Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

(W
Ич
n J
M
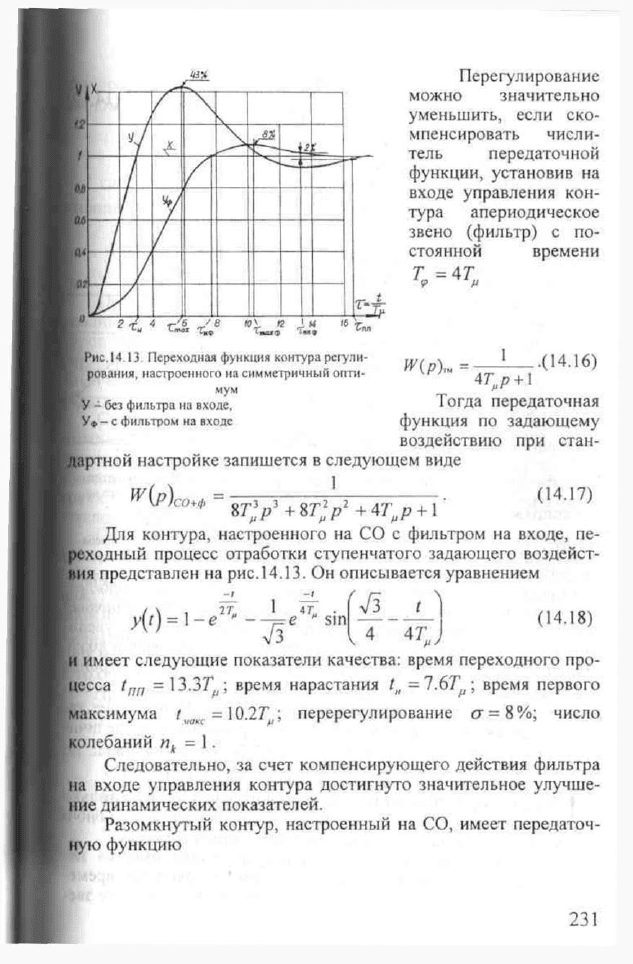
Перегулирование
можно значительно
уменьшить, если ско-
мпенсировать числи-
тель передаточной
функции, установив на
входе управления кон-
тура апериодическое
звено (фильтр) с по-
стоянной времени
Т = 4 Т
<р м
Тпп
I Рис. 14 13 Переходная функция контура регули-
I рования, настроенного на симметричный опти-
мум
' У - без фильтра на входе.
У® - с фильтром на входе
I
,.(14.16)
47> +
1
Тогда передаточная
функция по задающему
воздействию прн стан-
дартной настройке запишется в следующем виде
Для контура, настроенного на СО с фильтром на входе, пе-
реходный процесс отработки ступенчатого задающего воздейст-
вия представлен на рис. 14.13. Он описывается уравнением
I 4 т ш (ж
4
/Л , 2Г„ I 4Г . V J
у{') =
]
-
е
s,n
7"
4 Т
(14.18)
ж
имеет следующие показатели качества: время переходного про-
цесса 1
ПП
= 13.37^; время нарастания t
H
=7.67'
fl
\ время первого
максимума t = 10.27'перерегулирование сг = 8%; число
колебаний n
k
= 1.
Следовательно, за счет компенсирующего действия фильтра
на входе управления контура достигнуто значительное улучше-
. ние динамических показателей.
