Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

()
()
22
1
1
C
IMR MR FRωλω+=+ =+
M ,
m
M
λ =
,
2
C
I
m
R
=
,
whence, by integration,
()
1
0
2
1
FR
t
MR
ωω
λ
+
=+
+
M
,
()
1
0
1
CC
FR
vv t
MRλ
+
′′
=+
+
M
.
(14.2.57)
The force of sliding friction will be given by
273
14 Dynamics of the Rigid Solid
()
1
1
FR
T
R
λ
λ
−
=
+
M
.
(14.2.58)
Imposing the condition
()
2
fN f G F≤= −T , we find
1
FRλ − M
()
()
2
1 fG F Rλ≤+ − , so that the condition of rolling without sliding becomes
−≤≤+
′′′ ′′′
MM MMM,
1
FRλ=
′
M ,
()
()
2
1 fG F Rλ=+ −
′′
M .
(14.2.59)
If
1
0FR+>M , then the quantities ω and
C
v
′
are always positive, while the angular
velocity
ω (hence, the velocity
C
v
′
too) grows indefinitely, in direct proportion to time;
in case of equality (
1
0FR+=M ), the velocities ω and
C
v
′
remain constant during
the motion. If
1
0FR+<M , then the rolling takes place with an angular velocity
which diminishes in direct proportion to time till the moment
()
()
2
01
1/tMRFRλω=− + +M
, when 0ω = and 0
C
v
′
= ; for tt> one obtains
a rolling in the opposite sense (
0ω < ), where
r
C
MM=+M is taken (because the
moment of rolling friction is opposed to the motion). If
1
rr
C
MMFRM−≤ + ≤ and
0
0ω = , then the cylinder remains at rest.
In the case in which one of the relations
<−
′′′
MM M
,
>+
′′′
MM M
(14.2.60)
takes place, we must assume that
()
2
fN f G F== −T , having to do with a rolling
without sliding; in this case, the equations (14.2.54), (14.2.54') lead to
()
0
1
1
CC
vv FTt
M
′′
=+ − ,
()
0
1
C
TR
I
ωω=+ +M .
(14.2.61)
We suppose that
0
I
v
′
= at the initial moment; but at a moment t takes place the
relation (14.2.53'). We obtain thus the relation (we notice that we have a relation of the
form (14.2.53) at the initial moment)
()
1
I
vt
mR
′
=−+
′′′
∓MM M
,
(14.2.62)
where we have used the relations introduced above; the double sign corresponds to the
sense of the force of sliding friction
T, obtaining thus 0
I
v
′
> or 0
I
v
′
< , as the sign −
(for
T in a sense opposite to the motion, as in Fig. 14.22) or the sign
+ is taken,
respectively. Hence, if the first relation (14.2.60) is taken, then the motion involves a
sliding of velocity
0
I
v
′
> on the
1
Ox
′′
-axis, while – in case of the second relation
(14.2.60) – the sliding velocity is
0
I
v
′
< .
274
MECHANICAL SYSTEMS, CLASSICAL MODELS
If
0
0
I
v
′
≠ , then the relation (14.2.53') takes place at the initial moment too. Because
I
v
′
is a function continuous in time, it must have the same sign as
0
I
v
′
, at least for small
values of t. On the same way, we can write
()
()
00
00
1
for 0,
1
for 0.
II
I
II
vtv
mR
v
vtv
mR
⎧
′′
+−+− >
⎪
′
=
⎨
⎪
′′
+−++ <
⎩
′′′
′′′
MM M
MM M
(14.2.62')
Firstly, let us suppose that
0
0
I
v
′
> . If ≤−
′′′
MM M
, then we have, 0
I
v
′
> for
any time, while if
>−
′′′
MM M
, then 0
I
v
′
> at the initial moment and it is
diminishing and then vanishing for
0
/( )
I
tmRv
′
=−+
′′′
MM M; thus, we come
back to the case considered before (
0
0
I
v
′
=
), taking the moment tt= as initial
moment. Let be now
0
0
I
v
′
< . If
≥+
′′′
MM M
, then 0
I
v
′
< at any moment t,
while if
<+
′′′
MM M, then 0
I
v
′
< at the initial moment and then increases till
vanishing for
0
/( )
I
tmRv
′
=− + −
′′′
MM M
; we return thus to the case
0
0
I
v
′
=
.
