Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.


JP)un -*/ =
—•
OurKrP'
MT* fiT'P-
+ '
K
T "iг (p)
(15.4)
где: 0
2Г
{р)
=
а^Т
/Л
p +а
ш
7'рР+
1
- характеристический
ином передаточной функции контура, настроенного на МО.
•Передаточная функция по сигналу ошибки регулирования
Г(Л
_ "trip) _
<*ю
т
*>-Pl
T
*P+
и,r(P)
Огт(р)
(15.5)
[.Числитель этой передаточной функции содержит сомножи-
оператор р в первой степени. Следовательно, контур тока
астатизм первого порядка относительно сигнала задания
При ступенчатом сигнале и
3
т установившаяся ошибка peiy-
вання тока ug?
}xm
=G, так как при /7-Я) usrym стремится к ну-
в установившемся режиме | и^т\
=
I
м«-г1.
>эффициент обратной связи по току рассчитывается из со-
шен и я
,, _
U
ITM«kc
Т
" /
.чакс.дрч
(.где: ы,г».вм?~8В - для серий-
1
операционных усилителей с
м возможных перерегу-
ваний.
'{мах лог. - максимально до-
1ЫЙ
ток якоря.
ПИ-регулятор тока обычно
устся на операционных
R-х' Сап
,4=1-11-1
РисЛ
5 < С*ем» НИ-pery.iiircs^i
шз
Л.
)цлителях по схеме рис. 15.4. Для этой схемы К
рю
-ЯосСсс
15.3
Синтез контура скорости, настроенного на МО
Если требуется, что система регулирования скорости имела
азон регулирования скорости до /)
а>
=50:1 и сравнительно
хокую точность, то целесообразно контур скорости настраи-
ь на МО, так как в этом случае электропривод будет иметь
шие динамические показатели качества.
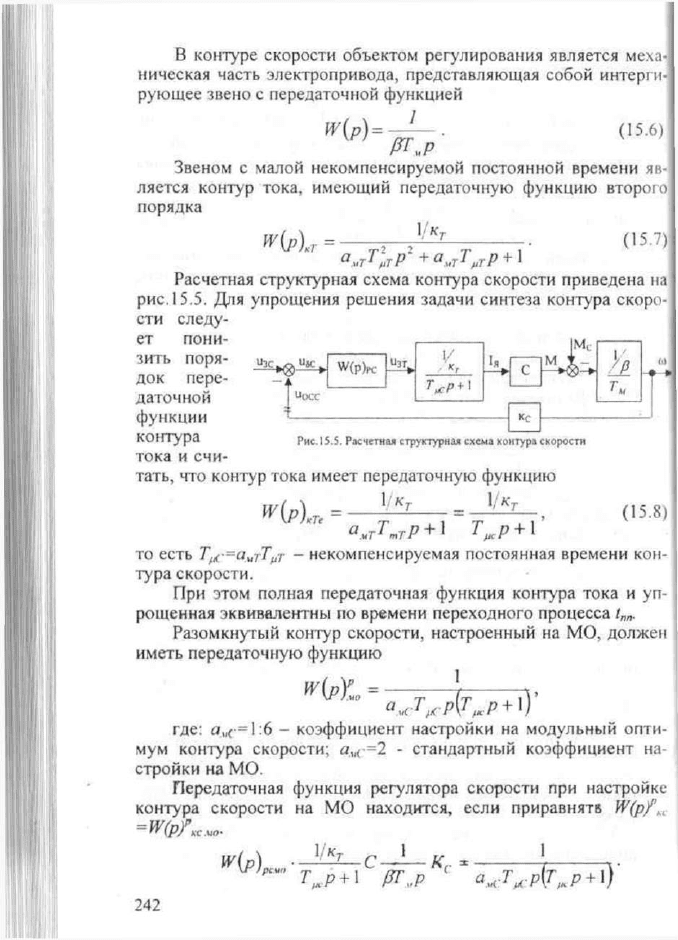
В контуре скорости объектом регулирования является меха-
ническая часть электропривода, представляющая собой интерги-
рующее звено с передаточной функцией
(15.6)
ЩмР
Звеном с малой некомпенсируемой постоянной времени яв-
ляется контур тока, имеющий передаточную функцию второго
порядка
Мк
т
W{p\
T
=
(15.7)
а
,,т
Т
1тР
2
+
а
мт
Т
„гР + 1
Расчетная структурная схема контура скорости приведена на
15.5. Для упрощения решения задачи синтеза контура скоро-
следу-
Рис.15.5. Расчетная структурна» схема контура скорости
рис
сти
ет пони-
зить поря-
док пере-
даточной
функции
контура
тока и счи-
тать, что конту р тока имеет передаточную функцию
W(p\
Tt
= У* «J&-(15.8)
а»т
т
»тР +1
7>
+ 1
то есть Т
(
ц-=и
м
тТ
ц
т - некомпенсируемая постоянная времени кон-
тура скорости.