Разомкнутый контур, настроенный на СО, имеет передаточ-
[ ную функцию
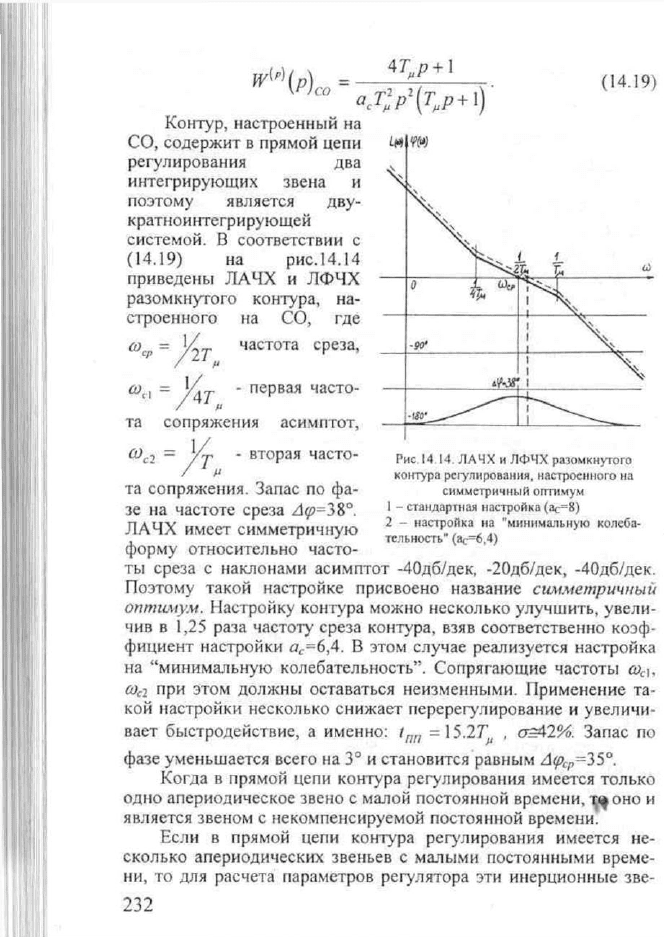
Контур, настроенный на
СО, содержит в прямой цепи
регулирования два
интегрирующих звена и
поэтому является дву-
кратноинтегрирующей
системой. В соответствии с
(14.19) на рис.14.14
приведены J1A4X и ЛФЧХ
разомкнутого контура, на-
строенного на СО, где
= 1/„ частота среза,
"JZp
2
(T„P+ 1)'
(14.19)
со
со,,
=
'27.,
'47"
- первая часто-
та сопряжения асимптот,
со..,
= - вторая часто-
Рис.14 14. ЛАЧХ и ЛФЧХ разомкнутого
контура регулирования, настроенного на
симметричный оптимум
1 - стандартная настройка (ас=8)
2 - настройка на "минимальную колеба-
тельность" (ас=6,4)
та сопряжения. Запас по фа-
зе на частоте среза Лср=38°.
ЛАЧХ имеет симметричную
форму относительно часто-
ты среза с наклонами асимптот -40дб/дек, -20дб/дек, -40дб/дек.
Поэтому такой настройке присвоено название симметричный
оптимум. Настройку контура можно несколько улучшить, увели-
чив в 1,25 раза частоту среза контура, взяв соответственно коэф-
фициент настройки С7
с
=6,4. В этом случае реализуется настройка
на "минимальную колебательность". Сопрягающие частоты со
сь
со
С
2 при этом должны оставаться неизменными. Применение та-
кой настройки несколько снижает перерегулирование и увеличи-
вает быстродействие, а именно: t
nn
=15.2Г,
(
, <7=М%. Запас по
фазе уменьшается всего на 3° и становится равным Лср
ср
=35°.
Когда в прямой цепи контура регулирования имеется только
одно апериодическое звено с малой постоянной времени, TJ^OHO и
является звеном с некомпенсируемой постоянной времени.
Если в прямой цепи контура регулирования имеется не-
сколько апериодических звеньев с малыми постоянными време-
ни, то для расчета параметров регулятора эти инерционные зве-
b необходимо заменить одним эквивалентным апериодическим
|с)юм с постоянной времени 7"
W(P)„ =
1
т
>к
р +
1
(14.20)
где: 7^ =7)
+
...
+
Т
п
- эквивалентная некомпенсируемая по-
веянная времени.
14.8. Порядок синтеза контуров в системах электропри-
вода с подчиненным регулированием
Поскольку системы электропривода с подчиненным регули-
}ванием строятся по иерархическому принципу, то синтез кон-
ов производится после принятия решения о числе контуров
Гулирования и выделения в силовой части электропривода ди-
мических звеньев (объектов регулирования контуров) с соот-
твующими выходными регулируемыми координатами.
