Руководство. Расширенное программирование, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.


Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
11
Содержание
6.5.4 Сглаживание характеристики ориентации (ORIPATHS A8=, B8=, C8=) ............................ 364
6.6 Сжатие ориентации (COMPON, COMPCURV, COMPCAD) ................................................ 366
6.7 Сглаживание характеристики ориентации (ORISON, ORISOF) ......................................... 369
6.8 Кинематическая трансформация ......................................................................................... 371
6.8.1 Фрезерная обработка на токарных деталях (TRANSMIT) .................................................. 371
6.8.2 Трансформация боковой поверхности цилиндра (TRACYL) .............................................. 375
6.8.3 Наклонная ось (TRAANG) ..................................................................................................... 383
6.8.4 Программирование наклонной оси (G05, G07) ................................................................... 386
6.9 Движение “от точки к точке” в декартовой системе координат.......................................... 388
6.9.1 PTP при TRANSMIT ............................................................................................................... 393
6.10 Граничные условия при выборе трансформации ............................................................... 397
6.11 Отключение трансформации (TRAFOOF) ........................................................................... 398
6.12 Последовательная связь трансформаций (TRACON, TRAFOOF)..................................... 399
7 Коррекции инструмента ........................................................................................................................401
7.1 Память коррекций.................................................................................................................. 401
7.2 Аддитивные коррекции.......................................................................................................... 404
7.2.1 Выбор аддитивных коррекций (DL) ...................................................................................... 404
7.2.2 Определение значений износа и установочных значений ($TC_SCPxy[t,d],
$TC_ECPxy[t,d]) ...................................................................................................................... 406
7.2.3 Удаление аддитивных коррекций (DELDL) .......................................................................... 407
7.3 Коррекция инструмента - специальная обработка ............................................................. 408
7.3.1 Отражение длин инструмента .............................................................................................. 410
7.3.2 Нормирование знака износа ................................................................................................. 411
7.3.3 Система координат активной обработки (TOWSTD, TOWMCS, TOWWCS, TOWBCS,
TOWTCS, TOWKCS) .............................................................................................................. 412
7.3.4 Длина инструмента и смена плоскостей .............................................................................. 415
7.4 Коррекция инструмента Online (PUTFTOCF, FCTDEF, PUTFTOC, FTOCON, FTOCOF) . 416
7.5 Активация коррекций инструмента 3D (CUT3DC..., CUT3DF...)......................................... 421
7.5.1 Активация коррекций инструмента 3D (CUT3DC, CUT3DF, CUT3DFS, CUT3DFF, ISD) .. 421
7.5.2 Коррекция инструмента 3D: периферийное фрезерование, торцовое фрезерование ... 423
7.5.3 Коррекция инструмента 3D: Формы инструмента и данные инструмента для торцового
фрезерования ........................................................................................................................ 425
7.5.4 Коррекция инструмента 3D: Коррекция на траектории, кривизна траектории, глубина
врезания (CUT3DC, ISD) ....................................................................................................... 426
7.5.5 Коррекция инструмента 3D: Внутренние углы/наружные углы и
метод точки
пересечения (G450/G451) ..................................................................................................... 429
7.5.6 Коррекция инструмента 3D: Периферийное фрезерование 3D с ограничивающими
поверхностями ....................................................................................................................... 430
7.5.7 Коррекция инструмента 3D: Учет ограничивающей поверхности (CUT3DCC, CUT3DCCD) .
