Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

$уют, то система регулирования работает в линейной зоне и
щамика описывается ранее приведенными передаточными
тми. Ширина линейной зоны по сигналу' задания скорости
Aw^ =±u
Jl
,
tp
.
где щ
ЧР
- граничное значение сигнала задания, при котором
jlMMVM тока якоря достигает допустимого значения Вели-
Щс.'р рассчитывается при моделирования или находится из
сального трафика переходного процесса i
a
=
/(/).
Л5.12. Регулировочная характс-
гнп П-регуятгора скорости
С
иичсннем выходного сигнала
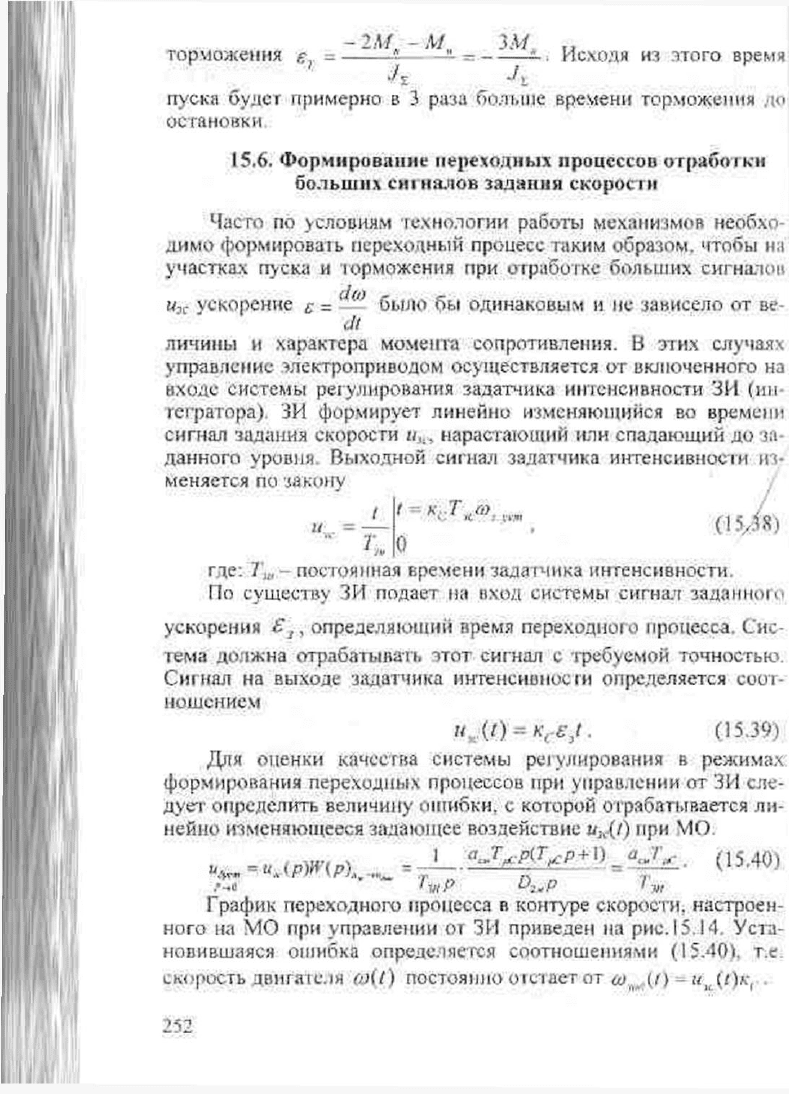
Рис.15ДЗ Переходный процесс пуста
М
юрмб-
жсння п системе регулмровони» скорости с
ограничением u
м
при М^М». u
c
»u
l1
, настрой-
ки МО
J
Если их>и
1(
-.
г
у то переходные процессы протекают с ограии-
рем тока якоря. Рассмотрим переходный процесс (см.
;
15.13) пуска на высокую скорость и остановку с этой скоро-
| когда на валу двигателя присутствует момент сухого трения,
гходный процесс построен прн следующих условиях:
U
M
, Мъоп
=
1Мн, М
С
=М„. контур скорости настроен на МО.
