Смольников А.П. Теория автоматического управления
Подождите немного. Документ загружается.

183
-90
2) Пусть k = 10; T
1
= 1c ; T = 0.01с.
99.0
1
01.0
1
0
===
−
−
eea
T
T
.
()
()
()
()
с
a
aT
T
э
1
99.012
99.0101.0
12
1
0
0
=
−
+
=
−
+
=
.
1
200
01.0
22
;1
1
;10
−
==== c
T
T
э
k
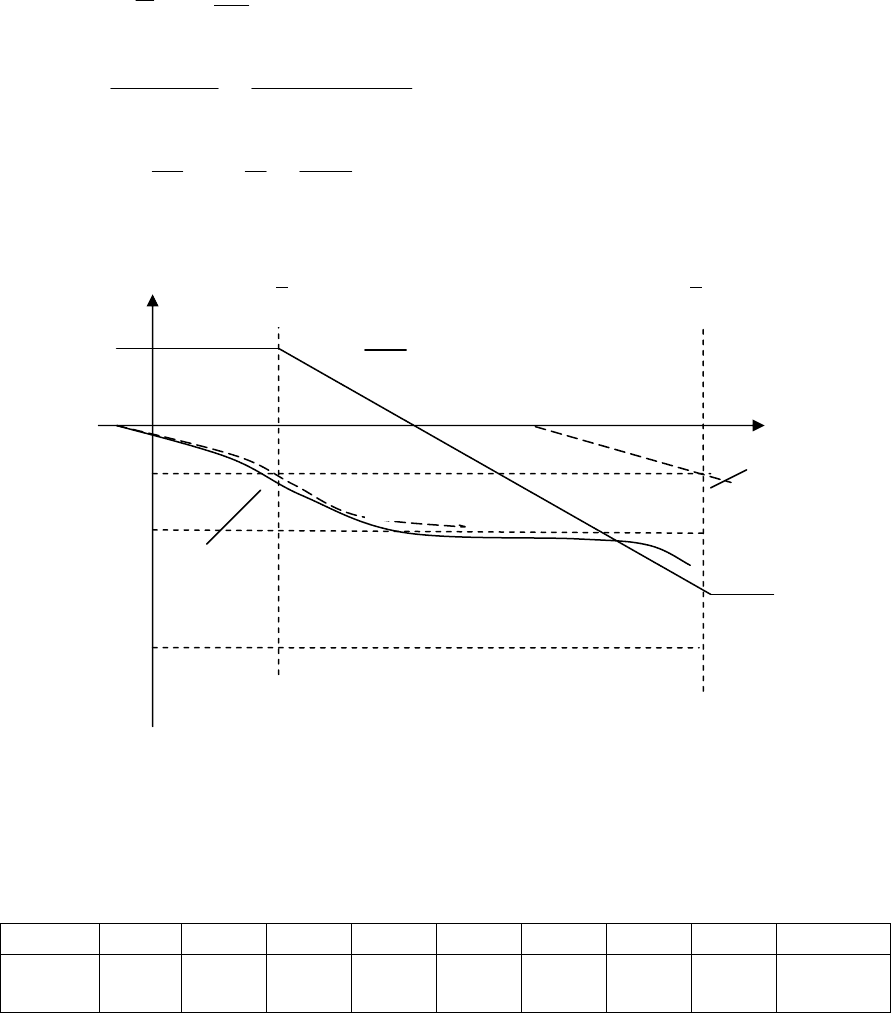
ЛЧХ изображены на рис. 22.3.
L(
ω
*)
0
-
Соответствие между
ω
и
ω
*
ω
*
1 2 3 4 8 16 160 500
ω
*
→
∝
ω
0,98 1,85 2,57 3,14 4,43 5,3 6,18 6,25
ω →
6,28
φ˚ L, дБ
1
1
(
*)
ϕ
2
-
180
.дек
дБ
20
-
90
0
-
ϕ
1
1
Т
Э
2
Т
1*
,
−
с
ω
100
Рис. 22.3
184
22.3. Синтез ИСАУ методом ЛЧХ
Синтез осуществляется в следующей последовательности.
1. Строится ЛЧХ нескорректированной САУ L
н
(
ω
*
)
в функции
псевдочастоты
ω
*
.
2. Строится желаемая ЛАХ. В низкочастотной части она строится так
же, как и ЛАХ для непрерывных САУ. Отличия существуют в области
средних и высоких частот, где должно выполняться следующее условие. Так
как W
н
(j
ω
*
) часто содержит нули в правой полуплоскости, то необходимо,
чтобы и желаемая ЛАХ их включала для выполнения условия «грубости»
САУ.
3. Путем графического вычитания определяется передаточная функция
последовательного корректирующего звена
()
(
) ()
***
lg20lg20lg20
ωωω
jWjWjW
HCK
−= или
()
(
)
()
*
*
*
ω
ω
ω
jW
jW
jW
H
C
K
= .
4. Определяется передаточная функция корректирующего звена W
K
(z) с
помощью подстановки
1
12
*
+
−
⋅=
z
z
T
j
ω
.
5. По полученной передаточной функции W
K
(z) определяют
корректирующие звенья, включаемые в цепь, или разностное уравнение,
которое реализуется на ЭВМ.
