Stacey F.D., Davis P.M. Physics of the Earth
Подождите немного. Документ загружается.

//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
227
– [224–238] 13.3.2008 12:00PM
resulting from the main shock (Stein, 1999). This
is given by Eq. (11.36):
C
S
n
þ S
0
; (15:4)
where
S
is the limiting static friction at which
sliding begins,
n
is the normal stress and S
0
is
the cohesion. However, this (variation as 1/r
3
)has
been observed not to fit the observed 1/r variation
in frequency of occurrence with distance r from a
main shock (Felzer and Brodsky, 2006). It appears
possible that aftershocks reflect the distribution
of sub-faults, referred to above, that are caused by
the dynamic stress of the main shock.
Geodetic measurements following large
earthquakes have shown that regional strain
continues in the same directions as in the main
events with characteristic time constants rang-
ing from months to years. Some post-earthquake
strain is expected from the aftershocks, but that
is not a complete explanation. The cumulative
aftershock moment is generally one to two
orders of magnitude less than the geodetically
observed moment released after the event. Two
models are under investigation. One involves
further aseismic slip of the rupture plane itself.
The other involves slip in the lower ductile crust
resulting from the increased stress external to
the fault plane. Recently inversions of post-seismic
slip from two large Californian earthquakes
(Landers, 1992 and Hector Mine, 1998) have
shown that aseismic slip both on the fault and
below it is required to satisfy the data. The after-
slip may continue for years. Thatcher (1983) esti-
mated a time constant of 30 years for the 1906
San Francisco earthquake. The Maxwell relaxa-
tion time (for the model in Fig. 10.4(a)) is given by
M
¼ =: (15:5)
If the lower crust is relaxing over 30 years then, for
¼ 5 10
10
Pa, the viscosity of the lower crust is
¼ 5 10
19
Pa s. A zone of steady deformation of
order 200 km wide in Southern California is seen
to be overlaid by patches of more concentrated
strain change. Jackson et al. (1997) concluded that
they can be attributed to earthquake after-slip of
historic earthquakes. This complicates any
attempt to use strain observations to infer strain
build-up for future earthquakes.
Static stresses fall off with distance too rap-
idly (as 1/r
3
) to cause triggering of remote earth-
quakes. Dynamic stresses of seismic waves
diminish less rapidly, particularly for surface
waves which are spreading over a surface and
not a volume so that wave energy falls off as 1/r
and amplitude and stress as 1=
ffiffiffi
r
p
. This is why, at
teleseismic distances, surface waves dwarf the
body waves, for which amplitude decreases as
1/r. Earthquakes may be triggered by surface
waves from distant events, but this is observed
to occur only under special conditions, found in
hydrothermal or volcanic zones that are charac-
terized by high pore pressure. An example of
triggering that appears to have been a prolonged
response to dynamic stressing is seen in a several-
year period of increased seismicity in the
magmatic zone of Long Valley, California, imme-
diately following the Landers 1992 earthquake.
Long Valley is several hundred kilometres from
Landers and static stress changes from the earth-
quake would have been negligible.
15.3 Fault friction and earthquake
nucleation: the quasi-static
regime
The classical description of faulting is that faults
break when the driving shear stress is greater
than the limiting static friction, and once slip
starts the friction drops to a lower value, the
so-called dynamic friction. When the reduction
in friction with slip is greater than the reduction
in the driving stress from the surrounding elastic
medium, the fault is unstable and accelerates,
causing an earthquake. This stick–slip model of
earthquakes was prompted by laboratory obser-
vations on friction between rock surfaces.There
are several possible reasons for the difference
between static and dynamic friction. The pres-
ence of fluids introduces several possibilities and
is probably important, but there are two mecha-
nisms that do not depend explicitly on fluids.
They both represent friction in terms of the
interactions between asperities on adjacent sur-
faces subjected to a normal stress. In the static
situation with prolonged contact, asperities
15.3 THE QUASI-STATIC REGIME 227
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
228
– [224–238] 13.3.2008 12:00PM
become partly welded, and deform, increasing
the contact area and consequent friction. With
prolonged shear they may move sufficiently to
break contact so that new contacts are estab-
lished with smaller welded areas and this
reduces the friction, eventually precipitating an
earthquake. This is the essence of the rate–state
theory (Dieterich, 1979a, b, 1994). Dynamic fric-
tion, which takes over when fault motion is
established, involves different mechanisms.
Asperities brush past one another rapidly with-
out establishing welded contacts and, in doing
so, generate high-frequency elastic waves, mak-
ing the asperity interactions less effective. With
rapid motion fluid lubrication probably also
reduces the friction.
