Schulz M. Control Theory in Physics and Other Fields of Science: Concepts, Tools, and Applications
Подождите немного. Документ загружается.


3.4 Control of Linear Oscillations and Relaxations 85
and derivatives can capture parsimoniously long-run structures [45] that de-
cay very slowly. The advantage of fractional derivatives is that these involve
only one parameter, the fractional order α of the derivation. This makes frac-
tional derivatives and integrals an interesting candidate for several theoretical
approaches.
The fractional integral can be introduced in the following way. First of all
we define the nth order integral over a given function as the inverse n-order
derivative
'
d
n
=(d/dt)
n
'
d
−n
f(t)=
t
0
dξ
1
ξ
1
0
dξ
2
...
ξ
n−1
0
dξ
n
f(ξ
n
)
=
1
(n − 1)!
t
0
dξ (t − ξ)
n−1
f(ξ) . (3.107)
In fact, the application of
'
d
n
on
'
d
−n
f(t) yields
'
d
n
'
d
−n
f(t)=f(t), or more
general we have the group property
'
d
n
'
d
−m
=
'
d
n−m
. Now, we generalize the
integral to a noninteger n and obtain the Riemann–Liouville fractional integral
of order a which corresponds to a derivative of order −a
'
d
−a
f(t)=
1
Γ (a)
t
0
dξ (t − ξ)
a−1
f(ξ) , (3.108)
where Γ (a) is the Gamma function. The operator
'
d
a
is called the fractional
differential operator. We remark that the classical distinction between inte-
grals and derivatives disappears in the fractional calculus. Obviously, (3.108)is
a representation of the memory term with the long-run memory K(t) ∼ t
a−1
.
Let us finally point out the role of fractional derivations in the description
of the time evolution of dynamical systems. By no means, the fractional cal-
culus applied to physical problems provides other physical basic laws. But it
is indeed possible to use the fractional calculus as a completely consistent the-
ory of time evolution of dynamical systems associated with algebraic memory
terms.
3.4.2 Optimal Control of Generalized Linear Evolution Equations
As mentioned above, oscillations and linear relaxations correspond to small
changes of the state variables X against a stable equilibrium or ground state
of the system. Therefore, we may use the same arguments as in Sect. 3.1.2
to introduce a quadratic or linear quadratic performance functional. Then we
are able to construct a generalized action
S = J[X, u]+S
constr
+
I
i=1
λ
i
G
i
+
K
i=1
λ
i
G
i
(3.109)
86 3 Linear Quadratic Problems
with the contributions of constraints (3.101)
S
constr
=
T
0
dtP (t)
X(t) − X
H
(t) −
t
0
H(t − τ)f(τ )dτ
(3.110)
containing the momentum P (t) as a functional Lagrange multiplier. The ho-
mogeneous solution X
H
(t) is given by
X
H
(t)=
n
k=1
H
k
(t)
d
k−1
X(t)
dt
k−1
t=0
. (3.111)
The third term of (3.109) may consider I isoperimeter links
G
i
=
T
0
dtg
i
(t, X(t)) = 0 i =1,...,I , (3.112)
while the last term is a consequence of the possible point constraints
G
i
= g
i
(t
i
,X(t
i
)) = 0 0 <t
i
<T i=1,...,K , (3.113)
which are coupled to the generalized action via the Lagrange multipliers λ
i
and λ
i
. The structure of the generalized action allows us to determine the
Lagrangian L, which is given by
L =
1
2
[X(t)Q(t)X(t)+u(t)R(t)u(t)] +
1
2
Y (T )ΩY (T )δ(t − T )
+ P (t)
X(t) −
n
k=1
H
k
(t)
d
k−1
X(t)
dt
k−1
t=0
−
t
0
H(t − τ)f(τ )dτ
+
I
i=1
λ
i
g
i
(t, X(t)) +
K
i=1
λ
i
g
i
(t, X(t)) δ(t − t
i
) . (3.114)
The main difference with the Lagrangian discussed in Sect. is the lack
of the velocities
˙
X(t). On the other hand, we have the disadvantage that
the Lagrangian is no longer local in time. For the sake of simplicity, we now
focus on a problem without constraints of type (3.112) and (3.113) and with
vanishing initial conditions for the state vector X
8
. Then, the variation of
the generalized action with respect to the momentum P leads again to the
dynamic equation
X
∗
(t)=
t
0
H(t − τ)[ψ(τ )+Bu
∗
(τ)] dτ (3.115)
8
We remark that the consideration of isoperimetric constraints, point constraints,
and nonvanishing initial conditions for the state vector does not change the below-
discussed general relation between the state dynamics and the control functions.