[ Процесс отработки больших сигналов: задания скорости про-
5т с ограничением а.,с в три этапа. На первом этапе ток якоря
гает от нуля до На втором этапе, когда тока якоря по-
тен 1
Л
~1дот регулятор скорости находится в режиме ограни-
выходного сигнала. На третьем этапе скорость близка к
юму значению, и регулятор скорости выходит из режима
шчения; тогда ток якоря начинает спадать и уменьшается до
шны / -
С:
LL
с
Ускорение разгона на втором этапе пуска
2Л/_ _ Л^
^
Отрицательное ускорение на втором этапе
Л
-2 М-М Ш ..
торможения е, = = . Исходя из этого время
•/ £
пуска будет примерно в 3 раза болите времени торможения до
остановки.
15.6. Формирование переходных процессов отработки
больших on налов задания скорости
Часто по условиям технологии работы механизмов необхо-
димо формировать переходный процесс таким образом, чтобы на
участках пуска и торможения при отработке больших сигналов
и
зс
ускорение с - было бы одинаковым и не зависело от ве-
<Й
личины и характера момента сопротивления. В этих случаях
управление электроприводом осуществляется от включенного на
входе системы регулирования задатчика интенсивности ЗИ (ни
тегратора). ЗИ формирует линейно изменяющийся во времени
сигнал задания скорости u
tl
, нарастающий или спадающий до за-
данного уровня. Выходной сигнал задатчика интенсивности из-
меняется по закону
л-,
05/
/
8)
1 j* О
где: T
w
