Светуньков С.Г. Методы социально-экономического прогнозирования. Том II
Подождите немного. Документ загружается.

70
дет наилучшим способом прогнозировать следующее прогнозное значение на
шаге T+1. А если прогнозисту необходимо выполнить прогноз не на один шаг
вперѐд, а, например, на десять, то есть спрогнозировать показатель в момент
времени T+10? Действительно, для такой цели метод Брауна представляется
непригодным. Но на самом деле есть простой способ использования метода
Брауна для поставленной задачи.
Поскольку метод Брауна применим для процессов, не имеющих тенден-
цию к росту или снижению, то есть он использует способ вычисления скользя-
щей средней, то можно с помощью этого метода оценить скользящую среднюю
и через два, и через три, и через десять наблюдений. Но для этого необходимо
определить оптимальное значение постоянной сглаживания.
Пусть перед прогнозистом стоит задача выполнить прогноз не на один шаг
вперѐд, а на два шага. Модель Брауна в этом случае будет выглядеть так:
2
ˆˆ
(1 )
T T T
Y Y Y
. (2.2.1)
Выбор оптимального значения постоянной сглаживания осуществляется
следующим образом. Задаѐтся некоторое значение постоянной сглаживания,
равное, например, 0,1. Подставляя это значение в (2.2.1), рассчитывают про-
гнозные значения ряда на всей имеющейся у прогнозиста базе. От фактических
значений отнимаются расчѐтные, тем самым вычисляются ошибки ретропрог-
ноза. После того, как расчѐты выполнены по всей базе, вычисляется некоторая
обобщѐнная оценка точности прогноза методом Брауна при этой постоянной
сглаживания. Затем задаѐтся другое значение постоянной сглаживания, напри-
мер, 0,2. Вновь запускается процедура ретропрогноза при этой постоянной
сглаживания и вычисляется обобщѐнная характеристика точности прогноза мо-
дели на два шага вперѐд. Проведя расчѐты в допустимой области изменения по-
стоянной сглаживания от нуля до двух, выбирают то значение, при котором
достигается наивысшая точность ретропрогноза. Обозначим для определѐнно-
сти это наилучшее значение постоянной сглаживания как α
2
. Тогда, подставляя
это значение постоянной сглаживания, с помощью метода Брауна на имеющем-
ся множестве делаем прогноз на два наблюдения вперѐд.
Если перед прогнозистом стоит задача выполнить прогноз на три наблю-
дения, то модель Брауна будет для такого случая иметь вид:
3
ˆˆ
(1 )
T T T
Y Y Y
. (2.2.2)
Здесь оптимальное значение постоянной сглаживания находится точно
также, как это было описано выше. Найдя это оптимальное значение постоян-
ной сглаживания для прогноза на три шага вперѐд α
3
, прогнозист легко может
по имеющимся у него значениям выполнить прогноз показателя на три наблю-
дения вперѐд.
И вообще, если перед прогнозистом стоит задача выполнить прогноз на η
наблюдений вперѐд, то модель Брауна будет для этого случая записана так:
71
ˆˆ
(1 )
T T T
Y Y Y
. (2.2.3)
Для использования этой модели необходимо описанным выше способом
найти оптимальное значение постоянной сглаживания α
η
, после чего и выпол-
няется прогноз на заданный период упреждения.
Следует отметить, что оптимальные значения постоянных сглаживания
для прогнозирования методом Брауна на различные периоды упреждения отли-
чаются друг от друга, то есть:
1 2 3
. (2.2.4)
Этот подход распространим и на различные модификации метода Брауна,
рассмотренные в предыдущей главе, если их применить для задач среднесроч-
ного прогнозирования.
Как видно, при таком подходе принцип адаптивного прогнозирования
«текущая информация более ценна для прогнозирования, чем прошлая» полно-
стью выполняется. Для среднесрочного прогнозирования при таком использо-
вании метода Брауна выполняется дисконтирование прошлых данных.
Желание совместить аппарат математической статистики с новым подхо-
дом к прогнозированию, открытым Брауном, привело к тому, что к началу 70-х
годов ХХ века появился метод дисконтирования оценок МНК, который позво-
ляет при оценивании параметров моделей учесть текущую информацию в
большей степени, чем прошлую, и приспособить модель к более поздним дан-
ным и использовать при дисконтировании веса, заданные по методу Брауна.
Делается это так.
