Розенберг Л.Д. Физика и техника мощного ультразвука. Книга 1. Источники мощного ультразвука OCR
Подождите немного. Документ загружается.

ТОЙ,
типом
и
размерами
излучателя:
ZBX
=
ZИ
=
R
и
+
iХ
и
,
гдо
R
и
и
Х
И
-
активная
и
реактивная
составляющие
сопротивления
излу.
чения
без
учета
потерь
в
среде.
При
учете
потерь
в
жидкой
среде
эти
со-
ставляющие
будут:
~
R
и
.
п
=
R
и
+
Т
Хи,
Х
и
.
п
=
х
и
+
~
R
и
;
(f)
здесь
k =
оо/с;
~
-
показатель
затухания
в
среде;
(f)
-
круговая
частота;
с
-
скорость
расqространения
колебаний
в
среде.
iЗначения
Rи,Х
и
или
R
и
.
п
.,
Х
и
.
п
.
могут
быть
рассчитаны
или
измерены
[13].
в
случае
акустически
ограниченной
среды
с
постоянными
физическими
параметрами,
находящейся
в
объеме
с
постояниыми
габаритами,
величина
входного
сопротивления
зависит
от
габаритов,
так
как
реакция
отражен
ных
волн
на
и:шучатель,
зависящая
от
их
амплитуды
и
фазы,
определяет
значение
ZBX'
В
зависимости
от
степени
поглощения
волн
при
отражении
от
границ
объема,
занимаемого
средой,
и
в
самой
среде, а
также
от
числа
отражений
и их
фазовых
сдвигов
реакция
на
излучатель
может
быть
раз
личной.
Так
может
оказаться,
что,
вследствие
относительно
малой
(по
сравнению
с
поверхностью
стенок)
площади
излучателя
и
значительного
поглощения
всех
отраженных
волн,
реакция
их
будет
настолько
мала,
что
.
входное
сопротивление
практически
может
быть
определено
как для
аку·
стически
неограниченной
среды.
Эффективность
ввода
колебаний
вакустически
неограниченные
и
огра
...
ниченные
среды
может
быть
обеспечена
путем
согласования
величины
ZBX
с
источником
колебаний
(преобразователем)
и
с
волноводной
системой.
Для
сред
с
переменными
параметрами
могут
изменяться
величины
~
и
С.
Например,
при
обработке
ультразвуком
расплавов
в
процессе
их
кри
сталлизации,
вследствие
изменения
фазового
состояния
расплава
и
его
температуры,
изменяются
величины
поглощения
и
скорости
распростране
ния.
Таким
образом,
в
процессе
обработки
непрерывно
изменяются
ZBX
и
его
составляющие.
В
качестве
другого
примера
приведем
технологиче
скую
ванну,
в
которой
ведется
процесс
ультразвукового
эмульгирования.
По
мере
развития
прvцесса
и
перехода
большей
части
объемов
компонен
тов
в
эмульсию,
состав,
а
следовательно,
и
физические
параметры
среды
изменяются.
Следует,
однако,
учитывать,
что
изменение
физических
па
раметров
среды
в
основном
влияет
на
активную
составляющую
входного
сопротивления,
а
следовательно,
расстройка
системы
происходит
в
мень
шей
мере,
чем
нарушение
величины
оптимального
значения
нагрузочного
сопротивления.
Практически
нарушение
этой
величины
для большинства
известных
нам
технологических
жидких
сред
не
очень
существенно.
Воль
ше
сказывается
изменение
габаритов
объема,
в
котором
помещена
среда.
При
этом
наибольшее
влияние
на
режим
оказывает
изменение
реактивной
составляющей,
обусловливающей
расстройку
всей
системы.
Приведем
два
примера.
При
обработке
ультразвуком
металла
в
процессе
его
кристал·
лизации,
в
дуговых
вакуумных
печах
с
расходуемым
электродом
слиток
непрерывно
растет,
т.
е.
изменяется
его
высота,
а
следовательно,
и
величи
на
реактивной
составляющей
входного
сопротивления.
Аналогичное
по
ложение
может
иметь
место
при
наложении
ультразвуковых
колебаний
на
заготовку,
подвергающуюся
пластической
деформации.
С
изменением
конфигурации
и
размеров
заготовки
изменяется
реактивная
составляю
щая
сопротивления
нагрузки,
т.
е.
нарушаются
резонансные
условия.
Таким
образом,
при
обработке
ультразвуковыми
колебаниями
объемов
с
переменными
габаритами
возникает
задача
эффективного
ввода
энергии
колебаний
в
условиях
переменного
значения
входного
сопротивления
на
грузки.
14*
2:1:1.
Рассмотрим среды
с
точки
зрения:их
физических
характеристик.
Иног
да
для
воздействия
на
жидкие
с{>еды
необходимо
применять
излучатели
с
поверхностью
излучения
SИ
~
SП,
где
SП
-
излучающая
поверхность
.
преобразователя.
Такая
необходимость
может
возникнуть
для
обеспече
ния
условий
согласования,
заданной
производительности
или
направлен
ности
излучателя.
Условие
согласования
связано
с
входным
сопротивле
нием
среды;
при
этом
одним
из
методов
согласования,
как
известно,
яв
ляется
выбор
величины
SЦ.
Повышение
производительности
(например,
при
ультразвуковой
очист~е)
требует
(при
некоторой
предельной
интен
сивности
колебаний,
достаточной
для
эффекта
очистки)
определенных
зна
чений
SИ
.
Рост
значения
SИ
увеличивает
направленность.
Величина
из
лучающей
поверхности
преобразователя
SП,
определяемая
его
мощн;остью
'8
резонансной
частотой,
обычно
такова,
что
SИ
jSп
> 1.
При
достаточно
болыпой
величине
этого
отношения
переход
от
меньшей
поверхности
к
большей
связан
с
конструктивными
трудностями.
