we have at our disposal the vector equations of
286

15 Dynamics of the Rigid Solid with a Fixed Point
motion (15.1.10), (15.1.11) (or the equivalent equations) and the relations (5.2.35),
hence two vector equations and three scalar ones for the two vector functions
()t=ωω and ()t=RR and the three scalar functions ()tψψ= , ()tθθ= and
()tϕϕ= .
In general,
()
123
,, , , , ;
ii
RR tψθϕω ω ω= and
123
(,,, , , ;)
Oi Oi
MM tψθϕω ω ω= ,
1,2, 3i = . The six unknown scalar functions (Euler’s angles ()tψψ= , ()tθθ= ,
()tϕϕ= and the components ()
ii
tωω= , 1,2, 3i = , of the angular velocity vector
of the rigid solid) are determined by the system of differential equations (15.1.11''),
written in the normal form
()
[]
1
12323
1
11
11
O
O
MMII
II
ωωω== +−
,
()
[]
2
23131
2
22
11
O
O
MMII
II
ωωω== +−
,
()
[]
3
31212
3
33
11
O
O
MMII
II
ωωω== +−
,
(15.1.18)
and by the system of equations (14.1.53''); the initial conditions (at the moment
0
tt= )
of Cauchy type will be of the form
()
0
0
tψψ=
,
()
0
0
tθθ=
,
()
0
0
tϕϕ=
,
()
0
0
ii
tωω=
,
1,2, 3
i =
.
(15.1.19)
Starting from the Theorem 14.1.12, we can state a theorem of existence and uniqueness
of the solution.
It is interesting to see that the formulation of the problem would be more intricate
(equations (14.1.55)–(14.1.55'')) by choosing the centre of mass
C as pole of the
movable frame of reference
R.
If we determine the position of the rigid solid and the angular velocity
ω, then the
equation (15.1.10) allows to express the constraint force in the form
()
[]
M=− + × + × ×
RR ω
ρ
ωω
ρ
.
(15.1.20)
If
OC≡
, then the constraint force is
=−RR,
(15.1.20')
hence the same as in the static case (Fig. 15.3,b).
Introducing the direction cosines
i
α , 1,2, 3i = , of the
3
Ox
′
-axis with respect to the
axes of the frame of reference
R (one can pass to Euler’s angles by means of the
relations (5.2.36)), the components of the torsor of the given forces are of the form
()
123123
,,,,,;
ii
RR tαααωωω= and
()
123123
,,,,,;
Oi Oi
MM tαααωωω= ; the six
unknown functions
()
ii
tαα= and ()
ii
tωω= , 1, 2, 3i = , are determined by
Poisson’s system of geometric equations (14.1.54), written in the normal form, and by
the system of dynamic equations (15.1.18). Associating the initial conditions
287
MECHANICAL SYSTEMS, CLASSICAL MODELS
()
0
0
ii
tαα= , 1, 2, 3i = ,
(15.1.19')
to the initial conditions (15.1.19) (with which they must be compatible), we can state,
analogously, a theorem of existence and uniqueness.
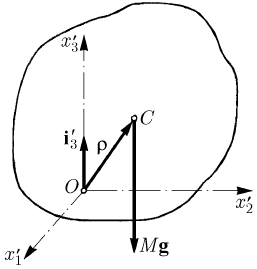
Fig. 15.4 The rigid solid with a fixed point acted upon by its own weight G
An important particular case is that in which the rigid solid is acted only by its own
weight
3
MMg
′
==−Gg i at the centre of mass C (Fig. 15.4). The equations
(15.1.11'') take the form
() ( )
11 3 2 23 32 23
III Mgωωωραρα+− = −
,
() ( )
22 1 3 31 13 31
III Mgωωωραρα+− = −
,
() ( )
33 2 1 12 21 12
III Mgωωωραρα+− = −
.
(15.1.21)
If the fixed point is just the mass centre, then Euler’s equations (15.1.21) read
() () ()
()
123
132
0
CCC
IIIωωω+− =
,
() () ()
()
231
213
0
CCC
IIIωωω+− =
,
() () ()
()
312
321
0
CCC
IIIωωω+− =
(15.1.21')
and form a system of homogeneous equations.
The latter case can be seen as a second step in the study of the motion of the free
rigid solid subjected only to the action of its own weight; the first step is represented by
the study of the motion of the mass centre, the trajectory of which is a parabola (in
particular, the local vertical; see Sect. 14.1.1.8 too).