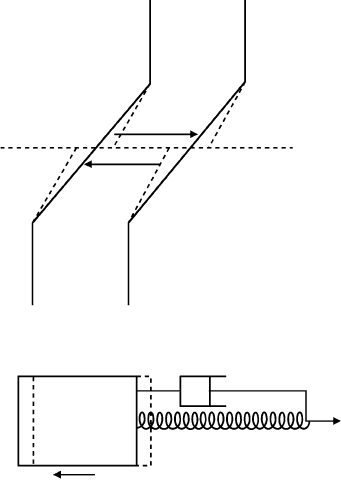
We need a dynamic model of earthquakes into
which the stick–slip (rate–state) mechanism can
be introduced. A convenient analogue is the
spring–block slider system (Fig. 15.2). Progressive
extension of the spring simulates the tectonic
motion that drives the fault movement. The
block in the figure moves intermittently, repre-
senting earthquakes. The size of the block corres-
ponds to the size of the earthquakes with a 10 km
block representing a magnitude 6 event. Let y be
the position of the block, and y
p
the position of
the driving plate. The force acting on the block,
kðy
p
yÞ, where k is the spring constant, is
opposed by the viscous force
_
y and the friction
F. The equation of motion is
m
¨
y ¼ kðy
p
yÞ
_
y F: (15:6)
This is the equation for decaying oscillatory
motion. There is a transitional phase between
static and dynamic friction in the development
of instability during which we ignore viscosity
and for which there are no inertial or dynamic
effects. This is the quasi-static regime. Now we
examine the friction term, F, in terms of rate–
state theory. Once slipping begins, the change
from static to dynamic friction does not take
place instantaneously. It requires the surfaces
to move a critical distance, D
c
, to displace inter-
acting asperities with respect to each other suffi-
ciently to erase any memory of the previous
regime. D
c
is taken as the average size of the
asperities. For this transitional, quasi-static
regime the friction depends on the time asper-
ities are in contact with one another, and there-
fore on velocity. Since plastic failure has less
time to develop than in the static case, we
have a quasi-static friction that decreases with
velocity as
Q
¼
0
a lnð
_
y=
_
y
0
Þ; for
_
y >
_
y
0
; (15:7)
where a is a constant, and
0
is the friction when
the velocity equals the reference velocity
_
y
0
. For
the static case, the friction,
S
, arising from the
plastic failure (or chemical changes) of indivi-
dual contacts increases logarithmically with time.
S
¼
0
þ a lnðt=D
c
_
y
0
Þ: (15:8)
Rabinowicz (1965) unified the concepts of tran-
sient and static friction by suggesting that the
static friction of two surfaces that have been held
together for time t should equal the friction
when they are moving at a constant velocity,
_
y ¼ D
c
=t. Then, for those asperities that are in
02y
e
y
p
0F 2y
e
y
p
FI G U R E 15.2 An earthquake is modelled as two blocks
in frictional contact that slide relative to one another. The
lower figure shows the spring–block analogue used to
investigate the effects of quasi-static and dynamic
friction. After a displacement y
e
the force exerted by the
spring equals the dynamic friction F.
228 EARTHQUAKE DYNAMICS
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
229
– [224–238] 13.3.2008 12:00PM
contact in the quasi-static case, plastic flow occurs
for the same interval of time, t.Equation(15.7)
becomes
Q
¼
0
þ a lnðt=D
c
_
y
0
Þ¼
S
,thatis
equivalent to the static case, Eq. (15.8), a conclu-
sion that has been confirmed experimentally
(Scholz, 1990).
These results can be summarized by the
rate–state friction law,
f
¼
0f
þ A lnð
_
y=
_
y
0
ÞþB lnðÞ (15:9)
where A and B are constants (of order 0.01 and
0.013). The second term, the A-term, represents
effects that increase friction with velocity in a
manner similar to viscosity. The third term,
the B-term, describes the chemical adhesion
between the asperities that increases with con-
tact time so that y is the effective time of contact.
Dieterich (1994) shows that the state variable is
given by
d ¼
_
y
0
_
y
D
c
dy: (15:10)
For steady-state creep at an arbitrary creep
rate
_
y,d=dy ¼ 0 and then Eq. (15.10) gives
¼ D
c
_
y
0
=
_
y so that the friction coefficient is
Q
¼
0f
þ B lnðD
c
ÞþðA BÞlnð
_
y=
_
y
0
Þ; for
_
y >
_
y
0
:
(15:11)
Comparing Eq. (15.7) with Eq. (15.11), we see that
a ¼ A B and
0
¼
0f
þ B lnðD
c
Þ.IfB > A then an
increase in
_
y causes a decrease in friction. This is
an unstable situation, called velocity weakening,
which is a necessary preliminary to an earth-
quake. If B < A this is a stable condition called
velocity strengthening. In earthquake regions
the boundary between zones of velocity weaken-
ing and velocity strengthening is thought to
occur at the base of the seismogenic zone mark-
ing a change in material properties, controlled
by temperature.
At high velocities, still within the quasi-static
regime, the first term in Eq. (15.10) becomes
small. If it is neglected we have ¼ expðy=D
c
Þ
and Eq. (15.9) becomes
f
¼
0f
þ A lnð
_
y=
_
y
0
ÞBy=D
c
: (15:12)
Using
f
(Eq. (15.12)) to substitute for F by F ¼ S
in Eq. (15.6), where S is area and is normal
stress, the equation of motion for the block
becomes
m
¨
y ¼ kðy
p
yÞ
0f
S AS lnð
_
y=
_
y
0
ÞþBSy=D
c
(15:13)
Since we are considering the quasi-static regime,
we assume the inertial term is zero (m
¨
y ¼ 0) and
Eq. (15.13) reduces to
0 ¼
k
AS
ðy
p
yÞþ
0f
A
þ lnð
_
y=
_
y
0
Þ
By
AD
c
(15:14)
which is a differential equation for y with the form
0 ¼ lnð
_
y=
_
y
0
ÞCy þ E; (15:15)
where C ¼
B
AD
c
k
AS
and E ¼
0f
A
ky
p
AS
are
constants. Equation (15.15) is solved by rewriting
it as
_
y=
_
y
0
¼ expðCy EÞ¼expðEÞexpðCyÞ; then
multiplying by expðCyÞdt to get two integrals,
expðCyÞdy ¼
_
y
0
expðEÞdt, which integrates to
ð1=CÞexpðCyÞ¼
_
y
0
expðEÞt þ const. The con-
stant is found by setting y ¼ 0att ¼ 0; which
gives the solution
y ¼
E
C
1
C
lnðexp E
_
y
0
CtÞ: (15:16)
Differentiating Eq. (15.16),
_
y ¼
1
exp E
_
y
0
Ct
: (15:17)
The time to instability for C > 0 is obtained by
setting the denominator in Eq. (15.17) to zero,
t
failure
¼
1
_
y
0
C
exp
0f
A
ky
p
AS
/ exp
A
;
(15:18)
where t is the shear stress. The essential conclu-
sion from this equation is that the time to failure
depends exponentially on the ratio of shear to
normal stresses. Alternatively, if C 0 this model
implies stability, which means failure at nega-
tive time, that is in that case the model is recov-
ering from a hypothetical instability in past
time.