При этом полная передаточная функция контура тока и уп-
рошенная эквивалентны но времени переходного процесса t
nn
.
Разомкнутый контур скорости, настроенный на МО, должен
иметь передаточную функцию
w
{pY»o
=
—~—TZ——л»
где: а,,с= 1:6 - коэффициент настройки на модульный опти-
мум контура скорости; а„
(
=2 - стандартный коэффициент на-
стройки на МО.
Передаточная функция регулятора скорости при настройке
контура скорости на МО находится, если приравнятв W(pf
M
= W(pf
KCMn
.
Следовательно, регулятор скорости должен иметь переда-
ю функцию
*r(p)^=
K
f
M
T
(15.9)
а
мс
С к
с
Т^
Таким образом, для настройки контура скорости на МО сле-
применять П-регулятор с коэффициентом усиления КJ*
.9).
Передаточные функции контура скорости по задающему
сйствию при настройке на МО имеют следующие выражения
,
1
- —(15.10)
"с а«с
т
1сР
2
+ <**сТ>сР + 1
d
ic(P)
'
где: D
u
(p)
= а
мс
Т
2
)К
.р
:
+
a
M
T
fli
.p
+ 1
- характеристический
WIOM второй степени передаточной функции контура скоро-
\ настроенного на МО,
,)
=
£—(15.11)
Ск
с
D
u
(p)
М.
4-^.(15.12)
jL>l/_-+M ~ г\ ( V
If «С
D
lc\P)
Передаточные функции
f5.ll),
(15.12) отличаются толь-
масштабными Коэффициен-
ты И.
Установившиеся значения
дходных координат
со.
I, М на-
гся из передаточных функ-
Ш (15.10), (15.11), (15.12)'при
|ю.
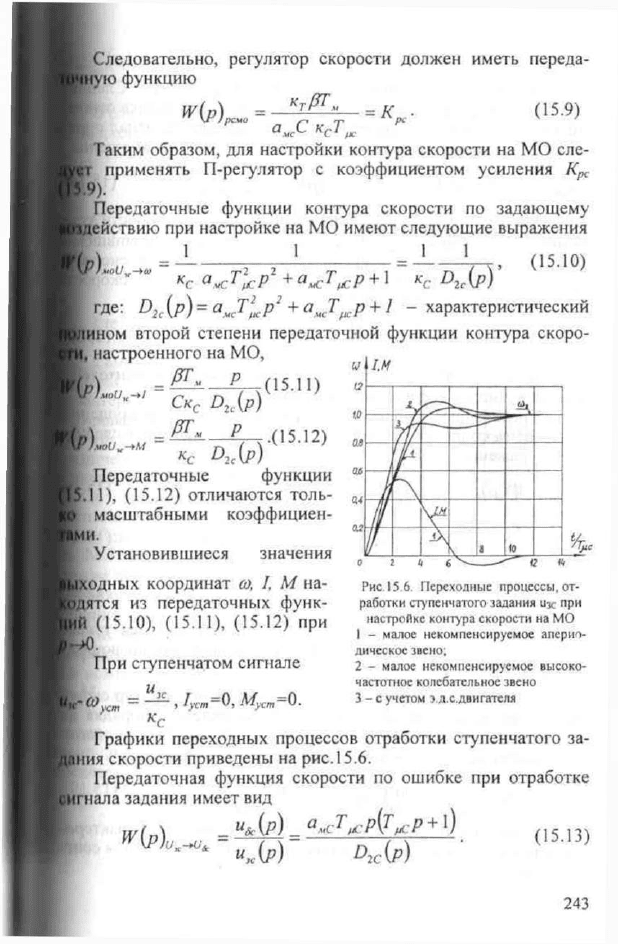
[ При ступенчатом сигнале
Г ^ст
=
—
. Iycm=0, M
ycm
=0.
