Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

;я блокирующий контакт 13-14(КМ1). Катушка КМ2 получа-
|пнтаиис, и контактор КМ2 подключает статорную обмотку к
тощей сети, изменив чередование фаз. Магнитное поле элек-
"двигателя начинает вращаться в противоположном направле-
И, а ротор по инерции вращается в прежнем направлении. По-
му асинхронный двигатель переходит в режим торможения
ивовключением до полной остановки, а затем разгоняется в
давлении «Назад». Этот процесс показан на рис.4.19. При раз-
~е «Назад» реле контроля скорости замыкает свой контакт 11-
R-B), подготавливая схему к остановке. В цепи катушки реле
можения КТ контактор замыкает 3-15(КМ2), При нажатии
пки SBI-C катушка реле торможения КТ получает питание и
е КТ срабатывает, размыкая контакт 3-4(КТ) и замыкая кон-
3-11(КТ) Контактор КМ2 теряет питание и отключает ста-
ную обмотку от питающей сети. При этом контактор КМ2 за-
дает свой блокировочный контакт 6-7(КМ2) в цепи катушки
. Котгтактор КМ1 срабатывает, так как катушка КМ1-В полу-
питание по цепи
3-1
(КТ), 11-6(SR-H), 6-7(КМ2). Статорная
Зиотка подключается прямым чередованием фаз, «Вперёд», а
ор вращается по инерции в направлении «Назад». Поэтому
Синхронный двигатель переходит в режим торможения проти-
ключенисм. Тормозной момент электропривода в режиме
рможення М
т
=-(М
С
-М„„). Когда скорость снизится практически
нуля, реле контроля скорости SR разомкнёт свой контакт 3-11
) и катушка КМ1 потеряет питание, а контактор KM
I
отклю-
статориую обмотку от питающей сети.
В технологических установках применяются электроприво-
де
двухскоростными асинхронными электродвигателями, у ко-
)рых ступенчатое регулирование скорости достигается за счет
лСнения числа пар полюсов путём изменения схемы включения
Циально выполненной статорной обмотки (см.§4.4)
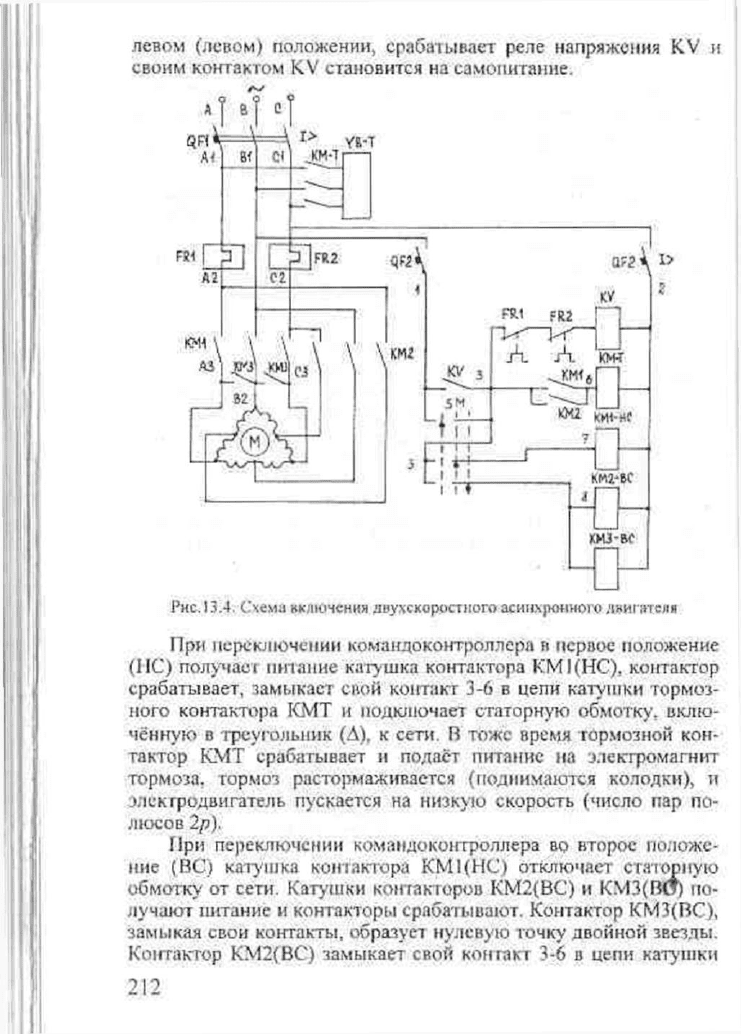
На рнс.13.4 приведена схема нереверсивного электропривода
[двухскоростным асинхронным двигателем. В схеме предусмот-
рю переключение статорной обмотки с треугольника на двой-
звезду (Д/YY). Такая схема применяется в электроприводах
анизмов. если по технологии требуется регулирование скоро-
с постоянной мощностью на рабочем органе. Механические
»актеристнки электропривода по схеме рис.