We now use the rate–state theory to model
the behaviour of a fault in the ductile region
below the seismic zone. This is the velocity
15.3 THE QUASI-STATIC REGIME 229
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
230
– [224–238] 13.3.2008 12:00PM
strengthening condition, with (B < A) in Eq. (15.11)
(Marone et al., 1991; Hearn, 2003). Consider the
blocks in the aseismic zone which are stressed by
earthquake displacements of the overlying
blocks in the seismogenic zone above them.
They can be modelled by a similar spring–block
system to that represented in Fig. 15.2. After the
upper elastic blocks have slipped in an earth-
quake they exert a force kðy
p
yÞ on the lower
blocks that then slip aseismically along the
boundary separating them, with friction given
by Eq. (15.11), that is
Q
¼
00
0
þðA BÞlnð
_
y=
_
y
0
Þ; (15:19)
where
00
0
is the friction coefficient at the critical
velocity
_
y
0
, marking the boundary between sta-
ble and unstable states, (y
p
y) is the position of
a lower block relative to the one above, and k is
the spring constant for the force exerted by an
upper block on the lower one. As the lower block
moves, the stress decreases. The equation of
motion is given by the quasi-static version of
Eq. (15.14), which becomes
0 ¼
k
ðA BÞS
ðy
p
yÞ
00
0
ðA BÞ
ln
_
y þ ln
_
y
0
:
(15:20)
Let the initial velocity, immediately after the
earthquake, be V
c
. Then Eq. (15.20) integrates to
y ¼
A B
k
ln
kV
c
A B
t þ 1
: (15:21)
Astheseblocksmovetorelievetheirown
stresses they apply stress to the region above
and this is observed as post-seismic strain.
Hearn (2003) concluded that Eq. (15.21) gives a
satisfactory fit to geodetic observatio ns o f post-
seismic displacements following several large
earthquakes (Landers, Izmit and Hector Mine).
This model appears relevant to the effect of the
layer immediately below the seismogenic zone,
but less so for deeper material which, being
hotter, is probably better represented as a vis-
cous medium, as in Eq . (15.5). Long-term relax-
ation after large events probably includes
asthenospheric flow and accounts for l arge-
scale, long-term clustering of earthquakes
(Section 15.7).
Harmonic tremor (low-frequency micro-
earthquakes) originating at the base of the seis-
mogenic layers of the Cascades subduction zone
(Dragert et al., 2001, Rogers and Dragert, 2003)
and the San Andreas fault south of Parkfield,
California (Nadeau and Dolenc, 2005) is expli-
cable as behaviour of material just marginally
in the velocity weakening state. This means a
stick–slip type process moderated by viscosity
of fluids in the fault plane.
The critical distance D
c
for establishing a new
asperity regime as applied in Eq. (15.8) is not
identifiable in earthquake studies. Values of
microns to tens of microns are found in labora-
tory experiments, but seismic observations have
too low a resolution for its detection. The asper-
ities in the laboratory samples depend on grain
size and on the preparation of slipping surfaces.
Natural failure surfaces are much rougher, so
that D
c
is expected to be larger.
The maximum displacement of an equi-
dimensional crack of radius l, responding to a
shear stress , is obtained from Eq. (15.3), with
D ¼, x ¼0, c ¼l,as
D
c
¼ l=: (15:22)
We can relate this to the seismic moment and
hence micro-earthquake magnitude that such a
displacement would represent. For a stress drop
D in medium of rigidity , the moment corres-
ponding to D
c
is
M
0
¼ D
c
l
2
¼ l
3
; (15:23)
so that l ¼ M
0
=ðÞ
1=3
. This imposes a minimum
size on the magnitudes of earthquakes that
can be triggered by the rate–state process. The
Gutenberg–Richter number–magnitude relation-
ship (Eq. (14.39)), is linear down to at least
M
W
¼ 0 (Section 14.7), corresponding to M
0
¼
1:3 10
9
Nm. For D ¼5 MPa, l ¼6.3 m and there-
fore with ambient shear stress ¼30 MPa and
D
c
¼ 6:3 mm. The Gutenberg–Richter relation-
ship may extend down further but at such
small magnitudes earthquake catalogues are
incomplete. If, instead, D
c
is as small a 100 mm,
then the cut-off magnitude is M
W
¼3:6. Lack of
evidence for accelerating strain before earth-
quakes (Johnston and Linde, 2002; Johnston
230 EARTHQUAKE DYNAMICS
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
231
– [224–238] 13.3.2008 12:00PM
et al., 2006) indicates that the sizes of the nucleat-
ing patches are very small.
15.4 The dynamic regime
Once nucleation is complete and the blocks
either side of a fault start to slide, the system
passes from a quasi-static to a dynamic regime,
and inertial effects in Eq. (15.13) become important.
