Современные проблемы машиностроения
Подождите немного. Документ загружается.

V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
11
ВЛИЯНИЕ ЧИСЛА ПРОХОДОВ РЕЛЯТИВИСТСКОГО ЭЛЕКТРОННОГО
ПУЧКА НА СТРУ КТУРНО-ФАЗОВОЕ СОСТОЯНИЕ И МИКРОТВЕР-
ДОСТЬ ПОКРЫТИЙ НА ОСНОВЕ БЫСТРОРЕЖУЩЕЙ СТАЛИ
Саликбаева М.К., Гнюсов С.Ф., Голковский М.Г. 387
КРИТЕРИЙ РЕЖИМОВ ТОЧЕЧНОЙ КОНТАКТНОЙ СВАРКИ СТАЛИ
30ХГСА
Сидоров В.П., Резникова И.В., Отлячкина А.В. 391
ИССЛЕДОВАНИЕ ЭНЕРГЕТИЧЕСКОЙ ЭФФЕКТИВНОСТИ СВАРКИ НА
ОСНОВЕ МОДЕЛИ РАСПРОСТРАНЕНИЯ ТЕПЛА
Сидоров В.П., Хурин С.А., Забияка И.С. 394
ВИХРЕВОЕ ДВИЖЕНИЕ В ПЛАЗМЕННОМ СТОЛБЕ ЭЛЕКТРИЧЕСКОЙ ДУГИ
Степанов А.П., Сотокина Ю.В. 397
О РОЛИ НЕМЕТАЛЛИЧЕСКИХ ВКЛЮЧЕНИЙ В ЭКСПЛУАТЬАЦИОННОЙ
НАДЕЖНОСТИ СВАРНЫХ СОЕДИНЕНИЙ МАГИСТРАЛЬНЫХ ТРУ-
БОПРОВОДОВ
Федосеева Е.М. 401
ВЛИЯНИЕ ТЕПЛОВЛОЖЕНИЯ НА СТРУКТУРУ И СВОЙСТВА ПОКРЫ-
ТИЙ НА ОСНОВЕ СТАЛИ Р6М5
Хайдарова А.А. 406
АВТОМАТИЧЕСКАЯ ОРБИТАЛЬНАЯ СВАРКА НЕПЛАВЯЩИМСЯ ЭЛЕК-
ТРОДОМ С ПРИСАДОЧНОЙ ПРОВОЛОКОЙ ТРУБОПРОВОДОВ М А-
ЛОГО ДИАМЕТРА ДЛЯ КОМПРЕССОРНЫХ СТАНЦИЙ
Шипилов А.В., Будревич
Д.Г., Полосков
С.И. 410
Секция 4
КОНСТРУИРОВАНИЕ, ДИНАМИКА И УПРАВЛЕНИЕ
ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ
РАЗРАБОТКА И ПАРАМЕТРИЧЕСКАЯ ОПТИМИЗАЦИЯ НОВОГО СП О-
СОБА СОЕДИНЕНИЯ ЛИСТОВОГО МАТЕРИАЛА
Аузиньш Я.П., Пакалнс Р.Д. 416
ИССЛЕДОВАНИЕ ПРОФИЛЯ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ КИНЕМАТИЧЕ-
СКОГО ВОЛНОВОГО РЕДУКТОРА С ТОРЦЕВЫМИ ЗУБЬЯМИ
Вершинина Е.А., Крауиньш П.Я. 420
УСТРОЙСТВО ДЛЯ ГАШЕНИЯ ВИБРАЦИИ ПРИ ФРЕЗЕРОВАНИИ
Гаврилин А.Н., Рожков П.С., Ангаткина О.О. 425
ИННОВАЦИОННЫЕ ТЕХНОЛОГИИ КОНСТРУИРОВАНИЯ ТЕХНОЛОГИ-
ЧЕСКОГО ОБОРУДОВАНИЯ
Емельянов Н.В., Зубенко В.Л., Емельянова И.В. 430
ПРОЕКТИРОВАНИЕ И ИЗГОТОВЛЕНИЕ РЕДУКТОРА НА БАЗЕ ПЕРЕДА-
ЧИ ЗАЦЕПЛЕНИЕМ С ПТК И РАЗГРУЖЕННЫМ СЕПАРАТОРОМ
Ильин А.С., Ефременков Е.А., Черемнов А.В. 434
МОДЕЛИРОВАНИЕ ПОИСКА ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ НАВЫКО-
ВОЙ СИСТЕМОЙ ТЕХНИЧЕСКОГО ЗРЕНИЯ
Кавыгин В.В., Московко А.С., Марчук С.В. 438
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
12
ОПРЕДЕЛЕНИЕ ЧИСЛА ТЕЛ КАЧЕНИЯ, ВОСПРИНИМАЮЩИХ НАГРУЗ-
КУ С УЧЕТОМ ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ ЗВЕНЬЕВ ЦИК-
ЛОИДАЛЬНОЙ ПЕРЕДАЧИ
Кобза Е.Е., Ефременков Е.А., Демидов В.Н. 442
ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯ ЕМЫЕ К ДИНАМИКЕ БЕ З-
ОПОРНОГО ДВИЖИТЕЛЯ
Копытов В.И., Крауиньш Д.П., Еремеев
А.В. 447
ПРИВЕДЕННОГО ПЛЕЧА МАЯТНИКА
Копытов В.И. 449