Решить
эту
задачу,
применив
излучатели
в
виде
диафрагм,
нерационально,
несмотря
на
то,
что
такие
излучатели
широко
используются.
Действительно,
собственная
частота
изгибных
колебаний
таких
излучателей
при
требуемых
прак
тикой
их
размерах
-
ниже
рабочей
частоты,
т.
е.
эти
излучатели
работа
ют
не
в
резонансе.
Характер
их
колебаний
-
сложный;
в
них
возбужда
ются
изгибные
колебания,
что
приводит
к
понижению
эффективности
излу
чения
и
к
увеличению
потерь,
особенно
в
контуре
закрепления
диафрагмы.
В
результате
энергия
колебаний,
подведенных
к
такому
излучателю,
ис
пользуется
плохо;
возникает
также
проблема
прочного
его
соединения
с
волноводом,
так
как
из-за
ненастроенной
диафрагмы
и
наличия
изгибных
колебаний,
в
месте
соединения
возникают
значительные
отрывающие
уси
лия.
Таким
образом,
вторая
из
подлежащих
рассмотрению
основных
за
дач
-
это
создание
эффективных
излучателей
в
жидкие
среды
больших
(в
указанном
выше
понимании)
размеров.
R
этому
следует
добавить,
что
эффективный
излучатель
должен
обладать
значительной
равномерностью
излучения
по
всей
поверхности.
Воздействие
на
твердые
среды
выдвигает
главное
требование
хорошего
акустического
контакта
излучателя
(рабо
чего
инструмента)
с
обрабатываемым
объектом.
Например,
при
воздейст
вии
ультразвука
на
процесс
термической
обработки
сплавов
наибольшей
трудностью
является
осуществление
акустической
связи
и
введение
коле
баний
в
объекты
сложной
формы,
в
которых
может
возбуждаться
множест
во
различных
нормальных
волн.
Таким
образом,
третья
существенная
задача
-
это
создание
способа
введения
упругих
колебаний
в
твердые
среды
сложной
формы.
При
воздействии
на
твердые
и
жидкие
среды
воз
никает
еще
одна
задача:
акустическая
изоляция
(развязка)
обрабатывае
мой
среды и
волноводно-излучающей
системы
от
пассивных
элементов
технологических
конструкций.
Акустическая
развязка
обычно
получается
одним
из
следующих
спо
собов
[1, 2]:
1)
присоединение
волноводно-излучающей
системы
к
пассивным
эле
ментам
в
узловых
плоскостях
или
через
посредство
четвертьволнового
изолятора;
2)
применение
резонансных
диафрагм
с
узловыми
окружностями
по
контуру
крепления;
3)
применение
акустически
гибких
ненастроенных
соединительных
элементов;
4)
применение
скользящих
уплотнений.
Ни
один
из
этих
способов,
однако,
не
обеспечивает
полной
изоляции.
у
зловые
соединения
могли
бы
обеспечить
полностью
развязку,
если
бы
в
волноводно-излучающей
системе
была
чисто
стоячая
волна,
при
которой
в
узловой
плоскости
системы
амплитуда
колебательного
смещения
равна
нулю.
Однако
передача
энергии
в
объект
обработки
неизбежно
связана
212
с
потоком
энергии;
в
волноводной
системе
возникает
бегущая
волна
и
В'
узловой
плоскости
системы
амплитуда
смещения
оказывается
отличной
от
нуля.
В
результате
присоединение
пассивных
элементов
в
узловой
плоско·
сти
вызывает
частичное
рассеяние
энергии
и
нарушение
колебательного
режима
системы.
Кроме
того,
если
входное
сопротивление
нагрузки
или
ч~стота
возбуждения
изменяют
свои
значения,
положение
узловой
плос
кости
смещается,
что
нарушает
акустическую
развязку
и
соответственно
уменьшает
амплитуду
колебаний.
Четвертьволновой
изолятор
может
быть
присоединен
в
любой
'плоскости
колебательной
системы,
однако.
чтобы
колебания,
в
нем
возникающие,
не
создавали
потерь,
материал
изолятора
должен
обладать
минимальными
потерями.
При
изменении
рабочей
частоты
четвертьволновой
изолятор
расстраивается
и
акустическая
развязка
ухудшается.
Аналогичное
положение
имеет
место
при
применении
резо
нансных
диафрагм.
Соединительные
элементы
в
виде
акустически
гибких
колец
«<воротников»)
не
критичны
к
изменению
частоты
и
нагрузки,
однако
применение
их
ограничено,
так
как
они
недостаточно
прочны.
Скользящие
уплотнения
(применяющиеся,
например,
в
вакуумной
технике
уплотне
ния
Вильсона)
или прокладки
из
фторопласта
можно
использовать
лишь
в
тех
случаях,
когда
допускается
нежесткое
присоединение
к
крепящим
конструкциям.
В
ряде
случаев
(например,
при
введении
колебаний
в
объ
ект,
помещенный
в
вакууме)
такие
уплотнения
себя
оправдывают.
Из
изложенного
следует,
что
для
случаев,
когда
входное
сопротивление
нагрузки
изменяется,
достаточно
удовлетворительных
способов
акусти
ческих
развязок
не
существует.
Создание
их
представляет
четвертую
из
подлежащих
рассмотрению
задач.
Введение
колебаний
в
дисперсные
среды
не
вызывает
каких-либо
осо
(\ых
проблем
по
сравнению
с
теми,
которые связаны
с
обработкой
жидких
сред.
Следует
только
иметь
в
виду,
что
поскольку
поглощение
колебатель
ной
энергии
в
дисперсных
средах
существенно
больше,
чем
в
жидких,
отражения
от
границ
объема
среды
оказываются
меньшими,
и поэтому
дисперсные
среды,
заключенные
в
конечных
объемах,
можно
рассматри~
вать
как
акустически
неограниченные.