The rate–state mechanism no longer applies and
we consider a simplified version of the spring–
block model. We neglect viscosity and consider
the spring constant, inertia and friction. When
the tension in the stretching spring reaches the
limiting static frictional force on the block,
F
S
¼ ky
p
, and it starts to move, the frictional
force becomes the dynamic friction F
D
¼ ky
e
and the block starts to accelerate at a rate
ðF
S
F
D
Þ=m ¼ kðy
p
y
e
Þ=m. At arbitrary y,
m
¨
y ¼ kðy y
e
Þ: (15:24)
This is the equation of simple harmonic motion
about y
e
, noting that
¨
y is positive when y < y
e
.
When the block reaches y
e
the net force on it
reverses sign and it completes a half cycle about
y
e
, to reach an extreme position of 2y
e
. At this
point it becomes stationary, static friction takes
over and there is no further motion even if there
is overshoot of the equilibrium position. The
solution to Eq. (15.24) is
y ¼ y
e
ð1 cosð!tÞÞ; (15:25)
where ! ¼
ffiffiffiffiffiffiffiffiffi
k=m
p
. The difference between static
and dynamic stress determines how far and how
fast a block travels. The rise time of the pulse is
the duration of the motion ¼ p=!. The maxi-
mum velocity, V ¼ !y
e
, occurs at y ¼ y
e
, and the
maximum acceleration, a ¼ !
2
y
e
, occurs at y ¼ 0.
We put in some numbers for illustration, trans-
lating the block model parameters to seismic
parameters. Let the limiting static stress be
S
¼ ky
p
=L
2
¼ 30 MPa and the dynamic stress
D
¼ kðy
p
y
e
Þ=L
2
¼ 25 MPa. The final stress is
F
¼ kðy
p
2y
e
Þ=L
2
¼ 20 MPa, giving a stress drop
¼ð
S
F
Þ¼2ð
S
D
Þ¼2ky
e
=L
2
¼ 10 MPa.
For shear modulus ,stiffnessisgivenby
k ¼ L,whereL is the block dimension. From
Eq. (15.25) the equilibrium position is y
e
¼ L
2
=
2k ¼ L=2 ¼ 1:5m; the maximum velocity
is V ¼ =
ffiffiffiffiffiffiffiffi
=
p
¼ "V
S
,where" is maximum
strain and V
S
is the shear wave velocity. These
relations are list ed in Table 15.1, which gives
Table 15.1 Spring–block analogue for a 10 km 10 km earthquake (M 6)
Block dimension L 10 km
Shear modulus 3:3 10
10
Pa
Density 310
3
kg
Shear wave velocity V
s
¼
ffiffiffiffiffiffiffiffi
=
p
3.3 km s
1
Stiffness k ¼ L 3:310
14
Nm
1
Limiting static friction
S
30 Mpa
Dynamic friction
D
25 Mpa
Stress drop ¼ð
S
F
Þ 10 Mpa
Maximum strain " ¼ = 310
4
Equilibrium position y
e
¼ "L=2 1.5 m
Maximum displacement 2y
e
3m
Rise time ¼ p=! 9.5 s
Maximum velocity V ¼ !y
e
¼ "V
s
=2 0.5 m s
1
Maximum acceleration a ¼ !
2
y
e
¼ "V
2
s
=2L 0.16 m s
2
Radiation efficiency (Eq. (15.52))
R
¼
1
40
2.5%
Seismic efficiency (Eq. (15.51))
S
¼
40ð
S
þ
D
=2Þ
0.5%
15.4 THE DYNAMIC REGIME 231
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
232
– [224–238] 13.3.2008 12:00PM
values in the range of those observed for earth-
quakes of this magnitude. This is of course a
simplified model in which the block is moving
over an inertially fixed plane. The simple fric-
tional model predicts that earthquakes should
be periodic and not irregular as is observed.
This is a shortcoming of the assumptions of the
simple frictional model and is the essential rea-
son for considering more complicated frictional
theories such as rate–state.
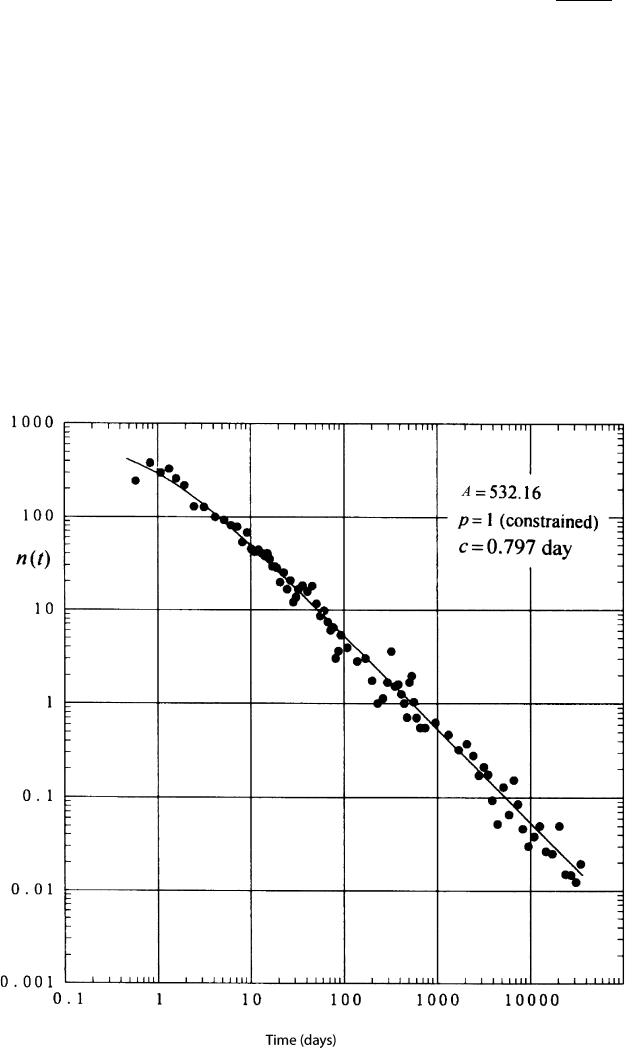
15.5 Omori’s aftershock law
Omori (1894) found that the rate of occurrence of
aftershocks, R(t), as a function of time, t, after a
mainshock decays as inverse time (Fig. 15.3),
RðtÞ¼A=t: (15:26)
This law was generalized by Utsu (1961) to
RðtÞ¼A
1
ðt þ cÞ
p
; (15:27)
with p 1, and c a constant, avoiding the singu-
larity at t ¼0. A law of this type, where t is the
time to the mainshock, has also been used to
represent foreshocks for those events for which
they are clearly identified.