- постоянная времени задатчика интенсивности.
По существу ЗИ подает на вход системы сигнал заданного
ускорения £ j, определяющий время переходного процесса. Сис-
тема должна отрабатывать этот сигнал с требуемой точностью.
Сигнал на выходе задатчика интенсивности определяется соот-
ношением
МО = П5.39)
Для оценки качества системы регулирования в режимах
формирования переходных процессов при управлении от ЗИ сле-
дует определить величину ошибки, с которой отрабатывается ли-
нейно изменяющееся залающее воздействие u
3l
(t) при МО.
- = М*.. (15.40)
.•-6 TvtP D
2
,P 7
w
График переходного процесса в контуре скорости, настроен-
ного на МО при управлении от ЗИ приведен на рис. 15.14. Уста-
новившаяся ошибка определяется соотношениями (15.401 т.е.
скорость двигателя со(/) постоянно оiстает от .,(/) - «„(/>-,
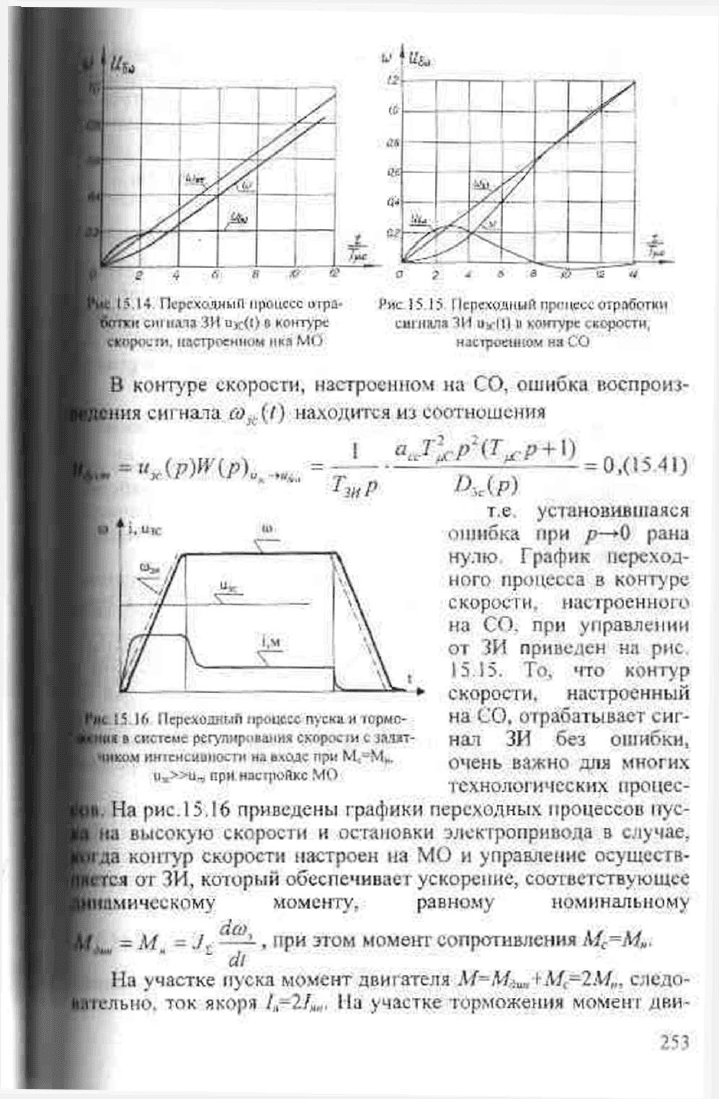
.15. U. Перс&слнмЛ процесс игра-
си cm пала ЗИ u>c<0 о контуре
ли. настроенном нка МО
»'яс)5 15 Г1срсхолныПпроцессогработки
сшняла
411 Ub-ll l II
контуре скорости,
настроенном на СО
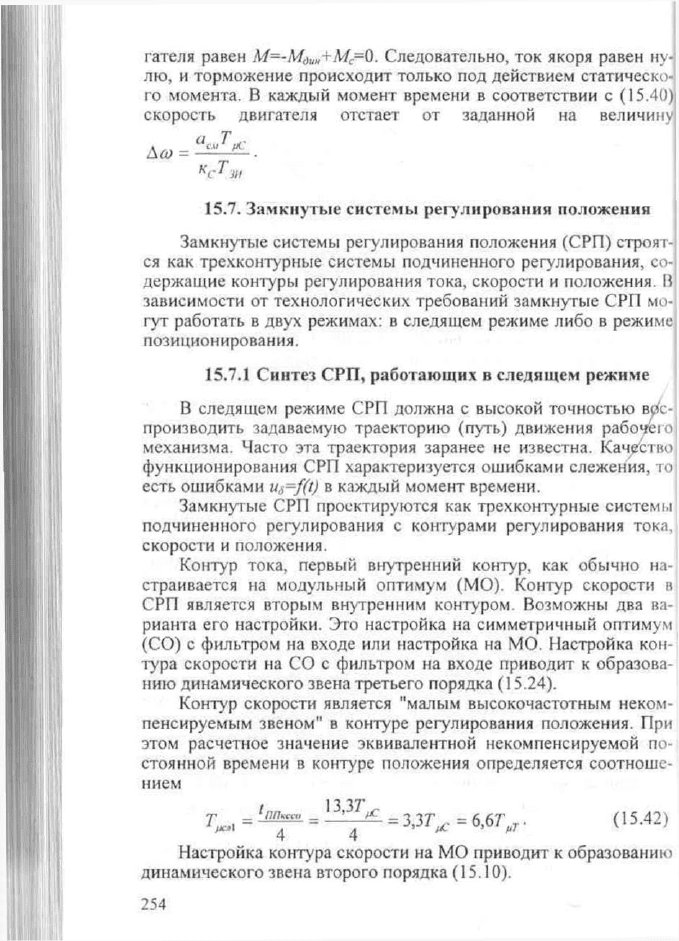
В контуре скорости, настроенном на СО, ошибка воспроиз-
1ия сигнала со
к
{!) находится из соотношения
1 ejjycr^p+i).
' Т
зи
р D.Jp)
= 0,(1541)
N.UK «а
ь»> //
7
U*:
у
V ^
1'/
/у
V ^
1'/
/у
15 Hi Переходный npouc.cc пуска
и
юрмс-
**1 t>
системе регулирования скорости с j.гот-
ом
HHICHCUUIIOCTH
на влодс
при M
;
-M
h
.