2.4.1
3.4 Control of Linear Oscillations and Relaxations 87
for the optimum trajectory. Note that we have substituted the forces by the
superposition (3.97) of external sources and control forces. The variation with
respect to the state X yields
P
∗
(t)=−Q(t)X
∗
(t) , (3.116)
while the variation with respect to the control functions gives
u
∗
(t)=R
−1
(t)
T
0
B
T
H
T
(τ − t)P
∗
(τ)dτ . (3.117)
Finally, the substitution of (3.116)in(3.117) eliminates the momentum from
the control equations, and we obtain
u
∗
(t)=−R
−1
(t)
T
t
B
T
H
T
(τ − t)Q(τ)X
∗
(τ)dτ. (3.118)
This relation and (3.115) are a complete set of integral equations determining
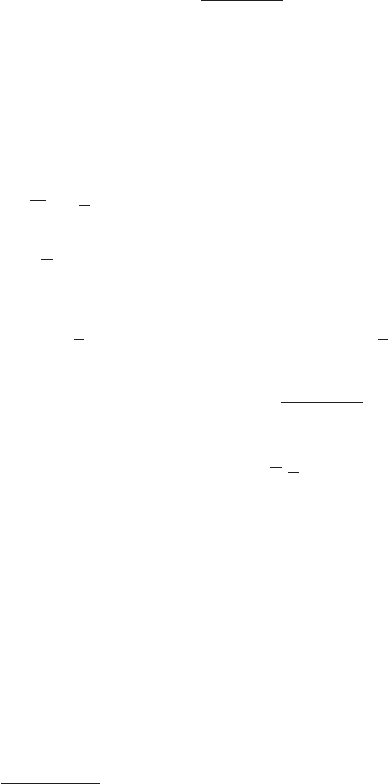
the corresponding control problem. It is interesting to remark that (3.115)
requires the history of all controls in order to determine the current state
while the current control follows from the future evolution of the state; see
(3.118) and Fig. 3.8. This does not contradict the physically necessary causal-
ity because the optimal trajectory and the optimal control are defined by the
complete knowledge of the evolution of the environment, given by ψ(t), and
the control parameters, Q(t)andR(t), over the whole period [0,T]. Finally,
the substitution of (3.115)in(3.118) leads to a closed relation between the
external forces and the optimum answer via the control functions
T
T
t
t
u( )τ
X( )τ
τ
τ
Fig. 3.8. Schematic representation of causality and anticausality in the relations
between the optimal trajectory and the optimal control function

88 3 Linear Quadratic Problems
R(t)u
∗
(t)+
T
0
dτB
T
U (t, τ) Bu
∗
(τ)=−
T
0
dτB
T
U (t, τ) ψ(τ) (3.119)
with
U (t, τ)=
T
max(t,τ)
dτ
H
T
(τ
− t)Q(τ
)H(τ
− τ) . (3.120)
The integral equation (3.119) is of the Fredholm type. Although the theory
of the class of integral equations is well established, a quantitative solution of
(3.119) usually needs a numerical support.
We end this chapter with an important remark concerning the estimation
of the performance. As we have stressed repeatedly, the performance or cost
functional has no strict physical meaning, in contrast to the constraints, i.e.,
the equations of motion for the system state. That means in the case of a
quadratic performance, the weight matrices, Q and R, must be chosen em-
pirically with respect to the control aim. But this is, with the exception of
the formulation of the classical mechanics as a special control problem, by no
means a pure physical task. Economical and technical factors may be as impor-
tant as physical arguments. An often used performance is the time-averaged
energy of the system [46], but the power of heat loss [47] or the injected energy
from a certain external source are also reasonable cost functionals.