Рис 15 6. Переходные процессы, от-
работки ступенчатого задания и
зс
при
нас тройке контура скорости на МО
1 - малое некомпеисируемое аперио-
дическое звено.
2 - малое некомпенсируемос высоко-
частотное колебательное звено
3-е учетом э.д.с.двигателя
Графики переходных процессов отработки ступенчатого за-
_)шия скорости приведены на рис. 15.6.
Передаточная функция скорости по ошибке при отработке
|Мгнала задания имеет вид
- Us)-
и
М D
2C
{P)
(15.13)
Числитель передаточной функции по ошибке W(p\,
содержит сомножителем оператор р в первой степени. Следова-
тельно, контур скорости имеет астатизм первого порядка относи-
тельно сигнала задания скорости. Установившийся сигнал ошиб-
ки регулирования скорости при
р~Н>
нахолится из соотношения
«W. - »МГ(РК-** = ^^^
(1514!
При отработке ступенчатого сигнала задания скорости уста-
новившаяся ошибка Следовательно, в установившемся
режиме при отработке ступенчатого сигнала задания скорости
Поэтому коэффициент обратной связи по скорости
рассчитывается из соотношения
=
(,515)
% <*„
где: «„чип -SB - для серийных операционных усилителей с
учетом возможных перерегулирований.
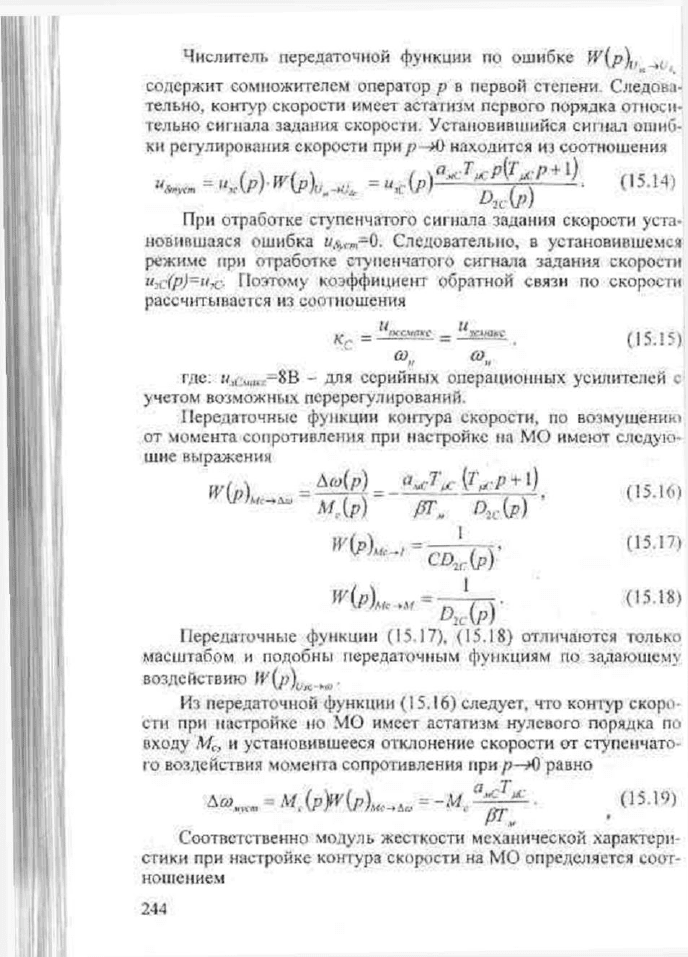
Передаточные функции контура скорости, по возмущению
от момента сопротивления при настройке на МО имеют следую-
щие выражения
( )
_ Ыр) __(r^P
+
l)
(]516
С D
lc
(p)
HA^-^rVv <
15Л8
>
D
K
\P)
Передаточные функции (15.17), (15.18) отличаются только
масштабом и подобны передаточным функциям по задающему
воздействию W(p\
K
Из передаточной функции (15.16) следует, что контур скоро-
сти при настройке но МО имеет астатизм нулевого порядка по
входу М
С}
и установившееся отклонение скорости от ступенчато-
го воздействия момента сопротивления при р—>0равно
Д*^
=
К (рШ,^
=
-К ^
•
Соответственно модуль жесткости механической характери-
стики при настройке контура скорости на МО определяется соот-
ношением
равнение механической характеристики сисгемы регулиро-
£ скорости при настройке кожура скорости на МО
= = = (15.20)
*с Рмо
к
с
тизм по моменту сопротивления при настройке системы
•лирования скорости на МО вычисляется из соотношения
где: =
К
- заданная скорость электропривода.