АНАЛИЗ МОДЕЛЕЙ ОДНО МАССОВЫХ ДИНАМИЧЕСКИ Х СИСТЕМ,
ВКЛЮЧАЮЩИХ УПРУГО ВЯЗКИЕ ЭЛЕМЕНТЫ
Крауиньш П.Я. 452
ИССЛЕДОВАНИЕ ПРАКТИКИ РЕАЛИЗАЦИИ ТЕХНОЛОГИЧЕСКИХ ВОЗ-
МОЖНОСТЕЙ СОВРЕМЕННЫХ ТОКАРНЫХ СТАНКОВ В МАШИ-
НОСТРОЕНИИ
Либерман Я.Л. 456
АДАПТИВНОЕ УПРАВЛЕНИЕ ГАШЕНИЕМ КОЛЕБАНИЙ ГРУЗА ПРИ
ЭКСПЛУАТАЦИИ ПОДЪЕМНО-ТРАНСПОРТНЫХ МАШИН
Либерман Я.Л. 461
НАВЫКОВАЯ СИСТЕМА ТЕХНИЧЕСКОГО ЗРЕНИЯ С ГРАДИЕНТНЫМ
РАСПРЕДЕЛЕНИЕМ ВЕСОВЫХ КОЭФФИЦИЕНТОВ
Московко А.С., Московко С.О., Кавыгин В.В. 464
К ВОПРОСУ ДИАГНОСТИКИ СОСТОЯНИЯ РАБОТОСПОСОБНОСТИ АГ-
РЕГАТОВ ТРАНСПОРТНЫХ МАШИН
Остапчук А.К., Маслов Д.А., Рогов Е.Ю. 467
МОДЕЛИРОВАНИЕ ТОЧНОСТИ ОБОРУДОВАНИЯ МАШИНОСТРОИ-
ТЕЛЬНОГО ПРОИЗВОДСТВА ИНТЕРВАЛЬНЫМ МЕТОДОМ
Пестов С.П. 472
ЭТАПЫ ПРОЕКТИРОВАНИЯ МАЛОГАБАРИТНЫХ СТАНКОВ МОДУЛЬ-
НОЙ КОНСТРУКЦИИ С КОМПЬЮТЕРНЫМ УПРАВЛЕНИЕМ
Пестов С.П. 475
АВТОМАТИЗИРОВАННОЕ СРЕДСТВО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕ-
СКИМИ ПАРАМЕТРАМИ ПРИ ФОРМООБРАЗОВАНИИ МНОГО-
ГРАННИКА
Разумов М.С. 478
ИССЛЕДОВАНИЕ ЖЕСТКОСТИ ПРИВОДА ПОДАЧ В СТАНКЕ С ЧПУ
Садовников А.Н., Михайлов К.С. 482
ОЦЕНКА ПРОИЗВОДИТЕЛЬНОСТИ СТАНКОВ С ЧПУ В УСЛОВИЯХ РЕА-
ЛИЗАЦИИ МАЛООПЕРАЦИОННЫХ ТЕХНОЛОГИЙ
Сбродов Н.Б. 484
ДИНАМИКА И УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ
Сергеева И.А., Свечникова Г.И., Горячев А.В. 485
УПРАВЛЕНИЕ И ПОДДЕРЖАНИЕ ЗАДАННЫХ ПАРАМЕТРОВ В ПРОЦЕССЕ
ФУНКЦИОНИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ
Сергеева И.А., Сергеев Д.А. 488
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
13
МНОГОИМПУЛЬСНЫЕ ИСТОЧНИКИ СИГНАЛОВ ДЛЯ ЭХОМЕТРИРО-
ВАНИЯ НЕФТЯНЫХ СКВАЖИН
Сикора Е.А. 492
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СКВАЖИННОГО ОБОРУДОВА-
НИЯ НЕФТЯНОГО СКВАЖИННОГО ШТАНГОВОГО ВИНТОВОГО
НАСОСА С ПОВЕРХНОСТНЫМ ПРИВОДОМ
Сиухин М.В., Птицын Г.В. 497
ИССЛЕДОВАНИЕ ИЗМЕНЕНИЯ РАДИУС А КРИВИЗНЫ ЦИКЛОИДАЛЬ-
НОГО ПРОФИЛЯ В ЗАВИСИМОСТИ ОТ ИСХОДНЫХ ПАРАМЕТРОВ
Худякова С.А. 502
АНАЛИЗ РАБОТЫ УСТ АНОВКИ ОГНЕВОГО ОБЕЗВРЕЖИВАНИЯ ПРО-
МЫШЛЕННЫХ СТОЧНЫХ ВОД ПРОИЗВОДСТВА ПОЛИПРОПИЛЕ-
НА ООО «ТНХК»
Чащина Ю.А. 504
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ НА ЖЕ-
СТКОСТЬ ВНЕШНЕЙ ОБОЙМЫ ЭКСЦЕНТРИКОВЫХ МЕХАНИЗМОВ
СВОБОДНОГО ХОДА НЕФРИКЦИОННОГО ТИПА
Шарков О.В., И.А. Золотов И.А. 510
ИССЛЕДОВАНИЕ ВИХРЕВОГО ДАТЧИКА УРОВНЯ РАСПЛАВА
Шиляев А.И. 513
СИСТЕМА УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ ПРИ
РЕАЛИЗАЦИИ ТЕХНОЛОГИИ ВЕРТИКАЛЬНОГО РАЗДУВА
Широбоков К.П. 517
МЕТОДИКА ОПТИМ ИЗАЦИИ ФОРМЫ Э ЛЕМЕНТОВ МЕХАНИЧЕСКИХ