u,»u-, принасгроЯкс МО
т.е установившаяся
ошибка при р—>0 рана
нулю График переход-
ного процесса в контуре
скорости, настроенного
на СО. при управлении
от ЗИ приволен на рис
15.15. То, что контур
скорости, настроенный
на СО. отрабатывает сиг-
нал ЗИ без ошибки,
очень важно для многих
технологических процес-
На рис.15.16 приведены графики переходных процессов пус-
|~на высокую скорости и остановки электропривода в случае,
Гда контур скорости настроен на МО и управление осушеств-
:я от ЗИ, который обеспечивает ускорение, соответствующее
шческому моменту, равному номинальному
= М
ц
=./. . при этом момент сопротивления М
с
~Мы-
di
На участке пуска момент двигателя М=Мцш,
1
Л/,—2Л/„. сдедо-
1ыю. ток якоря /,,^2/
м
„. На участке торможения момент дви-
гателя равен М=-М
аин
+М
с
=0. Следовательно, ток якоря равен ну-
лю, и торможение происходит только под действием статическо-
го момента. В каждый момент времени в соответствии с (15.40)
скорость двигателя отстает от заданной на величину
«сТ
м
15.7. Замкнутые системы регулирования положения
Замкнутые системы регулирования положения (СРП) строят-
ся как трехконтурные системы подчиненного регулирования, со-
держащие контуры регулирования тока, скорости и положения. В
зависимости от технологических требований замкнутые СРП мо-
гут работать в двух режимах: в следящем режиме либо в режиме
позиционирования.
15.7.1 Синтез СРП, работающих в следящем режиме
В следящем режиме СРП должна с высокой точностью вос-
производить задаваемую траекторию (путь) движения рабочего
механизма. Часто эта траектория заранее не известна. Качество
функционирования СРП характеризуется ошибками слежения, то
есть ошибками Ut=f(t) в каждый момент времени.
Замкнутые СРП проектируются как трехконтурные системы
подчиненного регулирования с контурами регулирования тока,
скорости и положения.
Контур тока, первый внутренний контур, как обычно на-
страивается на модульный оптимум (МО). Контур скорости в
СРП является вторым внутренним контуром. Возможны два ва-
рианта его настройки. Это настройка на симметричный оптимум
(СО) с фильтром на входе или настройка на МО. Настройка кон-
тура скорости на СО с фильтром на входе приводит к образова-
нию динамического звена третьего порядка (15.24).
Контур скорости является "малым высокочастотным неком-
пенсируемым звеном" в контуре регулирования положения. При
этом расчетное значение эквивалентной некомпенсируемой по-
стоянной времени в контуре положения определяется соотноше-
нием
= = ^^ = 3,37> = 6,67>
•
(15.42)
4 4
Настройка контура скорости на МО приводит к образованию
динамического звена второго порядка (15.10).
Расчетное значение эквивалентной некомпенсируемой по-
нной времени в контуре положения при настройке контура
ти на МО определяется соотношением
• Т
тг
= = = 2,17> = 4,27>
•
(15.43)
Следовательно, при одинаковых типах настройки контура
'зжения время переходного процесса будет различаться в
Ml
6,6Т
рТ
_
1,57 раз в зависимости от типа настройки контура
1 4,2 Т„
т
JOCTH СО или МО. Поэтому при проектировании СРП контур
ЩЮсти рекомендуется настраивать на МО, чтобы быстродейст-
•контура положения было выше.