Замый большой статизм
ёма имеет на нижней
ристике диапазона ре-
вання. Величину этого
ма обычно указывают в
еских данных системы
"привода Поэтому с
зрения возможного
зона регулирования еко-
JH система с настройкой
> имеет сравнительно
показатели и соотве-
яно ограниченное прн-
jHne.
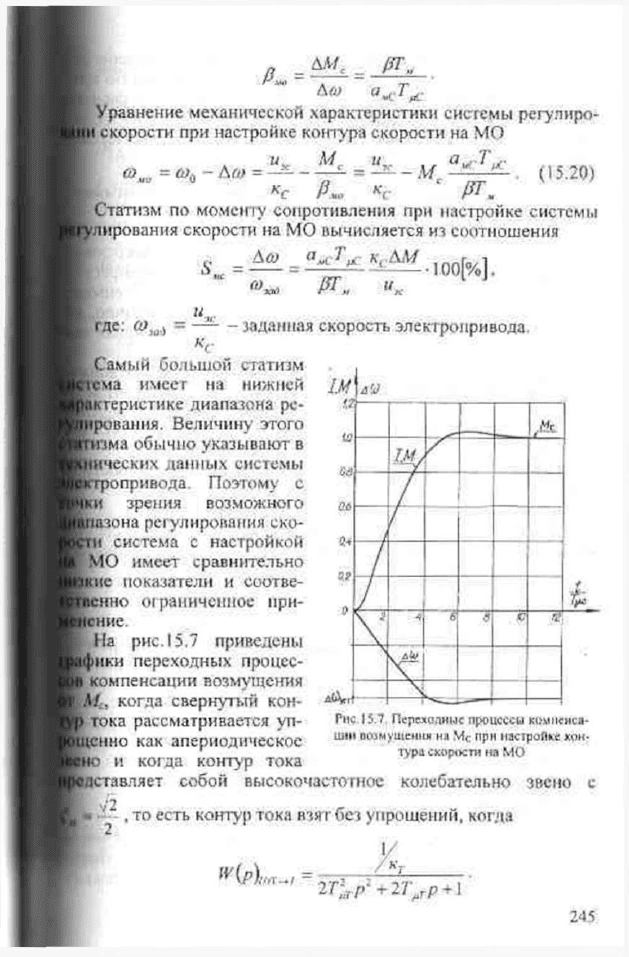
рис. 15.7 приведены
Ьнкн переходных процсс-
:мпенсации возмущения
когда свернутый кон-
тока рассматривается уп-
нно как апериодическое
и когда контур тока
пвляет собой высокочастотное
Щ
2
Рис. 15.7 Переходные процессы компенса-
ции воамушенн* ни ,Мс при настроПкс хрн-
тура скорости на МО
колебательно звено с
. то есть контур тока взят без упрощений, когда
I/
/
к
т
Из этих графиков видно, что в реальной системе псрсрсгулн
рование и время переходного процесса увеличиваются по срав-
нению с у прошенным вариантом. Нел и к тому же в расчетах
учесть влияние внутренней обратной связи по э.д.с. в электродви-
гателе, то переходные процессы будут еще больше отличатся от
идеальных, как показано на рис. 15.6.