СИСТЕМ ПРОЕКТИРУЕМЫХ СРЕДСТВАМИ CAD/CAE: ТЕСТЫ
Янушевскис А.В., Мельников А.Г., Пакалнс Р.Д. 519
МЕТОДИКА ОПТИМ ИЗАЦИИ ФОРМЫ Э ЛЕМЕНТОВ МЕХАНИЧЕСКИХ
СИСТЕМ ПРОЕКТИРУЕМЫХ СРЕДСТВАМИ CAD/CAE: ПРОМЫШ-
ЛЕННЫЕ ПРИМЕРЫ
Янушевскис А.В., Мельников А.Г., Бойко А.Ф. 524
Секция 5
ТЕХНОЛОГИИ МЕХАНИЧЕСКОЙ И
ФИЗИКО-ТЕХНИЧЕСКОЙ ОБРАБОТКИ
НАКАТЫВАНИЕ КРУПНЫХ РЕЗЬБ С ВОЗВРАТНОЙ СХЕМОЙ ДЕФОРМИ-
РОВАНИЯ
Афонин А.Н. 531
ИССЛЕДОВАНИЕ БЕЗДЕФЕКТНОСТИ СЛОЕВ ПОЛИМЕРСОДЕРЖАЩЕЙ
СУСПЕНЗИИ, ПОЛУЧЕННЫХ ЛАЗЕРНЫМ СПЕКАНИЕМ
Вальтер А.В. 535
КОМПЬЮТЕРНЫЙ РАСЧЕТ ДИАМЕТРА КРУГЛОЙ ЗАГОТОВКИ ПРИ
ВЫТЯЖКЕ ОСЕСИММЕТРИЧНЫХ ДЕТАЛЕЙ
Васильев К.И., Яблоновская А.В., Охрименко М.А. 540
МНОГОВАРИАНТНАЯ СТРУКТУРА НОВЫХ СПОСОБОВ ФОРМООБРА-
ЗОВАНИЯ ВИНТОВЫХ ЗАГОТОВОК
Васылькив В.В. 544
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
14
ОБЕСПЕЧЕНИЕ КАЧЕСТВА И ЭФФЕКТИВНОСТИ ПРОФИЛЬНОГО ГЛУ-
БИННОГО ШЛИФОВАНИЯ
Воячек И.И., Кошелева Ю.Н. 550
КИНЕМАТИЧЕСКИЙ И СИЛОВОЙ РАСЧЕТ РЕЖИМОВ ФОРМИРОВАНИЯ
СМАЗОЧНЫХ МИКРОКАРМАНОВ ТРИБОЛОГИЧЕСКИХ ПОВЕРХ-
НОСТЕЙ ПРИ КОМБИНИРОВАННОЙ ОБРАБОТКЕ НА МН ОГОЦЕ-
ЛЕВОМ ТОКАРНО-ФРЕЗЕРНОМ ЦЕНТРЕ
Дмитриева О.В., Кузнецов В.П. 553
МЕТОД ПРИНЯТИЯ Р ЕШЕНИЙ, ОБЕСПЕЧИВАЮЩИХ ТЕХНИЧЕСКИЕ
ТРЕБОВАНИЯ К ПРОДУКЦИИ НА СТАДИИ ОПЕРАТИВНО-
КАЛЕНДАРНОГО ПЛАНИРОВАНИЯ
Долгов В.А. 558
АВТОМАТИЗИРОВАННАЯ ОПТИМИЗАЦИЯ ПРОЦЕССОВ РЕЗАНИЯ МА-
ТЕРИАЛОВ СОВРЕМЕННЫМИ ИНСТРУМЕНТАМИ С ИЗНОСО-
СТОЙКИМИ ПОКРЫТИЯМИ
Козлов В.А., Маношкин В.В. 563
АНАЛИТИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНОЙ ПО РАЗМЕРНОЙ
СТОЙКОСТИ ИНСТРУМЕНТА ТЕМПЕРАТУРЫ РЕЗАНИЯ ПРИ ЛЕЗ-
ВИЙНОЙ ОБРАБОТКЕ МАТЕРИАЛОВ
Козлов В.А., Маношкин В.В. 566
ТЕПЛОВОЙ РАСЧЕТ СИСТЕМЫ ОХЛАЖДЕНИЯ СТАНКА ДЛЯ ОБРАБОТ-
КИ ГЛУБОКИХ ОТВЕРСТИЙ
Котова Е.В. 568
ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ ФОРМИРОВАНИЯ ПОВЕРХ-
НОСТНОГО СЛОЯ ДЕТАЛЕЙ ПРИ ФИНИШНОЙ ОБРАБОТКЕ ВЫ-
ГЛАЖИВАНИЕМ НА ТОКАРНО-ФРЕЗЕРНЫХ ЦЕНТРАХ
Кузнецов В.П., Макаров А.В., Киряков А.Е. 571
ОСОБЕННОСТИ ПЕРЕМЕЩЕНИЯ РАБОЧЕЙ СРЕДЫ ПРИ АБРАЗИВНО-
ЭКСТРУЗИОННОЙ ОБРАБОТКЕ ДЕТАЛЕЙ
Левко В.А., Турилов Д.М., Ларкина И.А. 576
ВЛИЯНИЕ ДЛИНЫ КАНАЛА НА РАСПРЕДЕЛЕНИЕ ДАВЛЕНИЯ РАБОЧЕЙ
СРЕДЫ ПРИ АБРАЗИВНО-ЭКСТРУЗИОННОЙ ОБРАБОТКЕ
Левко В.А., Харин О.Д. 580
ЗАВИСИМОСТЬ СТОЙКОСТИ ИНСТРУМЕНТОВ ИЗ КОМПОЗИТОВ ОТ
ИЗМЕНЕНИЯ РЕЖИМОВ РЕЗАНИЯ
Лунин Д.Ю., Алтухов А.Ю., Кудряшов Е.А. 584
РАЗРАБОТКА МЕТОДИКИ И ТЕХПРОЦЕССА, ОБЕСПЕЧИВАЮЩИХ
СНИЖЕНИЕ ВЕРОЯТНОСТИ ПОЯВЛЕНИЯ ГЛУБОКИХ РИСОК ПРИ
ПРЕЦИЗИОННОМ ПОЛИРОВАНИИ ЛОПАТОК ГТД
Макаров В.Ф., Кочепанова Е.Н. 586