Рассмотрим
теперь
те
задачи,
которые связаны
с
условиями
воздейст
вия
агрессивных
сред
на
излучатель.
При
химически
агрессивных
средах
попытки
создать
стойкий
излучатель
до
сих
пор
сводились
К
отысканию
такого
материала
для
излучателя,
который
быне
разрушался
в
этих
средах,:
или
соответствующих
защитных
пленок
для
покрытия
его
поверхности.
Кроме
стойкости
к
разрушению
такой
материал
должен
обладать
еще
необходимыми
акустическими
свойствами.
В
настоящее
время
эта
задача
решена
лишь
частично
применительно
к
некоторым
химическим
средам.
Однако
ни
один
из
известных
материалов,
предназначенных
для
изготов
ления
таких
излучателей,
не
удовлетворяет
полностью
всем
требованиям.
Пленочные
покрытия тоже
пока
нельзя
считать
удовлетворительными.
.
Работа
излучателя
на
температурно-агрессивные
среды
(высокотемпе~
ратурные
расплавы)
приводит
к
ряду
разрушающих
излучатель
эффектов
(расплавление,
растворение,
эрозия),
интенсифицируемых
и
создавае""
мых
ультразвуковым
полем.
При
высоких
температурах
акустические
качества
материала
излу
чателя
снижаются.
Имеющиеся
в
настоящее
время
излучатели,
работаю
щие
на
расплав,
представляют
собой
звено
волноводной
системы
с
интен
сивным
теплоотводом,
находящееся
в
контакте
с
расплавом
ограниченное
время
(например,
при
обработке
расплава
в
процессе
его
кристаллиза~
ции).
При
таком
режиме
обработки
излучатель
не
успевает
подвергнуться
опасной
степени
разрушения.
В
других
случаях
(например,
при
ультра:.:.
звуковой
дегазации)
излучатель
находится
в
постоянном
контакте
с
жид;..
ким
расплавом:
До
настоящего
времени
еще
не
создан
излучатель,
:к
о
то
...
рый
бы
не
разрушался
при
работе
в
рассмотренных
выше
условиях.
21.а:
Глава
2
СОГ.JIАСОВАНИЕ
§ 1:.
У
С.J.Iовия
С_ОГ.J.Iасования
и
ОПТИИ8.J.1ьное
СОПРОТИВ.J.Iевие
наГРУ3RИ
Оптимальным
СОПрО'l'ивлением
нагрузки
R
опт
,
с
которой
связаны
пре
образователь
или
волноводная
система,
называется
такое
значение
этой
нагрузки,
при
котором
обеспечиваются
заданные
колебательный
режим
системы
и
условия
отбора
энергии
от
ее
источника.
Реальная
нагрузка,
представляемая
технологическим
объектом,
в
общем
случае
не
равна
опти
мальной.
Она
зависит
от
физических
параметров
обрабатываемого
объек
та
и
от
заданных
условий
излучения
энергии,
т.
е.
от
данных
излучателя
(рабочего
инструмента).
Таким
образом,
возникает
необходимость
в
согла
совании
реальной
нагрузки
с
преобразователем
или
с
волноводной
систе
мой.
При
этом
решаются
две
задачи:
а)
компенсация
реактивной
составляющей
Х
ВХ
входного
сопротив
ления
нагрузки;
б)
приведение
величины
активной
составляющей
R
Bx
к
требуемому
оп
тимальному
значению.
Первая
задача
решается
настройкой
в
резонанс
ВuЛНОВОДНОЙ
системы
с
учетом
величины
Х
вх
,
а
вторая
-
применением
трансформирующих
(согласующих)
устройств.
Обеспечение
заданного
колебательного
режима
волноводной
системы
связано
с
определенным
значением
коэффициента
бегущей
волны
где
шо
-
волновое
сопротивление
волновода.
В
зависимости
от
этой
вели
чины
колебательный
режим
может
быть
более
или
менее
близок
к
одному
из
крайних
режимов-стоячей
или
бегущей
волны.
Первому
из
них
соответ
ствует
одно
из
условий:
k
б
=
О
или
k
б
-==
00,
а
второму
k
б
= 1.
В
действитель
ности
идеальный
режим
стоячей
волны
не
реализуется,
так
как
при
этом
энергия
в
нагрузку
не
излучается.
Поэтому
можно
говорить
о
некотором
приближении
к
этому
режиму.
Можно
считать,
что
режим
«стоячей»
вол
ны
будет
обеспечен
при
коэффициенте
отражения
k
oTp
,
равном
+ 0,5 [1],
причем
Если
R
п
>
Шо,
то
на
входе
нагрузки
имеет место
режим
«колебательного
давлению),
а в
случае
R
H
<
ШО
-
режим
«колебательной
скорости»
[11].
Эти
режимы
соответственно
характеризуются
тем,
что
в
первом
из
них
амплитуда
колебательного
давления
больше,
чем
в
режиме
бегущей
вол
ны,
а
во
втором
-
амплитуда
колебательной
скорости
больше,
чем
в
ре
жиие
бегущей
волны.
При
этом
предполагается,
что
передаваемая
по
волноводУ
колебательная
мощность
во
всех
указанных
случаях
будет
одинаковая.
Выбор
того
или
другого
режима
определяется
требованиями
ультразвуковой
технологии,
с
учетом
к.п.д.
волновода.
При
заданной
ве
личине
затухания
материала
волновода
потери
в
нем
будут
тем
меньше,
чем
больше
режим
его
работы
приближается
к
режиму
бегущей
волны,
по
этому
режим
«стоячей»
волны
можно
применять
при
волноводах
с
малыми
потерями.