431
7.6 Ориентация инструмента (ORIC, ORID, OSOF, OSC, OSS, OSSE, ORIS, OSD, OST)..... 435
7.7 Присвоение свободных номеров D, номеров резцов ......................................................... 441
7.7.1 Присвоение свободных номеров D, номеров резцов (адрес СЕ) ...................................... 441
7.7.2 Присвоение свободных номеров D: Проверка номеров D (CHKDNO) .............................. 441
7.7.3 Присвоение свободных номеров D: Переименование номеров D (GETDNO, SETDNO) 442

Содержание
Расширенное программирование
12
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
7.7.4 Присвоение свободных номеров D: Определение номера T для заданного номера D
(GETACTTD) ........................................................................................................................... 443
7.7.5 Присвоение свободных номеров D: Установка номеров D как недействительных
(DZERO) .................................................................................................................................. 444
7.8 Кинематика инструментального суппорта ........................................................................... 445
7.9 Коррекция длин инструмента для ориентируемого инструментального суппорта
(TCARR, TCOABS, TCOFR, TCOFRX, TCOFRY, TCOFRZ)................................................. 451
7.10 Коррекция длин инструмента Online (TOFFON, TOFFOF).................................................. 454
7.11 Изменение данных резцов у вращающихся инструментов (CUTMOD)............................. 457
8 Параметры траектории .........................................................................................................................463
8.1 Тангенциальное управление (TANG, TANGON, TANGOF, TLIFT, TANGDEL) .................. 463
8.2 Характеристика подачи (FNORM, FLIN, FCUB, FPO) ......................................................... 470
8.3 Выполнение программы с памятью предварительной обработки (STOPFIFO,
STARTFIFO, FIFOCTRL, STOPRE) ....................................................................................... 475
8.4 Условно прерываемые сегменты программы (DELAYFSTON, DELAYFSTOF)................. 478
8.5 Пропуск места в программе для SERUPRO (IPTRLOCK, IPTRUNLOCK) ......................... 483
8.6 Повторный подвод к контуру (REPOSA, REPOSL, REPOSQ, REPOSQA, REPOSH,
REPOSHA, DISR, DISPR, RMI, RMB, RME, RMN)................................................................ 486
8.7 Воздействие на управление движением.............................................................................. 495
8.7.1 Процентная коррекция рывка (JERKLIM) ............................................................................. 495
8.7.2 Процентная коррекция скорости (VELOLIM) ........................................................................ 496
8.7.3 Пример программы для JERKLIM и VELOLIM ..................................................................... 499
8.8 Программируемый допуск контура/ориентации (CTOL, OTOL, ATOL).............................. 500
8.9 Допуск для движений G0 (STOLF)........................................................................................ 504
9 Соединения осей ...................................................................................................................................507
9.1 Буксировка (TRAILON, TRAILOF) ......................................................................................... 507
9.2 Таблицы кривых (CTAB)........................................................................................................ 511
9.2.1 Определение таблиц кривых (CTABDEF, CATBEND) ......................................................... 512
9.2.2 Проверка наличия таблицы кривых (CTABEXISTS) ............................................................ 518
9.2.3 Удаление таблиц кривых (CTABDEL) ................................................................................... 519
9.2.4 Блокировка таблиц кривых от удаления и перезаписи (CTABLOCK, CTABUNLOCK) ..... 520
9.2.5 Таблицы кривых: Определение свойств таблиц (CTABID, CTABISLOCK,
CTABMEMTYP, CTABPERIOD) ............................................................................................. 521
9.2.6 Чтение значений таблиц кривых (CTABTSV, CTABTEV, CTABTSP, CTABTEP,
CTABSSV, CTABSEV, CTAB, CTABINV, CTABTMIN, CTABTMAX) ..................................... 523
9.2.7 Таблицы кривых: Проверка использования ресурсов (CTABNO, CTABNOMEM,
CTABFNO, CTABSEGID, CTABSEG, CTABFSEG, CTABMSEG, CTABPOLID, CTABPOL,
CTABFPOL, CTABMPOL) ....................................................................................................... 528
9.3 Осевое соединение по главному значению (LEADON, LEADOF) ...................................... 530
9.4 Электронный редуктор (EG).................................................................................................. 536
9.4.1 Определение электронного редуктора (EGDEF) ................................................................ 536
9.4.2 Включение электронного редуктора (EGON, EGONSYN, EGONSYNE) ............................ 538
9.4.3 Выключение электронного редуктора (EGOFS, EGOFC) ................................................... 541

Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
13
Содержание
9.4.4 Удаление определения электронного редуктора (EGDEL) ................................................ 542
9.4.5 Окружная подача (G95) / электронный редуктор (FPR) ...................................................... 542
9.5 Синхронный шпиндель.......................................................................................................... 543
9.5.1 Синхронный шпиндель: Программирование (COUPDEF, COUPDEL, COUPON,
COUPONC, COUPOF, COUPOFS, COUPRES, WAITC) ...................................................... 544
9.6 Структура Master/Slave (MASLDEF, MASLDEL, MASLOF, MASLOF, MASLOFS).............. 555
10 Синхронные действия движения .........................................................................................................559
10.1 Основы.................................................................................................................................... 559
10.1.1 Область действия и последовательность обработки (ID, IDS) .......................................... 561
10.1.2 Циклическая проверка условия (WHEN, WHENEVER, FROM, EVERY) ............................ 563
10.1.3 Операции (DO) ....................................................................................................................... 565
10.2 Операторы для условий и операций.................................................................................... 566
10.3 Переменные главного хода для синхронных действий...................................................... 568
10.3.1 Системные переменные ........................................................................................................ 568
10.3.2 Не явное преобразование типов .......................................................................................... 570
10.3.3 Переменные GUD .................................................................................................................. 571
10.3.4 Идентификаторы осей по умолчанию (NO_AXIS) ............................................................... 573
10.3.5 Маркеры синхронного действия ($AC_MARKER[n]) ........................................................... 574
10.3.6 Параметры синхронных действий ($AC_PARAM[n]) ........................................................... 575
10.3.7 R-параметры ($R[n]) .............................................................................................................. 575
10.3.8 Чтение и запись машинных и установочных данных ЧПУ ................................................. 576
10.3.9 Переменные таймера ($AC_Timer[n]) .................................................................................. 578
10.3.10 Переменные FIFO ($AC_FIFO1[n] ... $AC_FIFO10[n]) ......................................................... 579
10.3.11 Информация по типам кадров в интерполяторе ($AC_BLOCKTYPE,
$AC_BLOCKTYPEINFO, $AC_SPLITBLOCK) ....................................................................... 581
10.4 Операции в синхронных действиях...................................................................................... 584
10.4.1 Обзор возможных операций в синхронных действиях ....................................................... 584
10.4.2 Вывод вспомогательных функций ........................................................................................ 586
10.4.3 Установка блокировки загрузки (RDISABLE) ....................................................................... 587
10.4.4 Отмена остановки предварительной обработки (STOPREOF) .......................................... 588
10.4.5 Стирание остатка пути (DELDTG) ........................................................................................ 589
10.4.6 Определение полиномов (FCTDEF) ..................................................................................... 591
10.4.7 Синхронная функция (SYNFCT) ........................................................................................... 594
10.4.8 Регулировка дистанции с ограниченной коррекцией ($AA_OFF_MODE) .......................... 597
10.4.9 Коррекция инструмента Online (FTOC) ................................................................................ 600
10.4.10 Коррекция длин инструмента Online ($AA_TOFF) ............................................................... 603
10.4.11 Движения позиционирования ............................................................................................... 605
10.4.12 Позиционирование оси (POS) ............................................................................................... 606
10.4.13 Позиция в заданной контрольной области (POSRANGE) .................................................. 608
10.4.14 Запуск/остановка оси (MOV) ................................................................................................. 609
10.4.15 Переход оси (RELEASE, GET) .............................................................................................. 610
10.4.16 Осевая подача (FA) ............................................................................................................... 614
10.4.17 Программные конечные выключатели ................................................................................. 614