1/
/ *с •
ш
к
р.*
+1
р
Рис. 15.17. Расчетная структурная схема следящего электропривода
[ Расчетная структурная схема следящего электропривода
введена на рисунке 15.17. В этой структурной схеме контур
Ь'лирования положения по составу динамических звеньев по-
•ен контуру регулирования скорости. Он содержит следующие
|1амические звенья:
интегрирующее звено - объект регулирования с передаточ-
'й функцией
1 где: К pet = У. - коэффициент передачи редуктора;
/'рай
Г - апериодическое звено с малой некомпенсируемой постоян-
Ъй времени, представляющая собой свернутый контур скорости
гпсредаточной функцией
=
1 /к
с
где Т
ЦСЛ
-2Т
МС
;
(15.45)
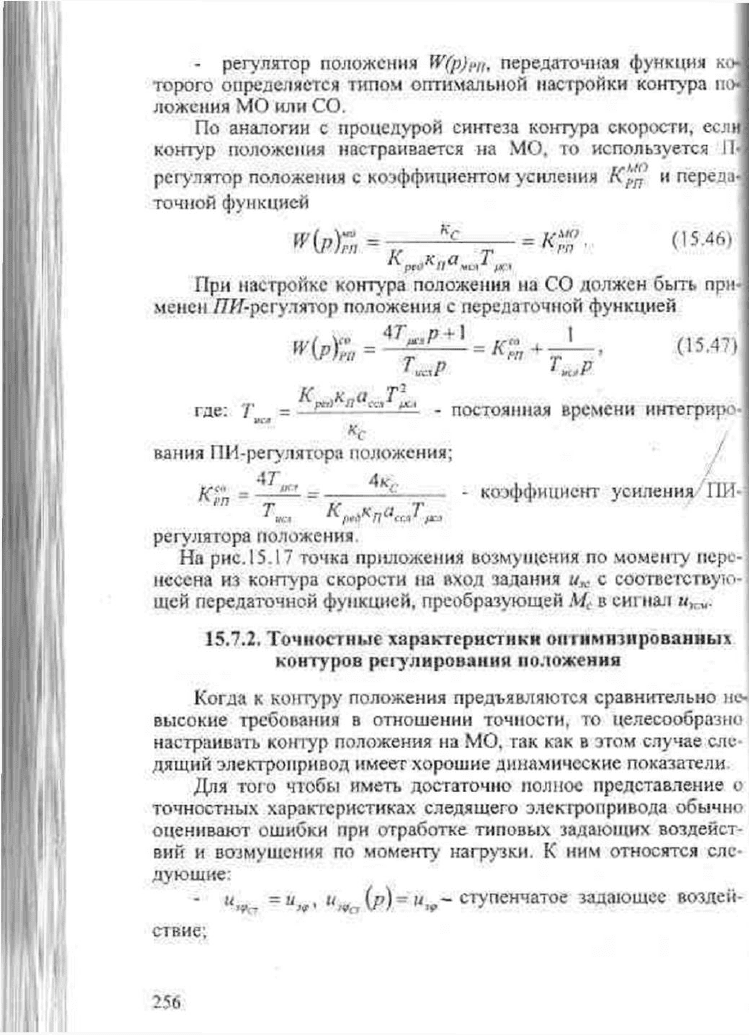
- регулятор положения Щр)иц, передаточная функция ко
торого определяется типом оптимальной настройки контура по
ложсния МО или СО.
По аналогии с процедурой синтеза контура скорости, если
контур положения настраивается на МО, то используется II
регулятор положения с коэффициентом усиления Кр£ и переда
точной функцией
w(p)7n =
г
*
с
- = Ко • 0 $.46)
При настройке контура положения на СО должен быть при-
менен ЯЯ-регулятор положения с передаточной функцией
= ^^
=
К
™+Т->
0 5>47)
Т^Р
г
шР
где: Т = _
постояннги
, времени ннтегриро-
*с
вания ПИ-регулятора положения;
fCj"
n
= ^ - коэффициент усиления ГШ-
регулятора положения
На рис. 15.17 точка приложения возмущения по моменту пере-
несена из контура скорости на вход задания и
х
с соответствую-
щей передаточной функцией, преобразующей М
с
в сигнал и^.
15.7.2. Точностные характеристики оптимизированных
контуров регулирования положения
Когда к контуру положения предъявляются сравнительно не-
высокие требования в отношении точности, то целесообразно
настраивать контур положения на МО. гак как в этом случае сле-
дящий электропривод имеет хорошие динамические показатели
Для того чтобы иметь достаточно полное представление о
точностных харакгеристиках следящего элекгропривода обычно
оценивают ошибки при отработке типовых задающих воздейст-
вий и возмущения по моменту нагрузки. К ним относятся сле-
дующие:
- и
—
и , и (р)-и -ступенчатое задающее воздей-
'Л-г '
'9а
» '
ствие;
и
ис;
= —f» (/>) =
;с>, -г-
19,
\г' -тт „
линеино изменяющееся воз-
=
—
f2
>
U
,
V
„M~
па
Р
а
болическое воздейст-
7
«11
/
м.
р гармоническое воздействие;
: Мс(р)-М
с
ступенчатое возмущение по моменту.