Переход
к
режиму
бегущей
волны
в
случае
R
п
=1=
шо
можно
осу
ществить
при
помощи
согласующих
устройств,
рассматриваемых
нами
далее.
Для
определения
К.П.д.
волновода
Рвых
т)в
=-Г-'
ВХ
(где
Рвых
-
мощность
на
выходе
волновода,
т. е.
на
входе
нагрузки;
Р
вх
-
мощность
на
входе
волновода)
можно
воспользоваться
приведенными
ниже
выражениями.
Для
однородного
волновода:
1
Т)В
=
Т)О
= 1 ( 1 )
ch
2~1
+"""2
k
б
+
~
sh
2~1
(2)
здесь
l -
длина
волновода;
~
-
показатель
затухания
для
материала,
из
которого
изготовлен
волновод
на
рабочей
частоте.
Для
коротких
систем
и
'систем
с
малыми
потерями:
1
(3)
110;::;::::
( 1 )
1 +
kб+~
~l
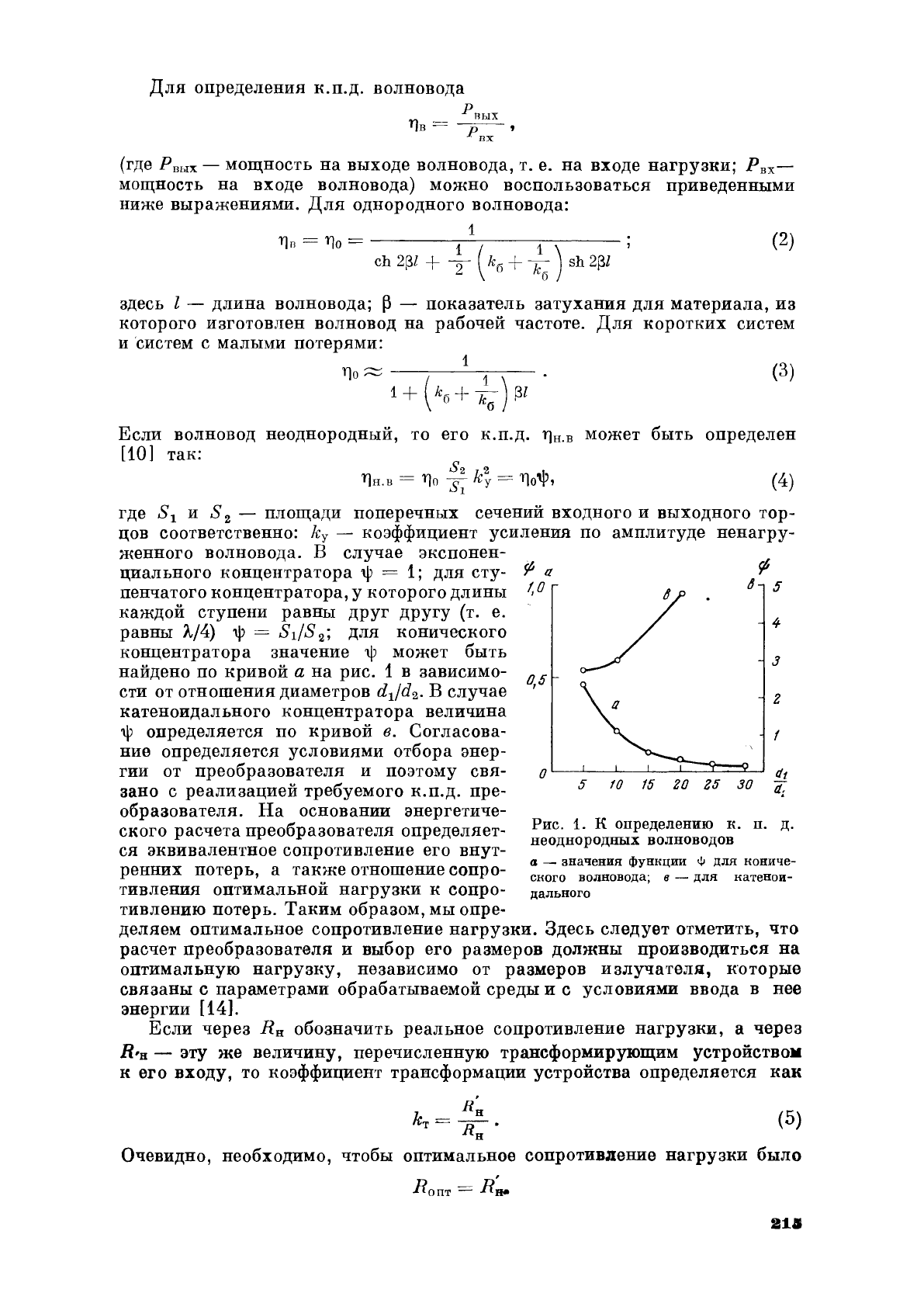
Если
волновод
неоднородный,
то
его
К.П.д.
Т)н.в
может
быть
определен
[10]
так:
S2
k
2
.1,
Т)н.в
=
Т)О
SI
У
=
110't',
(4)
где
S 1
и
S 2 -
площади
поперечных
сечений
входного
и
выходного
тор
цов
соответственно:
k
y
-
коэффициент
усилеmm
по
амплитуде
ненагру
женного
волновода.
В
случае
экспонен-
циального
концентратора
'Ф
= 1;
для
сту-
~
q
пенчатого
концентратора,
у
которого
длины
1,0
каждой
ступени
равны
друг
другу
(т.
е.
равны
л/4)
'Ф
=
SI/S
2;
для
конического
концентратора
значение
'Ф
может
быть
найдено
по
кривой
а
на
рис.
1
в
зависимо-
сти
от
отношения
диаметров
d
1
/d
2
•
В
случае
0,5
катеноидального
концентратора
величина
'Ф
определяется
по
кривой
в.