15.4 Синтез контура скорости, настроенного на CIIMMCI-
ричнын оптимум (СО)
Если по техническим требованиям необходимо реализовать
систему регулирования скорости с большим диапазоном регули-
рования скорости, то контур скорости настраивают на симмет-
ричный оптимум (СО). При этом контур тока, как обычно, на-
страивается на модульный оптимум. Расчетная структурная схе-
ма копту ра скорости приведена на рис. 15.5.
Разомкнутый контур скорости настроенный на СО должен
иметь следующую передаточную функцию
<
l
J#P VW
+ U
где: коэффициент настройки контура скорости на
СО:
- стандартный коэффициент настройки.
Дня облегчения процесса синтеза контура скорости следует
использовать упрощенную передаточную функцию свернутого
контура тока вида
W{p\
7
=
VK
r —J&-.
+1
Обычно Т^=2Т
р
т и поэтому передаточная функция регуля-
тора скорости, обеспечивающего настройку на СО, находится из
соотношения W(p/
kC
-Wfp/^^ т.е.
Следовательно, для настройки контура скорости на СО регу-
лятор скорости должен иметь передаточную функцию пропор-
ционально- интегрального звена
'»Р
1
шятора скорости;
постоянная нрсмсни интегрирования
-
*т*р
т
ш
р
- коэффициент усиления регу лятора скорости.
иХема реализации ПИ-регулятора приведена на рис. 15.4.
Им кнуты й контур скорости имеет следующие передаточные
^ции по задающему воздействию
J ^
*с а^р* -ю^р
2
+а
лк
Т
1Л:
р + I
(|5 24)
1 -1
« ~ '
(где- D, (р)
=
aJT^p* + о
ха
Т]..р
2
+
ojr
u
.p
+ 1
харак-
гческнй полином третьей степени передаточной функции
?ра, настроенною на СО
РГ
М
р(4Т
и:
р
+
\)
Ск
с
ЪЛР)
pVT^.p
+
l)
Передаточные фун-
5
1 (15.25). (15.26) от-
ся только маеiii-
ми коэффициента-
ГУстановившиеся зна-
мя выходных коордн-
0). / v. М находятся
низведений переда-
нных функций (15.24),
5), (15.26) при
/7—>
0.
ри ступенчатом сир-
= —'
М
кж
=0. Графики
входных процессов
5отки задающего на-
ряжения и
к
при <»сг
=
8
ДЛР)
(15 25)
(15.26)
W
'•1
_
*i!V
V
i /
/
/
V
'/
I-r-r
1
а»
l/\
....
а»
h
а»
е
\
е
•
*
k
•• aS
t
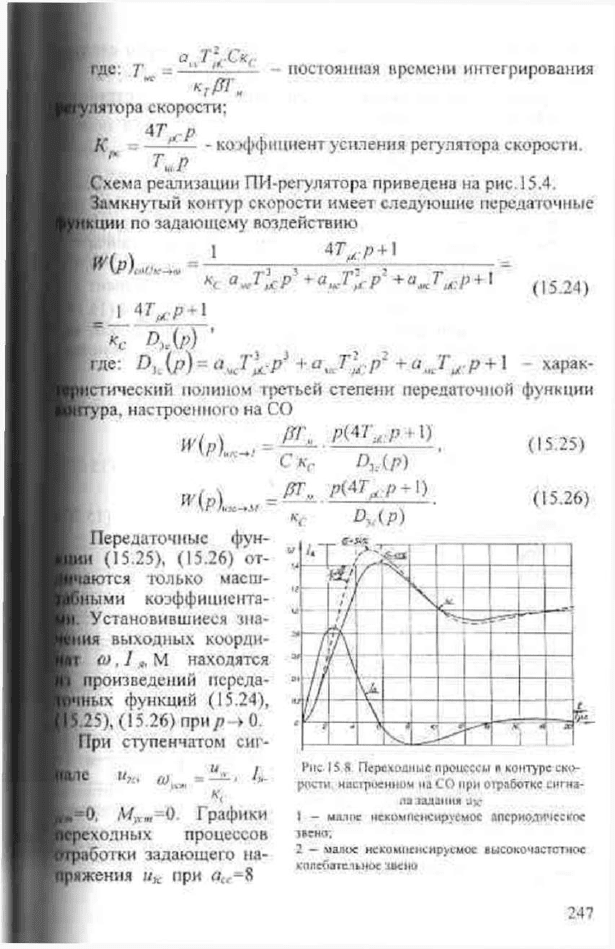
Рис15 8 Переходные процессы п контуре ск<>-
|ИКЛН настроенном на СО при отработке сигна-
ла задания Jv
1
—
малое некомпенснрусмос опсриодичсскос
1»сно;
2 — малое некомпенснрусмос высокочастотное
колебательное JUCHO
приведены на рис. 15.8. Зависимости <o{i) соответствуют следую-
щие показатели качества: /
пл
=16,57"
к
. /
;
,-3,17'^, сг=43%, «,=2.