Системы регулирования момента выполняются одноконтур-
ными. Системы регулирования скорости обычно строятся как
сконтурные, содержащие контур тока и контур скорости.
(Мстемы регулирования положения чаще всего выполняются как
;контурные, содержащие контур тока, контур скорости и кон-
(р положения.
Сначала синтезируются внутренний (первый) контур тока,
м второй контур - контур скорости, а последним - контур по-
ения, если разрабатывается система регулирования положе-
Ья. Тип оптимальной настройки каждого контура (МО или СО)
•висит от требований, предъявляемых к контуру и к системе
Ьктропривода в целом. Передаточная функция регулятора кон-
ра находится, исходя из вида передаточной функции разомкну-
ло оптимизированного контура регулирования.
При настройке на МО разомкнутый контур имеет передаточ-
Дгю функцию
1
м
W
[р]
(р) = г <
14
-
21
)
\"/мо
r
JV л
Передаточная функция регулятора для настройки контура на
[О W(p)
MP
находится из уравнения
W{p)„
P
W{p\w(p)
0P
= ' у (14.22)
где: W{p)
fi
- передаточная функция апериодического звена с
малой некомпенсируемой постоянной времени, W{p)
or
-
передаточная функция объекта регулирования. Тогда
W(p)
Ml
,= I ' • (Н.23)
a
M
T
,P
W
\P)or
При настройке на СО разомкнутый контур имеет передаточ-
ную функцию
^(р)со= «С .V (И.24)
Передаточная функция регулятора для настойки контура на
СО fV(p)
<r
находится из уравнения
Г(р)
с
Мр)Л(Р)ог = "С' ,Г
(14
'
25)
ОсТ„Р {Т
/1
Р + \)
Тогда
/ ч 4Г р +1
fV(p)cr =
т2
'Lt \ • (
1426
>
«Лр
В контуре тока \У(
р
)^
т
- передаточная функция тиристорного
(транзисторного) преобразователя, питающего якорную цепь.
В контуре скорости W(p)^c - эквивалентная упрощенная пе-
редаточная функция замкнутого контура тока, - апериодическое
звено с малой постоянной времени Т^-.
В контуре положения Щр)^л - эквивалентная упрощенная
передаточная функция замкнутого контура скорости, - апериоди-
ческое звено с малой постоянной времени Т^р.
Из уравнений (14.23) и (14.26) регуляторов, обеспечивающих
оптимальные настройки контуров, видно, что они содержат в
знаменателе передаточную функцию объекта регулирования
W(p)
opi
т.е. по существу содержит динамическое звено, переда-
точная функция которого обратна передаточной функции объекта
регулирования. Следовательно, регулятор компенсирует динами-
ческие свойства объекта регулирования. Для двух последова-
тельно включенных динамических звеньев с передаточными
функциями W(p) и \/W(p) справедливо соотношение
Х(рЩр)^Х{р), (14.27)
т.е. эти два последовательно включенных взаимно обратных ди-
намических звена компенсируют друг друга.
В результате следует отметить, что с помощью оптимизи-
Цощего регулятора контура регулирования решается две зада-
^ во-первых, компенсируется инерционность объекта регулиро-
ния, и, во-вторых, вводятся в контур регулирования дополни-
льные динамические звенья, которые совместно с некомпенси-
«мым динамическим звеном с малой постоянной времени обра-
•^от контур регулирования, имеющий желаемую оптимальную
стройку. При этом коэффициенты передаточных функций оп-
мизированных контуров не содержат параметров динамиче-
ич звеньев объектов регулирования (ОР), а содержат только
рлые некомпенсируемые постоянные времени и коэффициен-
настройки.
г С физической точки зрения этот результат объясняется тем,
® регуляторы обеспечивают строго определенную форсировку
пала управления на входе ОР и тем самым компенсируют их
Церционность динамические свойства.