3.4.3 Perturbation Theory for Weakly Nonlinear Dynamics
If a sufficiently complex system contains nonlinear terms in its equations of
motion, then it is, as a rule, often impossible to determine a closed analytical
solution. In this case, an approximative solution may be helpful. The standard
method is a perturbation expansion, which is also denoted by the concept of
successive approximations. Let us add a small nonlinear term to the evolution
equation (3.98) of the state X,
'
dX(t)+εΦ(t, X(t)) = f (t) . (3.121)
For the sake of simplicity, we have set
+
M = 1. The modification of (3.121)
leads to slightly changed integral equations for the optimum control, namely
X
∗
(t)=
t
0
H(t − τ)[ψ(τ ) − εΦ(τ, X
∗
(τ)) + Bu
∗
(τ)] dτ (3.122)
for the optimum trajectory, and
P
∗
(t)=−Q(t)X
∗
(t)+ε
∂Φ
T
(t, X)
∂X
X=X
∗
(t)
T
t
H
T
(τ −t)P
∗
(τ)dτ (3.123)

3.4 Control of Linear Oscillations and Relaxations 89
for the momentum. The equation for the control function remains unchanged
u
∗
(t)=R
−1
(t)
T
τ
B
T
H
T
(τ − t)P
∗
(τ)dτ. (3.124)
The set of equations (3.122), (3.123), and (3.124) can now be treated in
terms of a perturbation theory. The first step is the calculation of the ref-
erence solution (P
∗
0
,X
∗
0
,u
∗
0
) corresponding to ε = 0. In a subsequent step,
these solutions are substituted into the right-hand side of the three equations
considering now the small perturbation. Then, the left-hand side of (3.122),
(3.123), and (3.124) yield the first approximation
9
(P
∗
1
,X
∗
1
,u
∗
1
). The succes-
sive repetition of this procedure leads eventually to a convergence of the series
(P
∗
i
,X
∗
i
,u
∗
i
)(i =0, 1, 2,....) to the solution of systems (3.122), (3.123), and
(3.124). The convergence of this successive approximation method depends on
the underlying system. It is still an open problem whether a series converges
or not. Some necessary and sufficient conditions can be found in the literature
[48, 49, 50, 51]. However, the first-order correction is often a sufficient quan-
titative estimation of the effects due to a small nonlinearity in the evolution
equations of the system.
Finally, we remark that a large class of weak nonlinear control problems
is related to bilinear systems. They represent large number of real world phe-
nomena [53, 54, 55]. Bilinear control systems are described by the following
evolution equation:
N
β=1
'
d
αβ
X
β
+
N
β=1
N
γ=1
Γ
γ
αβ
X
β
u
γ
= ψ
α
(t)+
N
γ=1
B
αγ
u
γ
. (3.125)
The bilinear contributions, X
β
u
γ
, distinguish (3.125) from the above-
discussed linear ones. Although bilinear systems are also a special case of
nonlinear interacting systems, bilinear systems were brought to attention. A
first comprehensive study was given by Wiener [52], who believed that such
equations are the essence of understanding the behavior of neural networks.
Very import problems, such as the control of nuclear reactors [56], of the
dynamics of heat exchange [57], or of the induction motor systems [58], and
rotary multi motor systems [59] were successfully described by bilinear sys-
tems.
Although the structure of (3.125), does not seem to be very complicated,
the control equations of bilinear systems are very hard to handle. In general,
there exists no analytical solution. However, it has been shown [60]thatthe
method of successive approximations converges to a stable solution under
relatively weak conditions.
9
That means the reference state plus the first-order correction in the language of
the perturbation theory.