Ufk при отработке
(15.27)
Передаточная функция сигнала ошибки
сигнала задания имеет вид
Iу („Г
=
i^^M -
а
Г D
1
•
Числитель этой передаточной функции содержит сомножи-
телем оператор р во второй степени Следовательно, контур ско-
рости, настроенный на СО, имеет астатизм второго порядка отно-
сительно сигнала задания скорости. При отработке ступенчатого
сигнала задания скорости и
к
установившаяся ошибка. 0, т.е.
в установившемся режиме »'
л
.= н
кс
Поэтому коэффициент об-
ратной связи по скорости рассчитывается из соотношения (15.15).
Передаточные функции контура скорост
и
по возмущению ог мо-
мента сопротивления при настройке на СО имеют следующие
выражения
0Г
М
DM
1 1-1
DM
*Tg
P:
и
О-Лп)
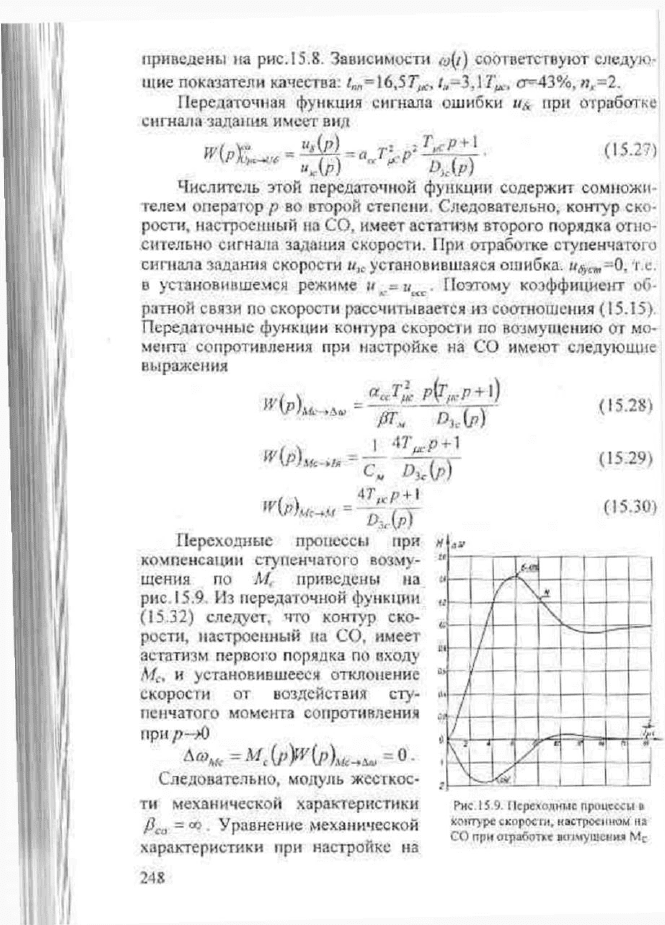
Переходные процессы при
компенсации ступенчатого возму-
щения по А/, приведены на
рис.15:9 Из передаточной функции
(15.32) следует, что контур ско-
рости, настроенный па СО, имеет
астатизм первого порядка по входу
М
с
, и установившееся отклонение
скорости от воздействия сту-
пенчатого момента сопротивления
при
/>->О
Следовательно, модуль жесткос-
ти механической характеристики
Д.