15.1.1.4 Jacobi’s Multiplier
To determine the first integrals of the systems of differential equations considered
above, a particularly important rôle is played by Jacobi’s multiplier. We will present the
corresponding theory for a system of differential equations
288

15 Dynamics of the Rigid Solid with a Fixed Point
()
12 1
, ,..., ;
jj
n
xXxx xt
−
=
,
1,2,..., 1jn=−
.
(15.1.22)
As it was shown in Chap. 6, Sect. 1.2.2 and in Sect. 11.1.1.6, if the functions
j
X and
/
j
k
Xx∂∂, , 1,2,..., 1jk n=−, are defined and continuous in a neighbourhood V of
the point
()
00 0
01 2 1
;,,...,
n
txx x
−
, then there exists a neighbourhood ⊂VV in which
the solution of the system of differential equations (15.1.22) is obtained by means of the
first integrals
()
12 1
, ,..., ;
j
j
n
f
xx x t C
−
= , const
j
C = , 1,2,..., 1jn=−.
(15.1.23)
We can set up at the most
1n − independent first integrals; we say that the first
integrals
{
}
, 1,2,..., 1
k
f
kn=− form a fundamental system of first integrals if they are
of class
1
C with respect to all variables (
k
x , 1,2,..., 1kn=−, and t), the
corresponding functional determinant being non-zero.
()
()
12 1
12 1
, ,...,
det 0
, ,...,
n
n
f
ff
xx x
∂
∂
−
−
⎡⎤
≠
⎢⎥
⎣⎦
.
(15.1.23')
The initial conditions of Cauchy type allow the determination of the constants
j
C ,
1,2,..., 1jn=−, the solution
()
12 1
;,,...,
jj
n
xxtCC C
−
= ,
1,2,..., 1jn=−
(15.1.22')
thus obtained being unique.
In a study of the problem of first integrals it is convenient to denote
n
tx= (t has no
more a privileged position), the system of differential equations (15.1.22) being written
in the form (
1
n
X = )
12
12
dd
d
...
n
n
xx
x
XX X
===
.
(15.1.24)
Thus, a function
()
12
, ,...,
n
f
fxx x= is a first integral of the system (15.1.22) if
1
dd0
n
j
j
j
f
fx
x
∂
∂
=
==
∑
.
(15.1.25)
Taking into account (15.1.24), we can write this condition in the form
0
f
=D ,
1
n
j
j
j
X
x
∂
∂
=
=
∑
D .
(15.1.25')
289
MECHANICAL SYSTEMS, CLASSICAL MODELS
We notice that the system (15.1.24) is just the characteristic differential system
associated to the equation with partial derivatives of first order (15.1.25'), written by
means of the differential operator
D ; hence, we may state
Theorem 15.1.1 The relation (15.1.25') represents the necessary and sufficient
condition so that the function
f be a first integral of the system (15.1.24).
We can write (the function
f depends on the functions
k
f
, 1,2,...,km= ,
1mn≤−)
11 1 1
dd d
nm m n
kk
j
j
jj
kk
jk k j
f
f
f
f
f
xx
fx f x
∂∂
∂∂
∂∂ ∂ ∂
== = =
==
∑∑ ∑ ∑
,
as well as
1
0
m
k
k
k
f
ff
f
∂
∂
=
==
∑
DD,
(15.1.25'')
if
0
k
f
=D ,
1,2,...,km=
; it results
Theorem 15.1.2 Any function f which depends on 1mn≤− first integrals
k
f
,
1,2,...,km= , of the system of differential equations (15.1.24) is a first integral of this
system.
If the rank of the matrix
()
()
12
12
, , ,...,
, ,...,
m
n
f
ff f
xx x
∂
∂
⎡
⎤
⎢
⎥
⎣
⎦
is
1m + , 1mn<−, then the first integral f is independent of the first integrals
k
f
,
1,2,...,km= . Let us suppose now that the relations 0
k
f
=D take place for the
functions
0
k
X ≠ , 1,2,... 1kn=−, the rank of the matrix
()
()
12 1
12
, ,...,
, ,...,
n
n
f
ff
xx x
∂
∂
−
⎡
⎤
⎢
⎥
⎣
⎦
being
1n − ; the 1n − first integrals
k
f
are, in this case, independent and form a
fundamental system of first integrals
{
}
,1,2,...,1
k
f
kn=−. We have 0
f
=D and
can state
Theorem 15.1.3 A fundamental system of first integrals of the system (15.1.24) being
given, any other first integral of this system is a function of the considered fundamental
system.