Finally, if
−≤≤+
′′′ ′′′
MM MMM, then takes place firstly a rolling with
sliding and then a rolling without sliding, while if
>+
′′′
MM M
or
<−
′′′
MM M, then a phenomenon of rolling with sliding takes place for any time.
In the first of these cases, the sliding velocity
I
v
′
vanishes at the moment tt= , while
the force of sliding friction has no more the absolute value fN but it is given by
(14.2.58), which leads to discontinuities both for T and for the derivatives
d/d
C
vt
′
and
ω
in the equations (14.2.54), (14.2.54'); but the velocities
C
v
′
and ω remain
continuous functions. These results can be put in connection with the study
corresponding to the drawn and motive wheel (see Chap. 4, Sect. 2.1.4).
In our study, we have assumed till now that the disc reaches the horizontal plane at
only one point I. In this case, under the action of a moment
C
M and of a tangential
force
T, we obtain the equations of motion (Fig. 14.23a)
d
d
C
v
MT
t
′
=−
,
CC
IMTRω =+
.
(14.2.63)
Taking into account the relation
C
vRω
′
=
corresponding to the phenomenon of rolling
(without sliding) and eliminating the force of sliding friction T, we obtain
()
()
22
1
CC
IMR MR Mωλω+=+ =
,
(14.2.63')
which shows that the disc begins to roll for any
0
C
M > (having 0ω >
too). In
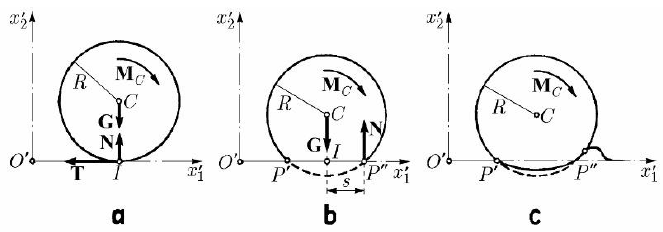
reality, the disc cannot remain perfectly rigid; it is deformed, the contact with the
horizontal plane taking place on the segment
PP
′′′
(Fig. 14.23b). Taking into account
275
14 Dynamics of the Rigid Solid
the sense of rolling of the disc, that one will effect – in fact – a motion of rotation about
the point
P
′′
, being detached from the point P
′
; we can thus assume that the normal
constraint force
N is applied at the point P
′′
, at a distance s from the support of the
own weight
G, the equation of motion being written in the form
CC
IMTRsNω =+−
, (14.2.64)
so that
()
()
22
1
CC
IMR MR MsNωλω+=+ =−=
M .
(14.2.64')
Hence, for a phenomenon of rolling it is necessary that
r
C
MsNM>=. We must
mention that, in reality, the horizontal plane is also deformed, so that – locally – the
contact zone is as in the Fig. 14.23c.
By a powercraft we mean a vehicle which is displaced by the rolling of its wheels,
put in motion by a motor (of any nature), e.g., automobile, locomotive, street motorcar,
motorcycle etc.
We, firstly, consider the departure of a powercraft (the starting, the departure from a
state of rest) with respect to an inertial frame of reference. We point our attention on a
motive wheel, assuming that it is acted upon by a driving torque of moment
C
M and
that a rolling moment
r
M arises too; we assume also that
12
0FF== (we use the
14.2.2.8 Departure and Stopping of a Powercraft
Fig. 14.23 Rolling of a rigid and of a non-rigid disc on a horizontal plane
notations in the previous subsection). At the initial moment, when the wheel is at rest,
we have
0
0ω =
,
00
0
CI
vv
′′
==. The formulae (14.2.59) lead to
0=
′
M ,
()
1 fGRλ=+
′′
M .
(14.2.65)
To can put the wheel in motion, we must have
0
r
C
MM=−>M .
If
≤
′′
MM, then the wheel begins to roll without sliding, and the motion can
continue till infinity; the angular velocity
ω grows in direct proportion to time. From the
276
MECHANICAL SYSTEMS, CLASSICAL MODELS
second formula (14.2.57) it results that in an interval of time given by
(1 ) /tMRVλ=+ M the powercraft reaches the velocity V; thus, it results
(1 )
MRV
t
λ=+M ,
(14.2.66)
hence, the moment
M of the driving couple necessary to reach the velocity V in an
interval of time equal to
t . Taking into account (14.2.65), (14.2.66), the condition
≤
′′
MM takes the form
G
Vft
M
≤
,
(14.2.67)
obtaining thus a limitation of the velocity V function of the time
t ; we notice that G is
the part of the whole weight of the powercraft which corresponds to the axle of the
wheel, M being the mass of it.