10.4.18 Координация осей .................................................................................................................. 615
10.4.19 Установка фактического значения (PRESETON) ................................................................ 616
10.4.20 Отмена разрешения для вращения осевого контейнера (AXCTSWEC) ........................... 617
10.4.21 Движения шпинделя .............................................................................................................. 620
10.4.22 Буксировка (TRAILON, TRAILOF) ......................................................................................... 621
10.4.23 Соединение по главному значению (LEADON, LEADOF) ................................................... 623

Содержание
Расширенное программирование
14
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
10.4.24 Измерение (MEAWA, MEAC) ................................................................................................. 626
10.4.25 Инициализация переменных поля (SET, REP) .................................................................... 627
10.4.26 Установка/удаление меток ожидания (SETM, CLEARM) .................................................... 628
10.4.27 Реакции на ошибки (SETAL) ................................................................................................. 629
10.4.28 Наезд на жесткий упор (FXS, FXST, FXSW, FOCON, FOCOF) ........................................... 630
10.4.29 Определение угла касательной к траектории в синхронных действиях ........................... 632
10.4.30 Определение актуальной процентовки ................................................................................ 633
10.4.31 Анализ загруженности через требуемое время синхронных действий ............................. 634
10.5 Технологические циклы......................................................................................................... 636
10.5.1 Контекстная переменная ($P_TECCYCLE) .......................................................................... 639
10.5.2 Параметры, вызываемые по значению ................................................................................ 640
10.5.3 Инициализация параметров по умолчанию ......................................................................... 640
10.5.4 Управление обработкой технологических циклов (ICYCOF, ICYCON) .............................. 641
10.5.5 Каскадирование технологических циклов ............................................................................ 642
10.5.6 Технологические циклы в покадровых синхронных действиях .......................................... 642
10.5.7 Управляющие структуры (IF) ................................................................................................ 643
10.5.8 Операторы перехода (GOTO, GOTOF, GOTOB) ................................................................. 643
10.5.9 Блокировка, разрешение, сброс (LOCK, UNLOCK, RESET) ............................................... 644
10.6 Удаление синхронного действия (CANCEL) ........................................................................ 646
10.7 Поведение СЧПУ в определенных рабочих состояниях .................................................... 647
11 Качание ..................................................................................................................................................651
11.1 Асинхронное качание (OS, OSP1, OSP2, OST1, OST2, OSCTRL, OSNSC, OSE, OSB) ... 651
11.2 Управляемое через синхронные действия качание (OSCILL) ........................................... 657
12 Штамповка и вырубка ...........................................................................................................................665
12.1 Активация, деактивация........................................................................................................ 665
12.1.1 Включение или выключение штамповки и вырубки (SPOF, SON, PON, SONS, PONS,
PDELAYON, PDELAYOF, PUNCHACC) ................................................................................ 665
12.2 Автоматическая подготовка пути ......................................................................................... 670
12.2.1 Разделение пути для траекторных осей .............................................................................. 673
12.2.2 Разделение пути для отдельных осей ................................................................................. 675
13 Шлифование ..........................................................................................................................................677
13.1 Спец. для шлифования контроль инструмента в программе обработки детали (TMON,
TMOF) ..................................................................................................................................... 677
14 Другие функции .....................................................................................................................................679
14.1 Осевые функции (AXNAME, AX, SPI, AXTOSPI, ISAXIS, AXSTRING,
MODAXVAL) ......... 679
14.2 Переключаемые геометрические оси (GEOAX) .................................................................. 682