РЕШЕНИЕ ТЕПЛОФИЗИЧЕСКОЙ ЗАДАЧИ, ВОЗНИКАЮЩЕЙ ПРИ СВЕР-
ЛЕНИИ ГЛУБОКОГО ОТВЕРСТИЯ
Милованова Л.Р., Будейкина И.Е., Епифанов М.А. 590
ЭЛЕКТРОДИФФУЗИОННАЯ ТЕРМИЧЕСКАЯ ОБРАБОТКА НИЗК ОЛЕГИ-
РОВАННЫХ СТАЛЕЙ
Паульс В.Ю., Жданович М.Ф., Смолин Н.И. 595
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
15
ПРИНЦИПЫ ОПТИМАЛЬНОГО ПРОЕКТИРОВАНИЯ МАШИН И МЕХА-
НИЗМОВ
Петрушин С.И., Губайдуллина Р.Х. 597
РАСЧЕТ СОСТАВЛЯЮЩИХ СИЛЫ РЕЗАНИЯ ПРИ НЕСВОБОДНОМ ТОЧЕ-
НИИ НА ОСНОВЕ ТЕОРИИ ПЛАСТИЧНОСТИ
Проскоков А.В. 605
АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС УПРАВЛЕНИЯ И МОНИТО-
РИНГА ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ ОБРАБОТКИ Д ЕТА-
ЛЕЙ НА СТАНКАХ С ЧПУ
Проскуряков П.Ю., Петровский Е.Н., Боголюбова М.Н. 610
АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ КОНТРОЛЯ ШЕР ОХО-
ВАТОСТИ ПОВЕРХНОСТИ В ЦЕХОВЫХ УСЛОВИЯХ НА МАШИНО-
СТРОИТЕЛЬНОМ ПРОИЗВОДСТВЕ
Радыгин В.Ю., Богомолов Д.Ю. 614
ПРИМЕНЕНИЕ ОЦЕНОК НАДЕЖНОСТИ РЕЖУЩЕГО ИНСТРУМЕНТА
Симсиве Ж.В. 617
О ВЛИЯНИИ СТЕПЕ НИ ТОЛСТОСТЕННОСТИ ЗАГОТОВОК НА КОН-
ТАКТНЫЕ ДАВЛЕНИЯ ПРИ ДОРНОВАНИИ ОТВЕРСТИЙ МАЛОГО
ДИАМЕТРА С БОЛЬШИМИ НАТЯГАМИ
Скворцов В.Ф., Охотин И.С., Иванов М.А. 620
О РАДИУСЕ ПЛАСТИЧЕСКОЙ ОБЛАСТИ ПРИ ДОРНОВАНИИ ОТВЕР-
СТИЙ В ТОЛСТОСТЕННЫХ ЦИЛИНДРАХ
Скворцов В.Ф., Охотин И.С. 623
ВЛИЯНИЕ КОЛЕБАНИЙ СИЛЫ РЕЗАНИЯ НА КОНТАКТНУЮ ТЕМПЕРА-
ТУРУ ПРИ ШЛИФОВАНИИ
Смирнов В.А. 625
НЕОБХОДИМОСТЬ ИССЛЕДОВАНИЯ ПРОЦЕССА РАЗРУШЕНИЯ МАТЕ-
РИАЛОВ ПРИ ШЛИФОВАНИИ
Старшев Д.В. 631
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПАРАМЕТРОВ РЕЖИМА РЕЗАНИЯ НА ВЫ-
ХОДНЫЕ ХАРАКТЕРИСТИКИ ПРОЦЕССА ТОЧЕНИЯ ЧУГУНА ―НИРЕ-
ЗИСТ‖
Тарасов С.В., Свирщѐв В.И. 635
ТЕОРЕТИЧЕСКИЙ РАСЧЁТ ГРАФИКА ИЗМЕНЕНИЯ ГЛАВНОЙ СОСТАВ-
ЛЯЮЩЕЙ СИЛЫ РЕЗАНИЯ ПРИ ЗУБОФРЕЗЕРОВАНИИ
Тахман С.И., Рохин Л.В., Тюкалов О.А. 638
ОБЕСПЕЧЕНИЕ СКВОЗНОГО РАЗРУШЕНИЯ МНОГОСЛОЙНОГО МАТЕ-
РИАЛА ПОД ДЕЙСТВИЕ СВЕРХЗВУКОВОЙ ГИДРОАБРАЗИВНОЙ
СТРУИ
Харчиков Е.В., Михеев А.В., Барсуков Г.В. 643
ФОРМИРОВАНИЕ СИСТЕМЫ ПОКАЗАТЕЛЕЙ КАЧЕСТВА МЕТАЛЛОРЕ-
ЖУЩИХ СТАНКОВ
Ходыревская С.В. 648
О НЕОБХОДИМОСТИ УЧЕТА ПОКАЗАТЕЛЕЙ НАДЕЖНОСТИ ПРИ РАСЧЕТЕ
ПОКАЗАТЕЛЕЙ ЭКОНОМИЧЕСКОЙ ЭФФЕКТИВНОСТИ ПРОЕКТИ-
РУЕМЫХ ТЕХНОЛОГИЧЕСКИХ ОПЕРАЦИЙ МЕТАЛЛООБРАБОТКИ
Шашок А.В., Колесников Д.А. 651
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
16
УЧЕТ ДИНАМИЧЕСКИХ НАГРУЗОК ПРИ РАСЧЕТЕ ШАТУНА КРИВОШИПНО-
ПОЛЗУННОГО МЕХАНИЗМА МАЛОГАБАРИТНЫХ ПОРШНЕВЫХ МАШИН,
ВЫПОЛНЕННОГО В ВИДЕ ПРУЖИНЫ С МЕЖВИТКОВЫМ ДАВЛЕНИЕМ