Such power-law clustering has been
described by a number of physical mechanisms
that have in common the observation that fail-
ure is not an instantaneous process, but develops
on a time scale that is non-linearly dependent on
stress. They include fault healing, static friction
increasing with time (the rate–state theory) and
stress corrosion, and it is possible that several
operate simultaneously. The principle can be
FI G U R E 15.3 The decay of aftershock activity after the 1891 Nobi, Japan, magnitude 8 earthquake, fitted to
Eq. (15.27). n(t) is the number of shocks per day, identified as aftershocks, which are seen to have persisted for
80 years. Figure from Utsu (2002).
232 EARTHQUAKE DYNAMICS

//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
233
– [224–238] 13.3.2008 12:00PM
illustrated by examining equations that have
been used to describe the stress corrosion mech-
anism. Material subjected to high stress, espe-
cially at the tips of cracks, is vulnerable to
corrosion by fluids because the atomic bonds
are weakened by the stress. Two alternative
expressions have been used to describe the
time to failure of an aftershock fault in terms
of stress corrosion theory:
t
failure
¼ t
1
n
expðH=RTÞ (15:28)
and
t
failure
¼ t
2
exp½ð þ HÞ=RT; (15:29)
where t
1
and t
2
are constants, is stress, H is
an activation enthalpy and n and are coeffi-
cients that are fitted to observations (Atkinson,
1982; Meredith and Atkinson, 1983). As we saw
in Section 15.3, the rate–state model gives a
stress dependence with the form of Eq. (15.29),
where temperature is assumed constant, and we
examine the application of this equation.
Equation (15.29) can be written
t ¼ t
0
expðlÞ: (15:30)
The number of patches with shear stress
between and þd, SðÞd, is equated to the
number with failure times between t and t þdt,
RðtÞdt
RðtÞdt ¼SðÞd: (15:31)
Substituting from Eq. (15.30) we obtain
RðtÞ¼SðÞ
d
dt
¼
SðÞ
lt
0
expðlÞ; (15:32)
RðtÞ¼
SðÞ
lt
;
5
0
; (15:33)
where
0
is an upper bound, the threshold stress
for plastic failure, caused by slip weakening.
This bound disallows infinite stress, requiring
Sð !1Þ¼0 in Eq. (15.33). Equation (15.33)
gives the 1/t variation of Omori’s law, provided
that SðÞ is a weak function of compared with
the exponential, which makes R(t) a strong func-
tion of t. Imposition of the stress threshold can
account for the round-off in the Omori law at
short times. Shaw (1993) presented a similar
analysis using Eq. (15.28).
15.6 Stress drop and radiated
energy
One of the fundamental problems of earthquake
dynamics is the fraction of the released elastic
energy that goes into seismic waves, and how
much is dissipated in the fault as heat and the
breakage of new surfaces. Consider a fault of
area S across which slip b occurs during an earth-
quake. If the stress across S is initially
1
and
decreases during the earthquake to
2
, then the
total energy release by the earthquake is
E
total
¼
1
2
ð
1
þ
2
ÞSb: (15:34)
We distinguish two components of E
total
,the
energy radiated as elastic waves, E
R
,andthebal-
ance that is dissipated in the fault zone. The break-
age of rocks in the vicinity of the fault and the
production of powdered fault gouge is generally
recognized, and conventional frictional heating,
even to the point of forming a thin layer of melt,
has been inferred from exhumed faults. However,
seismic wave observations cannot distinguish
heating from rock breakage. We represent the
total dissipation in the fault zone as D.Then
E
total
¼ E
R
þ D: (15:35)
The essential difficulty in apportioning the
energy partitioning is that seismic observations
do not give values of
1
or
2
but, as we show
below, give their difference ¼
1
2
, which
is referred to as the stress drop. E
R
is found as
elastic wave energy from seismograms. There is
no direct observation of E
D
, and E
total
can be esti-
mated, where observed displacements can be
fitted to dislocation models, only with assump-
tions about
1
and
2
.