90 3 Linear Quadratic Problems
References
1. M. Caccamo, L. Y. Zhang, L. Sha and G. Buttazzo: ‘An Implicit Prioritized
Access Protocol for Wireless Sensor Networks’ in Proceedings of the 23rd IEEE
Real-Time Systems Symposium (RTSS’02), Austin, Texas, USA, December 3-5,
2002. (IEEE Computer Society Press, Los Alamitos CA, 2002) page 39–48. 81
2. V.I. Arnold: Geometrische Methoden in der Theorie gew¨ohnlicher Differential-
gleichungen (Deutscher Verlag der Wissenschaften, Berlin, 1987) 66
3. C.L. Siegel: Ann. Math. 46, 423 (1945) 66
4. S. Bittani, A.J. Laub, J.C. Willems (eds): The Ricatti Equation (Springer, Berlin
Heidelberg New York, 1991) 72
5. B.A. Francis, W.M. Wonham: Automatica 12, 457 (1976) 72, 73
6. P. Lancaster, L. Rodman: Algebraic Ricatti Equations (Oxford Science Publica-
tions, Oxford, 1995) 79
7. A. Locatelli: Raccolta di problemi di controllo attimo (Pitagora, Bologna, 1989) 72, 77
8. V.M. Mehrmann: The Autonomous Linear Quadratic Control Problem: Theory
and Numerical Solutions (Springer, Berlin Heidelberg New York, 1991) 72
9. A. Saberi, B.M. Chen, P. Sannuti: Loop Transfer Recovery Analysis and Design
(Springer, Berlin Heidelberg New York, 1993) 73
10. M. Kourensky: Proc. London Math. Soc. 24, 202 (1926) 75
11. R. Lagrange: Bull. Soc. Math. France 66, 155 (1938) 75
12. L. Tchacaloff: Giornale Mat. 63, 139 (1925) 75
13. E. Kamke: Differentialgleichungen, L¨osungsmethoden und L¨osungen (Akademis-
che Verlagsgesellschaft, Leipzig, 1951) 75
14. M.G. Safonov, M. Athans: Gain and phase margin for multiloop LQG regulators.
IEEE Trans. Automat. Control AC 22, 173 (1977) 77
15. A. Locatelli: Elementi di controllo ottimo (CLUP, Milano, 1987) 77
16. P. Rudra: Getting Started with Matlab 5: A Quick Introduction for Scientists
and Engineers (Oxford University Press, New York, 1999) 81
17. M.H. Raibert: Legged Robots that Balance (MIT Press, Cambridge, MA, 1997) 81
18. S. Yurkovich, M. Widjaja: IFAC Control Eng. Pract. 4, 445 (1996) 81
19. M. Widjaja, S. Yurkovich: Intelligent control for swing up and balancing of an
inverted pendulum systems. In: Proceedings of the IEEE International Confer-
ence on Control Applications, Albany, NY, September 28–29, 1995, p. 534 81
20. C.C. Chung, J. Hauser: Automatica 31, 851 (1995) 81
21. K.J. Astrom, K. Furuta: Automatica 36, 287 (2000) 81
22. H. Nijmeijer, A.J. van der Schaft: Nonlinear Dynamical Control Systems
(Springer, Berlin Heidelberg New York, 1990) 81
23. A. Isidori: Nonlinear Control Systems (Springer, Berlin Heidelberg New York,
1989) 81
24. H.-F. Chen, D.-Z. Cheng, J.-F. Zhang, A. Isidori, C.V. Hollot: Nonlinear System
II, Optimal Control Proceedings of the 14th World Congress of IFAC (Pergamon
Press, New York, 1999) 81
25. S.H. Strogatz: Nonlinear Dynamics and Chaos (Addison-Wesley, Reading, MA,
1994) 81
26. M. Caccamo, L.Y. Zhang: J. Embedded Comput. 1, 2 (2004) 81
27. E. Cox: The Fuzzy Systems Handbook: A Practitioner’s Guide to Building, Us-
ing, and Maintaining Fuzzy Systems (Academic, New York, 1993) 81
References 91
28. T.L. Crenshaw, A. Tirumala, S. Hoke, M. Caccamo: A robust implicit access
protocol for real-time wireless collaboration. In: Proceedings of the IEEE Eu-
romicro Conference on Real-Time Systems, Palma de Mallorca (2005) 81
29. J. Yen, R. Langari, L. A. Zadeh: Industrial Applications of Fuzzy Logic and
Intelligent Systems (IEEE Press, Los Alamitos CA, 1995). 81
30. A. Locatelli: Optimal Control (Birkh¨auser, Basel, 2001) 81
31. M. Einax, M. Schulz: J. Chem. Phys. 115, 2282 (2001) 84
32. W. G¨otze,L.Sj¨ogren: J. Non-Cryst. Solids 131–133, 161 (1991) 84
33. W. G¨otze,L.Sj¨ogren: Rep. Prog. Phys. 55, 241 (1992) 84
34. U. Balucanu, M. Zoppi: Dynamics of the Liquid State (Clarendon Press, Oxford,
1994) 84