Варианты настроек контуров двухконтурных систем регули-
Ьвания скорости определяются желаемыми техническими ха-
жтеристиками. Когда требуемый диапазон регулирования ско-
ги ограничен и составляет £)=20н-50, а к динамическим харак-
'ристикам предъявляются повышенные требования, то:
- контур тока настраивают на МО,
- контур скорости также настраивают на МО.
Такая система регулирования скорости обладает следующи-
И динамическими характеристиками: время переходного про-
веса t
пп
=
97>=187;
r
«баний п
к
=1;
перерегулирование а = 8%; число ко-
жесткость механической характеристики
/>ш =
р.
Если желаемый диапазон регулирования скорости составляет
=
1000-И 0000, а требования к динамическим характеристикам
Tfe
столь высоки, то контур тока настраивают на МО, контур ско-
Ьсти настраивают на СО и на его управляющем входе включают
Цжльтр с передаточной функцией
4 +
1
Такая система регулирования скорости обладает следующи-
ми динамическими характеристиками: время переходного про-
цесса 1
ПП
= =347^
г
; перерегулирование при отработке за-
лающего воздействия cr, ~ 12 %; число колебаний п. - 1; пере-
регулирование момента при отработке возмущения по М
с
a
biC
sar
55%; число колебаний n
w
-2: жесткость механической
характеристики \р\ - «>.
Трехко1гтурные системы регулирования положения имеют
следующие варианты настроек ко»гтуров регулирования.
Если требования к точности не столь высоки, а к динамиче-
ским характеристикам предъявляют повышенные требования, то
контур тока настраивают на МО. контур скорости настраивают на
МО и контур положения настраивают на МО.
Такая система регулирования положения обладает следую-
щими динамическими характеристиками время переходном
процесса регулирования положения t
nn
= 9Т^ =
I
&Т
/С
= 36T.
i;
.
перерегулирование при отработке задающего воздействия
<т -г
8
%; число колебаний = 1; точностные характеристики
удовл етворител ьн ые.
Если к точности системы регулирования положения предъ-
являются повышенные требования, то контур тока настраиваю»
на МО. контур скорости настраивают на МО и контур положения
настраивают на СО
Такая система регулирования положения обладает следую-
щими динамическими характеристиками: быстродействие систе-
мы регулирования положения !
пп
- 17T
/ltJ
= 347^ = 687'
лГ
; пе-
ререгулирование с =60%: число колебаний =2; точност-
ные характеристики хорошие.
14.9. Тирпсторпын преобразователь как динамическое
звено
Базовой величиной при определении быстродействия конту-
ров и системы электропривода в целом является малая постоян-
ная времени некомпенсируемого апериодического звена контура
регулирования toka Таким звеном в электроприводах посто-
янного тока является тиристорный преобразователь (или ШИР -
транзисторный иреобравзователь), от которого питается якорная
цепь электродвигателя. Эти преобразователи по принципу своей
работы являются дискретными элементами. После включения
очередного тиристора воздействие па преобразователь возможно
только спустя некоторое время, когда система управления подаст
импульс на открывание очередного тиристора. Строго говоря,
236
орный преобразователь представляет собой нелинейное
^ическое звено с запаздыванием, имеющее передаточную
ию
»'(р)
т
=
Кс
тп
-". (14.29)
где: Кур - нелинейный коэффициент усиления тиристорного
"рВзователя: в расчетах берется максимальная величина Ктп
глах регулирования близких к 9(У', когда выпрямленное на-
-ние Ш
f = —
1
— - среднестатистическое запаздывание;
2 mf
t
i/
t
- частота питающей сети;
m - число пульсаций выпрямленного напряжения, за период
зщего напряжения Т
с
- •
Щ
Обычно приближенно считают, что гиристорный преобразо-
~ь является линейным звеном с передаточной функцией
w(pU
Km
» (14.30)
V
й
| этом постоянная времени 7Ул принимается равной среднеста-
ческому запаздыванию и зависит от используемой схемы
*1рямлення:
1
- 7'гл~0.01с для однофазной двухполупериодной схемы;
- 7777=0.0066с для трехфазной нулевой;
- 7У/7
=
0,0034с для трехфазной мостовой схемы.