14.3 Осевой контейнер (AXCTSWE, AXCTSWED, AXCTSWEC) ................................................ 687
14.4 Ожидание действительной позиции оси (WAITENC).......................................................... 693
14.5 Проверка имеющейся языковой среды ЧПУ (STRINGIS)................................................... 695
14.6 Вызов функции ISVAR и чтение индекса массива машинных данных.............................. 699
14.7 Заучивание характеристик компенсации (QECLRNON, QECLRNOF) ............................... 701
14.8 Интерактивный вызов окон из программы обработки детали (MMC)................................ 703

Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
15
Содержание
14.9 Время выполнения программы / счетчик деталей.............................................................. 704
14.9.1 Время выполнения программы / счетчик деталей (обзор) ................................................. 704
14.9.2 Время выполнения программы ............................................................................................. 705
14.9.3 Счетчики деталей .................................................................................................................. 709
14.10 Вывод на внешнее устройство/файл (EXTOPEN, WRITE, EXTCLOSE)............................ 710
14.11 Ошибки (SETAL) .................................................................................................................... 719
14.12 Автономный расширенный останов и отвод привода (ESR).............................................. 721
14.12.1 Конфигурирование автономного останова привода (ESRS) .............................................. 721
14.12.2 Конфигурирование автономного отвода привода (ESRS) ................................................. 722
15 Собственные программы обработки резаньем ..................................................................................725
15.1 Функции поддержки для обработки резаньем..................................................................... 725
15.2 Создание таблицы контуров (CONTPRON) ......................................................................... 726
15.3 Создание кодированной таблицы контуров (CONTDCON) ................................................ 732
15.4 Определить точку пересечения между двумя элементами контура (INTERSEC)............ 736
15.5 Покадровая обработка элементов контура таблицы (EXECTAB)...................................... 738
15.6 Вычисление данных окружности (CALCDAT) ...................................................................... 739
15.7 Отключить подготовку контура (EXECUTE)......................................................................... 741
16 Внешнее программирование циклов ...................................................................................................743
16.1 Технологические циклы......................................................................................................... 743
16.1.1 Введение ................................................................................................................................ 743
16.1.2 Сверление, центрование - CYCLE81 ................................................................................... 745
16.1.3 Сверление, зенкование - CYCLE82 ...................................................................................... 746
16.1.4 Развертывание - CYCLE85 ................................................................................................... 747
16.1.5 Глубокое сверление - CYCLE83 ........................................................................................... 748
16.1.6 Растачивание - CYCLE86 ...................................................................................................... 750
16.1.7 Нарезание внутренней резьбы без компенсирующего патрона - CYCLE84 ..................... 751
16.1.8 Нарезание внутренней резьбы с компенсирующим патроном - CYCLE840 ..................... 754
16.1.9 Сверлильное резьбофрезерование - CYCLE78 .................................................................. 756
16.1.10 Любые позиции - CYCLE802 ................................................................................................. 758
16.1.11 Ряд отверстий - HOLES1 ....................................................................................................... 760
16.1.12 Решетка или рамка - CYCLE801 ...........................................................................................761
16.1.13 Окружность отверстий - HOLES2 ......................................................................................... 762
16.1.14 Плоское фрезерование - CYCLE61 ...................................................................................... 763
16.1.15 Фрезерование прямоугольного кармана - POCKET3 ......................................................... 765
16.1.16 Фрезерование кругового кармана - POCKET4 .................................................................... 768
16.1.17 Фрезерование прямоугольной цапфы - CYCLE76 .............................................................. 770
16.1.18 Фрезерование круговой цапфы - CYCLE77 ..................