Критерий МНК, как известно, имеет вид:
2
ˆ
min
tt
t
Q Y Y
. (2.2.5)
В соответствии с ним находятся такие оценки прогнозной модели, при ко-
торых минимизируется сумма квадратов отклонений фактических значений от
расчѐтных. Но, как уже отмечалось, для прогнозиста в случае прогноза эволю-
ционно протекающих процессов важнее более точно описать последние наблю-
дения, нежели те, которые убывают в прошлое. Поэтому и ошибка аппроксима-
ции последних наблюдений должна минимизироваться в большей степени, чем
ошибки аппроксимации в начале ряда. Логично поэтому задать этим ошибкам
аппроксимации некоторые веса v
t
так, чтобы их значения уменьшались с убы-
ванием наблюдений в прошлое:
11
... ...
T T t
v v v v
. (2.2.6)
Веса могут задаваться в числовой форме или в виде функциональной зави-
симости, но так, чтобы по мере продвижения в прошлое веса убывали.
72
Для удобства часто вводят дополнительное условие:
1
1
T
t
t
v
, (2.2.7)
но его выполнение, в отличие от ситуации метода Брауна, не является обяза-
тельным.
Возможно два варианта дисконтирования оценок МНК.
Первый вариант – когда взвешивается каждая ошибка аппроксимации, и
эта взвешенная величина подставляется в сумму квадратов МНК. Тогда крите-
рий взвешенного МНК будет иметь вид:
2
ˆ
( ) min
t t t
t
Q v Y Y
. (2.2.8)
Применение этого критерия, например, для простой однофакторной ли-
нейной модели приведѐт к необходимости решать такую систему уравнений:
2 2 2
01
2 2 2 2
01
,
.
t t t t t
t t t
t t t t t t t
t t t
v Y a v a v x
v Y x a v x a v x
(2.2.9)
Такой способ взвешивания данных о наблюдении при построении адапти-
рованных моделей используют не очень часто, поскольку в полученной системе
уравнений не ясен смысл взвешивания различных сумм, т. к. веса везде пред-
ставлены квадратами.
Значительно чаще используется другой метод взвешивания, а именно
взвешиваются не сами ошибки аппроксимации, а их квадраты. Тогда критерий
МНК, взвешенного таким способом, имеет вид:
2
ˆ
min
t t t
t
Q v Y Y
. (2.2.10)
Использование этого критерия, например, для линейной однофакторной
модели приведѐт к необходимости решения системы двух таких уравнений:
01
2
01
,
.
t t t t t
t t t
t t t t t t t
t t t
v Y a v a v x
v Y x a v x a v x
(2.2.11)
В этом случае уже появляется возможность смыслового толкования урав-
нений системы. Левая часть первого уравнения, как легко заметить, при выпол-
нении равенства (2.2.7) означает вычисление взвешенной средней переменной
Y
t
, а второе слагаемое этого же уравнения представляет собой произведение ко-

73
эффициента a
1
на взвешенную среднюю переменной x
t
. В качестве дополни-
тельного «плюса» такого метода взвешенного МНК является и то обстоятельст-
во, что в правой части первого уравнения системы коэффициент a
0
умножается
на сумму весов, а она в силу (2.2.7) равна единице. Поэтому система (2.2.11)
ещѐ и упрощается.
Как задавать веса v
t
? Ответ на этот вопрос напрашивается сам собой – так,
как это сделано для краткосрочного прогнозирования Брауном, то есть:
1
, (1 ),... (1 ) ,...
Tt
T T t
v v v
(2.2.12)
Вспомним, что этот способ задания весов позволяет получить взвешенную
среднюю:
11
ˆˆ
(1 )
T T T T
Y Y Y Y
, (2.2.13)
которая в краткосрочном прогнозировании используется как лучшая прогноз-
ная оценка данного показателя Y на шаг вперѐд.
Этот же способ взвешивания, как легко убедиться из первого уравнения
системы (2.2.11), применяется и для факторной переменной x
t
:
11
ˆˆ
(1 )
T T T T
x x x x
. (2.2.14)
Поскольку для метода Брауна сумма весов равна единице, подставляя та-
кой способ взвешивания наблюдений в (2.2.11) и используя обозначения сред-
ней взвешенной, получим:
1
0 1 1
2
1 1 0 1 1 1
,
,
T
T
T T T T
Y a a x
Y x a x a x
(2.2.15)
где
11
(1 )
T T T T T T
Y x Y x Y x
, (2.2.16)
2 2 2
1
(1 )
T T T
x x x
. (2.2.17)
Такой способ более интересен и удобен, как видно не только тем, что по-
зволяет построить адаптированную к последним наблюдениям модель, но и при
появлении новых наблюдений t=T+1 легко пересчитывать коэффициенты мо-
дели.