13.4
приведены на
ис.4.21.
Управляющие команды в схему подаются трёхпозициониым
мандоконтроллером SM. В исходном положении, когда вклю-
ны автоматы QF1 и QF2 и командоконтроллер находится в ну-
левом (левом) положении, срабатывает реле напряжения KV и
своим контактом KV становится на самоиитаиие.
Рис. 13.4.
Схема включения дну.чскоростнога асинхронного двигателя
При переключении командоконтрОллера в первое положение
(НС) получает питание катушка контактора КМ1(НС), контактор
срабатывает, замыкает свой контакт 3-6 в цепи катушки тормоз-
ного контактора КМТ и подключает статорную обмотку, вклю-
чённую в треугольник (А), к сети. В тоже время тормозной кон-
тактор КМТ срабатывает и подает питание на электромагнит
тормоза, тормоз растормаживается (поднимаются колодки), и
электродвигатель пускается на низкую скорость (число пар по-
люсов 2 р).
При переключении командокоигроллера во второе положе-
ние (ВС) катушка контактора КМ1(НС) отключает статорпую
обмотку от сети. Катушки контакторов КМ2(ВС) и КМЗ(В(У) по-
лучают шггание и контакторы срабатывают. Контактор КМЗ(ВС),
замыкая свои контакты, образует нулевую точку двойной звезды.
Контактор КМ2(ВС) замыкает свой контакт 3-6 в цепи катушки
рмозного контактора КМТ, контактор КМТ срабатывает или
1Йтся включённым. Одновременно контактор КМ2(ВС) под-
>чает вершину- двойной звезды статорной обмотки и двигатель
Бкается на высокую скорость (число пар полюсов р). как пока-
ю рис.4.21. Чтобы остановить электропривод необходимо пе-
ключнть командоконтроллер в нулевое положение. В этом слу-
контакторы теряют питание, статорная обмотка отключается
;сети и контакты КМТ оказываются разомкнутыми. Контактор
снимает питание с катушки электромагнитного тормоза, и
озиые колодки накладываются на тормозной барабан Элек-
ивол останавливается под действием момента сопротивле-
я М
с
и момента М^ механического тормоза.
Глава N. Принципы построении систем управлении
электроприводами
14.1. Основные пош1тия и определения
Под управлением в электроприводе понимают организацию
цссса электромеханического преобразования энергии, обеспе-
МЮ1ИУЮ требуемые режимы работы технологических машин и
г
Ханизмов в установившихся и переходных режимах.
Автоматическим регулированием называется такое функ-
|рнирование системы, когда регулируемый параметр изменяет-
ifc соответствии с требованиями технологического процесса без
ямого вмешательства человека-оператора.
Возмущение сигнал воздействия на узлы и элементы сис-
мы электропривода, приводящий к отклонению регулируемой
" >динаты от заданного значения.
Системой управления электроприводом называется комплекс
шратных средств, реализующих алгоритмы включения, вы-
ючеиия и защиты каждого электропривода и взаимодействие
гплекса электроприводов при выполнении сложных техноло-
ХЧеских процессов. Системы управления электроприводами
>ятея с использованием релейно-контакторной аппаратуры и
)рОграммируемых контроллеров
Системой регулирования электропривода называется такая
стема, которая позволяет изменять в широких пределах выход-
коордииату электропривода в соответствии с требованиями
ПОДОГИ чес кого процесса. В составе систем регулирования
[электроприводов обычно используются управляемые преобразо-
ватсди электрической энергии постоянного и переменного тока
В зависимости от назначения и технических требований, предъ-
являемых к электроприводу, различают два типа построения сис-
тем регулирования:
- разомкнутые системы регулирования;
- замкнутые системы регулирования.