....................................................... 772
16.1.19 Многогранник - CYCLE79 ...................................................................................................... 774
16.1.20 Продольный паз - SLOT1 ...................................................................................................... 776
16.1.21 Кольцевая канавка - SLOT2 .................................................................................................. 779
16.1.22 Фрезерование открытой канавки - CYCLE899 ..................................................................... 781
16.1.23 Продольный паз - LONGHOLE ..............................................................................................783
16.1.24 Резьбофрезерование - CYCLE70 ......................................................................................... 785
16.1.25 Цикл гравирования - CYCLE60 ............................................................................................. 787
16.1.26 Вызов контура - CYCLE62 ..................................................................................................... 790
16.1.27 Фрезерование траектории - CYCLE72 ................................................................................. 791

Содержание
Расширенное программирование
16
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
16.1.28 Предварительное сверление контурного кармана - CYCLE64 .......................................... 794
16.1.29 Фрезерование контурного кармана - CYCLE63 ................................................................... 796
16.1.30 Обработка резаньем - CYCLE951 ........................................................................................ 798
16.1.31 Выточка - CYCLE930 ............................................................................................................. 801
16.1.32 Формы канавок - CYCLE940 .................................................................................................. 804
16.1.33 Нарезание резьбы резцом - CYCLE99 ................................................................................. 807
16.1.34 Цепочка резьб - CYCLE98 ..................................................................................................... 810
16.1.35 Отрез - CYCLE92 ................................................................................................................... 813
16.1.36 Прорезание контура - CYCLE952 ......................................................................................... 815
16.1.37 Поворот - CYCLE800 ............................................................................................................. 819
16.1.38 High Speed Settings - CYCLE832 ........................................................................................... 822
16.1.39 Высокоскоростная обработка резаньем (ВСФ) - CYCLE_HSC ........................................... 823
17 Таблицы .................................................................................................................................................825
17.1 Операторы.............................................................................................................................. 825
17.2 Операторы: Доступность для SINUMERIK 828D ................................................................. 881
17.3 Текущий язык в HMI............................................................................................................... 903
A Приложение ...........................................................................................................................................905
A.1 Список сокращений ............................................................................................................... 905
A.2 Обзор документации.............................................................................................................. 910
Толковый словарь ..................................................................................................................................913

Расширенное программирование
Справочник по программированию 02/2011, 6FC5398-2BP40-1PA0
17
1
Гибкое программирование ЧПУ
1.1 Переменные
1.1.1 Общая информация по переменным
Благодаря использованию переменных, особенно в комбинации с функциями
вычисления и управляющими структурами, возможно очень гибкое оформление
программ обработки деталей и циклов. Для этого системой предлагается три
различных типа переменных:
• Системные переменные
Системные переменные это определенные в системе и предоставленные
пользователю переменные с постоянным значением. Они также считываются и
записываются системным ПО. Пример: Машинные данные
Значение системной переменной задано системой фиксировано, свойства - в макс.
возможной степени. Но свойства в ограниченном объеме могут настраиваться
пользователем через переопределение. См. "Переопределение системных
переменных, переменных пользователя и языковых команд ЧПУ (REDEF) [Страница
31]"
• Переменные пользователя
Переменные пользователя это переменные, значение которых не известно системе
и которые не обрабатываются системой. Значение устанавливается только
пользователем.
Переменные пользователя подразделяются на:
- Предопределенные переменные пользователя
Предопределенные переменные пользователя это уже определенные в системе
переменные, число которых только должно быть спараметрированно
пользователем через спец. машинные данные. Свойства этих переменной в
известной мере могут настраиваться пользователем. См. "Переопределение
системных переменных, переменных пользователя и языковых команд ЧПУ
(REDEF) [Страница 31]".
- Определенных пользователем переменных
Определенные пользователем переменные это определенные исключительно
пользователем переменные, создаваемые системой только для рабочего цикла.
Их число, тип данных, видимость и все другие свойства устанавливаются только
пользователем.
См. "Определение переменных пользователя (DEF) [Страница 25]"

Гибкое программирование ЧПУ
1.1 Переменные
Расширенное программирование
18 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
См. также
Системные переменные Системные переменные [Страница 18]
Предопределенные переменные пользователя: R-параметры (R) Предопределенные
переменные пользователя: R-параметры (R) [Страница 21]
Предопределенные переменные пользователя: Link-переменные Предопределенные
переменные пользователя: Link-переменные [Страница 23]
Атрибут: Инициализирующее значение Атрибут: Инициализирующее значение
[Страница 34]
Атрибут: предельные значения (LLI, ULI) Атрибут: предельные значения (LLI, ULI)
[Страница 37]
Атрибут: Физическая единица (PHU) Атрибут: Физическая единица (PHU) [Страница 39]
Атрибут: Права доступа (APR, APW, APRP, APWP, APRB, APWB) Атрибут: Права
доступа (APR, APW, APRP, APWP, APRB, APWB) [Страница 41]
Обзор определяемых и переопределяемых атрибутов Обзор определяемых и
переопределяемых атрибутов [Страница 46]
Определение и инициализация переменных поля (DEF, SET, REP) Определение и
инициализация переменных поля (DEF, SET, REP) [Страница 47]
Типы данных Типы данных [Страница 55]
1.1.2 Системные переменные
Системные переменные это предопределенные в системе переменные,
обеспечивающие в программах обработки деталей и циклах доступ к актуальному
параметрированию СЧПУ, а также состояниям станка, СЧПУ и процессов.