35. U.H.E. Hansmann, L.T. Wille: Phys. Rev. Lett. 88, 068105 (2002) 84
36. E. Leutheusser, Phys. Rev. A 29, 2765 (1984) 84
37. S.A. Brawer: Relaxation in Viscous Liquids and Glasses (American Ceramic
Society, New York, 1983) 84
38. R. Balescu: Equilibrium and Nonequilibrium Statistical Mechanics (Wiley, New
York, 1975) 84
39. S. Doniach, E.H. Sondheimer: Green’s Functions for Solid State Physicists (Im-
perial College Press, London, 1998) 84
40. D. Zubarev, D. Zubarev, G. R¨opke: Statistical Mechanics of Nonequilibrium
Processes: Basic Concepts, Kinetic Theory (Akademie-Verlag, Berlin, 1996) 84
41. E. Donth: Relaxation and Thermodynamics in Polymers (Akademie-Verlag,
Berlin, 1992) 84
42. N.G. McCrum, B.E. Read, G. Williams: Anelastic and Dielectric Effects in Poly-
meric Solids (Wiley, New York, 1967) 84
43. E. Bartsch, O. Debus, F. Fujara, M. Kiebel, W. Petry, H. Sillescu, J.H. Magill:
Physica B 180–181, 808 (1992) 84
44. R. Hilfer: Fractional Derivatives in static and dynamics scaling. In: Scale In-
variance and Beyond ed by B. Dubrulle, F. Graner, D. Sornette (EDP Sciences
and Springer, Berlin Heidelberg New York, 1997), pp. 54–62 84
45. J. D. Hamilton Time Series Analysis (Princeton University Press, Princeton,
New Jersey, 1994). 85
46. V.L. Veitz, M.Z. Kolovsky, A.E. Kotchura: Dynamics of Guided Machine Units
(Nauka, Moscow, 1984) 88
47. A.M. Ashavskii, A.Y. Sheinbaum: Power Impuls Systems (Mashinostroenie,
Moscow, 1978) 88
48. A. Kovaleva: Optimal Control of Mechanical Oscillations (Springer, Berlin Hei-
delberg New York, 1999) 89
49. M.Z. Kolovsky: Prikl. Mat. Mekh. 4, 738 (1960) 89
50. H. Kwakernaak, R. Sivan: Linear Optimal Control Systems (Whiley-
Interscience, New York, 1972) 89
51. J.G. Malkin: Theorie der Stabilit¨at einer Bewegung (Oldenbourg, M¨unchen,
1959) 89
52. N. Wiener: Cybernetics (MIT Press, Cambridge, 1948) 89
53. R. Mohler: Nonlinear Systems—Applications to Bilinear Control (Prentice-Hall,
Englewood Cliffs, NJ, 1991) 89
54. M. Sundareshan, R. Fundkowski: IEEE Trans. Automat. Control 31, 1022
(1986) 89
55. M. Espana, I. Landau: Automatica 14, 345 (1978) 89
92 3 Linear Quadratic Problems
56. R. Mohler, W. Koludziej: IEEE Trans. Syst., Man Cybernet. 10, 683 (1980) 89
57. C. Bruni, D. DiPillo, G. Koch: Richerche di Automatica 2, 11 (1971) 89
58. G. Figalli, M. Cava, L. Tomasi: Int. J. Control 39, 1007 (1984) 89
59. L. Guo, A. Schone, X. Ding: Automatica 30, 1445 (1994) 89
60. W. Cebuhar, V. Constanza: J. Optim. Theory Appl. 43, 615 (1984) 89

4
Control of Fields
4.1 Field Equations
4.1.1 Classical Field Theory
Euler–Lagrange Equations
The theoretical representation of classical mechanics and field theory is very
similar in some ways. This also applies to the axiomatic structure. It is well
known that essential aspects of the classical mechanics can be translated into
the language of field theory. Especially, there exist equivalent relations be-
tween the canonical formalism of the field theory and of the classical mechanics
with respect to the Hamilton principle and the Euler–Lagrange equations. Let
us briefly study the basic ideas of the variational principle for classical fields,
in particular, with respect to some specific features occurring in field theoret-
ical equations. This is not the place to discuss the mathematical and physical
details of this well-established theoretical concept. The interested reader may
find more information in the literature [1, 2, 3, 4]. But this very short overview
should give at least a guideline for the following chapter, namely for the trans-
lation of the previously demonstrated variational method for the control of
systems with a finite set of degrees of freedom to the variational method for
the control of fields.