Следовательно, в быстродействующих системах электропри-
п целесообразно применять тиристорные преобразователи с
увой схемой выпрямления.
Полупроводниковые преобразователи с широтно-нмпуль-
1М управлением также удобно представлять в виде непрсрыв-
. инерционного звена с постоянной времени Т
ш
- у^ , где/„
ущая частота ШИР-регулятора. Эти преобразователи обла-
высоким быстродействием, поскольку несущая частота со-
яет несколько кГц.
Глава 15. Типовые системы регулирования электропри
водов постоянного тока
15.1. Системы регулирования скорости
Современные электроприводы постоянного тока, обеспечи-
вающие регулирование скорости в широких пределах, проекти-
руются и выпускаются промышленностью как двухконтурные
системы с подчиненным регулированием координат. Внешним
контуром регулирования является контур скорости, а внутренним
—
контур тока. Регулирование скорости в этих системах осущест-
вляется изменением напряжения на якоре двигателя. В качестве
преобразователей постоянного тока, питающих якорь обычно ис-
пользуются управляемые выпрямители - тиристорные преобра-
зователи (ТП) или преобразователи постоянного напряжения - в
регулируемое постоянное с широтно-импульсной модуляцией -
ШИМ-преобразователи.
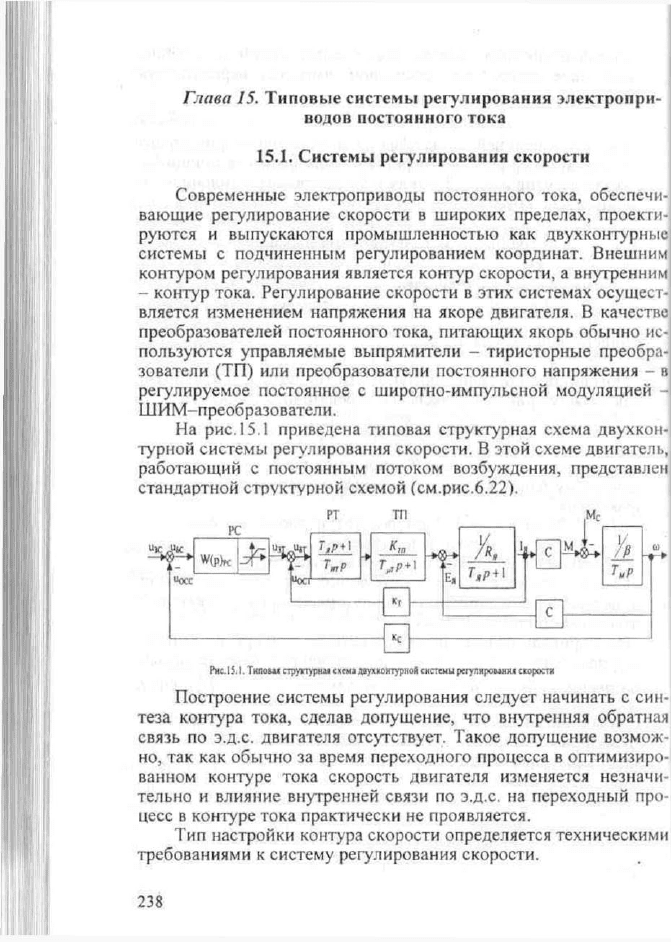
На рис.
15.1
приведена типовая структурная схема двухкон-
турной системы регулирования скорости. В этой схеме двигатель,
работающий с постоянным потоком возбуждения, представлен
стандартной структурной схемой (см.рис.6.22).
РТ
ТП
PC
"осс
W(pk
Jocr
bill
T„P
1
E.
У*,
T,P*1
,Mc
1
TyP
Рис.15.1.