Переменные предварительной обработки
Переменными предварительной обработки обозначаются системные переменные,
которые считываются и записываются в контексте предварительной обработки, т.е. на
момент интерпретации кадра программы обработки детали, в котором системная
переменная запрограммирована. Переменными предварительной обработки не
создают остановки предварительной обработки.
Переменные главного хода
Переменными главного хода обозначаются системные переменные, которые
считываются и записываются в контексте главного хода, т.е. на момент исполнения
кадра программы обработки детали, в котором системная переменная
запрограммирована. Переменными главного хода являются:
• Системные переменные, которые могут программироваться в синхронных
действиях (чтение/запись)
• Системные переменные, которые могут программироваться в программе обработки
детали и вызывают остановку предварительной обработки (чтение/запись)
• Системные переменные, которые могут программироваться в программе обработки
детали и и получают значение при предварительной обработке, но записываются
только на главном ходе (синхронно с главным ходом: только запись)
Гибкое программирование ЧПУ
1.1 Переменные
Расширенное программирование
Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
19
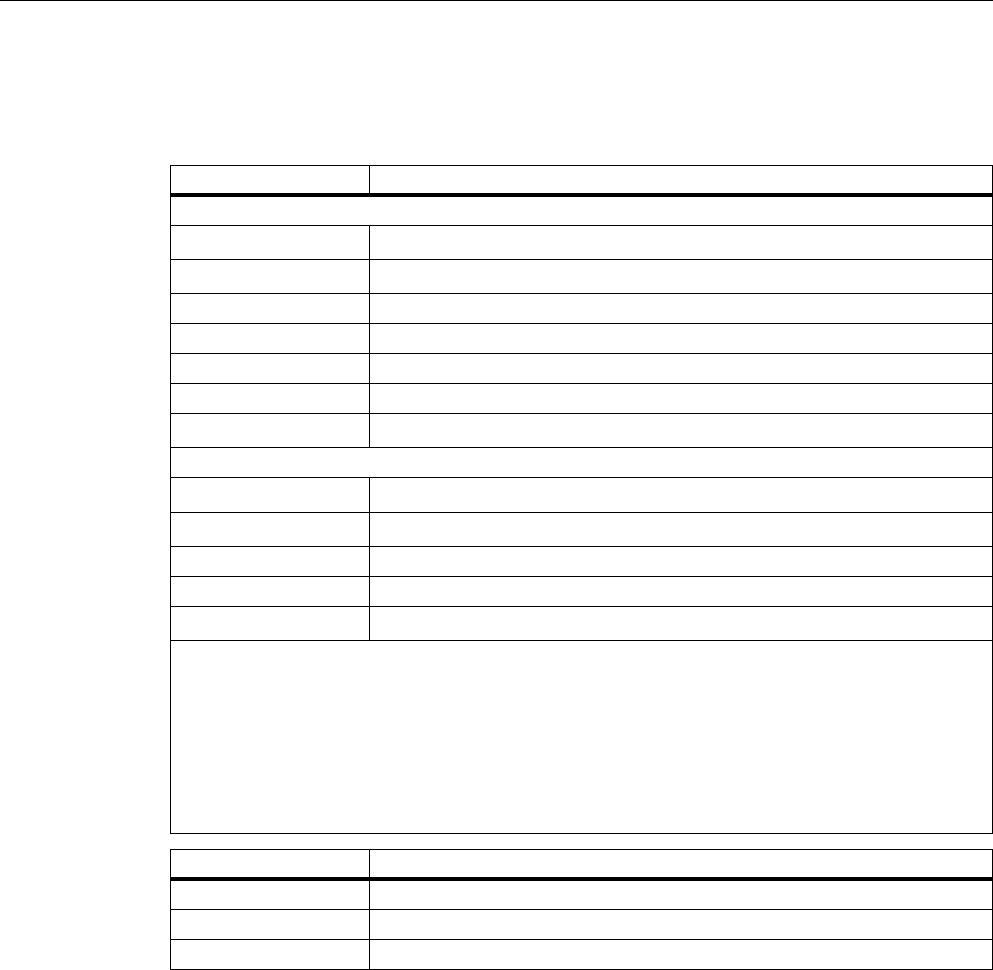
Систематика префиксов
Для особого обозначения системных переменных, перед именем обычно стоит
префикс, состоящий из символа $, одной или двух букв и символа подчеркивания:
Граничные условия
Исключение в систематике префиксов
Следующие системные переменные отличаются от в.н. систематики префиксов:
• $TC_...: 2-ая буква C ссылается не на спец. для канала, а на спец. для зажима
инструмента системные переменные (TC = Tool Carrier)
• $P_ ...: Спец. для канала системные переменные
$ + 1. Буква Значение: Тип данных
Системные переменные, считываемые / записываемые при предварительной обработке
$M
Машинные данные
1)
$S
Установочные данные, защищенные области
1)
$T Данные управления инструментом
$P Запрограммированные значения
$C Переменные оболочек циклов ISO
$O Опциональные данные
R
R-параметры (параметры для расчета)
2)
Системные переменные, считываемые / записываемые при главном ходе
$$M
Машинные данные
1)
$$S
Установочные данные