The kinetic energy of the wheel at the moment
t will be (we have /VRω = ,
()
tωω= )
()
()
2222
2
2
11 1 1
1
22 2
2
CC
TMV I IMRV MV
R
ωλ=+= + =+,
while the kinetic energy consumed by rolling friction is calculated in the form (we use
the first formula (14.2.57) and the formula (14.2.66))
()
()
2
2
2
0
1
d
22
1
t
rr
tsG MV
TMtsG
MR
λ
ω
λ
+
== =
+
∫
M
M
.
Thus, the kinetic energy consumed by the powercraft to reach the velocity V is given
by
()
()
2
1
11
2
r
sG
TTT MV
λ=+ = + +
M
.
(14.2.68)
If
>
′′
MM
, then the rolling will be accompanied by sliding and the wheel will
slip. Obviously, in this case the kinetic energy necessary to reach the velocity V in an
interval of time
t will be greater. To avoid this loss of kinetic energy it is necessary
that the inequality
≤
′′
MM
takes place; in this order of ideas, from the relations
(14.2.66) and (14.2.67) we obtain
(1 )fGRλ≤+M .
(14.2.69)
277
14 Dynamics of the Rigid Solid
Assuming that the moment
r
M of the driving couple is realized by a force F applied
tangentially at the peripheral of the wheel (
r
MFR= ) and observing that
0
tan
r
MsGGRα== we can also write (
r
C
MM=−M )
()
[]
0
tan 1FfGαλ≤++.
(14.2.70)
Neglecting the angle of rolling
0
α (e.g., in case of a locomotive), it results
()
1FfGλ≤+ , (14.2.70')
a formula particularly useful in applications.
Analogously, one can make a study of the stopping of the powercraft by braking the
wheels; in this case, we must have
0
C
MRψ=− < , where
0ψ >
is a coefficient of
the nature of a length, which corresponds to the brake slipper friction on the peripheral
of the wheel. We notice that
C
vV
′
= ,
0
/VRω = ,
0
0
I
v
′
= ,
1
0F = , hence
0=
′
M
.
If
>−
′′
MM
, then we have a rolling without sliding; the time
t necessary to
make vanishing the velocity V by deceleration will be given by the second formula
(14.2.57) in the form (we have
0
tan
r
MsNsGGRα=== )
0
(1 ) (1 ) (1 )
tan
r
MRV MRV MV
t
RM G
λλ λ
ψψα
=− + = + = +
++
M
.
(14.2.71)
If
<−
′′
MM, then the powercraft will stop by the rolling with sliding of the
wheels; the formulae (14.2.61) lead to (we have put
TfNfG==)
1
C
vV fGt
M
′
=− ,
()
1
C
fGR t
I
ωω=+ +M ,
V
R
ω =
.
In this case,
()
0
tan
CC
IIV
MV
t
G
fGR R fGR
ω
λ
ψα
′
=− =− =
+
++
MM
,
MV
t
fG
′′
=
(14.2.72)
represents the interval of time after which the linear velocity
C
v
′
and the angular
velocity
ω, respectively, vanish; it results
(1 )fGR
MV
tt
fG
fGR
λ++
′′ ′
−=
+
M
M
.
(14.2.72')
As in the case of the departure of the powercrafts, the moment M
′′
is given by
(14.2.65); from
0+<
′′
MM
we obtain (1 ) 0fGR fGRλ+<++ <MM , so that
tt
′′ ′
>
. Hence, after an interval of time
t
′
, the wheel is slipping (it does no more
rotate) with the velocity
IC
vv
′′
= till the moment t
′′
when 0
IC
vv
′′
==, and the
powercrafts stops.
278
MECHANICAL SYSTEMS, CLASSICAL MODELS
If we use simplified models (the modelling as particles), for the powercraft and for
the wheel in the interval of time
t
′′
in which the wheel is slipping and if GMg=
(corresponding to the powercraft), we can write (
0t
′
= , assuming a null peripheral
mass, hence
0λ = )
V
t
fg
′′
=
.