И.П. Аистов, д.т.н., проф., В.Д. Смирнов, к.т.н., доц.,
Омский государственный технический университет,
644050, пр. Мира, 11, тел. (3812)-65-3389
E-mail: aistov_i@mail.ru
В док ладе приведен учет динамических нагрузок при расчете шатуна кривошипно-
ползунного механизма малогабаритных поршневых машин, выполненного в виде пружины с
межвитковым давлением (ПМВД). При составлении математической модели и расчетной
схемы шатуна, выполненн ого в виде пружины с межвитковым давлением приняты следую-
щие допущения: ПМВД з аменялась эквивалентным стержнем (ЭС) с при веденными характе-
ристиками жесткости ЭС на сдвиг А
1
, изгиб А
2
и растяжение А
3
; распорными усилиями, воз-
никающими вследствие упругой линии пружины при размыкании из-з а еѐ изгиба, а также
взаимодействием витков друг с другом для ПМВД в сомкнут ом состоянии пренебрегаем;
ввиду особенности конструкции кривошипно-ползунного механизма (КПМ) малогабаритных
поршневых машин, прогибы ЭС принимались малыми. Тогда дифференциальное уравнение
прогибов оси v(z) ЭС можно записать в следующем виде:
2
0
( ) ( ) ( )
IV
v z k v z q z
, (1)
где
2
21
( ) ( )
1,
N z N z
k
AA
0
0
( ) , растяжение (виткиПМВД -разомкнуты)
()
( ) , сжатие(виткиПМВД-сомкнуты)
PP
Nz
PP
,
q
o
(z) – поперечные распределения нагрузки, учитывающие «массовые» силы, например силы
тяжести или силы инерции витков ПМВД, действующие на шатун.
Общее решение дифференциального уравнения (1) может быть предоставлено с помо-
щью нормальной системы фундаментальных функций
( )( 1,4)
i
V z i
в следующем виде [1]:
1 1 2 2 3 3 3 3
( ) ( ) ( ) ( ) ( ),v z C V z C V z C V z C V z
(2)
где постоянные интегрирования
( 1,4)
i
Ci
могут быть получены из условия закрепления
шатуна КПМ:
(0) 0;
( ) ( ) (1 cos ( ));
(0) 0;
( ) ( ) ( ) 0.
v
v l l f r l
M l Q l f N l R
(3)
В уравнениях (1) – (3) введены следующие обозначения: х, у, z – система координат, в
пространстве кото рых записываются уравнения равновесия шатуна (начало отсчета от з адел-
ки витка ПМВД в поршне); v
(l) и θ
(l) – прогиб и угол поворота сечения ЭС с координатой
z = l
; Q(z) и N(z) – поперечная и продольн ая силы, действующие в сечении ЭС; l – длина ЭС
(или «гибкой» части шатуна); f – длина «жесткой» части шатуна, в котор ую включается не-
раскрытые при изгибы ПМВД витки; f
0
– радиус обой мы шатуна; r – радиус кривошипа
КПМ;
sin( )rt
– текущее отклонение кривошипа от оси поршня (Ω – угловая скорость
вращения кривошипа, t – текущее время); P(∆) – сила, действующая на поршень КПМ.