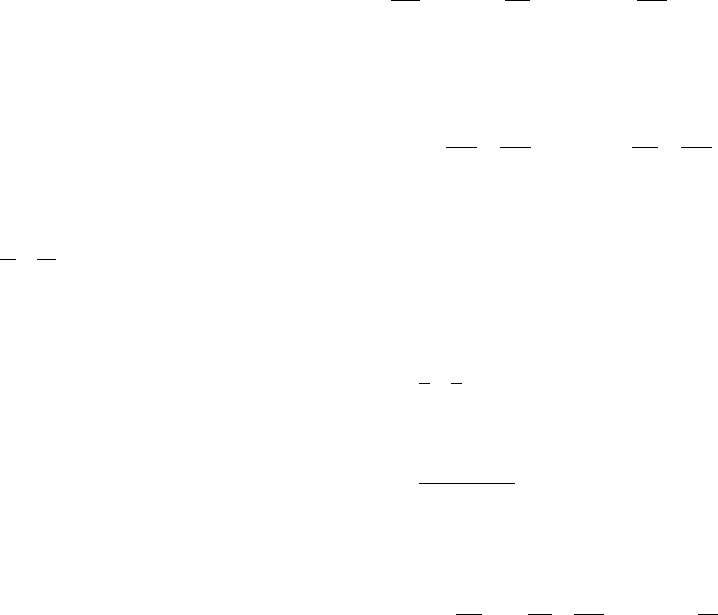
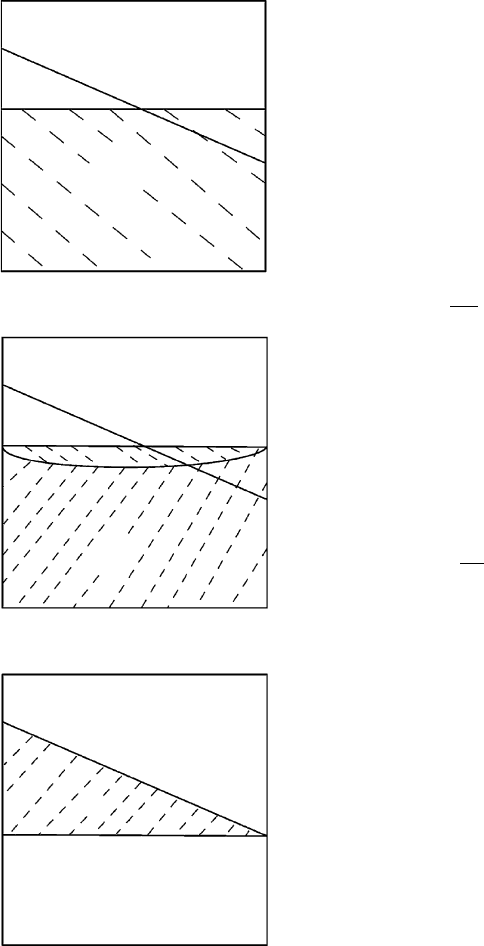
There are two distinct quantities, referred to
as efficiencies, that are ratios of energies, illus-
trated in Fig 15.4. The seismic efficiency,
S
,is
the ratio of radiated to total energy
S
¼
E
R
E
total
: (15:36)
This can be determined if
1
and
2
are estimated
independently of seismic wave observations. We
15.6 STRESS DROP AND RADIATED ENERGY 233
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
234
– [224–238] 13.3.2008 12:00PM
consider this further below to compare E
total
with the tectonic energy budget. We now con-
sider the second efficiency,
R
, termed radiation
efficiency, that can be estimated from seismic
waves without additional information. We iden-
tify with the stress drop a notional energy, E
,
that can be estimated from the moment and
stress drop if a characteristic dimension of an
event is determined from either its spectrum,
geodetically observed displacements, or, for
large events, the distribution of aftershocks.
Then the radiation efficiency is
R
¼
E
R
E
: (15:37)
Values of about 50% are typical, but have a wide
range (Kanamori and Brodsky, 2004).
Recalling that seismic moment (Eq. (14.6)) is
M
0
¼ Sb: (15:38)
the elastic energy, E
, identified with a stress
drop is
E
¼
2
M
0
: (15:39)
M
0
is estimated from the zero-frequency asymp-
tote of the spectrum of seismic waves
(Section 14.5); can be calculated from the
moment if we can estimate a characteristic
fault dimension, l, since for an equi-dimensional
fault
¼ M
0
=l
3
: (15:40)
To obtain l we use the corner frequency, !
0
(Section 14.3), for which there is a direct relation-
ship with the duration of the rupture process, so
that we can write
!
0
¼ V
R
=l; (15:41)
where V
R
is the speed of propagation of rupture,
and the numerical constant 3:5 is somewhat
model-dependent. Observations give
V
R
0:9V
S
; (15:42)
that is, a rupture spreads at about 90% of the
speed of shear waves in the rupturing medium.
Equations (15.41) and (15.42) can be used to find l
from measurements of moment and corner
(a)
(b)
(c)
σ
1
(σ
1
+
σ
2
)/2
σ
2
σ
2
σ
2
Stress
σ
1
σ
1
(σ
1
+
σ
2
)/2
Stress
E
total
Stress
E
R
E
Δσ
D
Displacement
Displacement
Displacement
FI G U R E 15.4 Energy terms used in defining seismic
and radiation efficiencies. Stress during an earthquake
drops from
1
to
2
, taken here as linear with
displacement, but it can have a more complicated
variation. (a) Total energy. (b) Radiated energy, E
R
, and
energy dissipated as frictional heat and rock breakage,
D. (c) Stress drop energy, E
.
234 EARTHQUAKE DYNAMICS
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
235
– [224–238] 13.3.2008 12:00PM
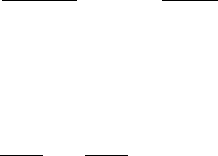
frequency. There are numerous determinations
of stress drop, and for earthquakes of magni-
tudes exceeding 3 or 4 the universal conclusion
is that is centred on the range 1 to 10 MPa
(10 to 100 bar), as in Fig. 15.5(a). Thus, assuming
the stress drop to be approximately a universal
constant (at least for earthquakes with M
W
> 3,
= ¼ " 10
4
), the moment (or magnitude) is
determined by the area of the fault that breaks,
M
0
S
3=2
: (15:43)
The observation that M
0
/ S
3=2
for moderate to
large events (Henry and Das, 2001; Kanamori and
Brodsky, 2004) has provided the strongest evi-
dence that stress drops have a limited range.