Согласова-
/
. ,
3
г
f
О
L.--L_L--L_.L~=::LJ
I/t
5
10
15
го
25
30
11:
ние
определяется
условиями
отбора
энер
гии
от
преобразователя
и
поэтому
свя
зано
с
реализацией
требуемого
К.П.д.
пре
образователя.
На
основании
энергетиче
ского
расчета
преобразователя
определяет-
Рис.
1.
К
определению
к. п.
д.
HeOДHOpo~x
ВОЛНОВОДОВ
ся
эквивалентное
сопротивление
его
внут-
(J
-
значения
фУНКЦИИ
Ф
дли
кониqе
рениих
потерь,
а
также
отношение
сопро-
ского
волновода;
8 _
дли
катеНои-
тивления
оптимальной
нагрузки
к
сопро-
дального
тивлению
потерь.
Таким
образом,
мы
опре-
деляем
оптимальное
сопротивление
нагрузки.
Здесь
следует
отметить,
что
расчет
преобразователя
и
выбор
его
размеров
должны
производиться
на
оптимальную
нагрузку,
независимо
от
размеров
излучателя,
К'оторые
связаны
с
параметрамп
обрабатываемой
среды
и
с
условиями
ввода
в
нее
энергии
[14].
Если
через
R
H
обозначить
реальное
сопротивление
нагрузки,
а
через
В'В
-
эту
же
величину,
перечисленную
трансформирующим
УСТРОЙСТВОМ
к
его
входу,
то
коэффициент
трансформации
устройства определяется
как
R~
5
k
t
=-.
()
R
H
Очевидно,
необходимо,
чтобы
оптимальное
сопротиваение
нагрузки
было
R
опт
=
R;"
21.8
§
=.
Опреде.JIевие
pea.JILB0I10
СОПРОТИв.llевия
ваl1руаки
и
ИОЩВОСТ
и
иа.JIучевия
Реальное
сопротивление
нагрузки,
представленной
твердой
или
жид
кой
средой,
не
всегда
может
быть
определено
расчетным
путем.
В
частно
сти,
входное
сопротивление
жидкой
среды
зависит
от
параметров
излу
чателя
и
физических
постоянных
среды
(скорости
звука
и
затухания)
сложным
образом.
Кроме
того,
эти
постоянные,
как
правило,
неизвест
ны,
особенно
в
режиме
кавитации.
Поэтому
определение
величины
R
H
следует
производить
опытным
путем.
Л5_
4-
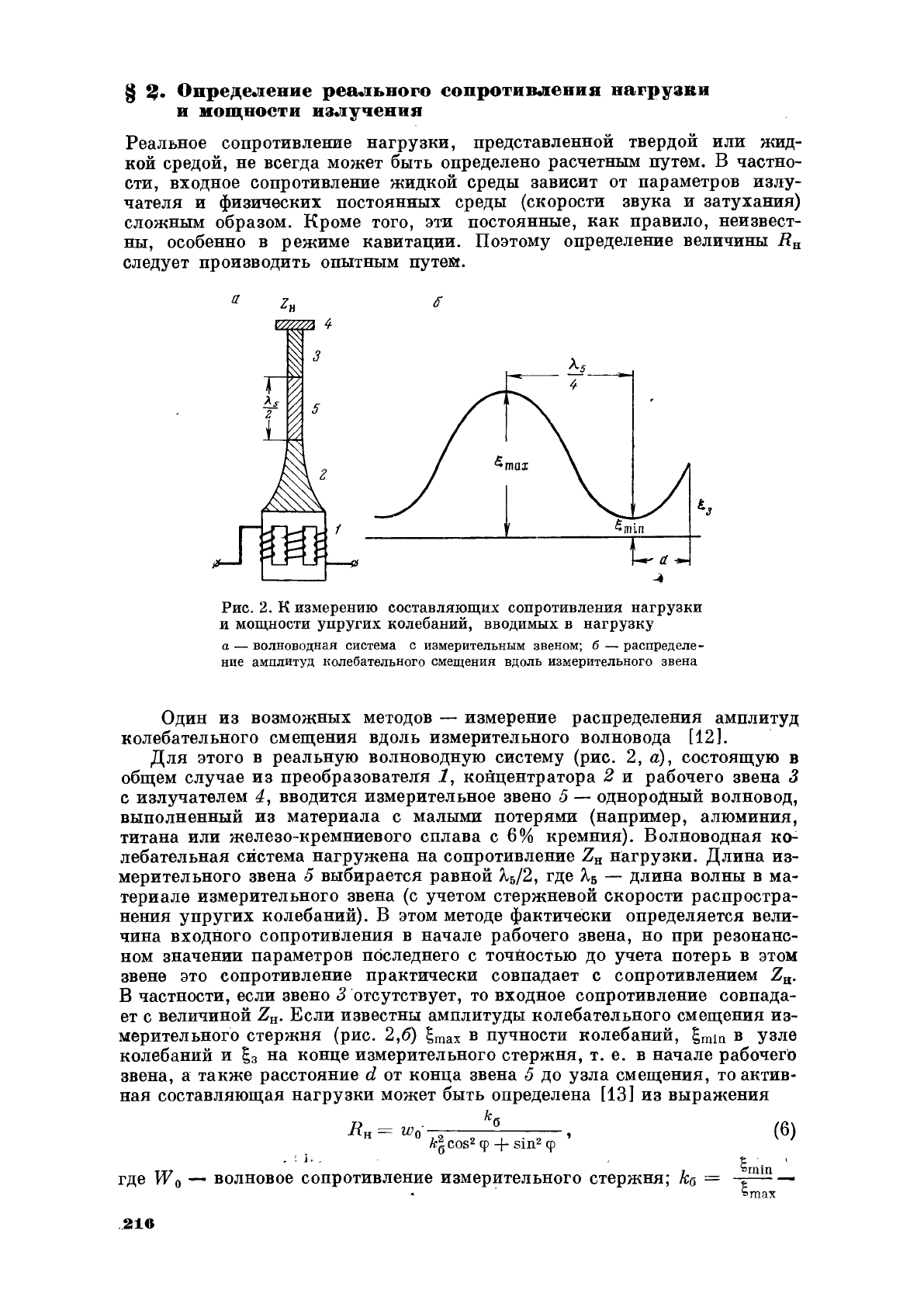
Рис.