Для успешного применения с помощью весов метода Брауна взвешенного
МНК необходимо оптимизировать постоянную сглаживания α. Эта задача ре-
шается также, как и в случае краткосрочного прогнозирования методом Брауна.
Поскольку критерий (2.2.10) является универсальным для использования
оценок взвешенного МНК, его можно использовать для оценивания коэффици-
ентов нелинейных и многофакторных прогнозных моделей.
74
Теперь воспользуемся выводами первого параграфа этой главы для того,
чтобы понять суть взвешенного МНК. Систему уравнений (2.2.11) можно полу-
чить с помощью общей схемы оценивания методом z-множителей (2.1.11), если
задать z-множители так:
1
,
.
ot t
t t t
zv
z v x
(2.2.18)
Это означает, что решая систему (2.2.11), мы получаем такие оценки ко-
эффициентов прогнозной модели, для которой выполняются условия (2.1.10),
которые применительно к рассматриваемому случаю будут иметь вид:
0,
0.
tt
t
t t t
t
v
vx
(2.2.19)
Смысл первого уравнения системы (2.2.19) очевиден, поскольку веса зада-
ны по методу Брауна и они убывают в прошлое – прогнозная модель будет опи-
сывать исходный ряд данных так, что ошибки аппроксимации, убывающие в
прошлое, будут больше, чем ошибки аппроксимации последних наблюдений.
При этом модель обязательно будет иметь как положительные, так и отрица-
тельные ошибки аппроксимации, иначе сумма взвешенных ошибок аппрокси-
мации не будет равна нулю. Модель, как следует из сказанного, хорошо описы-
вает текущие наблюдения и плохо – прошлые.
Смысл второго уравнения системы (2.2.19) менее ясен. Будет равна нулю
сумма взвешенных произведений фактических значений фактора на ошибки
аппроксимации.
Но метод z-множителей не только позволяет получить дополнительное
толкование оценкам взешенного МНК, но и, используя общий принцип учѐта
текущих наблюдений в большей степени, чем более ранние, получить новые
оценки. Например, можно задать такие z-множители:
1
,
.
ot t
t t t
zv
z vY
(2.2.20)
Тогда будет получена такая система уравнений:
01
2
01
,
.
t t t t t
t t t
t t t t t t t
t t t
v Y a v a v x
v Y a v Y a v xY
(2.2.21)
Решая эту систему, прогнозист получит оценки адаптированной модели –
ведь текущая информация используется в большей степени, чем прошлая, но
75
эти оценки будут отличаться от оценок взвешенного МНК и, возможно, в неко-
торых случаях будут давать более точные прогнозы. Ряд различных способов
дисконтирования данных, который открывает метод z-множителей, довольно
широк. Это вооружает прогнозиста новым дополнительным инструментом по-
строения адаптивных моделей среднесрочного прогнозирования.
Недостатком этого способа получения оценок прогнозной модели с помо-
щью взвешенного МНК является показательный способ задания весов ошибок
аппроксимации. Зачастую в экономике встречаются ситуации, когда наилуч-
ший способ задания весов не соответствует правилу (2.2.12), например, когда
после некоторого периода использования новых технологий предприятие воз-
вращается по различным причинам к старым технологиям. Тогда вес наблюде-
ний в прошлом, когда использовались старые технологии, не будет менее важен
для прогнозирования, чем текущие. В этом случае возможен и такой способ за-
дания весов:
1 1 1
... ...
T T t t
v v v v v
. (2.2.22)
Это тем более важно для случаев, когда прогнозные ряды имеют лаги – за-
держки во времени. Например, инвестиции в новые технологии дадут отдачу
только через период, связанный с внедрением инноваций и началом их исполь-
зования. В этой ситуации вес наблюдения в год инвестиций для прогноза может
быть больше, чем вес наблюдения в последний год. Метод z-множителей по-
зволяет устранить этот недостаток, подбирая к каждому ряду свой наилучший
способ задания множителей, но эта задача не формализована, поэтому широко
еѐ использовать на практике нельзя – еѐ успех зависит от личных качеств про-
гнозиста.
2.3. Метод стохастической аппроксимации
для адаптации эконометрических моделей
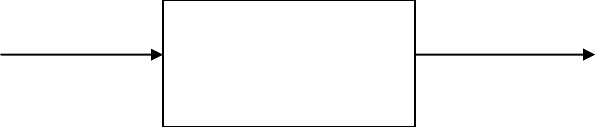
В технической кибернетике часто приходится решать задачи такого типа.