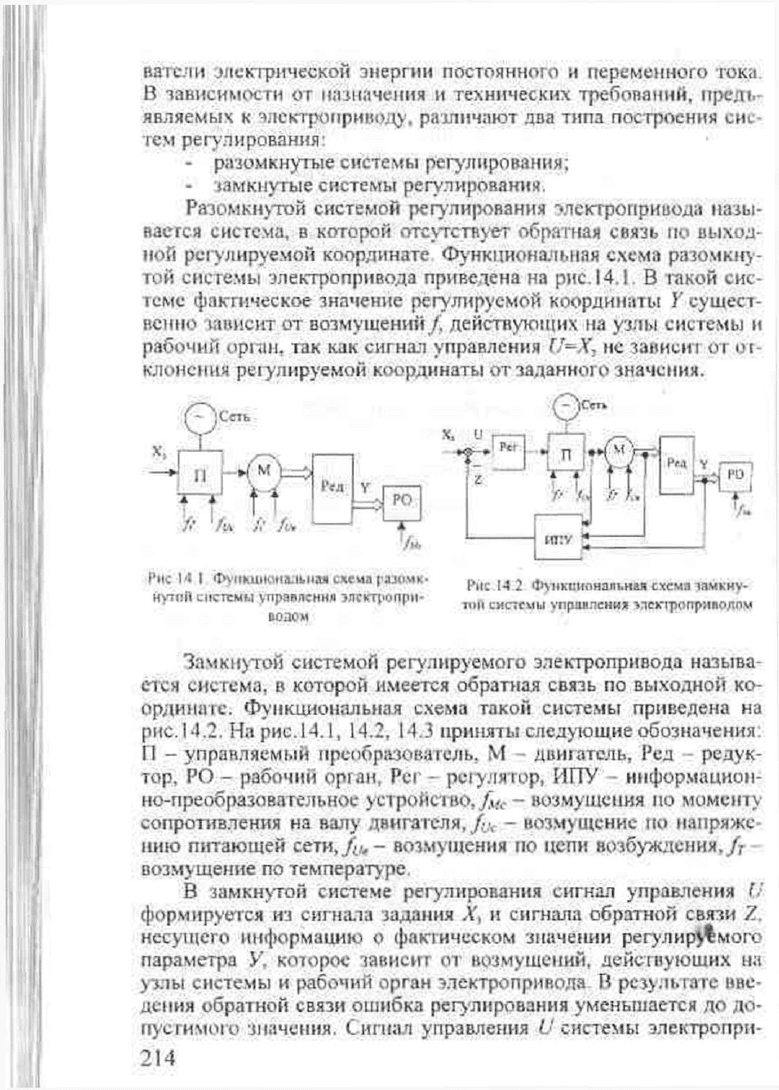
Разомкнутой системой регулирования электропривода назы-
вается система, в которой отсутствует обратная связь по выход-
ной регулируемой координате Функциональная схема разомкну-
той системы электропривода приведена на рис.
14.1
В такой сис-
теме фактическое значение регулируемой координаты Y сущест-
венно Зависит от возмущении/, действующих на узлы системы и
рабочий орган, так как сигнал управления U—X, не зависит от ос
клонения регулируемой координаты от заданного значения.
Рнс И I Функциональна
схе«а
Г
«Омк.
P((c |4 2 фу1)К1Шонал1
.
на)| схсма mMlCHV
.
нутпй систсмы управления
злеаропри-
TOft систсхш упршшсни
, ,
1Ск
-
ф()пр)И10Л
пм
Замкнутой системой регулируемого электропривода называ-
ется система, в которой имеется обратная связь по выходной ко-
ординате. Функциональная схема такой системы приведена на
рис. 14,2. На рис. 14.1, 14.2, 14.3 приняты следующие обозначения:
П - управляемый преобразователь. М двигатель, Рсд редук-
тор, РО - рабочий орган, Per - регулятор, ИПУ ннформацион-
но-преобразовательное устройство,/^- возмущения по моменту
сопротивления на валу двигателя,/^ - возмущение по напряже-
нию питающей сети,/,,- возмущения по цепи возбуждения,/
г
возмущение по температуре.