(14.2.73)
The distance l travelled through in this interval of time will, obviously, be given by
2
2
V
l
fg
=
,
(14.2.73')
hence a formula of the Torricelli type. Taking
2
9.806 m/sg =
and assuming a
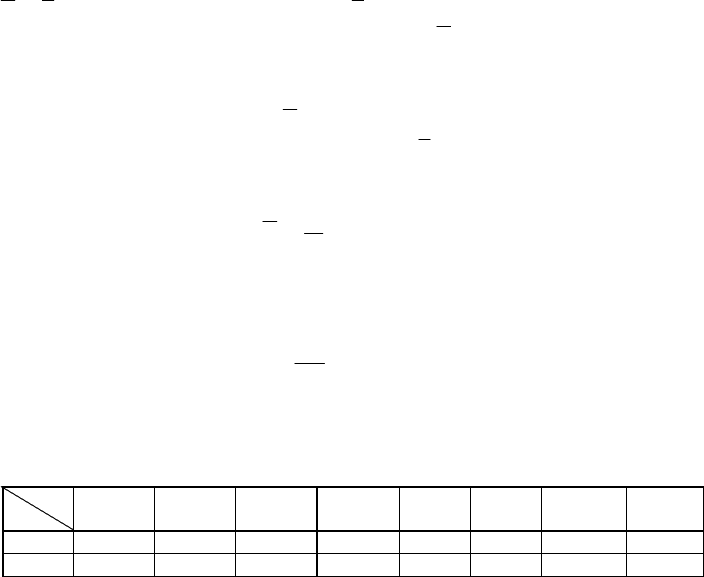
Table 14.1
V
f
30 40 50 60 70 80 90 100
0.3 11.80 20.98 32.79 47.21 64.26 83.93 106.22 131.14
0.6 5.90 10.49 16.39 23.61 32.13 41.97 53.11 65.57
coefficient of friction
0.3f =
for a wet ground and a coefficient of friction
0.6f =
for a dry ground, we give in Table 14.1 the braking distance l in m for various values
of the velocity V in km/h.

Chapter 15
Dynamics of the Rigid Solid with a Fixed Point
The frictionless motion of a rigid solid about a point of it, fixed with respect to an
inertial (fixed) frame of reference, is one of the basic problems in the motion of a rigid
solid, important from a theoretical point of view (as an intermediary phase in the
solution of other problems or as a problem in itself), as well as from the point of view
of practical applications. This problem has been considered for the first time in 1749 by
d’Alembert, but the final form of the equations of motion has been given by L. Euler in
1758. Subsequent researches are due to J.-L. Lagrange, L. Poinsot, S.-D. Poisson,
C.G.J. Jacobi, Ch. Hermite and Sonya Kovalevsky. Further, many other studies have
been made, which are continuing also now.
After a general study of the motion of a rigid solid with a fixed point, one considers
the most important cases of integrability of the corresponding system of differential
equations.
15.1 General Results. Euler-Poinsot Case
Using the general results which are presented, one considers the Euler-Poinsot case of
integrability, interesting both in the study of the heavy rigid solid and in the study of
other cases of loading; thus, various analytical and geometric aspects of the problem are
developed.
15.1.1 General Results
In what follows, one makes firstly some preliminary considerations; general methods of
computation are then presented, using the theory of the last multiplier, as well as the
most important cases of integrability.
15.1.1.1 Kinematical Considerations
Fixing one of the points of the rigid solid
S, the number of degrees of freedom of it is
reduced to three, corresponding to the three components of the rotation vector applied
at the fixed point. Obviously, this point is chosen as pole
O
′
of the inertial frame of
reference
′
R
; as well, without any loss of generality, the pole O of the non-inertial
frames
R and R can be situated at the same point OO
′
≡ (hence,
O
′
=r0
), so that
≡
′
RR
(the frame R being inertial too).