РАЗДЕЛ 4. ЦИФРОВЫЕ САУ С МИКРО-ЭВМ
23. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЦИФРОВЫХ САУ
23.1. Функциональная схема цифровой САУ
Микропроцессоры, используемые в САУ, решают следующие
основные задачи:
1. Логическое управление, то есть реализация логических функций.
При этом микроЭВМ оперирует с дискретными входными и выходными
сигналами. На практике, это замена различных релейно-контактных схем
управления установками на управление от микроЭВМ.
2. Управление непрерывными объектами по требуемому закону. При
этом с выхода объекта
измеряются и на его вход поступают непрерывные, то
есть аналоговые сигналы.
3. Комбинированный вариант.
На вход объекта поступает дискретный сигнал, а с выхода непрерывный
сигнал. При этом микроЭВМ реализует нелинейные законы управления,
например, соответствующие трехпозиционному реле.
185
Будем рассматривать вторую задачу.
Рассмотренные методы математического описания, анализа и синтеза
импульсных дискретных систем применимы и для систем управления с
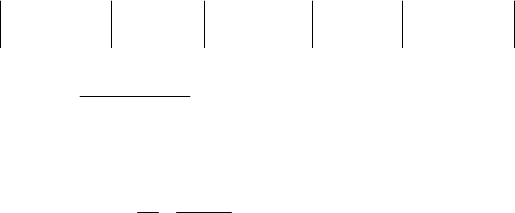
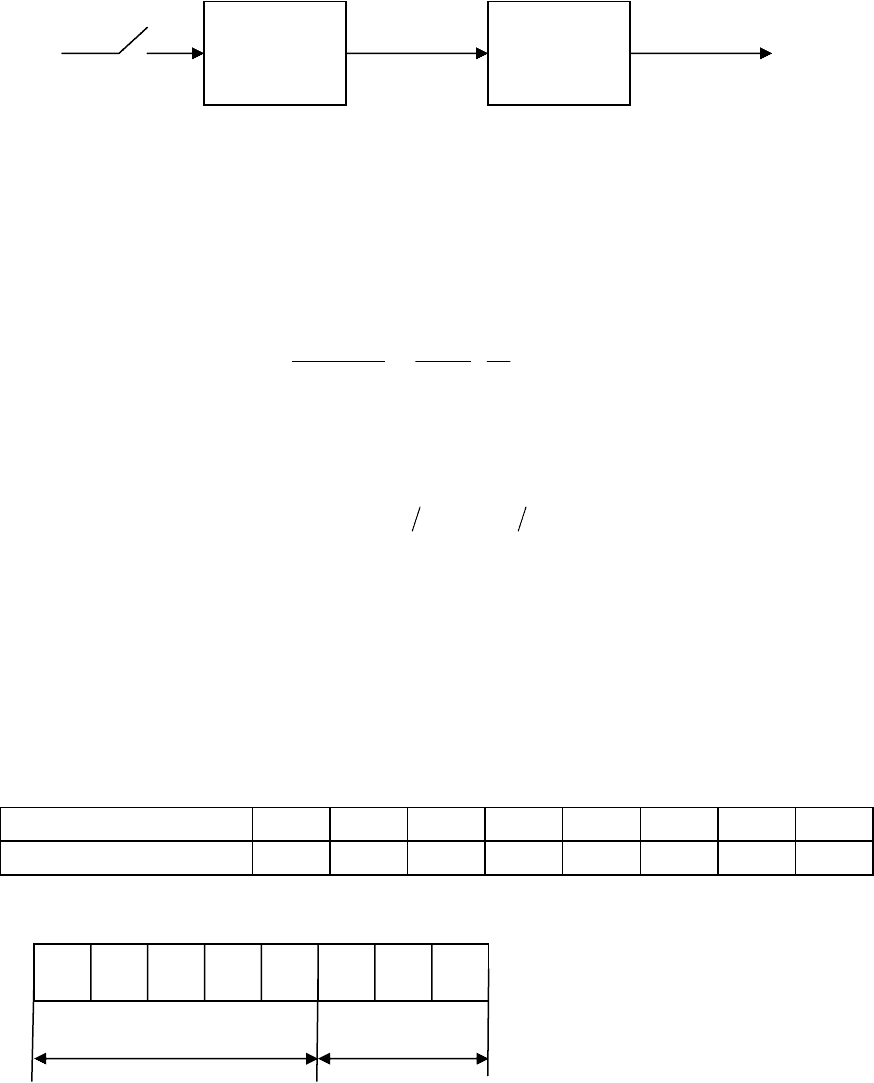
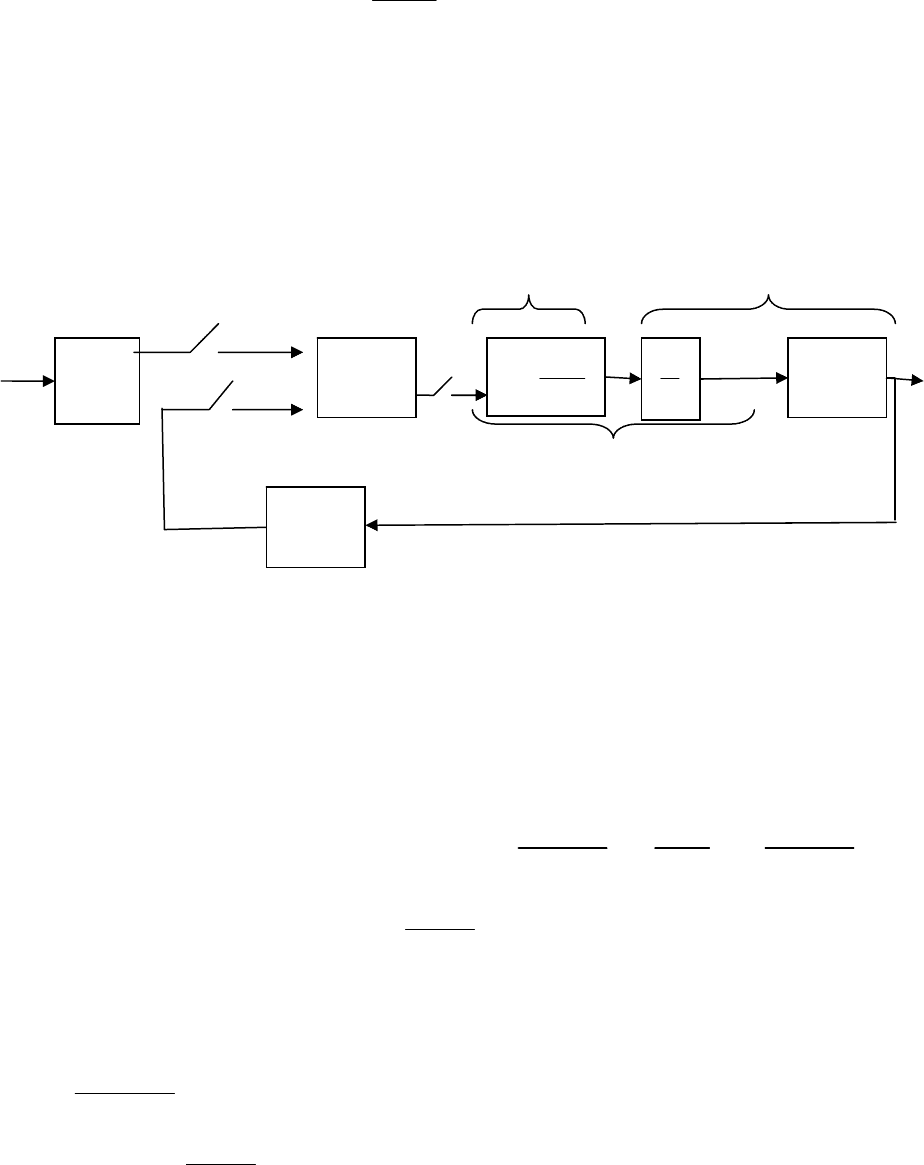
микроЭВМ. Типовая структура одноконтурной САУ обычно имеет вид:
Рис. 23.1
И содержит АЦП
1
и АЦП
2
, ЦАП, микроЭВМ и непрерывную часть.
Кодироваться в АЦП может входное задающее воздействие
х(t), управляемая
величина
y, а также другая информация, поступающая извне. В результате
такого кодирования на вход микроЭВМ в дискретные моменты времени
поступают цифровые представления этих величин «
x
0
» и «y
0
». С выхода