Мри настройке на МО передаточная функция ошибки от за-
дето воздействия записывается в следующем виде
Wipt
1
'. (15.49)
Ис = a^Jl^P* + а^Т^р +1 - характеристический
Зюм передаточной функции контура положения;
=
1
+
6 - коэффициент настройки на МО;
[рис, = 2 - стандартный коэффициент настройки на МО.
'Так как эта передаточная функция имеет в числителе сомно-
см оператор// в первой степени, то контур положения име-
тизм первого порядка относительно задающего возлейст-
едовательно, при настройке на МО следящий электропри-
абатывает ступенчатые воздействия с нулевой ошибкой
50)
[инейно изменяющиеся воздействия вида
и
^ = —/ отра-
||ваются с постоянной установившейся ошибкой, величина
й определяется соотношением (р—*0)
1
_ 1 + 0 _ (1551)
т
ш
р D
2
M " Т
ш
[При воспроизведении параболических воздействий
JL,*
т\
t установившаяся ошибка равна бесконсчност. так
при
[>—*0
1 а Т »(т л+ 0
-'=00. (15.52)
Tip
1
0
2а
(р)

Т.е., если па каком-то участке траектории слежения начинасг
действовать задающее воздействие вида и „ = г, ТО ошибки
Igvi *p
t
непрерывно накапливается (возрастает) до перехода на другой,
более простой участок траектории слежения, где накопившаяся
ошибка может быть скомпенсирована системой.
Ошибка слежения при воспроизведении гармонических вот
действий вида u
p9
,^b su\o),l изменяется с той же частотой и опро
дсдястся соотношением
-ft»sin(<9,/ + )т (15.53
и
х
, =
где: К
Гы
, - суммарный коэффициент усиления разомкнутого
скорректированного контура положения на частоте задающего
воздействия,
А (раз - фазовый сдвиг выходного сигнала замкнутою контура
положения на частоте воздействия Ы
и
определяемый по
передаточной функции
>НрГ =
\1К,
DM
Передаточные функции ошибки и отклонения скорости «г
воздействия статического момента при настройке контура поло-
жения на МО определяются соотношениями
w
t ую -
+
/15 <54
W(pf«>
=
^fi + (15.55)
Т*
Из передаточной функции (15.54) следует, что контур поло-
жения, настроенный на МО, имеет нулевой порядок астатизма
относительно входа приложения возмущения Л/, а установив-
шаяся ошибка от ступенчатог о приложения момента будет опре-
деляться соотношением
ИрйL = -л/
г
. (15.56)
Таким образом, точностные характеристики контура поло-
жения, настроенного на МО могут быть оценены с помощью со-
отношений (15.50) - (15.56).
Когда к контуру положения предъявляются высокие требо-
вания в отношении точности воспроизведения сложных траекто-
он должен быть настроен на СО Передаточная функция
ки от задающего воздействия с такой настройкой имеет вид
Так как эта передаточная функция имеет в числителе сомно-
ем оператор р во второй степени, то контур положения
астатизм второго порядка относительно задающего воздей-
5
1
Следовательно, при настройке на СО следящий электро-
д отрабатывает ступенчатые и линейно изменяющиеся за-
ле воздействия с нулевой установившейся ошибкой. При
,! И'(Р),,^
•
= "„v = 0 (15.58)
т
яР
KJPY
При отработке параболического задающего воздействия вида
;=-1_г
г
величина установившейся ошибки будет опреде-
Т
1
JU
я соотношением
Ошибка слежения при воспроизведении гармонических
щих воздействий вида u
i9
j*-bsinG)j определяется соотно-
яем (15.53), но коэффициент усиления разомкнутого скор-
эванного контура положения при настройке на СО на час-
задающего-воздействия обычно значительно выше, чем при
>йке на МО. Поэтому в установившемся режиме
Передаточные функции ошибки и отклонения скорости от
ействия статического момента при настройке контура поло-
ня на СО определяются соотношениями
05.6.)