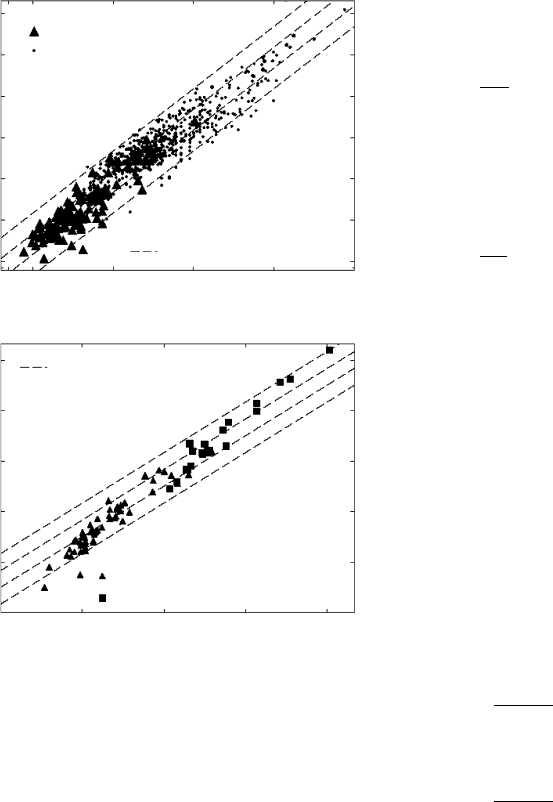
Another term, in common usage, that can be
estimated from observations is apparent stress,
a
, defined as
a
¼
E
R
M
0
; (15:44)
which is generally found to be lower than stress
drop, as can be seen by comparing Figs. 15.5(a)
and (b). Combining Eqs. (15.37), (15.39) and (15.42)
we see that the radiation efficiency is
R
¼
2
a
: (15:45)
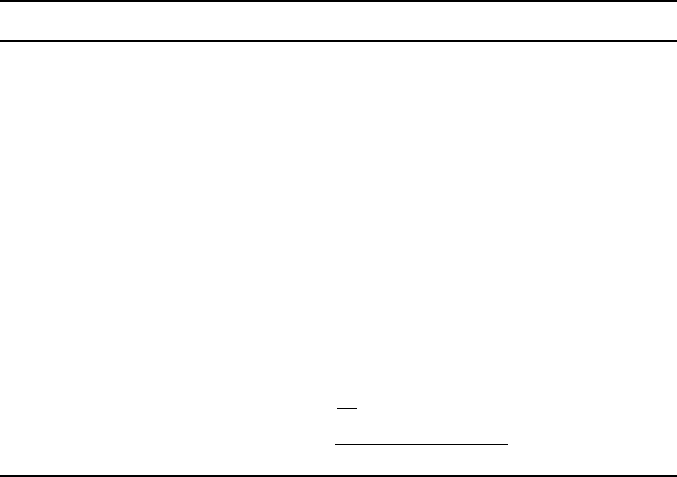
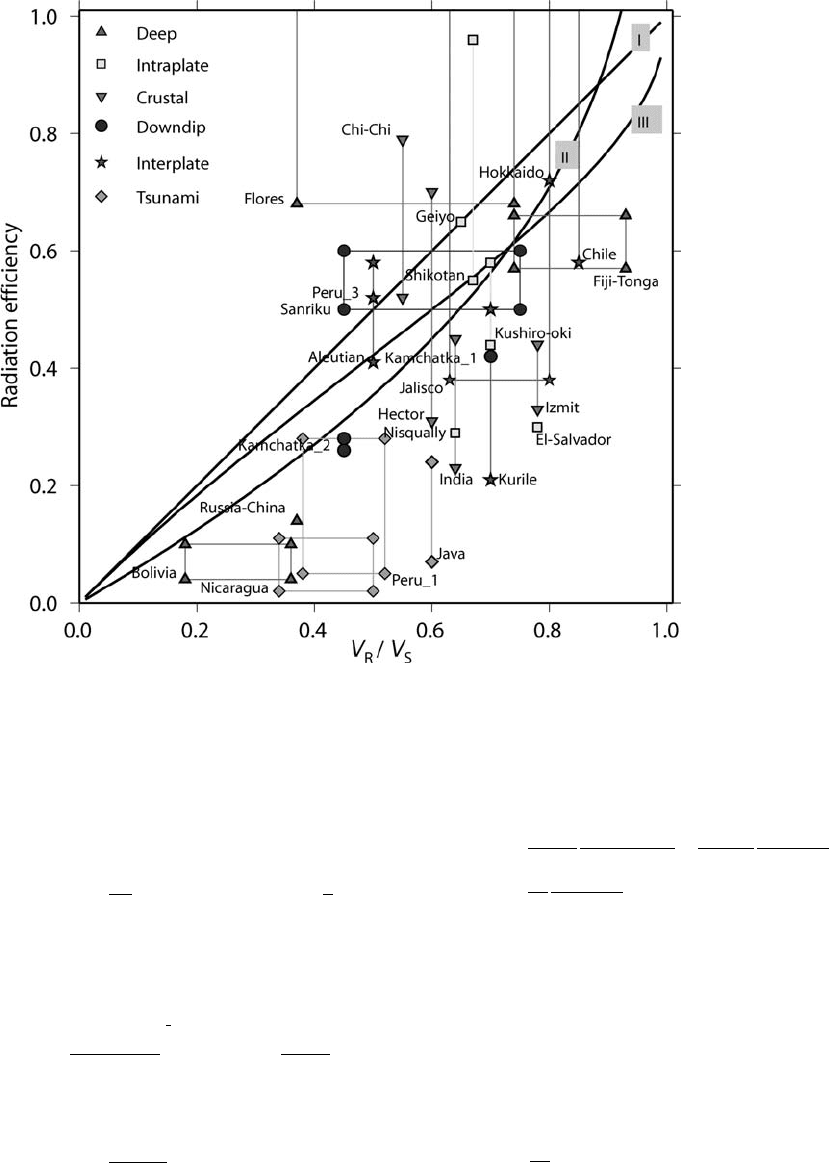
Values of
R
range from a few per cent to 100%
(Fig. 15.6), with the higher values corresponding
to higher rupture velocities. For small earth-
quakes, constant
R
¼ 0:66 appears to be a better
approximation than constant stress drop (Ide
et al., 2003).