микроЭВМ выдается в дискретные моменты времени управляющее
воздействие «
u
0
» в виде цифрового кода, которое в ЦАП преобразуется в
непрерывный сигнал «
u» и поступает на вход непрерывной части системы.
В конкретных реализациях САУ возможны разновидности:
− АЦП
1
отсутствует и задающее воздействие х
0
поступает сразу в
цифровой форме от другой ЭВМ более высокого уровня;
−
задающее воздействие не вводится извне в микроЭВМ, а рассчитывается
внутри программным путем;
−
применяется цифровой датчик обратной связи, в связи с этим
отсутствует АЦП
2
.
Достоинства цифровых регуляторов по сравнению с аналоговыми:
−
большая надежность;
−
устойчивость к шумам;
−
небольшие габаритные размеры, которые имеют тенденцию к
снижению, так же как и стоимость;
−
одним из существенных преимуществ цифровых контроллеров является
их большая гибкость по сравнению с аналоговыми регуляторами.
Программа цифрового регулятора может быть изменена при изменении
характеристик объекта без изменения в аппаратном обеспечении.
23.2. Особенности цифровых САУ
Цифровым системам присущи физические ограничения, определяемые
дискретными процессами и элементами, которых нет в аналоговых системах.
1. Дискретность по времени зависит от скорости выполнения
процессором арифметических операций, которая относительно мала.
x(t)
x
0
u
0
u
y
y
0
АЦП
1
АЦП
2
Микро-
ЭВМ
ЦАП Непрерыв-
ная часть
186
То есть аппаратная реализация цифровой САУ накладывает ограничения на
частоту квантования по времени.
2. Второе ограничение связано с конечной длиной машинного слова, то
есть все числа округляются. Длина слова обычно равна 8 бит.