В замкнутой системе регулирования сигнал управления V
формируется из сигнала задания Л', гг сигнала обратной связи Z.
несущего информацию о ([тактическом значении регулируемого
параметра У. которое зависит от возмущений, действующих на
утлы системы и рабочий орган электропривода В результате вве-
дения обратной связи ошибка регулирования уменьшается до до-
пустимого значения. Сигнал управления U системы электропри-
с обратной связью представляет собой отклонение (ошибку)
«улнровапия относительно сигнала задания А',. При этом ни
J0 из возмущений не измеряется, а их влияние на регулируе-
•й парамсф воспринимается системой по каналу обратной свя-
, Следовательно, в системах с отрицательной обратной связью
ыходному параметру реализуется управление по отклонению.
14.2. Обратные связи и их назначение
Обратная связь представляет собой канал передачи и преоб-
вания информации с выхода системы регулирования или ее
JOB на вход с целью формирования результирующего сигнала
вления.
Уравнение сигнала управления 1)=Хф7.. В зависимости от
-а сигнала Z обратная связь бывает положительной или отрн-
гельной. Если
си1
нал обратной связи 7. суммируется с сигни-
N1
задания X., то Обратная связь называется положительной. Ес-
сигнал обратной связи /. вычи тается из сигнала
Л*,,
то обратная
[вязь называется отрицательной По характеру действия обрат-
_:е связи подразделяются на жесткие, гибкие и нелинейные об-
!ые связи с юной нечувствительности, которые иначе назы-
:я связями с отсечкой'. Назначение и принцип действия наи-
"ее часто применяемой в технике электропривода жесткой от-
рицательной обратной связи по скорости рассмотрено в гл.5.
Если образная связь действует только во время переходных
цессов, то такая обратная связь называется гибкой Fx л и об-
тая связь начинает действовать только с определенного уров-
регулируемого параметра У, то такая обратная вязь называется
ержанной или обратной связью с отсечкой. Жесткие обра пиле
язи п обратные связи с отсечкой используются, в первую оче-
Ьдь, для формирования статических характеристик элекзропрл-
да. Кроме того, жесткие и особенно гибкие обратные связи
применяются для обеспечения устойчивости системы регулиро-
1ня и получения желаемых динамических показателей, харак-
шзуюших протекание переходных процессов при воздействий
систему сигналов задания Л" и возмущения/
14.3. Классификация замкнутых систем регулирования
Замкнутые системы электропривода классифицируются по
тедуюшим признакам: по принципу действия, по выходной ре-
|упнруемой координате или по выполняемым функциям.
Классификация по принципу действия
По принципу действия системы регулирования автоматизи-
рованные электроприводы классифицируются следующим обра-
зом.
1. Системы электропривода с непрерывным управлением.
2. Системы электропривода с релейным управлением.
3. Системы электропривода с импульсным управлением.
4. Системы электропривода с цифровым (например, микро-
процессорным) управлением.
Системы электропривода с непрерывным управлением. Это
такие системы, в которых каждый из переменных параметров
(координат) непрерывно изменяется во времени или остается по-
стоянным. Функциональная схема такой системы соответствует
рис.
14.2.