Типом» стругтурвм схем» мухионтурной системы
регулировщиц скорости
Построение системы регулирования следует начинать с син-
теза контура тока, сделав допущение, что внутренняя обратная
связь по э.д.с. двигателя отсутствует. Такое допущение возмож-
но, так как обычно за время переходного процесса в оптимизиро-
ванном контуре тока скорость двигателя изменяется незначи-
тельно и влияние внутренней связи по э.д.с. на переходный про-
цесс в контуре тока практически не проявляется.
Тип настройки контура скорости определяется техническими
требованиями к систему регулирования скорости.
г
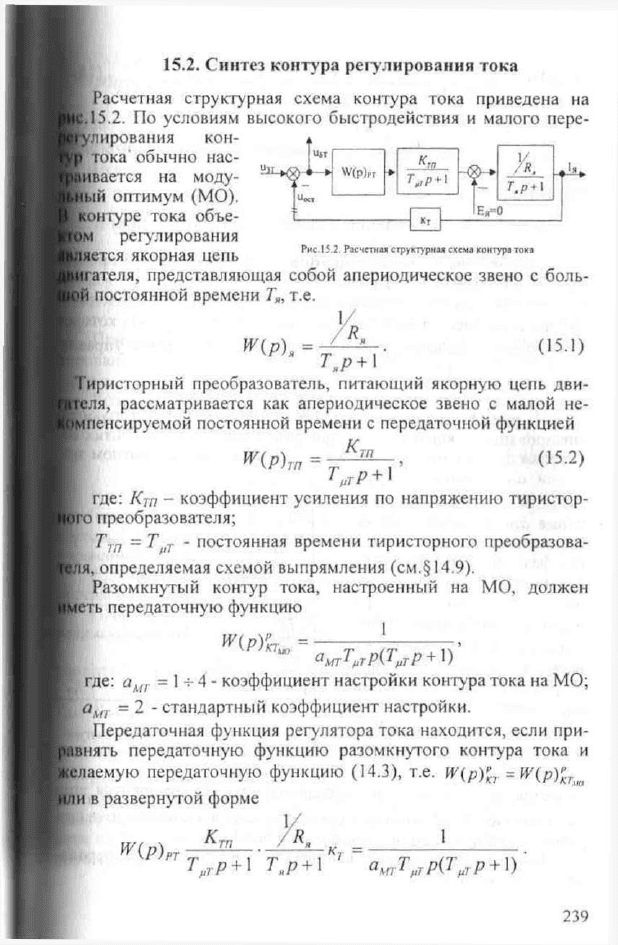
15.2. Синтез контура регулирования тока
Расчетная структурная схема контура тока приведена на
£.15.2. По условиям высокого быстродействия и малого пере-
лнрования кон-
ff тока обычно нас-
ливается на моду-
•Ый оптимум (МО),
•онтуре тока объе-
Ом регулирования
[яется якорная цепь
рис ,5 г Рас
"
сгиа>
"»«»"«««" »»
Ьателя, представляющая собой апериодическое звено с боль-
Ьй постоянной времени Т
и
, т.е.
1
*Г(р)
я
=
(15.1)
Т
Я
Р
+ 1
ГГиристорный преобразователь, питающий якорную цепь дви-
гсля, рассматривается как апериодическое звено с малой не-
[мпенсируемой постоянной времени с передаточной функцией
Т„тР +1
где: K
w
- коэффициент усиления по напряжению тиристор-
|го преобразователя;
Т
гп
= T
fiT
- постоянная времени тиристорного преобразова-
ния, определяемая схемой выпрямления (см.§14.9).
! Разомкнутый контур тока, настроенный на МО, должен
^1еть передаточную функцию
ELl:. 'Т "" '* '
>кт.
ЩрУъ
амтТ?тР(Т
м
тР +1)
где: й
Л(/
. =
1
-г 4 - коэффициент настройки контура тока на МО;
а
М7
= 2 - стандартный коэффициент настройки.
Передаточная функция регулятора тока находится, если при-
Вявнять передаточную функцию разомкнутого контура тока и
Иелаемую передаточную функцию (14.3), т.е.