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
17
Решения уравнения (1) представлены в виде:
3 3 4 4
( ) ( ),v z Ñ V z Ñ V z
где значения
постоянных интегрирования
34
,CC
и вид фундаментальных функций
34
( ), ( )V z V z
получены
для каждого из случаев нагружения шат уна КПМ: N(z)
>
0 – растяжение шатуна с изгибом,
N(z)
<
0 – сжатие шатуна с изгибом, N(z) =
0 – «чистый» поперечный изгиб шатуна.
Для учета динамических напряжений, возникающих в шатуне КПМ от угловых коле-
баний нижней обоймы, вместо условий закрепления шатуна (3) в статике рассматривались
следующие условия закрепления шатуна, выполненного в виде ПМВД:
22
д
(0, ) 0;
0, 0;
, , sin( );
, , , , , sin( ),
m f m f m
vt
t
v l t l t f r t
M l t Q l t f N l t R J m f l t B l t m f r t
(4)
где J
m
– момент инерции головки шатуна относительно оси вращения кривошипа; m
f
, f
m
– масса
нераскрытых витков пружины, отнесенных к «жесткой» части шатуна и расстояние от цен-
тра тяжести нераскрытых витков до оси вращения к ривошипа, соответственно; B
д
– коэффи-
циент демпфирования, характеризующий диссипативные силы сопротивления.
При вращении кривошипа радиусом r с постоянной угловой скоростью Ω, поршень
КПМ совершает возвратно-поступательное движение посредством шатуна, выполненного в
виде ПМВД, и который совершает сложны е изгибные движения в плоскости нижней обоймы
шатуна. Cчитаем, что периодическое усилие на поршень P(∆) с периодом
2
T
– задано.
Принимаем, что прогибы упругой линии шатуна
,v z t
удовлетворяют решению
дифференциального уравнения равновесия шатуна в статике (1), записанного с использова-
нием нормальной системы фундаментных функций (2), то есть рассматривается дорезонанс-
ный режим кинематического возбуждения шатуна от кривошипа с угловой скоростью
по
отношению к собственным частотам самого шатуна. Тогда, учитывая соотношения балки
Тимошенко и пренебрегая ма ссой витков ПМВД, включенную в «жесткую » часть шатуна
f
m
, перепишем граничные условия (4) в виде:
3 3 4 4
д
1
0, 0;
0, 0;
, , , ;
, , , , ,
1
Rm
vt
t
C V l t C V l t l t f
f
v l t v l t M J l t B l t
k
(5)
В формулах (5) введены следующие обозначения:
1
2
( , )
(1 ) ;
R
N l t
M k R
A
1
1
( , )
;
N l t
k
A
1
2
1.
m
m
J
Jk
A
Учитывая соотношение:
3 3 4 4 1
( , ) , , 1 ,C V l t C V l t l t k
(6)
Решаем его совместно с третьим уравнением краевого условия (5), относительно по-
стоянных С
3
и С
4
через
и
,:lt
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
18
1
34
1
43
,1
,
,1
,
l t k
C d V l t
tt
l t k
C в V l t
tt
, 7)
где
3 3 1
, , ;в V l t V l t f
4 4 1
, , ;d V l t V l t f
3 4 3 4
, , , , ;t V l t V l t V l t V l t
1
1
(1 )
f
f
k
.
Подставляя полученное решение (7) в четвертое граничное условие (5), получаем
уравнение угловых колебаний нижней обоймы шатуна – ПМВД в виде:
22
ä1
2
,,
, , , 1 ,
mm
t N l t l t
AA
l t B l t l t k R
J t J A t
(8)
где:
34
4 4 1
3 3 1
;
, , , ;
, , ;
, , .
t в g d l
l t g V l t l V l t
g V l t V l t f
l V l t V l t f
Уравнение (8) содержит периодический коэффициент при члене
,lt
2
2
0
m
t
A
t
Jt
(9)
Подобное уравнение было численно проанализировано в [2] и предложено прибли-
женное решение, заключающееся в том, что пренебрегая коэффициентами демпфирования В
д
и высшими гармоническими составляющими разложения угловых колебаний обоймы шату-
на в ряды Фурье, считаем
2
,,l t l t
.
Тогда, с учетом обозначений (9), можно записать:
2
2
0
,
,1
R
t l t
l t M
t t t
. (10)
Правая часть уравнения (10) представляет собой статический угол поворота нижней
обоймы:
*
cm R
l
lM
.
Таким образом, решение уравнения (10) можно представить приближенно в виде
2
2
0
, /(1 )
cm
l t l
t
. (11)
Тогда по заданному отклонению
и найденному повороту нижней обоймы
cm
l
по
формулам (7) находим постоянные интегрирования С
3
и С
4.