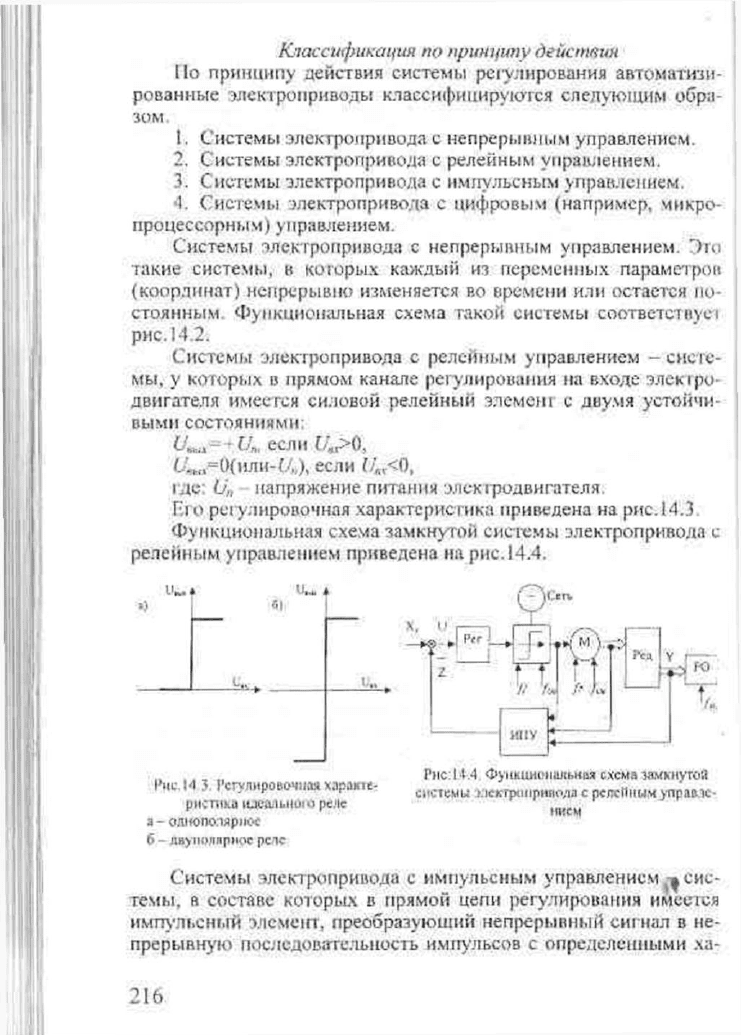
Системы электропривода с релейным управлением - систе-
мы, у которых в прямом канале регулирования на входе электро-
двигателя имеется силовой релейный элемент с двумя устойчи-
выми состояниями:
• CL если UJ>О*
£/»ю
в
0(или-(/Д если (/„<О,
где: U„ напряжение питания электродвигателя.
Его регулировочная характеристика приведена на рис.14.3.
Функциональная схема замкнутой системы электропривода с
релейным управлением приведена на
рис.
14.4.
0
Ст
, „ „ Рис: МА Функциональная схсма замкнутой
Рис. И 3. регулировочная харшп*
сис
„
ми
,;
1СКГршфИаолд с
р^т.имупрш*
рнстика идеалмино pe.'le
а - олнополяриос
б - лвуноллрнос реле
Системы электропривода с импульсным управлением ^сис-
темы. в составе которых в прямой цепи регулирования имеется
импульсный элемент, преобразующий непрерывный сигнал в не-
прерывную последовательность импульсов с определенными ха-
геристиками. Наиболее распространены два типа импульсных
:разователей:
- амплитудно-импульсный модулятор (ДИМ), формирующий
дедователыюсгь импульсов с переменной амплитудой и с ио-
нными периодом и длительностью;
- широгно-импульсный модулятор (ШИМ), который форми-
гг последовательность импульсов с переменной длительностью
С достоянными периодом и амплитудой
Цифровые системы регулирования - это такие системы, в ко-
:ых переменные преобразуются в цифровой код. Цифровые
^ггемы в настоящее время создаются на базе микропроцессоров,
изуюших в цифровой форме функции регулятора Р и ннфор-
ионно-иреобразовательного устройства (ИПУ).
Классификация по выходным регулируемым координатам
По типу выходной регулируемой координаты замкнутые
1стемы электропривода подразделяются на следующие группы.
Системы регулирования момента (усилия). К этому классу
сятся, например, электроприводы систем натяжения металла
[листопрокатном производстве в металлургни или системы на-
;ения пленки в химико-технологическом производстве тонких
JHOK. Закон регулирования момента (усилия) рабочего органа
•деляется технологическим процессом.
Системы регулирования скорости. Они используются в элек-
*иводах многих технологических машин: металлообрабаты-
нх станках, прокатных станах и многих других. Системы
лирования скорости делятся на дне большие группы.