а
= со. Уравнение механической
характеристики при настройке на
«'(PU
'Фк-А,
(15.28)
(15.29)
(15.30)
Рис. 15.9. Переходные процессы и
«чттуре скорое гн, настроенном на
GO при огработае мпмушеиня М
с
= (0
о
-
Асо
(15.31)
рТсредатоФГая функция (15.30) совпадает но виду с переда-
•й функцией \У{р)ц Поэтому динамические показатели
:ва переходного процесса М(1) при отработке возмущения
Jfe же, как у переходного процесса co
Uti
= /(/).
[ля улучшения качества переходных процессов отработки
слов задания скорости рекомендуется на задающем входе
1ать компенсирующее апериодическое звено (фильтр) с пе-
>ЧНОй функцией
*(р)=
АТ
1
(15.32)
[Тогда передаточные функции контура скорости по сигналу
1ия будут иметь вид
1
(15.33)
(15.34)
(15.35)
•*г АЛР)
РГМ р
Ск
с
tijp)
*г
D
M
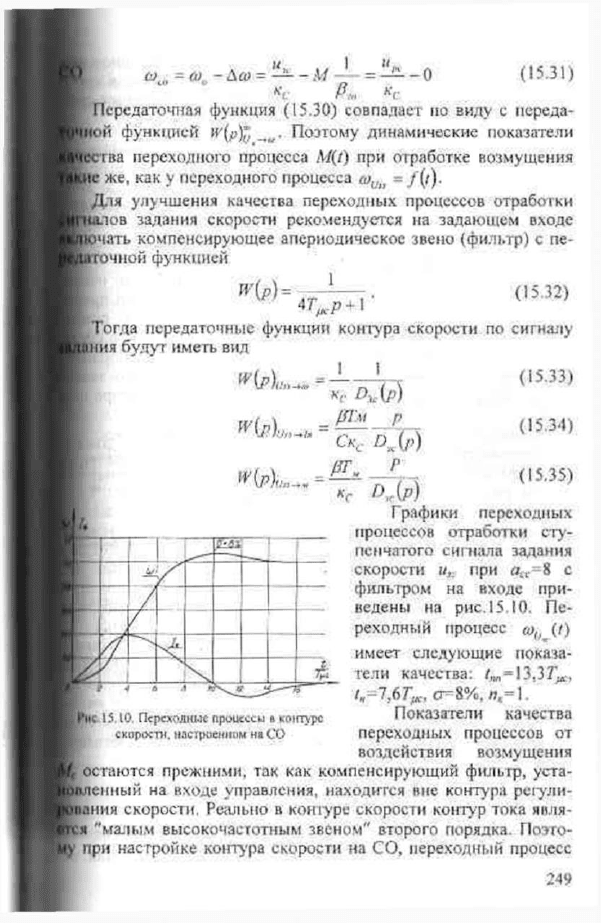
Графики переходных
процессов отработки сту-
пенчатого сигнала задания
скорости и
л
. При Я^=8 с
фильтром на входе при-
ведены на рис.15.10. Пе-
реходный процесс (о
()
(/)
имеет следующие показа-
тели качества:
/,„ =
13,37^,
',=7,6Г^, сг-8%. л,= 1.
Показатели качества
переходных процессов от
воздействия возмущения
гаются прежними, так как компенсирующий фильтр, уста-
вный на входе управления, находится вне контура регули-
шия скорости, Реально в котуре скорости контур тока явля-
"малым высокочастотным звеном" второго порядка. Поэго-
при настройке контура скорости на СО, переходный процесс
.15.10, Переходные процессы
п
контуре
скорости, настроенном
на
СО
имеет показатели качества несколько хуже, чем в идеальном слу-
чае. как показано на рис. 15.8. Однако с этим приходится согла-
шаться. чтобы достигнуть требуемых больших диапазонов регу-
лирования скорости до D„= 10000:1 и более.