с
562
»
Из передаточной функции (15.61) следует, что контур поло-
ня. настроенный на СО, имеет первый порядок астатизма от-
носительно возмущения по моменту, так как ее числитель содер
жит сомножителем операторр в первой степени. Установившаяс)
ошибка от ступенчатого приложения момента будет равна нулю.
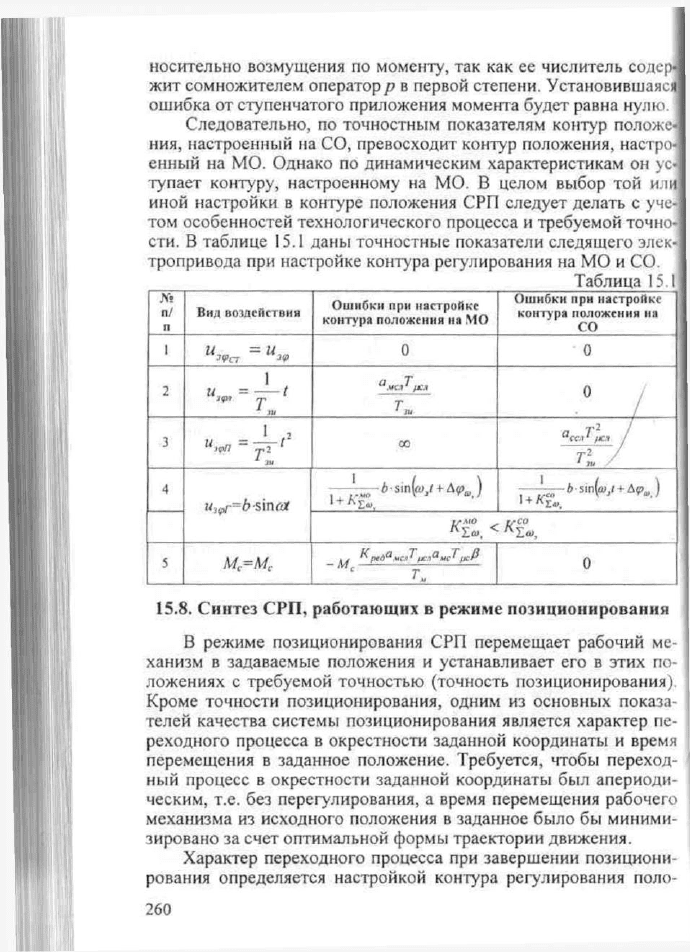
Следовательно, по точностным показателям контур положе
ния, настроенный на СО, превосходит контур положения, настро
енный на МО. Однако по динамическим характеристикам он ус
тупает контуру, настроенному на МО. В целом выбор той или
иной настройки в контуре положения СРП следует делать с уче-
том особенностей технологического процесса и требуемой точно-
сти. В таблице 15.1 даны точностные показатели следящего элек-
тропривода при настройке контура регулирования на МО и СО.
Таблица 15.1
X!
п/
п
Внл воздействия
Ошибки при настройкс
контура положения иа МО
Ошибки прн настройке
контура положения на
СО
1
и
1т
= и
1т
0
0
2
1
т
п
0
/
3
3U
00
/К,Ч
1
г- /
1
JU
4
u
lv
r=bs'mcot
——-Ь- sin(v + Ад».)
1 +
л
г<»,
—b -sinfoM +
Aftu )
1 +
u
lv
r=bs'mcot
1/МО
.
1/-СО
5
М
С
=М
С
,
,
К
pit>
a
*C.J „сР
T
u
0
15.8. Синтез СРП, работающих в режиме позиционирования
В режиме позиционирования СРП перемещает рабочий ме-
ханизм в задаваемые положения и устанавливает его в этих по-
ложениях с требуемой точностью (точность позиционирования).
Кроме точности позиционирования, одним из основных показа-
телей качества системы позиционирования является характер пе-
реходного процесса в окрестности заданной координаты и время
перемещения в заданное положение. Требуется, чтобы переход-
ный процесс в окрестности заданной координаты был апериоди-
ческим, т.е. без перегулирования, а время перемещения рабочего
механизма из исходного положения в заданное было бы миними-
зировано за счет оптимальной формы траектории движения.
Характер переходного процесса при завершении позициони-
рования определяется настройкой контура регулирования поло-