Затем определяем изгибающий
момент, действующий в сечениях ЭС
3 3 4 4
2
1
,,
,
1
C V z t C V z t
M z t A
k
,
Принимая, что изгибающий момент М(z,t), действующий в сечениях ЭС, равен
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
19
( , ) sin 2 , 1 cos 2 , витки ПМВД сомкнуты
( ) ,
, sin 2 , cos , , витки ПМВД разомкнуты
j
M z t j N z t j
Mt
M z t j N z t R z t
где М
ρj
– крутящий момент, действующий в j-ом витке пружины, оценить напряженное со-
стояние в ви тках ПМВД с учетом угловых колебаний нижней обоймы можно по следующей
формуле:
дин р
( ) ; 1,2,...,
jo
j
MM
t k j i
W
,
где
00
0,5M P R
– величина момента сил предварительного поджатия витков ПМВД (P
0
– сила
предварительного поджатия витков ПМВД),
k
– коэффициент, учитывающий кривизну витков
ПМВД;
W
– полярный момент сопротивления сечения витка ПМВД; i
p
– число рабочих витков
ПМВД.
Литература
1. Вибрации в технике: Справочник. В 6-ти т. / Ред. совет: В.Н. Челомей (пред.). – М.:
Машиностроение, 1978. – Т.1. Колебания линейных систем / Под ред. В.В. Болотина. – 1978.
– 352 с.
2. Бородин А.В. Учет динамических нагрузок в кривошипно-шатунном механизме с
гибким шатуном / А.В. Бородин и др. // Химическое и н ефтяное машин остроение. – 1989. –
№ 10. – С. 18-20.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДЛЯ РАСЧЕТА ШАТУНА КРИВОШИПНО-
ПОЛЗУННОГО МЕХАНИЗМА МАЛОГАБАРИТНЫХ ПОРШНЕВЫХ МАШИН,
ВЫПОЛНЕННОГО В ВИДЕ ПРУЖИНЫ С МЕЖВИТКОВЫМ ДАВЛЕНИЕМ
И.П. Аистов, д.т.н., проф., В.Д. Смирнов, к.т.н., доц.
Омский государственный технический университет,
644050, пр. Мира, 11, тел. (3812)-65-3389
E-mail: aistov_i@mail.ru
Одним из путей мини атюризации малогабаритных поршневых машин (например, га-
зовых криогенных машин [1]) является использование в передаточном механизме привода
поршней гибких шатунов. Такой шатун может быть выполнен, например, в виде жестко за-
крепленного в поршне и на обойме шатуна тонкого стержня (плоской пружины) [2], или в
виде пружины с межвитковым давлением (ПМВД) [3].
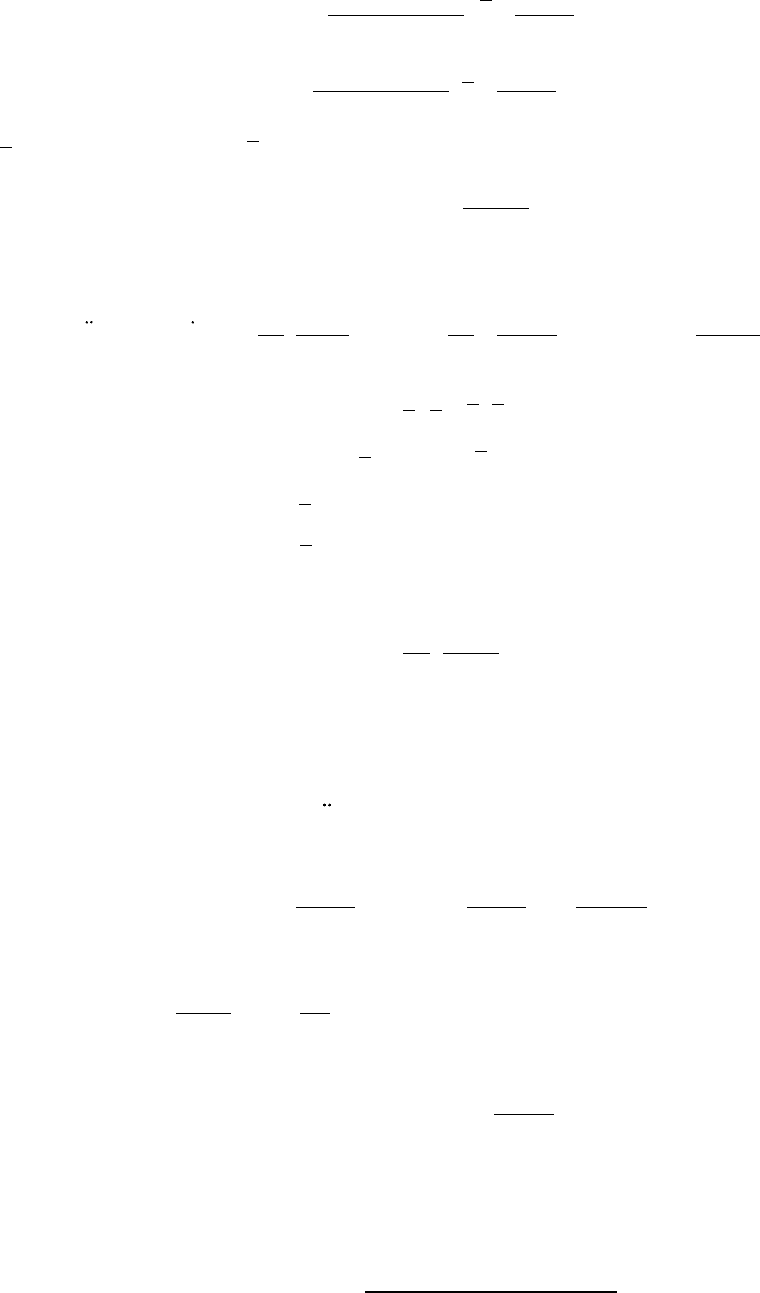
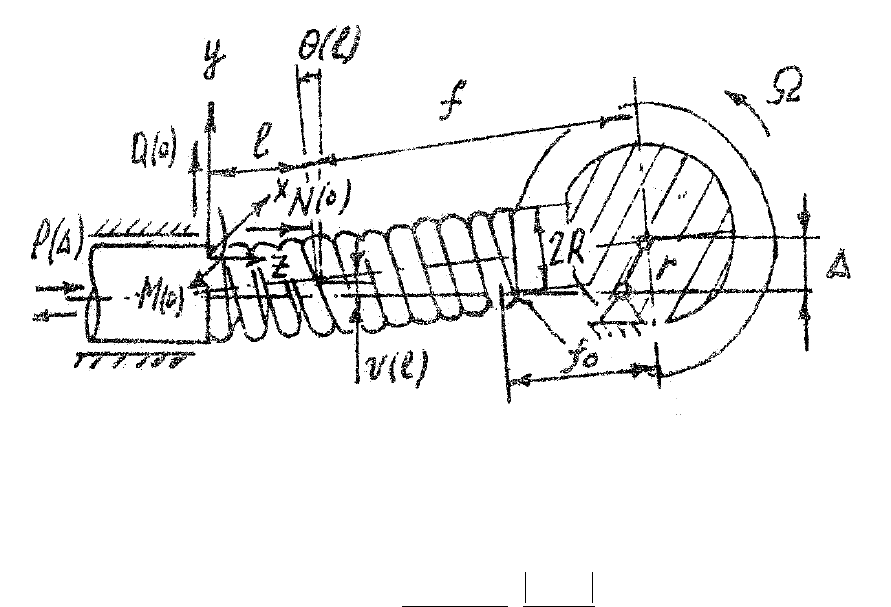
При составлении математической модели и расчетной схемы шатуна, выполненного в
виде пружины с межвитковым давлением (рис.1) приняты следующие допущения: ПМВД
заменялась эквивалентным стержнем (ЭС) с приведенными характеристиками жесткости