15.5. Ограничение тока якоря в двухконгурных системах
регулирования скорости
По техническим условиям ток якоря не должен превышать
допустимого значения /<*,„, которое для общепромышленных се-
рий двигателей составляет (2+4)l
w
. Это ограничение определяет-
ся условиями коммутации тока на коллекторе.
При отработке больших сигналов задания скорости, напри-
мер при пуске, ток якоря двигателя может многократно превы-
шать допустимое значение. Чтобы этого не происходило, прини-
мают специальные меры по его ограничению. Для этого в систе-1
мах электропривода с подчиненным регулированием координат
используют ограничения сигнала задания тока и
т
. Это задача
решается путем ограничения сигнала на выходе регулятора ско-
рости
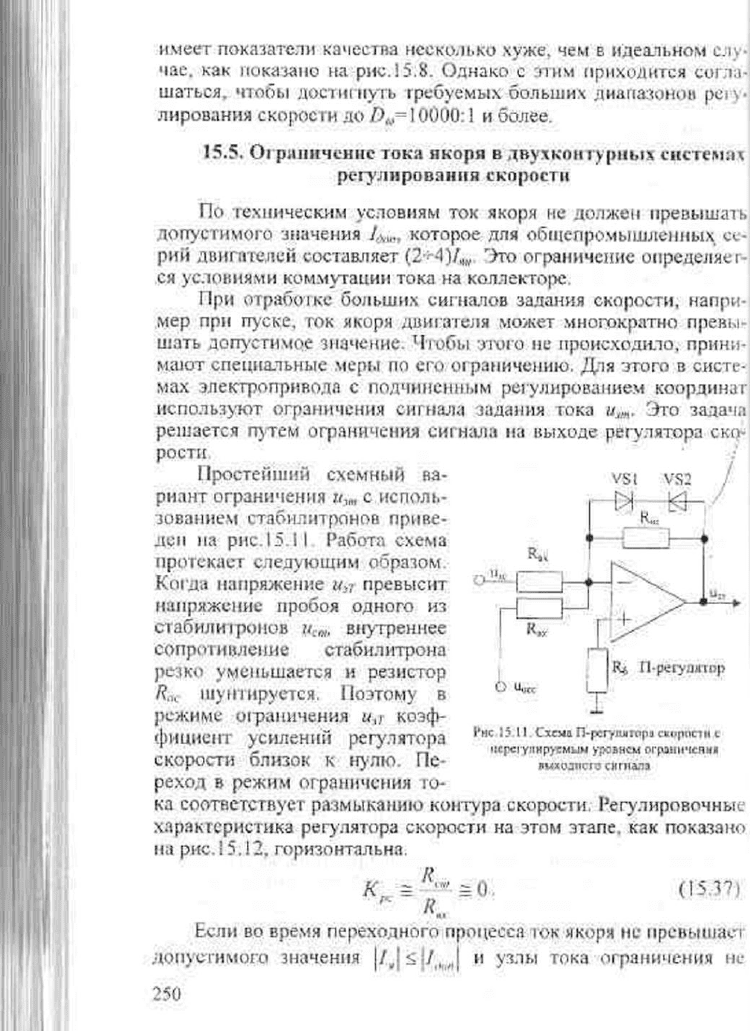
Простейший схемный ва-
риант ограничения щ
т
с исполь-
зованием стабилитронов приве-
ден на рис. 15. II Работа схема
протекает следующим образом.
Когда напряжение u
3
i превысит
напряжение пробоя одного из
стабилитронов и
ст
, В1сутрениее
сопротивление стабилитрона
резко уменьшается и резистор
Rac шунтируется. Поэтому в
режиме ограничения коэф-
фициент усилений регулятора
скорости близок к нулю. Пе-
реход в режим ограничения то-
ка соответствует размыканию контура скорости. Регулировочные
характеристика регулятора скорости на этом этапе, как показано
на рис. 15.12. горизонтальна.
= =0 (15,3?)
F %
Если во время переходного процесса ток якоря не превышает
допустимого значения |/J<|/
((fi
„| и узлы тока ограничения не
1'ис J5.11 Схема П-регуимгора скорости с
нерегулируемым уровнем ограничения
вихолчеге сигнала