The position of the frame of reference
R (hence, of the rigid solid) with respect to
the frame
′
R
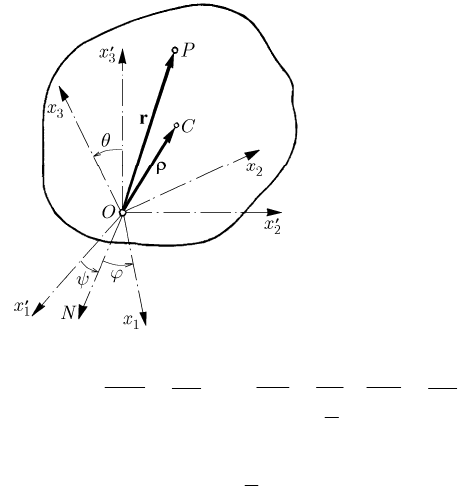
is specified by Euler’s angles: ()tψψ= , 02ψπ≤< , ()tθθ= ,
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009
279
MECHANICAL SYSTEMS, CLASSICAL MODELS
0 θπ≤≤, and ()tϕϕ= , 02ϕπ≤< (Fig. 15.1); as a matter of fact, these angles
can be considered as components of the rotation of the rigid solid about the fixed point.
Indeed, be PQ a segment of a line which belongs to the rigid solid, situated in the
position
PQ
′′
with respect to the frame
′
R
, at the initial moment at which the frame
R coincides with the frame
′
R
; after the motion of the rigid solid about the fixed
point, the frame
R reaches the actual position, while the segment of a line PQ has
another position with respect to the frame
′
R
, but the same position with respect to
Fig. 15.1 The fixed and movable frames of reference. Euler’s angles
the frame
R. Obviously, we have PQ PQ
′′
=
and OP OP
′
= , OQ OQ
′
=
. The
plane
P
Π , normal to the segment of a line PP
′
at its middle
P
, passes through the
point
O, being a plane of symmetry for the isosceles triangle POP
′
; the plane
Q
Π ,
normal to the segment of a line
QQ
′
at its middle Q , has the same property. The
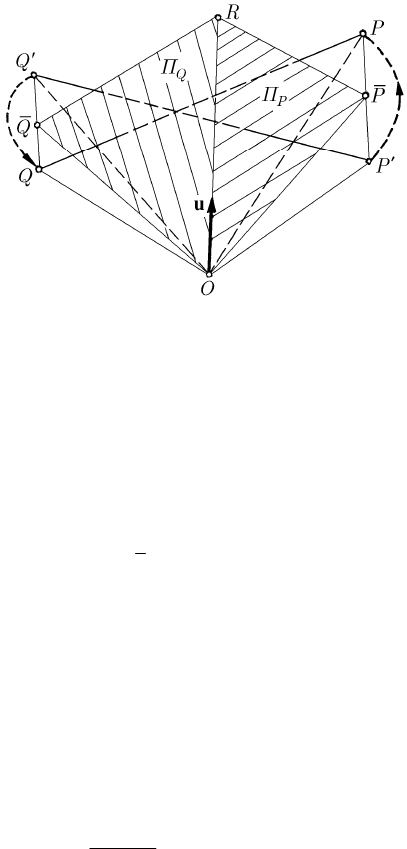
intersection of the two planes is a line
OR (Fig. 15.2). Because of symmetry reasons
with respect to the plane
P
Π , we have
POR POR
′
= ; analogously, we can write
Q OR QOR
′
= . But, by means of the considered motion, the point P
′
reaches the
point
P, while Q
′
reaches the point Q, the angles
POR
′
and
QOR
′
remaining
invariant; the straight line
OR remains fixed with respect to the frame
′
R
during the
motion, so that it is an axis of rotation. We find thus again Euler’s Theorem 14.1.1,
which can be applied in the case of a finite rotation, as well as in the case of an
instantaneous one.
Hence, one passes from the frame of reference
′
R
to the frame R by a rotation of
angle χ about an axis of unit vector u; this motion can be represented in various forms
(see Sects. 14.1.1.1-14.1.1.3). Denoting
OP
′′
=
r
and OP =
r
and using the results in
Sect. 14.1.1.1, we can write (see Fig.14.3 too)
280
15 Dynamics of the Rigid Solid with a Fixed Point
cos ( )(1 cos ) sinχχχ
′′ ′
=+⋅−+×
rr ru uur .
(15.1.1)
Fig. 15.2 Passing from the frame of reference
′
R to the frame R
Projecting on the axes of the frame
′
R
, we obtain the transformation matrix α of
components (
′
=
rrα ,
iijj
xxα
′
=
,
ij i j
α
′
=⋅
ii, ,1,2,3ij= )
cos (1 cos ) sin
ij ij i j
ijk k
uu uαδ χ χ χ=+−−∈ , ,1,2,3ij= .