The corresponding functional determinant vanishes
()
()
12 1
12
,,,...,
det 0
, ,...,
n
n
f
ff f
D
xx x
∂
∂
−
⎡⎤
==
⎢⎥
⎣⎦
.
(15.1.26)
290
15 Dynamics of the Rigid Solid with a Fixed Point
Developing Jacobi’s determinant
D after the first line, it results
1
n
i
i
i
f
D
x
∂
Δ
∂
=
=
∑
,
()
1
1
i
ii
DΔ
+
=− , 1,2,...,in= ,
(15.1.26')
where
i
D is the minor of the element /
i
f
x∂∂ of the first line, while
i
Δ is the
corresponding algebraic complement. The relations (15.1.25') and (15.1.26), (15.1.26')
are equivalent, both being the necessary and sufficient conditions so that the function
f
be a first integral of the differential system (15.1.24); hence, there exists a function
M,
called Jacobi’s multiplier, so that
ii
MXΔ = , 1,2,...,in= .
(15.1.27)
The relation
Mf D=D
(15.1.27')
takes place too.
Together with Jacobi, we consider the determinant
12
11 12 1
1,1 1,2 1,
n
n
nn nn
aa a
uu u
U
uu u
−− −
=
…
…
…………
…
,
i
ij
j
f
u
x
∂
∂
=
, const
j
a = ,
where
1,2,..., 1in=−, 1,2,...,jn= ; using the above notations, we can write
1
n
j
j
j
UaΔ
=
=
∑
,
wherefrom
/
j
j
UaΔ∂∂=
, 1,2,...,jn= . Noting that
j
Δ
depends on
j
x by means of
the quantities
ik
u , 1,2,..., 1in=−, 1,2,...,kn= , kj≠ , we have
2
11
11 11
nn nn
jj j
ik i
jjj
ik ik k
ik ik
u
f
xuxuxx
∂Δ ∂Δ ∂Δ
∂
∂
∂∂∂∂∂∂
−−
== ==
==
∑∑ ∑∑
, kj≠ , 1,2,...,jn= ,
so that
22
11
1111 111
nnnn nnn
jj j
ii
jj j
ik k ik k
jjik ijk
f
f
xuxxuxx
∂Δ ∂Δ ∂Δ
∂∂
∂∂∂∂∂∂∂
−−
==== ===
==
∑∑∑∑ ∑∑∑
2
1
111
1
2
nnn
j
ki
ij j
ik k
ijk
f
uuxx
∂Δ
∂Δ
∂
∂∂∂∂
−
===
⎛⎞
=+
⎜⎟
⎝⎠
∑∑∑
2
22
1
111
1
2
nnn
i
jij j
ik k k
ijk
f
UU
ua ua xx
∂
∂∂
∂∂ ∂∂ ∂∂
−
===
⎛⎞
=+
⎜⎟
⎝⎠
∑∑∑
,
291
MECHANICAL SYSTEMS, CLASSICAL MODELS
kj≠
,
where we took the symmetric part of the parenthesis with respect to the indices
j and k
(the contribution of the corresponding antisymmetric part vanishes) and where we took
into account the expression of the algebraic complement
j
Δ . Let us consider now, in
the determinant
U, the minor of second order formed by the lines 1 and i and by the
columns
j and k, that is
j
k
j
ij
ik k
ij
ik
aa
au au
uu
=−
.
The determinant considered above will be thus of the form
()
jij
ik k
UauauUU
′′′
=− +, jk≠ ,
where the algebraic complement
U
′
of this minor does not contain any of the elements
,, ,
jij
kik
aau u, while U
′′
may depend at the most linearly on these elements. In this
case,
22
0
jij
ik k
UU
UU
ua ua
∂∂
∂∂ ∂∂
′′′
+=−=
,
and one obtains Jacobi’s identity in the form
1
0
n
i
i
i
x
∂Δ
∂
=
=
∑
.
(15.1.28)
Taking into account (15.1.27), one gets the equation of Jacobi’s multiplier in the
form
()
1
0
n
i
i
i
MX
x
∂
∂
=
=
∑
(15.1.29)
or in the form
()
1
ln 0
n
i
i
ii
i
X
XM
xx
∂
∂∂
=
∂
⎡⎤
+=
⎢⎥
⎣⎦
∑
.
(15.1.29')
Writing the latter condition for two multipliers
1
M and
2
M and subtracting the two
relations thus obtained one from the other, we get
11
22
1
ln ln 0
n
i
i
i
MM
X
xM M
∂
∂
=
⎛⎞
==
⎜⎟
⎝⎠
∑
D .
292