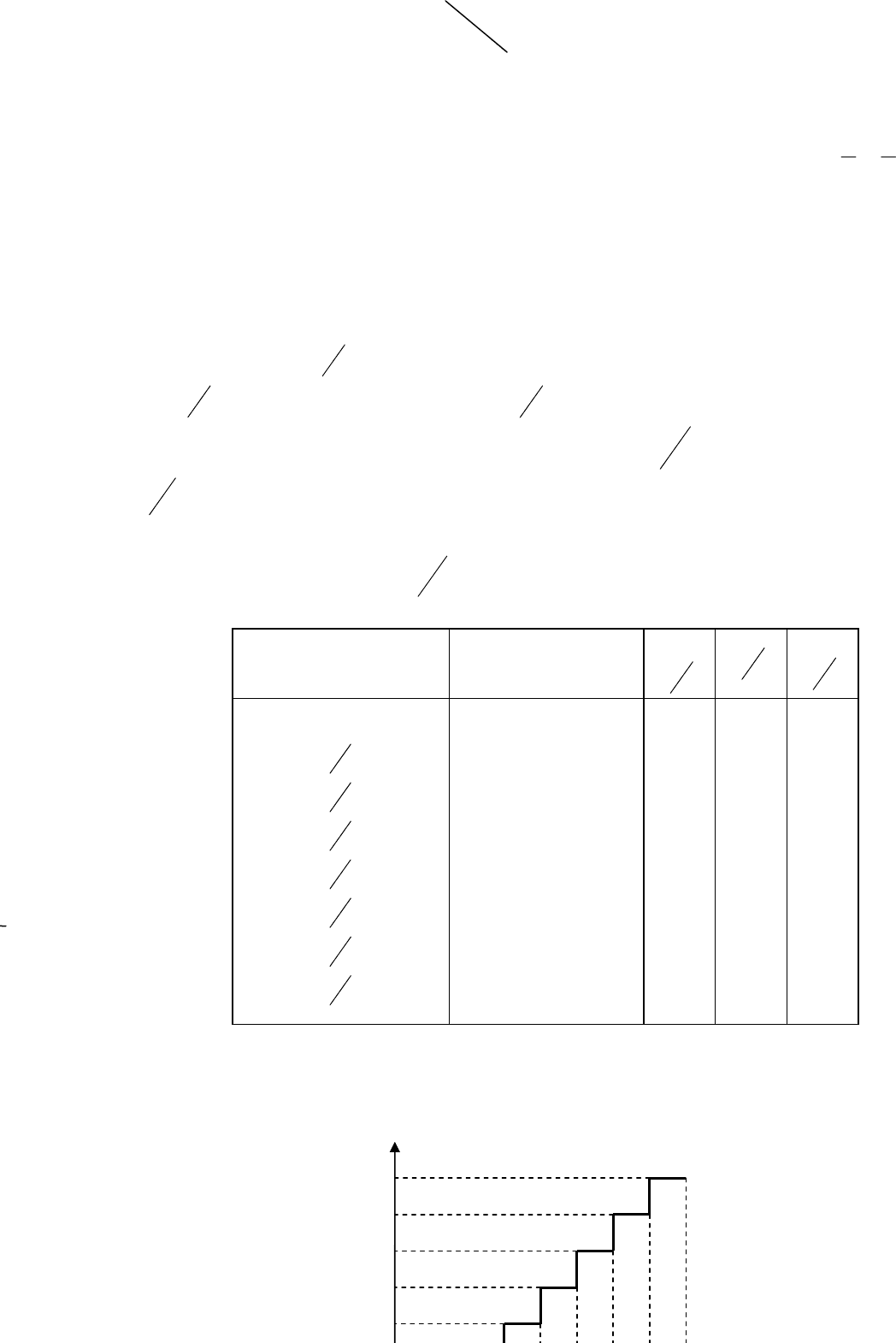
3. ЦАП и АЦП имеют статические характеристики ступенчатого типа,
где существует конечное число уровней разрешения. Этот эффект носит
название квантования
по уровню и в общем случае его необходимо
учитывать при проектировании.
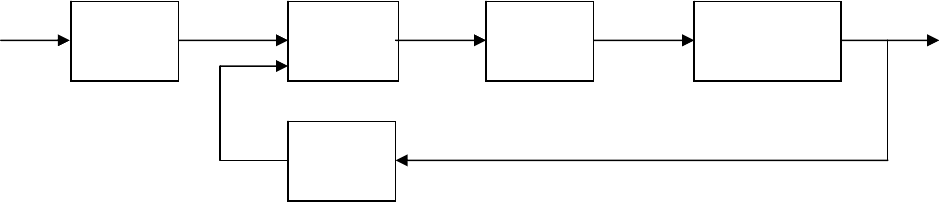
Рис. 23.2
С учетом квантования по времени и уровню структурная схема
цифровой САУ имеет вид:
Замыкание ключей на выходе и входе микроЭВМ, происходит не
одновременно, а с интервалом ΔT. Эта задержка равна времени,
затрачиваемому на аналого-цифровое преобразование и обработку
информации в микроЭВМ. Обычно интервал ΔT мал по сравнению с
постоянными времени
непрерывной части системы и им можно пренебречь,
считая, что ключи замыкаются синхронно.