2.
К
измерению составляющих
сопротивления
наГРУЗRИ
и мощности
упругих
Rолебаний,
вводимых
в
наГРУЗRУ
а
-
волноводная
система
с
измерительным
звеном;
б
-
распределе
ние
амплитуд
l\олебательного
смещения
вдоль
измерительного
звена
Один
из
возможных
методов
-
измерение
распределения
амплитуд
колебательного
смещения
вдоль
измерительного
волновода
[12]. .
Для
этого
в
реальную
волноводную
систему
(рис.
2,
а),
состоящую
в
общем
случае
из
преобразоватеJТЯ
1,
концентратора
2
и
рабочего
звена
3
с
излучателем
4,
вводится
измерительное
звено
5 -
однородный
волновод,
выполненный
из
материала
с
малыми
потерями
(например,
алюминия,
титана
или
железо-кремниевого
сплава
с
6%
кремния).
Волноводная
ко.:.
лебательная
система
нагружена
на
сопротивление
ZH
нагрузки.
Длина
из
мерительного
звена
5
выбирается
равной
Л5/2,
где
Л5
-
длина
волны
в
ма
териале
измерительного
звена
(с
учетом
стержневой
скорости
распростра
нения
упругих
колебаний).
В
этом
методе
фактически
определяется
вели
чина
входного
сопротивления
в
начале
рабочего
звена,
но
при
резонанс
ном
значении
параметров
последнего
с
точностью
до
учета
потерь
в
этом
звене
это
сопротивление
практически
совпадает
с
сопротивлением
Zп.
В
частности,
если
звено
3
'отсутствует,
то
входное
сопротивление
совпада
ет
с
величиной
ZH'
Если
известны
амплитуды
колебательного
смещения
из
мерительного
стержня
(рис.
2,6)
~тax
в
пучности
колебаний,
~min
В
узле
колебаний
и
~з
на
конце
измерительного
стержня,
т.
е.
в
начале
рабочего
звена, а
также
расстояние
d
от
конца
звена
5
до
узла
смещения,
то
актив
ная
составляющая
нагрузки
может
быть
определена
[13]
из
выражения
,
k
б
R
H
=
ШО
,
(6)
k~
cos
2
<р
+
sin
2
<р
где
W
о
-
волнов~е:
~~противление
измерительного
стержня;
k
б
=
~min
~
~тax
,,21.6
.коэффициент
бегущей
волны,
а
q>
=
~~
d.
Реактивная
составляющая
на
грузки
может
быть
определена
из
формулы
Х
(1
-
k~)
cos
<р
sin
<р
и
==
Wo •
!-~
cos
2
<р
+
sin
2
<р
(7)
Активная
мощность,
вводимая
в
нагрузку,
вычисляется
из
соотношения
(8)
Не
следует
забывать,
что
в
величину
Р
н
,
измеренную
таким
образом,
вхо
дят
также
потери
и
в
самом
излучателе.
Однако
в
большинстве
практиче
ских
случаев
такого
измерения
достаточно
для
оценки
мощности,
перехо
дящей
в
нагрузку.
Измерение
амплитуд
смещения
в
различных
точках
измерительного
звена
осуществляется
следующим
образом.
R
измерительному
звену
при
жимается
покрытая
бархатом
пластина,
в
средней
части
которой
вдоль
вол
новода
закреплена
полоска
тонкой
наждачной
бумаги.
Во
время
измерения
плаСТИНRа
быстро
смещается
в
направлении,
перпеНДикулярном
к
оси
волновода.
В
результате
сложения
поступательного
движения
пластинки
и
колебательного
движения
волновода
на
предварительно
полированной
поверхности
последнего
зернами
наждака
процарапываются
многочис
ленные
синусоидальные
кривые,
амплитуда
которых
равна
амплитуде
ко
лебательного
смещения
в
соответствующем
месте
волновода.
Измерение
амплитуд
(с
учето.м
толщины
линии
кривых)
производится под
микроско
пом
после
выключения
установки.
Средняя
погрешность
в
определении
вводимой
мощности
порядка
400-800
вт
не
превосходит
8% [15].
Описан
ный
метод
позволил,
например,
определить
мощность,
вводимую
в
расплав
ленные
металлы
[16].
Минимальные
значения
~()щности,
измеренные
этим
методом,
были
около
40
вт.
§
8.
Трансформирующие
(СОГaJIасующие)
устройства
Трансформирующие
устройства
-
это
системы
волноводов
или
отдель
ные
звенья
неоднородных
волноводов,
предназначенные
для
трансформа
ции
величины
сопротивления
нагрузки
Zи,
связанной
с
выходным
концом
волновода,
в
другую
вел'ичину
этого
сопротивления,
в
начале
волновода,
т.
е.
Z~
= k
T
Zи.
Обычно
реактивная
составляющая
компенсируется
на
стройкой
и
трансформируется
только
активная
составляющая,
т. е.