W(p)
p
Kr
= W{pY
KTm
Али в развернутой форме
Щр),
К
ТП
'R.
1
•
Кг
=
Т„гР + 1
Т.р+
1
a
m
T
ilT
p(T
/jr
p
+
\)
Тогда
Щр),г -
Т,р + \
_7> + 1_
т
А/7'
D
лГ/
7
W
.(15.3)
ТнтР
где:
Т
нт
=
Я
Ttf т
Т
рТ
- постоянная времени интегриро-
вания регу лятора тока
Т
- коэффициент усиления регулятора тока
ИТ
Следовательно, регулятор тока представляет собой пропор-
ционально-интегральное звено.
Из передаточной функции (15.3) следует, что в составе регу-
лятора тока имеется форсирующее звено W{p) = Т
к
р +1. которое
компенсирует действие апериодического звена объекта управле-
иия
Щ-рЪ
=
т~Т'
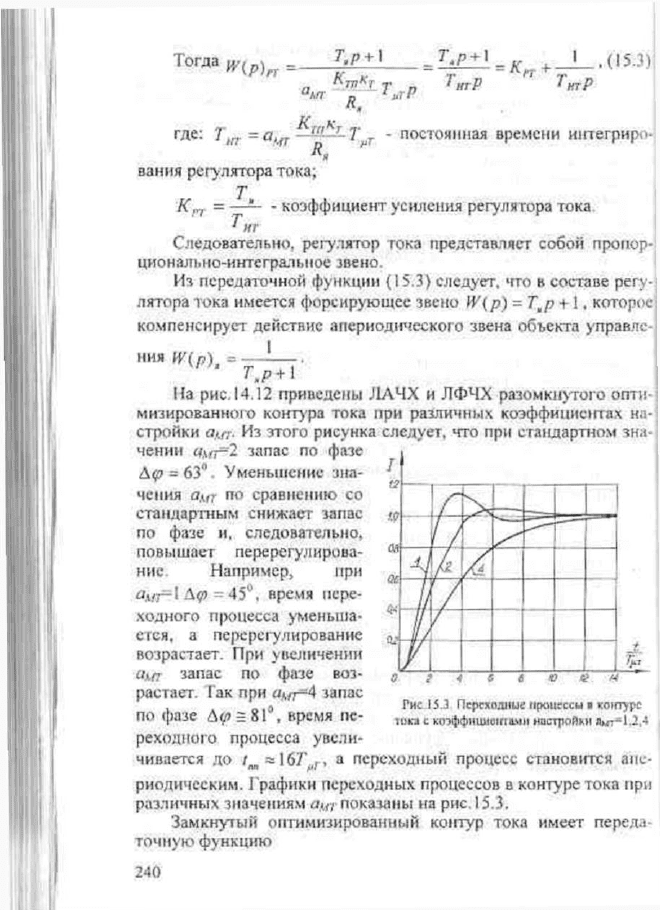
На рис. 14.12 приведены ЛАЧХ и ЛФЧХ разомкнутого опти-
мизированною контура тока при различных коэффициентах на-
стройки аш- Из этого рисунка следует, что при стандартном зна-
чении с*д*т=2 запас по фазе
Д(р = 63°. Уменьшение зна-
чения а,щ по сравнению со
стандартным снижает запас
по фазе и, следовательно,
повышает перерегулирова-
ние. Например, при
Дд/7=1 = 45°, время пере-
ходного процесса уменьша-
ется. а перерегулирование
возрастает. При увеличении
Qt.fi запас по фазе воз-
растает. Гак при азапас
по фазе = 81°, время пе-
реходного процесса увели-
чивается до / »167\
г
•
а переходный процесс становится апе-
—
р-
4
Ф Ф Ф
/
Ф
Гис 15.3 Переходные процессы • контуре
юка с коэффтшошамм настройки Ямт=1.2,4
рноднчсским. Графики переходных процессов в контуре тока при
различных значениям a
w
показаны на рис. 15.3.
Замкнутый оптимизированный контур тока имеет переда-
точную функцию