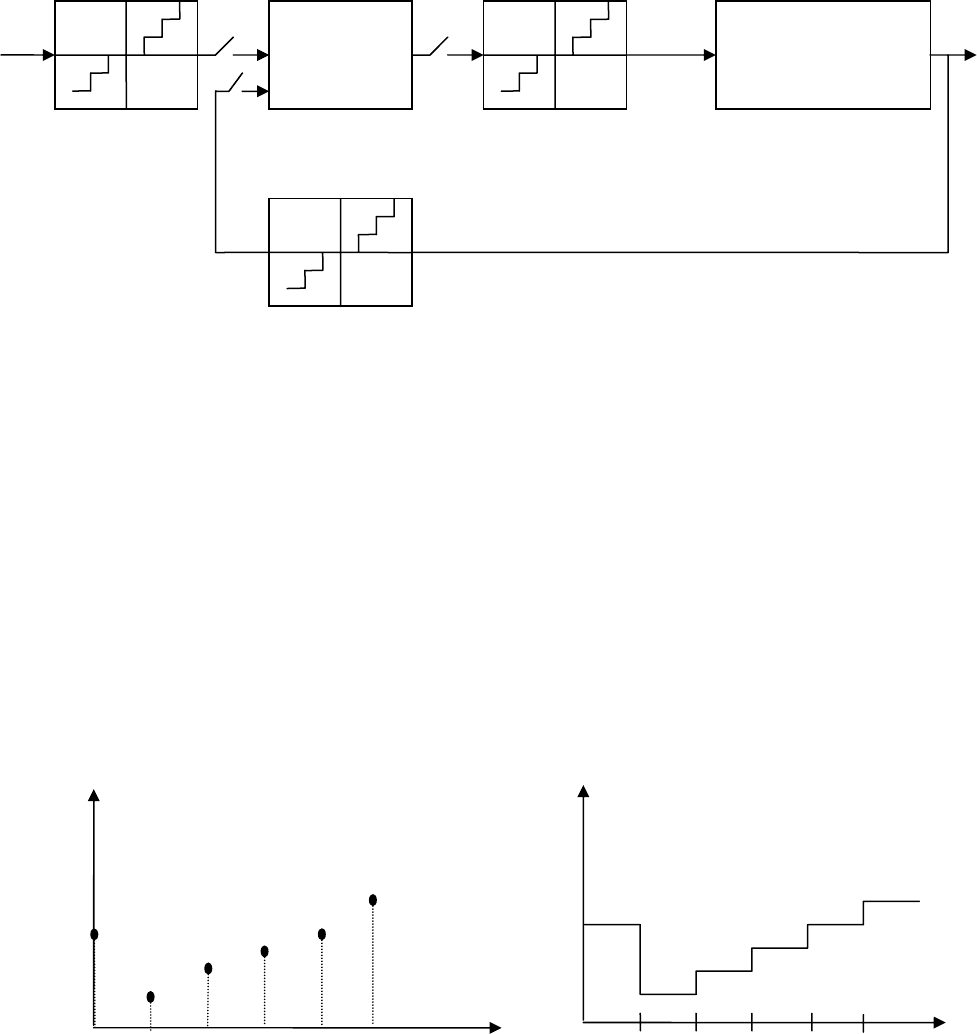
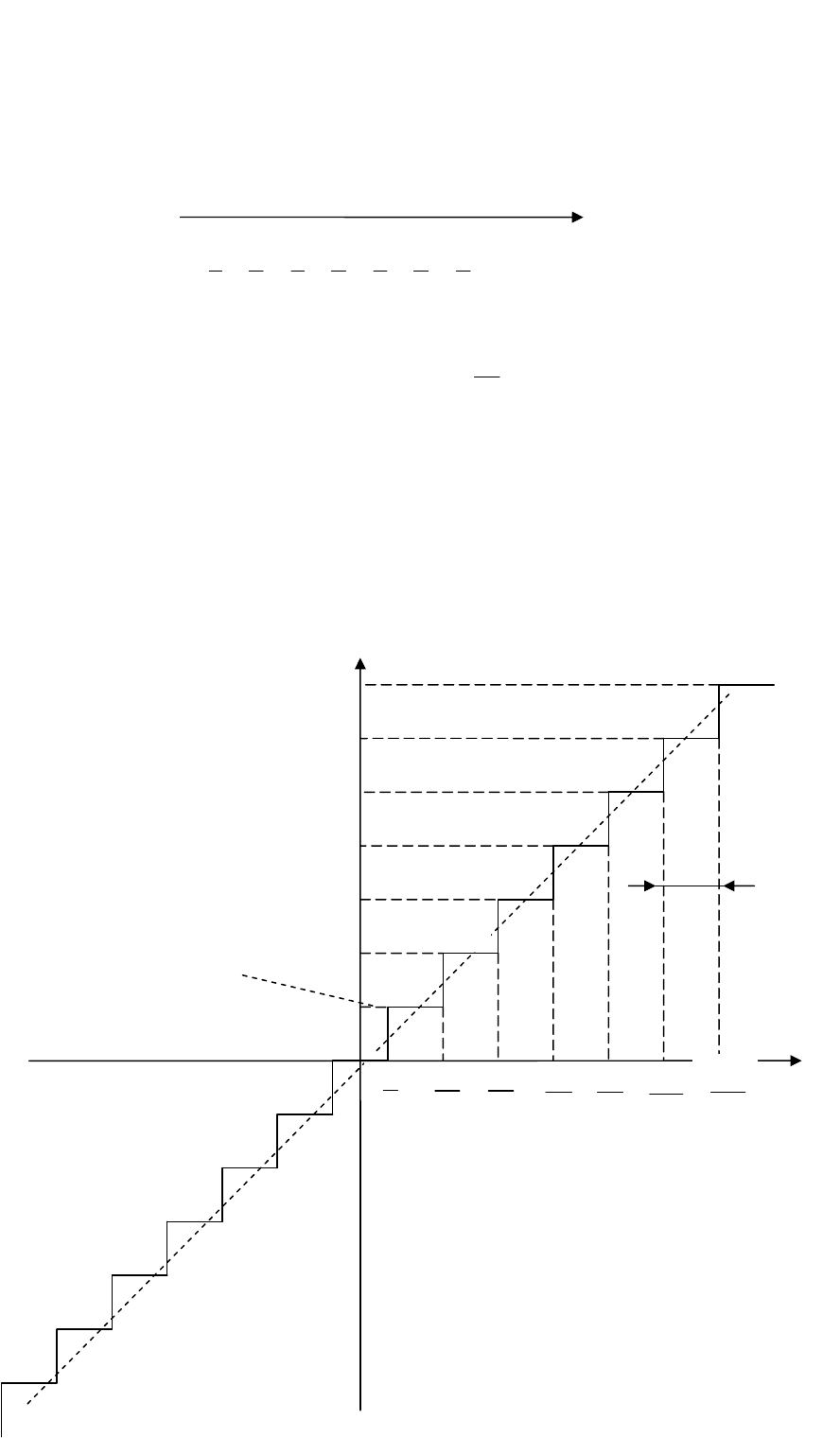
ЦАП обычно преобразует цифровой код в аналоговый сигнал в момент
времени равный
lTt = и удерживает его постоянным до момента времени
()
Tlt 1+= .