1)
$A Актуальные данные главного хода
$V Servo-данные
$R
R-параметры (параметры для расчета)
2)
1)
При использовании машинных и установочных данных в программе обработки детали / цикле
как переменной предварительной обработки, префикс записывается с символом $. При
использовании в синхронных действиях в качестве переменной главного хода префикс
записывается с двумя символами $.
2)
При использовании R-параметра в программе обработки детали / цикле как переменной
предварительной обработки, префикс не записывается, к примеру, R10. При использовании в
синхронном действии как переменной главного хода в качестве префикса записывается символ
$, к примеру, $R10.
2. Буква Значение: Видимость
N Глобальные переменные NCK (NCK)
C Спец. для канала переменные (Channel)
A Спец. для оси переменные (Axis)
Гибкое программирование ЧПУ
1.1 Переменные
Расширенное программирование
20 Справочник по программированию, 02/2011, 6FC5398-2BP40-1PA0
Использование машинных и установочных данных в синхронных действиях
При использовании машинных и установочных данных в синхронных действиях через
префикс можно определить, будут ли машинные или установочные данные
считываться/записываться синхронно с предварительной обработкой или главным
ходом.
Если данные при обработке не изменяются, то возможно считывание синхронно с
предварительной обработкой. Для этого префикс машинных или установочных данных
записывается с символом $:
Если данные при обработке изменяются, то считывание/запись должны выполняться
синхронно с главным ходом. Для этого префикс машинных или установочных данных
записывается с двумя символами $:
Литература
Перечень свойств всех системных переменных можно найти в:
Справочник по параметрированию "Системные переменные"
См. также
Общая информация по переменным Общая информация по переменным [Страница 17]
Программный код
ID=1 WHENEVER G710 $AA_IM[z] < $SA_OSCILL_REVERSE_POS2[Z]–6 DO $AA_OVR[X]=0
Программный код
ID=1 WHENEVER $AA_IM[z] < $$SA_OSCILL_REVERSE_POS2[Z]–6 DO $AA_OVR[X]=0
Примечание
Запись машинных данных
При записи машинных или установочных данных следить за тем, чтобы активный
уровень доступа при выполнении программы обработки детали / цикла разрешал бы
доступ по записи и чтобы активность данных была бы "IMMEDIATE".