Системы стабилизации скорости, у которых скорость под-
живается постоянной, несмотря на воздействие возмущений,
таким системам относятся, например электроприводы бумаго-
резательных машин.
Системы управления скоростью, у которых скоросгь рабоче-
органа регулируется с высокой точностью в широких пределах
i соответствии с требуемым характером протекания технологи-
жого процесса. Это, например, электроприводы экскаваторов,
;дъемно-зраиспортных машин и другие.
Системы регулирования положения рабочего органа. Эти
нстемы используются в электроприводах нажимных винтов про-
ных станов, в роботах и манипуляторах и многих других про-
шлеипых установках В этих системах положение рабочего
гана регулируется с заданной точност ью в соответствии с тре-
ваниями технологического процесса. Существует два типа
замкнутых систем электропривода регулирования положения -
системы позиционирования и следящие системы.
Системы позиционирования - это такие системы, в которых
задается исходное и конечное положение рабочего органа, а тра-
ектория перемещения не контролируется.
Следящие системы электропривода - это системы регулиро-
вания положения, в которых задается и непрерывно контролиру-
ется вся траектория движения рабочего органа. Рабочий орган
должен повторять заданную траекторию с требуемой точностью.
Классификация по выполняемым функциям строится в соот-
ветствии с характером и особенностями технологического про-
цесса. При этом все замкнутые системы электропривода делятся
на следующие группы
1. Системы стабилизации регулируемой координаты (мо-
мента, скорости и т.п.) в установившемся и переходных режимах
Основная особенность таких систем - это постоянство сигнала
задания регулируемой координаты в течение продолжительного
времени. Фактическое значение регулируемой координаты оста-
ется постоянным, несмотря на воздействие возмущений
2. Следящие системы электропривода
-
это такие замкнутые
системы регулирования положения, у которых сигнал задания
изменяется но произвольному, заранее неизвестному закону.
Следящие системы применяются в электроприводах копнровадь-
но-фрезерных станков, в системах наведения радиолокационных
станций, которые работают в режиме слежения за летящими и
при этом маневрирующими объектами
3. Системы с программным управлением - это такие систе-
мы. в которых при выполнении технологического процесса сиг-
нал задания и регулируемая координата изменяются по заданно-
му закону, заложенному в программное устройство. Системы
электропривода с числовым программным управлением находят
применение в приводах подач металлорежущих станков.
4. Адаптивные системы - это такие замкнутые системы ре-
гулирования. в которых автоматически выбираются целесообраз-
ные режимы работы электроприводов в зависимости от конкрет-
ной технологической ситуации и условий работы промышленно-
го объекта.
14.4. Показатели качества регулирования
Качество процесса регулирования - это совокупность пока-
зателей, характеризующих поведение системы электропривода в
рпшовившихся и переходных режимах при отработке задающих
змущающнх воздействий.
Качество системы регулирования в установившемся режиме
ливается по величине отклонений регулируемой координаты
[заданного значения. Для этого вводится понятие статизма.
нзм - это относительное установившееся отклонение регу-
уемой координаты системы электропривода от заданного зна-
ла при отработке сигнала задания или компенсации возмуще-
ния.
п Статизм от воздействия сигнала задания определяется соот-
Вшением:
У -У
S, = ~—— 100%.
Щри отсутствии всех возмущений.
где
-
К,
- заданное значение регулируемой координаты;
У
0
- установившееся значение регулируемой координаты
ьекта.
Статизм от воздействия возмущения определяется соотно-
шением
Го-У.
100%.
где:
У/
- установившееся отклонение выходной координаты
Й1ри
заданной величине возмущения.
Суммарный статизм системы электропривода определяется
том мои:
где: статизм от возмущения по моменту сопротивления.
Кус - статизм от возмущения по напряжению сети; Siu - статизм
[рТ возмущения по напряжению возбуждения; S
T
-статизм от воз-
Г
щення по температуре.
Если статизм по какому-либо воздействию равен нулю, то
система регулирования является астатической относительно это-
[го воздействия.