U
0
U
Код Аналоговый
сигнал
0 T 2T 3T 4T 5T t 0 T 2T 3T 4T 5T t
Рис. 23.3
микроЭВМ
W
H
(p)
АЦП
2
ЦАП
АЦП
1
x
x
0
T
u
0
u
T
y
y
0
187
«двоичная запятая»
ЦАП
W
Ф
(р)
u
0
u
T
Таким образом, на выходе ЦАП существуют прямоугольные импульсы
с длительностью Т.
Устройство, которое позволяет восстановить непрерывный сигнал
между дискретными моментами времени называют экстраполятором. В
данном случае это экстраполятор нулевого порядка, так как сигнал внутри
такта постоянный, то его называют также фиксатором.
У экстраполятора первого порядка сигнал внутри такта экстраполируется по
линейному
закону и т.д.
Так как ключ замыкается через период Т, то эквивалентная схема ЦАП имеет
вид:
Рис. 23.4
Формирующее звено должно обеспечивать на выходе прямоугольные
импульсы с периодом Т, тогда его передаточная функция должна быть
равна
0
111
() 1
T
pT
pt
Ф
ez
Wp edt
pzp
−
−
−−
=⋅ = = ⋅
∫
.
23.3. Преобразование данных и квантование по уровню
Прежде чем рассмотреть АЦ и ЦА преобразования вспомним
представление чисел в форме с фиксированной запятой.
Целое число N равно
0
0
1
1
2
2
1n
1n
2a2a2a2aN ++++=
−
−
K ,
где коэффициенты a
i
равны 0 или 1.
Слева десятичное число, справа двоичное число с n – разрядами.
При 3-разрядном двоичном числе получим 2
3
значений слова N или
восемь чисел.
Десятичное число 0 1 2 3 4 5 6 7
Двоичное число 000 001 010 011 100 101 110 111
Дробное число N с фиксированной запятой:
a
4
a
3
a
2
a
1
a
0
a
-1
a
-2
a
-3
Целая часть Дробная часть
188
3
3
2
2
1
1
0
0
1
1
2
2
3
3
4
4
2a2a2a2a2a2a2a2aN
−
−
−
−
−
−
+++++++= .
Например, двоичное число 01001,101 эквивалентно десятичному
625,9
8
1
2
1
182120212120202120
32101234
=+++=⋅+⋅+⋅+⋅+⋅+⋅+⋅+⋅
−−−
.Вообще n-разрядная дробь может быть представлена
n
n
2
2
1
1
2a2a2aN
−
−
−
−
−
−
+++= K ,
где
1
a
−
– старший бит;
n
a
−
– младший бит.
Рассмотрим трехразрядную двоичную дробь.
Из таблицы следует, что старший бит (СБ) 3-разрядного двоичного
числа имеет вес
2
1
от максимального значения числа (МЗЧ), 2-й бит имеет
вес
4
1
МЗЧ и младший бит (МБ) –
8
1
МЗЧ.
Для n – разрядного числа МБ имеет вес
МЗЧ
2
1
n
, а СБ имеет вес
МЗЧ
2
1
.
Таким образом, n – разрядное слово определяет 2
n
различных
состояний с разрешением
n
2
1
.