стержня на сдвиг А
1,
изгиб А
2
и растяжение А
3
:
0
1
3
p
8
b
ÍÂ
À
Di
;
0
3
3
p
4 B
H
A
Di
;
0
p
2
2
1
, витки ПМВД разомкнуты
1/ 1/
3/
, витки ПМВД-сомкнуты
1/
n
n
n
Н
D i B B
A
B B B
h
B B D
;
V Международная научно-техническая конференция
«Современные проблемы машиностроения»
______________________________________________________________
20
где
0 p
H l i h
– начальная дли на ПМВД; i
p
– число рабочих витков ПМВД; h – высота
(диаметр) сечения витка ПМВД;
2DR
– средний диаметр навивки ПМВД (R – средний
радиус ПМВД); B
ρ
– крутильная жесткость сечения витка ПМВД; B
n
и B
b
– изгибные жестко-
сти сечения витка ПМВД отн осительн о ее нормали и бинормали; изгибающий момент М(z),
действующий в сечениях ЭС, равен крутящему моменту М
ρ j
, действующему в j-ом витке,
т.е. М(z) = М
ρj
.
Распорными («цепными») усилиями, возникающими в пружине вследствие изменения
длины упругой линии ЭС при размыкании витков с изгибом:
2
цепн 3
0
( ( )) / 2
l
P А v z dz l
(здесь
v(z) – прогиб оси ЭС, l – длина ЭС), пренебрегаем [4].
Виду особенности конструкции кривошипно-ползунного механизма (КПМ), прогибы
v(z) ЭС принимаются малыми.
На рис.1 введены следующие обозначения: х, у, z – система координат, в пространстве
которых записываются уравнения равновесия шатуна (начало отсчета от заделки витка ПМВД
в поршне); v
(l) и θ
(l) – прогиб и угол поворота сечения ЭС о координатой z = l
; Q(z) и N(z) –
поперечная и продольная силы, действующие в сечении ЭС; l – длина ЭС (или «гибкой» части
шатуна); f – длина «жесткой» части шатуна, в которую включается нераскрытые при изгибы
ПМВД витки; f
0
– радиус обоймы шатуна; r – радиус кривошипа КПМ;
sin( )rt
– теку-
щее отклонение кривошипа от оси поршня (Ω – угловая скорость вращения кривошипа); P(∆) –
сила, действующая на поршень КПМ. Принимается, что при N(z)
>
0 – происходит растяжение
шатуна, при N(z)
<
0 – сжатие шатуна.
Cформулируем условие размыкания витков шатуна, выполненного в виде ПМВД:
N(z)
P
0
+ P
*
; (1)
*
1/
()
,
3 / 0,5
n
n
BB
Mz
P
B B D
(2)
где P
0
– величина предварительного поджатия витков ПМВД; P
*
– сила взаимодействия вит-
ков вследствие изгиба ПМВД [ 5]; и условие раскрытия витков ПМВД без их размыкания от-
носительно друг друга
M
(z)
M
0 ,
(3)
Рис. 1. Расчетная схема шатуна, выполненного в виде
ПМВД