Seismic radiation has near-field terms, which
decay rapidly with distance from an exciting
earthquake and include static terms. They are
important to the strong ground motion near to
an earthquake, but for the present discussion we
are more interested in the far-field radiated P or S
energy from a dislocation (Aki and Richards,
2002), which depends on the acceleration of the
moment as
E
P
R
¼
ð
1
0
¨
M
2
0
dt
15pV
5
P
; (15:46)
E
S
R
¼
ð
1
0
¨
M
2
0
dt
10pV
5
S
: (15:47)
Since V
5
S
=V
5
P
1, the radiated energy is dominated
by the S-waves. A very slow earthquake with
¨
M
0
0
generates negligible radiatedenergy(e.g.,Fig.15.6).
Using the block model from Section 15.4, we
can evaluate Eq. (15.47) using the relations in
10
21
10
19
10
17
10
15
10
13
10
11
10
9
10
16
(b)
(a)
10
13
10
10
10
7
10
4
Seismic Energy (J)
Source Dimension (m)
Constant stress drop (MPa)
Constant Apparent Stress (MPa)
Cajon Pass Borehole
Various Combined Studies
100
10
1
0.1
10
1
0.1
0.01
Seismic Moment (Nm)
10
1
10
8
10
11
10
14
Seismic Moment (Nm)
TERRAscope (Kanamori et al. 1993)
Corrected for Q
P
= Q
S
= 1000
10
17
10
20
10
2
10
5
10
3
10
4
10
5
FI G U R E 15.5 (a) Seismic moment versus source
dimension from various studies compiled by
Abercrombie and Rice (2005), including small events
detected by a low-noise seismic station at the base of
a borehole in Southern California (Cajon Pass).
Stress drops calculated from M
0
¼ l
3
(Eq. (15.40)),
plotted as dashed lines, are centred on the range 1–10
MPa. (b) Radiated energy versus moment estimates by
Abercrombie and Rice (2005). Corresponding apparent
stresses calculated from E
R
=M
0
(Eq. (15.44)) are plotted
as dashed lines. Disregarding the smallest shocks, the
data are centred on the range 0.1–1 MPa. Stress drop
is about three times the apparent stress. Thus, by
Eq. (15.45),
R
¼ 2
a
= and radiation efficiency is 0.6.
15.6 STRESS DROP AND RADIATED ENERGY 235
//FS2/CUP/3-PAGINATION/SDE/2-PROOFS/3B2/9780521873628C15.3D
–
236
– [224–238] 13.3.2008 12:00PM
Table 15.1. An earthquake is approximated by
two blocks moving relative to one another
(Fig. 15.2), with total moment given by
M
0
ðtÞ¼
M
0
2
ð1 cos !tÞ; for 0
5
t
5
T
2
; (15:48)
where, taking into account the blocks on either
side of the fault, M
0
¼ 4y
e
L
2
. Using expressions
from Table 15.1, Eq. (15.47) becomes
E
R
¼
!
4
M
2
0
4 10pV
5
S
ð
T
2
0
cos
2
ð!tÞdt ¼
!
3
M
2
0
80V
5
S
: (15:49)
The total change in elastic energy is
E
total
¼
1
þ
2
2
M
0
; (15:50)
so that seismic efficiency,
S
¼ E
R
=E
total
is
S
¼
!
3
M
2
0
80V
5
S
2
M
0
ð
1
þ
2
Þ
¼
!
3
l
3
80V
5
S
2
ð
1
þ
2
Þ
¼
1
40
ð
1
þ
2
Þ
:
(15:51)
For the example chosen in Table 15.1,
S
¼ 0:5%.
Because we cannot normally measure
2
, seismic
efficiencies are uncertain. In cases where mea-
surements have been made, efficiencies less than
6% have been inferred (McGarr, 1999). Radiation
efficiency, Eq. (15.45), is obtained by replacing
ð
1
þ
2
Þ in Eq. 15.51) by (Eq. (15.39)):
R
¼
1
40
: (15:52)
FI G U R E 15.6 Radiation efficiency and rupture velocity. While for small earthquakes radiation efficiency is more or
less constant, 0.6, large earthquakes show the range given here. Symbols I, II, III refer to different crack models
to describe earthquakes. (After Venkataraman and Kanamori, 2004.) Note: c
L
V
S
.
236 EARTHQUAKE DYNAMICS