Таблица 23.1
Правильная дробь Двоичная дробь
СБ,
2
1
×
4
1
×
МБ
8
1
×
8
7
4
3
8
5
2
1
8
3
4
1
8
1
0
0,000
0,001
0,010
0,011
0,100
0,101
0,110
0,111
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
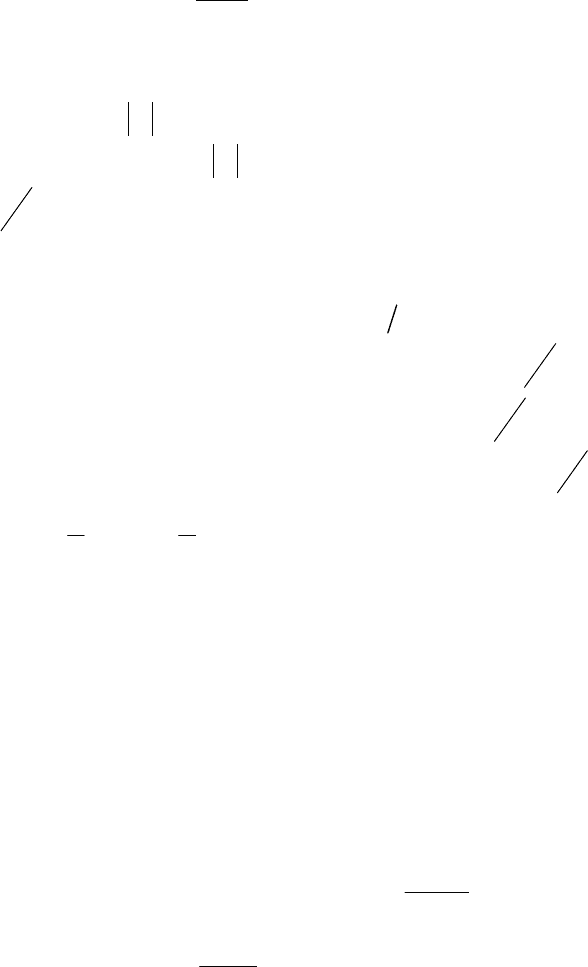
На рисунке 23.5 показано соответствие между цифровым и аналоговым
сигналами.
Машинное слово (дробь)
0
,
111
0
,
110
189
А(аналоговый сигнал)
8
1
4
1
8
3
2
1
8
5
4
3
8
7
1
Рис. 23.5
Разрешение или величина ступеньки равна
3
2
1
. При n = 4 график будет
иметь 16 уровней. Таким образом, аналоговое число округляется до
ближайшего значения.
Рассмотрим характеристику трехразрядного АЦП
0
,
000
0
,
001
0
,
010
0
,
000
0
,
101
0
,
100
0
,
011
A
11
2
q
9
2
q
7
2
q
5
2
q3
2
q
2
q
q
7/8МЗЧ
7q
6q
5q
4q
3q
2q
q
3/4МЗЧ
5/8МЗЧ
1/2МЗЧ
3/8МЗЧ
1/4МЗЧ
1/8МЗЧ
n=3
13
2
q
190
Рис. 23.6. Характеристика вход – выход 3-х разрядного АЦП
Параметр q, значение которого равно МБ слова, называется шагом
квантования
max
2
n
A
q = .
Точное преобразование аналогового сигнала в цифровой имеет место
при значениях : q; 2q; …; 6q.
Если
0.5
A
q< , то двоичный цифровой сигнал равен 000,
если
0.5 1.5qA q≤< , то двоичный цифровой сигнал равен 001
(
qМЗЧ
8
1
= ).
Разница между аналоговым сигналом и цифровым выходом называется
ошибкой квантования и зависит от числа уровней квантования.
Максимальная ошибка равна
2q
±
.
Рабочий диапазон квантователя равен
МЗЧ
8
7
, а не МЗЧ.
Если A
max
= 10В, то МЗЧ=10В; а B25.1МЗЧ
8
1
q == .
Следовательно, максимальная ошибка
B
q
625.0
2
±= , а максимальное
число
B375.9
2
q
МЗЧ
8
7
=+ .
23.4. Линеаризация статических характеристик АЦП и ЦАП
Так как характеристики имеют ступенчатый вид, то метод
линеаризации путем разложения в ряд Тейлора неприменим.
При условии, что изменение входного сигнала по своей величине
значительно больше единицы младшего разряда преобразователя, то можно
пренебречь ступенчатостью характеристики и линеаризовать ее, проведя
некоторую «среднюю» прямую.
Коэффициент передачи для линеаризованной характеристики:
АЦП
q
K
1
2
= ,
где
n
АЦП
A
q
2
max
= – приращение аналоговой величины ”y” на входе
АЦП, соответствующее изменению выходной величины
”y
о
” на одну
дискретную единицу.
Для ЦАП характеристика имеет подобный вид, только изменяются
обозначения по осям координат, тогда коэффициент передачи:
ЦАП
qK
=
3
,
191
где q
ЦАП
– приращение выходного сигнала ЦАП «u» при изменении на
одну дискретную единицу входного сигнала “
u
0
”.
Обычно число разрядов АЦП и ЦАП равно и преобразователи
соединены последовательно, тогда коэффициент передачи преобразователей
будет равен
1
1
32
=⋅=⋅
ЦАП
АЦП
q
q
KK .
Обычно число разрядов АЦП и ЦАП
10≥n
, поэтому погрешность
подобной линеаризации мала, и квантование по уровню можно не
учитывать.