R~
=
kTR
H
•
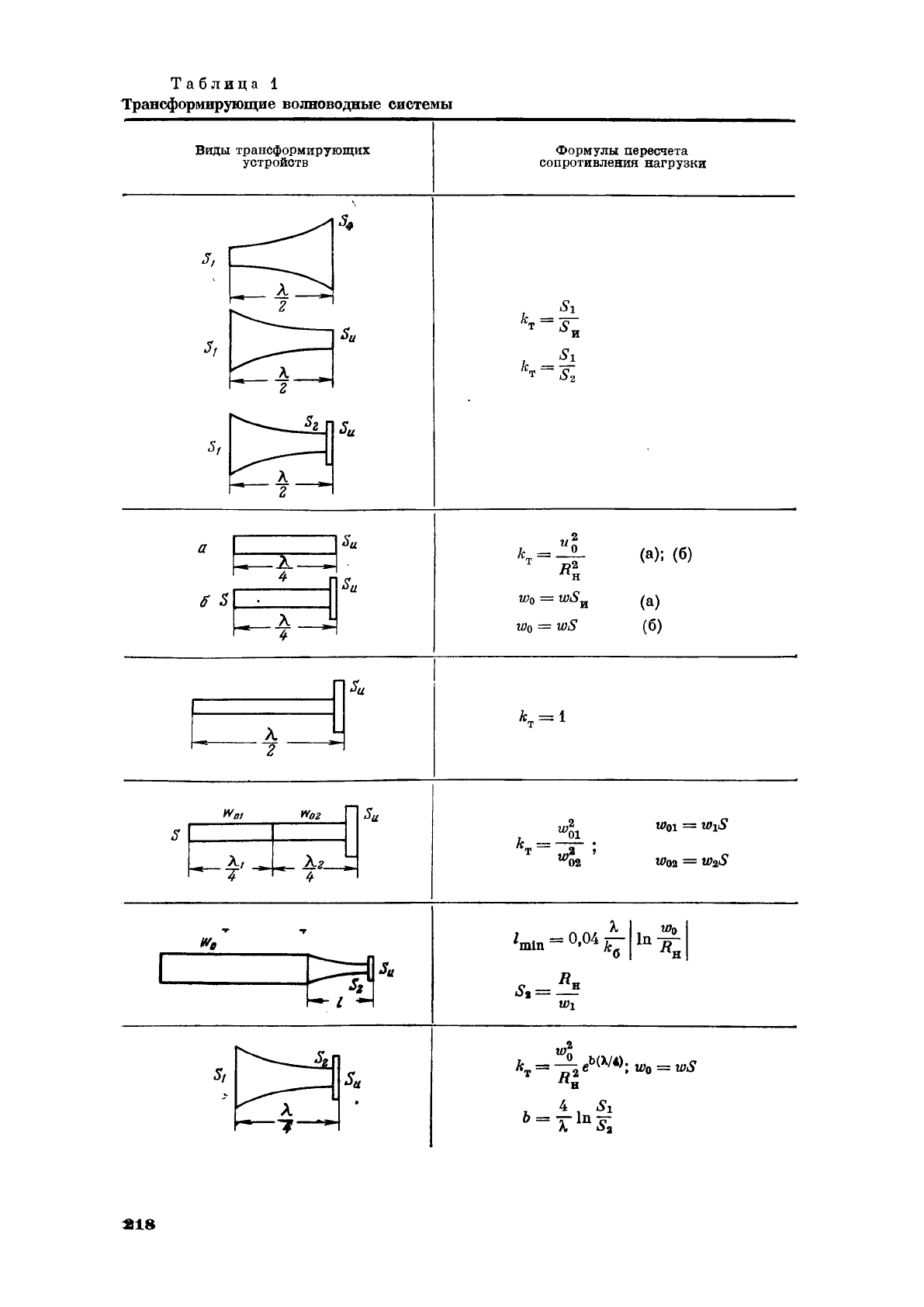
В
'табл.
1
'приведены
некоторые
виды
трансформирующих
устройств
и
формулы
для
пересчета
активной
реальной
нагрузки
R
и
в
R~.
Во
всех при
веденных
вариантах
неОДНОРQДНЫЙ
волновод
-
экспоненциальный.
Вхо
дящий
в
формулу
в
последней
графе
табл.
1
коэффициент
бегущей
волны
k
б
должен
быть
задан из
условия
обеспечения
требуемой
степени
прибли
жения
к
режиму
бегущей
волны.
J
Согласование
с
нагрузкой,
представленной
жидкой
средой,
можно
в
небольших
пределах
осуществить
просто
выбором
величины
излучающей
поверхности
SИ,
Действительно,
с
увел~чением
излучающей
поверхности
растет
сопротивление
излучения,
т.
е.
сопротивление
нагрузки.
Таким
образом,
можно
приблизить
реальное
сопротивление к
необходимой
ве
личине.
Однако
при
этом
способе
величина
SИ
может
не
удовлетворять
217
Таблица
1
Трансформирующие
ВОJlИоводвые
системы
S
I
218
Виды
трансформирующих
устройств
\
ц
1.
Л
г
W
O
!
Woz
г-
Sa
г--~!
----
}2~
...
т
/11.
~л.
S,
l
s:~s.
л
.
~
Формулы
пересчета
сопротивлевия
пагрузки
1(2
k
=_0_
т
R
2
П
Wo
=w8
и
wo=w8
k
=1
т
2
W
01
k
--.
т
-
w2
,
02
(а);
(б)
(а)
(б)
W01 = w
1
8
W02
= w,,8
Л
I
Wo
I
lmin = 0,04
k
б
ln
R
п
R
п
81=-
Wl
w
2
k =
--;
е
Ь
("Л/6>;
Wo
=
w8
т
R
п
4
81
Ь
=
х"
ln
82
'заданным
условиям
излучения.
Повышением
мощности
колебаний,
подво
димых
к
излучателю,
можно
этот
недостаток
несколько
компенсировать.
'Такое
согласование
может
быть
рекомендовано
в
том
случае,
когда
основ
'Ной
его
целью
является
приближение
к
режиму
бегущей
волны.