Объект управления представляет собой сложную систему, структура и взаимо-
связи между элементами которой исследователю неизвестны. Поэтому объект
представляется в виде «чѐрного ящика» (рис. 2.3.1).
Объект
исследования
Входное
воздействие
Результат
x
Y
Рис. 2.3.1. Объект исследования как «чѐрный ящик»

76
Перед исследователем стоит задача найти такое управляющее воздействие
x на систему из допустимого множества X, чтобы на выходе из нее было дос-
тигнуто некое оптимальное значение Y, численно равное наперѐд заданному U.
Как найти это управляющее воздействие? Можно использовать метод простого
перебора. Но при этом нет никакой гарантии, что решение будет найдено –
простой перебор может привести к случайному нахождению этого решения, а
может и не привести к этому. Поэтому надо использовать процедуры целена-
правленного перебора. Но поскольку зависимость между входной переменной и
выходной в явном виде неизвестна, не каждая процедура целенаправленного
перебора может использоваться для решения этой задачи. Поскольку чаще все-
го стоит задача скорейшего поиска оптимального управляющего воздействия
на объект, например, для корректировки полѐта ракеты, то надѐжность алго-
ритма и скорость поиска этого наилучшего управленческого решения являются
превалирующими.
Одним из лучших методов, приспособленных для этого, является метод
стохастической аппроксимации, суть которого впервые была опубликована в
1951 г. Г. Роббинсом и С. Монро
1
. Этот метод и стал формальным основанием
для целого ряда задач адаптации в технической кибернетике. Области примене-
ния и разновидности решения различных задач технической кибернетики с по-
мощью метода стохастической аппроксимации разнообразны. В отечественной
науке наиболее полно методы решения таких задач адаптации и управления
представлены в работах Я.З. Цыпкина
2
.
Суть метода стохастической аппроксимации заключается в следующем.
В допустимой области Х выбираем произвольное значение x[0], проводим
эксперимент с данным значением входа в систему и наблюдаем на выходе не-
которое значение Y(x[0]). Таким образом, перед исследователем есть первая па-
ра взаимосвязи между входной переменной и выходной. Если бы объект был
стационарен, можно было бы с помощью конечного множества наблюдений со-
брать такое достаточное множество пар значений {x[n],Y(x[n])}, чтобы постро-
ить регрессионную зависимость между переменными. Тогда, зная коэффициен-
ты регрессионной зависимости, можно легко решить поставленную задачу –
найти такое значение входного управляющего воздействия x, при котором на
выходе из объекта наблюдается заданное U. Но объект не стационарен и его
динамика необратима, он меняет во времени не только свои количественные
характеристики, но и собственную структуру, состав элементов и взаимосвязь
между ними, поэтому такой статистический подход не приведѐт к нужному ре-
зультату. Кроме того, если система отклоняется от некоторой траектории раз-
вития, необходимо срочно откорректировать еѐ поведение для того, чтобы вер-
нуть еѐ на прежний путь или близкий к нему. Поэтому возможности собирать
статистические данные и их анализировать на предмет выявления вида и степе-
ни взаимосвязи нет.
1
Robbins H., Monro S. A stochastic aррroximation method // Annual mmanhematics statistics. –
1951. – V. 22. – Р. 400-407.
2
См. например: Цыпкин Я.З. Адаптация и обучение в автоматических системах. – М.: Наука,
1968. – 400 с.
77
В методе стохастической аппроксимации выделяют две разновидности:
- процедура Роббинса–Монро,
- процедура Кифера–Вольфовица (в приращениях)
1
.
Применительно к задачам адаптации прогнозных моделей используется
процедура Роббинса–Монро. В соответствии с еѐ положениями, для поиска оп-
тимального управляющего значения x* выбираем убывающую с ростом n (чис-
ла испытаний) последовательность положительных чисел [n]. Необходимо за
конечное число шагов испытаний определить такое значение x*, принадлежа-
щее множеству Х, чтобы:
( *)Y x U
. (2.3.1)
Для выбора значения x в следующем эксперименте используется рекур-
рентное соотношение Роббинса–Монро:
[ ] [ 1] [ ]( ( [ 1])x n x n n U Y x n
). (2.3.2)
Разность в скобках иногда называют «функцией невязки».
Здесь положительное число [n] получило название «параметр демпфиро-
вания колебаний». Именно способ задания параметров демпфирования колеба-
ний определяет характеристики алгоритма метода стохастической аппроксима-
ции, в первую очередь, скорость его сходимости к оптимальному значению.