(15.1.1')
Calculating the trace of this tensor, the rotation angle χ will be given by (
1
kk
uu = )
()
1
cos 1
2
ll
χα=−,
(15.1.2)
corresponding to the considerations in Sect. 14.1.1.1. Noting that
j
kjkll
×=∈ii i,
,1,2,3jk= , and projecting on the axes of the frame
′
R
, it results
mj
ijk mk lmn li
αα α∈=∈
,
,, 1,2,3imn= . Taking into account the relation
ij
ik jk
αα δ= ,
,1,2,3jk=
, too, we get
[][]
232
jj
kk ll
j
kjk
αα α α α−=− , wherefrom
()
2
1/4 1
ll
α −≤; the formula (15.1.2) leads thus always to acceptable values for the
angle
χ. Considering the antisymmetric part of the tensor (15.1.1'), we obtain,
analogously,
2sin
ijk jk
i
u
α
χ
∈
=−
, 1, 2, 3i = .
(15.1.2')
Hence,
sin χ−u is the vector associated to the antisymmetric part of the tensor α.
Knowing the matrix α, we can determine the rotation of angle
χ about the axis of unit
vector u; as we have seen in Sect. 14.1.1.2, this representation is multiform. Even if we
restrict ourselves to the interval
[
]
0,2π , the relation (15.1.2) leads to the values χ and
2πχ− (distinct values, excepting the particular case χπ= ); from (15.1.2') one
281

MECHANICAL SYSTEMS, CLASSICAL MODELS
obtains the components
i
u and
i
u− , respectively, in fact the same rotation otherwise
represented.
Denoting
1
sin
2
u
χ
λ = ,
2
sin
2
u
χ
μ = ,
3
sin
2
u
χ
ν = , cos
2
χ
ρ =
,
(15.1.3)
we find again the representation (14.1.6) of the matrix α.
The rotation velocity of the movable frame of reference
R, rigidly linked to the
solid, with respect to the fixed frame
′
R
, is characterized by the angular velocity
vector
()t=ωω, which is expressed, by means of Euler’s angles ψ, θ, ϕ, in the vector
form (5.2.34) and, in components, in the form (5.2.35), with respect to the frame
R, or
in the form (5.2.35'), with respect to the frame
′
R
; we mention also the inverse
relations (14.1.15) and (14.1.15'), respectively (see Sect. 14.1.1.4 and Fig. 14.1 too).
Introducing the functions
()
ii
tαα= , 1, 2, 3i = , which represent the direction cosines
of the
3
Ox
′
-axis with respect to the movable frame R, we obtain the relations (5.2.36)
and (14.1.16). The functions
i
α and
i
ω are linked by the differential relations (5.2.37')
(see Chap. 5, Sect. 2.3.3). The accelerations distribution will be of the form (5.2.38),
the fixed point being the only one of null acceleration. We remark also that the motion
is reduced to a finite rotation if and only if the vectors
ω and ω are collinear or if
=
0ω . Noting that
2
ii
ωωω= , we get
2222
2cosωψθϕ ψϕθ=+++
.
(15.1.4)
The fixed and movable axoids are two tangent cones, with the vertices at the fixed
point (Poinsot’s cones); the motion of the rigid solid with a fixed point will be thus
characterized by the rolling without sliding of the polhodic (movable) cone
p
C over the
herpolhodic (fixed) cone
h
C (see Fig. 5.16 too). Let
i
ω ,
1,2, 3i =
, be the components of
the vector ω in the frame of reference
R ; an arbitrary point P on the support of the vector
ω has the co-ordinates
ii
x λω= , 1, 2, 3i = , λ scalar, with respect to this frame.
Replacing in the relations (5.2.35) and eliminating the parameter
λ and the time t
between these three relations, we obtain the equation of the polhodic cone with respect
to the non-inertial (movable) frame
R. Analogously, we denote by
i
ω
′
, 1,2, 3i = , the
components of the same vector ω with respect to the frame
′
R
; the point P will have
the co-ordinates
ii
x λω
′′
= , 1, 2, 3i = . We replace then in the relations (5.2.35') and
eliminate the parameter
λ and the time t between these three relations; we get thus the
equation of the herpolhodic cone with respect to the inertial (fixed) frame
′
R
.
The points of the rigid solid which are situated on a sphere of centre
O form a
spherical figure
F, of invariable form, movable on this sphere. The traces of the cones
h
C and
p
C of vertex O on this sphere are two curves: the curve
h
C , fixed on the
282