Согласова
'Ние
выбором
величины
SИ приведено
в
третьей
графе
табл.
1.
При
выборе
.для
целей
согласования
величины
SИ
необходимо
учитывать
условия,
огра
вичивающие
размеры
излучателя
(см.
гл.
4).
§
~.
Трансформация
реактивных
нагрузок
Как
было
указано
выше,
реактивные
составляющие
комплексных
нагру
зок
можно
компенсировать.
Это
можно
сделать
.nишь
при
помощи
допол
нительных
реактивных
нагрузок
соответствующей
величины
и
обратного
знака.
Так
как
нагрузку
нужной
величины
не
всегда
возможно
реализо
вать,
то
для
приведения
ее
к
нужной
величине,
ее
можно
трансформировать.
Рассмотрим
два
вида
волноводвых
трансформирующих
звеньев.
а)
Звено
длиной
l =
л/4,
где
л
-
длина
упругой
волны
в
даввом
звене.
Если
такое
звено
нагружено
на
реактивную
нагрузку:
±
iX
H
,
то
вход
ное
сопротивление
звена
определяется
из:
w
2
I
z .
о
при
Хн>О,
IBX
= - 1
Х
н
(9)
w
2
Z .
о
Хн<О.
IBX
=
1--
при
ХН
Здесь
Ш
О
-
волновое
сопротивление
звена.
Таким
образом,
рассматривае
мое
звено
трансформирует
инерционную
нагрузку
в
упругую,
а
упругую
8
инерционную,
изменяя
также
их
абсолютные
значения.
б)
Звено
длиной
l =
Л/8.
Можно
показать,
что
входное
сопротивление
такого
звена
будет
.
wo+
хн
Z2BX
= 1
Wo
Х
при
Хн>О,
wo-
н
.
wo-X
H
Z2BX
=
1Wo
+Х
при
Хн<О.
Wo
н
в
любом
из
этих
случаев
Z2BX>0,
Z2BX
<
О,
если
Wo>X
H
,}.
если
Wo<X
H
•
(10)
(11)
Следовательно,
такое
звено
трансформирует
реактивную
нагрузку
в
инер
ционную
или
в
упругую
в
зависимости
от
условия
(11).
Обозначив
а
-=
хн/ш
о
,
перепишем
выражения
(9)
и
(10)
в
виде
Z
.
Wo
lвХ
=
+1-,
а
Z
.
1±а
2ВХ
= 1
Wo
1 +
а
•
(12)
(13)
в
обоих
этих
случаях
знаки
выбираются
согласно
условиям
(9)
и
(10).
8::1..
Глава
3
МЕТОДЫ
ВВЕДЕНИИ
КОЛЕБАТЕЛЬНОЙ
ЭНЕРГИИ
ПРИ
ИЗМЕНИЮЩЕМСИ
ВХОДНОМ
СОПРОТИВЛЕНИИ
НАГРУЗКИ
Если
ZH
изменяется
вследствие
переменной
акустической
длины
на
грузки,
то
для
стабилизации
величины
входного
сопротивления
можно
предложить
несколько
решений.
§
1.
ИИПУe1lЬСНЫВ:
режии
ра&оты
В
импульсном
режиме
энергия
колебаний
генерируется
в
виде
импуль
сов,
заполненных
ультразвуковой
несущей
частотой.
Продолжительность
l'
импульса
и
период
T
i
повторения
выбираются
такими,
чтобы
время
прохождения
импульсом
пути,
составленного
волноводом
длиной
lB
И
нагрузкой
длиной
lH'
было
больше
1',
а
каждый
отраженный
от
конца
на
грузки
импульс
возвращался
к
преобразователю
после
излучения
после
дующего
импульса.
При
этих
условиях,
пренебрегая
отражениями
поряд
ка
выше
второго,
можно
принять,
что
в
колебательной
системе
практически
возникнут
бегущие
волны
и
входное
сопротивление
нагрузки
на
преоб
разователь
останется
постоянным,
не
зависящим
от
изменяющейся
длины
lH'
Для
исключения
возможного
отражения
на
границе
излучатель
нагрузка
следует
применить
согласование
между
нагрузкой
и
волноводной
системой.
Необходимые
характеристики
импульсного
режима
могут
быть
определены
следующим
образом:
для
максимального
сужения
спектра
им
пульсного
сигнала примем,
что
в
импульсе
должно
содержаться
не
менее
n
периодов
несущей
частоты.
Значение
n
определяется
из
условия,
что
наибольшая
часть
энергии
содержится
в
основной
частоте
f
спектра.
Тре
бование
минимально
допустимой
полосы
частот,
в
частности,
связано
с
тем,
что
вследствие
геометрической
дисперсии
скорости
распространения
упру
гих
колебаний
по
волноводной
системе
импульс
может
существенно
иска
зиться.
Кроме
того,
согласование
в
широком
диапазоне
частот
не
может
быть
удовлетворительным.
Отсюда
n
1'=-!
.
(14)
Для
исключения
воздействия
на
преобразователь
отраженного
импульса
одновременно
с
излучением
прямого
длина
пути
от
преобразователя
до
границы
переменной
длины
нагрузки
должна
быть
l>2c1',
(15)
где
l =
lB
+
lH;
с
-
скорость
звука.
Это
неравенство
должно
соблюдаться
в
течение
в(;его
времени
обработ
ки
объекта
переменной
длины.
Поэтому
условие
(15)
касается
и
началь
ного периода,
когда
длина
lH
нагрузки
мала.
Таким
образом,
минимальная
длина
волноводной
системы
(если
lH,
min
=
О)
должна
быть
[в,
min
=
2с1'.
(16)
Согласно
условию
15),
необходимо,
чтобы
T
i
:.=
21',
т. е.
частота
повторе-
ния
импульса
220
1
F.;=-
•
2т'
(17)