Теоретическим исследованиям процессов адаптации на основе алгоритма Роб-
бинса–Монро посвящено значительное число работ специалистов в области ма-
тематики и технической кибернетики. Доказано
2
, что если
2
[ ] , [ ] ,nn
(2.3.3)
то x стремится к x*.
В зависимости от способа задания параметров демпфирования колебаний
различают три различных алгоритма:
1) алгоритм адаптации с постоянным шагом:
[ ] 1n
. (2.3.4)
Например:
1
[]
2
n
;
2) алгоритм адаптации с переменным шагом, когда параметры демпфиро-
вания колебаний изменяются в зависимости от числа испытаний n:
[ ] ( )n f n
. (2.3.5)
1
Хасьминский Р.З. Стохастическая аппроксимация // Математическая энциклопедия. Т. 5. –
М.: Советская энциклопедия, 1984. – С. 235-236.
2
Вазан М. Стохастическая аппроксимация. – М.: Наука, 1972. – 295 с.
78
.
Например:
1
[]
1
n
n
;
3) алгоритм адаптации с нелинейным шагом, когда параметры демпфиро-
вания колебаний определяются таким образом, чтобы в зависимости от
конкретных величин Y[n] и x[n] при данном испытании наискорейшим
путем приблизиться к оптимуму (2.3.1):
[ ] ( , , )n F Y x n
. (2.3.6)
Например, алгоритм Качмажа для линейной многофакторной модели:
2
[ ] [ ]
[]
[]
ii
i
i
i
Y n a x n
n
xn
,
где i – число входных переменных объекта.
Первыми были использованы и исследованы на практике алгоритмы
адаптации с переменными шагом. Здесь можно предложить самые различные
способы задания параметра демпфирования колебаний, например:
[n]=1/n или
[n]= 1/n
2
и т.п.
В качестве преимущества такого подхода следует указать на его простоту
и формализм – параметр меняется только в зависимости от шага аппроксима-
ции, но не от его итогов.
Пусть перед нами стоит задача найти корень:
3
9x
.
Задаѐм функцию невязки:
3
9 [ ]F x n
.
Будем считать, что нас устраивает такое значение корня, когда функция
невязки по своему абсолютному значению не превышает η=0,1. Выберем такой
способ задания параметра γ:
1
1 n
Пусть на первом шаге исследователь задаѐт x[0]=2. Тогда в соответствии с
алгоритмом Роббинса–Монро следующее значение x[n] определится так:
3
11
[1] [0] (9 [0]) 2 (9 8) 2,5
22
x x x
.
79
.
.
Возводим x[1]=2,5 в третью степень и вычисляем модуль невязки:
|9-15,625|=6,625. Она больше заданной η=0,1, поэтому продолжаем вычисле-
ния. Следующее значение входной переменной вновь вычислим, используя ме-
тод Роббинса–Монро:
1
[2] 2,5 (9 15,625) 0,292
3
x
Возводим x[2]=0,292 в третью степень и вновь считаем невязку: |9-0,025| =
8,975, которая больше допустимой, поэтому вычисляем новое значение корня:
1
[3] 0,292 (9 0,025) 2,536
4
x
Возводим новое значение искомой переменной в третью степень и считаем
невязку: |9-16,305|. Она оказалась больше допустимой, поэтому вычисляем но-
вое значение корня на четвѐртом и последующих шагах до тех пор, пока невяз-
ка не станет меньше допустимой величины:
1
[4] 2,536 (9 16,305) 1,075.
5
x
Невязка |9-1,242|>η.
1
[5] 1,075 (9 1,242) 2,368.
6
x
Невязка |9-13,277|> η.
1
[6] 2,368 (9 13,277) 1,757.
7
x
Невязка: |9-5,424|> η.
1
[7] 1,757 (9 5,424) 2,204.
8
x
Невязка: |9-10,71|> η.
1
[8] 2,204 (9 10,71) 2,014.
9
x
Невязка: |9-8,174|> η.
1
[9] 2,014 (9 8,174) 2,096.
10
x
Невязка на этом шаге: |9-9,208|> η=0,1
1
[10] 2,096 (9 9,208) 2,076.
11
x
Невязка: |9-8,95|< η=0,1, что нас вполне
устраивает.
Итак, окончательное решение поставленной задачи: x*=2,076.
В том, что параметр демпфирования колебаний не зависит от величины
невязки и вообще определяется только шагом аппроксимации, видится недоста-
ток алгоритма с переменным шагом – моделируемые процессы могут быть са-
мыми различными по сложности, отличаясь друг от друга; первое приближение
x[0] в одном случае может быть достаточно далѐким от оптимума, а в другом –
близким к нему, а алгоритм этих особенностей не учитывает.