Of course, we must extend the terms of classical mechanics in such a
way that they become suitable for a field theory. The basic quantities of the
Newtonian mechanics are the positions of the particles, or more general the
set of degrees of freedom which are collected in the state vector X(t). All
admissible states are embedded in a finite-dimensional phase space P.
The state vector is now generalized to a field function
X(t) → Ψ (r,t) , (4.1)
which is defined for each time t and each site r of a given d-dimensional
space R
d
. The knowledge of the geometry and topology of this space and any
M. Schulz: Control Theory in Physics and other Fields of Science
STMP 215, 93–121 (2006)
c
Springer-Verlag Berlin Heidelberg 2006

94 4 Control of Fields
information about a possible fusion with the time coordinate to a continuous
space–time structure as they are known from all modern field theories are not
important for the variational principle. These questions become relevant if we
are interested in solving a special field theoretical problem. Formally, the field
function Ψ (r,t)isanN-dimensional vector describing the N components of
the field at the spatial position r at time t. The physical meaning of the field
components Ψ
i
(i =1,...,N) and their relation to the space R
d
or the space–
time continuum depends on the theory in mind. Scalar field theories have only
one field component
1
, while the Maxwell theory requires a four-dimensional
vector with well-defined symmetry relations and transformation rules between
the field components considering the geometry of the underlying space–time
continuum.
The main difference between the classical mechanics and a field theory is
the dependence of the fields on the spatial coordinates. That means, a field
theory consists of an uncountable infinitely large set of degrees of freedom
2
,
in contrast to the mechanics with a finite number of degrees of freedom.
The field theoretical action is defined as the integral
S =
Ω
d
d
rdtL(t, r,Ψ,∇Ψ, Ψ
t
) (4.2)
over a so-called Lagrange density L with Ψ
t
= ∂Ψ/∂t. Here, Ω is a certain
region of the whole space–time continuum which is defined by possibly time-
dependent boundary conditions. The appearance of gradient terms ∇Ψ is a
typical feature of a physical field theory reflecting the Nahwirkungsprinzip
3
.
Furthermore, we may interpret the integral
L =
Ω
d
d
rL(t, r,Ψ,∇Ψ, Ψ
t
) (4.3)
as Lagrangian in order to obtain another analogy to the classical mechanics.
However, in the framework of a field theory it is much more conventional to
denote the Lagrange density as the Lagrangian.
In the classical mechanics, the Euler–Lagrange equations are the equa-
tions of motion of the underlying system. This statement is also true for a
field theory. Usually, the Euler–Lagrange equations are called the field equa-
tions. The derivation of these equations follows from Hamiltonian’s varia-
tional principle. Just as we have pointed out for the classical mechanics in
1
Or two, in the case of a complex field.
2
In the case of a lattice field theory, the degrees of freedom form a countable
infinite large set or sometimes a finite set (for example on a lattice with a spher-
ical topology). In this sense, lattice field theories may be interpreted as the link
between mechanics and field theory.
3
We remark that several field theories also contain higher derivatives in space
and time. As an example we refer to Einstein’s general relativity theory with a
Lagrangian containing second-order derivatives of the field components.