Установившаяся величина регулируемой координаты может
(ьггь найдена из системы уравнений, описывающих статический
жим работы системы или с помощью передаточной функции
кнутой системы по рассматриваемому воздействию
Установившееся значение выходной координаты при отра-
кс сигнала задания определяется из уравнения
v
5
при р-«О
Установившееся отклонение выходной координаты при ком-
пенсации возмушения определяется из уравнения
у Г =/(р)'Щр),^>
прр р~*(1
где: fViPh^y ' передаточная по сигналу задания.
Щр)/->,
-
передаточная функция по возмущению
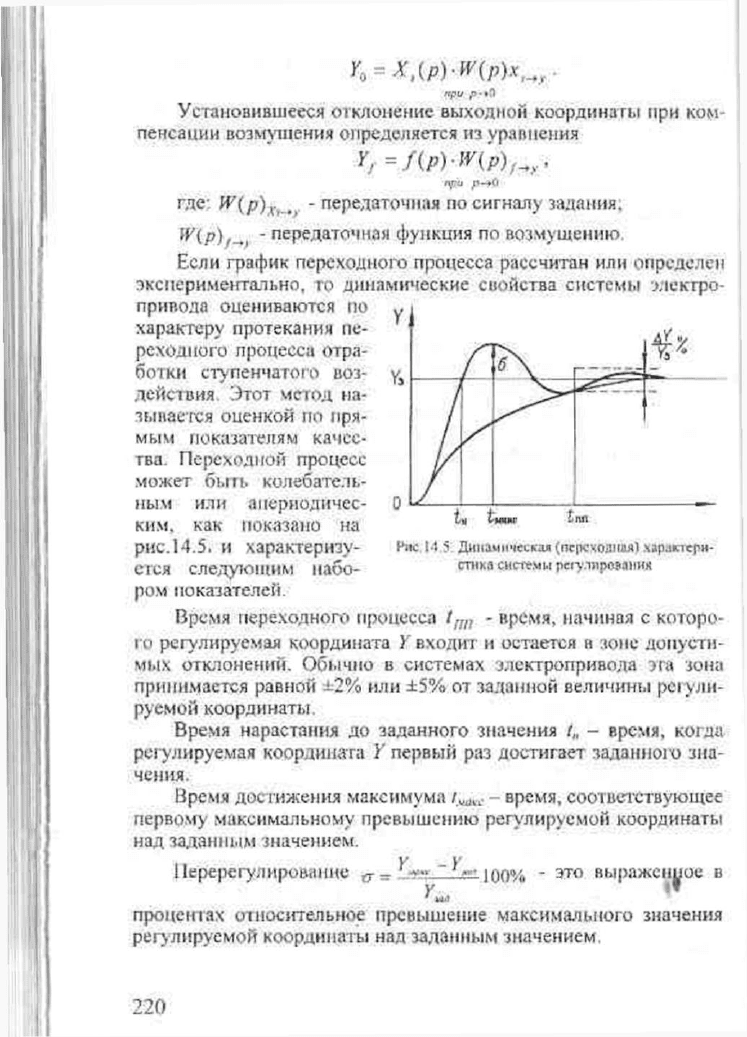
Если график переходного процесса рассчитан или определен
экспериментально, то динамические свойства системы электро-
привода оцениваются по у
характеру протекания пе-
реходного процесса отра-
ботки ступенчатого воз-
действия Этот метод на-
зывается оценкой по пря-
мым показателям качес-
тва. Переходной процесс
может быть колебатель-
ным или апериодичес-
ким. как показано на
рис. 14.5.
и характеризу-
ется следующим набо-
ром показателей.
Время переходного процесса t
nn
-
время, начиная с которо-
го регулируемая координата Y входит и остается в зоне допусти-
мых отклонений. Обычно в системах электропривода эта зона
принимается равной ±2% или ±5% от заданной величины регули-
руемой координаты.
Время нарастания до заданного значения /„ - время, когда
регулируемая координата Y первый раз достигает заданною зна-
чения.
Время достижения максимума - время, соответствующее
первому максимальному превышению регулируемой координаты
над заданным значением.
Перерегулирование
ty twtw
tnn
hie 14.5". Динамическая (переходная! характери-
стика системы регулирования
100% " ЭТО вы
ражен^ ое в
процентах относительное превышение максимального значения
регулируемой координаты над заданным значением.