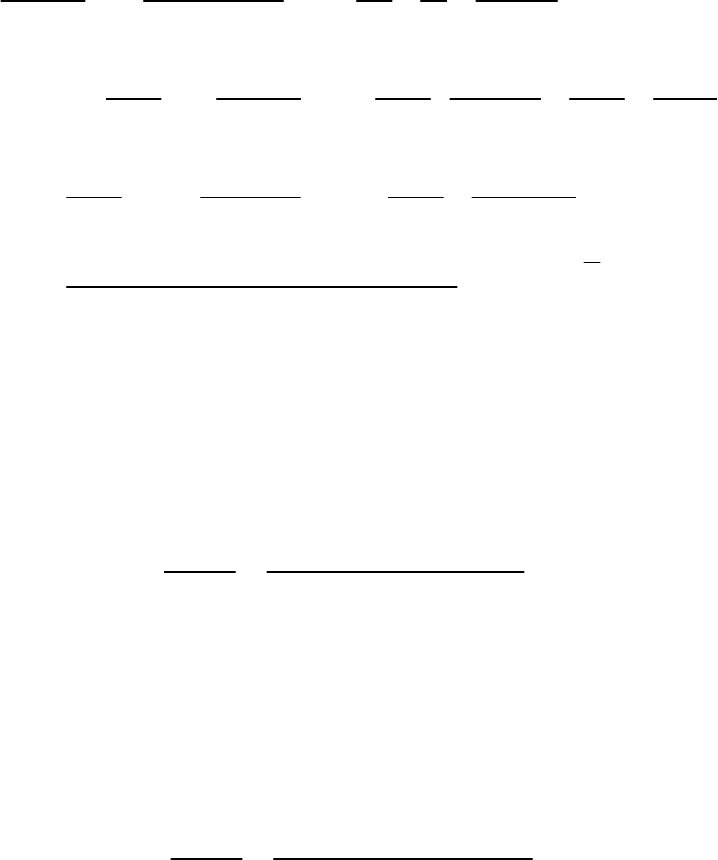
23.5. Структурная схема и передаточная функция цифровой САУ
Структурная схема САУ после линеаризации имеет вид (рис. 23.7).
Рис. 23.7
На рис. 23.7 обозначено: K
1
и K
2
– коэффициенты АЦП
1
и АЦП
2
, K
3
,
D(z), W
H
(p).
Найдем передаточные функции отдельных элементов.
1. Дискретная передаточная функция непрерывной части
() () ( )
{}
()
(
)
(
)
...
1
HH
HT ПНЧ T
Wp Wp
z
W z Wz W p Wz
pz p
⎧
⎫⎧⎫
−
=⋅Ζ =⋅Ζ =⋅Ζ
⎨
⎬⎨⎬
⎩⎭ ⎩⎭
Передаточную функцию
⎭
⎬
⎫
⎩
⎨
⎧
Ζ
p
pW
H
)(
- можно найти, применяя
разложение на простые дроби и используя таблицу z – преобразования для
простых слагаемых.
Пример
. Дана передаточная функция непрерывной части
)1(
)(
1
+
=
pTp
K
pW
H
.
Выражение
p
pW
H
)(
- разложим на простые дроби.
W
T
(p)
W
п.н.ч.
(p)
АЦП
1
K
1
D(z)
K
2
z
1z
K
3
−
W
H
(p)
p
1
ЦВМ
T
X
X
0
U
0
U
W
ф
(p)
T
Y
0
АЦП
2
Y
192
()
2
11
22
11
() 1 1
11
H
Wp T T
KK
p p Tp p p Tp
⎛⎞
==−+
⎜⎟
++
⎝⎠
.
()
11
2
11
1
1() 1
()
1
1
(1) (1 )
11
H
H
zWpzTzTzTz
Wz K
zp z zzd
z
TTz TTd
KT K
zzdzzd
⎛⎞
⎧⎫
−−
=⋅Ζ = −+ =
⎜⎟
⎨⎬
⎜⎟
−−
−
⎩⎭
⎝⎠
−−
⎛⎞⎛⎞
=−+ =− =
⎜⎟⎜⎟
−− −−
⎝⎠⎝⎠
[
]
()( )
1
11
(1 ) (1 )
,
1
T
T
TT d zT d dT
K
de
zzd
−
⎛⎞
−−⋅+−−
==
⎜⎟
−−
⎝⎠
.
2. Передаточная функции ЭВМ.
Она представляет собой отношение изображений дискретного
выходного и входного сигналов.
В общем случае передаточная функция имеет вид:
1
001
1
001
()
()
()
SS
S
kk
k
Uz bz bz b
Dz
E
zazaz a
−
−
+
++
==
+
++
K
K
,
где E
0
(z) и U
0
(z) – изображения решетчатых функций
)n(y)n(x)n(e
000
−= и )n(u
0
.
Заметим, что должно выполняться условие
ks
≤
.
Поделим числитель и знаменатель на z
k
, тогда для предельного случая
s = k, получим
1
001
1
001
()
()
()
k
k
k
k
Uz b bz bz
Dz
E
zaaz az
−
−
−
−
+++
==
+++
K
K
.
Последнее выражение представим:
(
)
(
)
)z(Ezbzbb)z(Uzazaa
0
k
k
1
100
k
k
1
10
⋅+++=⋅+++
−−−−
KK .
C учетом теоремы запаздывания справедливы соотношения:
[]
[]
).z(FzT)mn(f
),z(F)n(f
m−
=−
=
Ζ
Ζ
При переходе к оригиналам, с учетом теоремы смещения на целое
число тактов, получим:
() ( )
[
]
(
)
[
]
() ( )
[]
()
[]
.TknebT1nebnTeb
TknuaT1nuanTua
0k0100
0k0100
−++−+=
=
−
+
+
−
+⋅
K
K