Онищенко Г.Б. и др. Автоматизированный электропривод промышленных установок
Подождите немного. Документ загружается.

Число колебаний w. равно числу переходов регулируемой
рдннаты через установившееся значение за время переходнр-
щесса t
wl
.
Иногда при опенке динамических свойств систем электро-
вода могут использоваться дополнительные показатели.
В отдельных случаях для оценки динамических свойств сис-
ы регулирования используют интегральные оценки качества,
вная идея, Заложенная в таких оценках, состоит в том, чтобы
гризовать процесс регулирования одним числом, по велн-
е которого можно было бы сделать определенные выводы о
;кании переходного процесса в течение заданного интервала
ени. Подобного вида оценки называются функционалами
ства. Они записываются в виде
/
= \F{fit))dt.
Из этого выражения следует, что численное значение J
Q
оп-
]еляется видом функции Г, характером протекания во времени
»емого параметра /('() и интервалом времени протекания пе-
>дного процесса [0.1] В качестве изучаемого парамсфа f(t)
и определении интегральных оценок Л обычно используется
дная составляющая переходного процесса, определяемая из
ошення
где: Y
<tl
(f) - свободная составляющая;
- установившееся значение регулируемого параметра;
Y(l) - переходный процесс изменения изучаемого параметра
Свободная составляющая Y
c
Jt) но существу представляет со-
ошибку системы регулирования во время переходного про-
са.
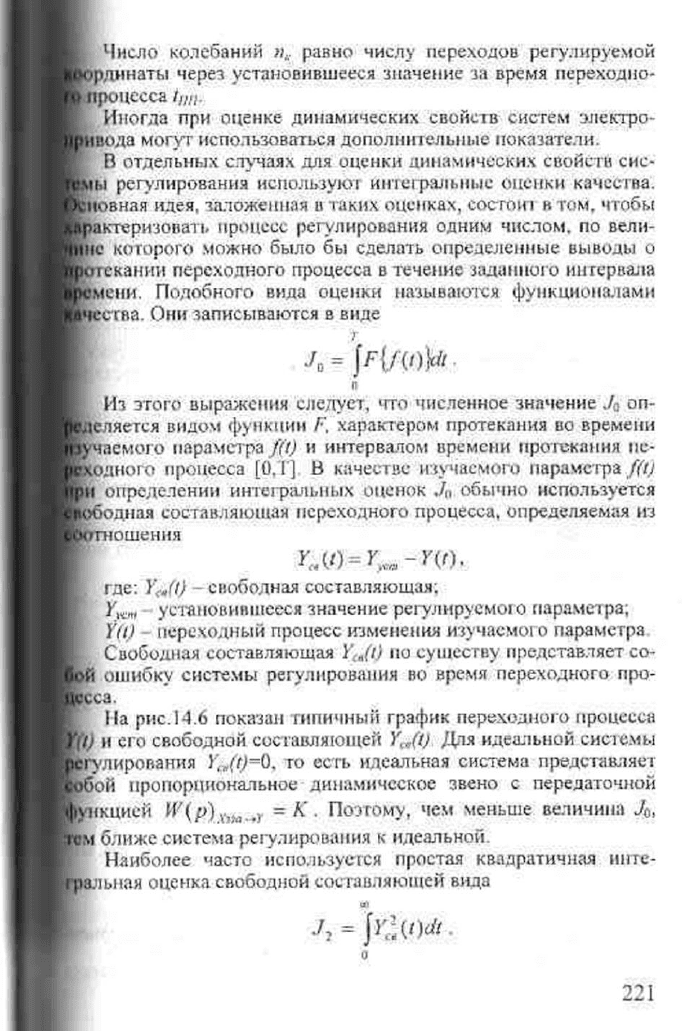
На
рис.
14.6 показан типичный график переходного процесса
t) и его свободной составляющей Y„(t) Для идеальной системы
/лирования Yfr(t)=0, то есть идеальная система представляет
"ой пропорциональное динамическое звено с передаточной
кцией - %
•
Поэтому, чем меньше величина Jo,
м ближе система регулирования к идеальной.
Наиболее часто используется простая квадратичная ннте-
1ьная оценка свободной составляющей вида
J, = •
Чем меньше буди i
сумма абсолютных во
лнчнн гшошадей между
Y\{t) и осью времени
на рис. 14.6, тем меньше
будет величина J, и тем
выше будет быстродейс-
твие системы регулиро-
вания. Однако при этом
перерегулирование и
число колебаний могут
быть достаточно боль-
РйсН
6. Графики перехойного
npouccci-Yw
и
шим
«- *ТЬ простая
«о
ембодноп
составлмюшеяY
ci
<t) квадратичная оценка не
несет в себе достаточ
ной информации о качестве процесса регулирования.
Для того, чтобы иметь более точную характеристику* дина-
мических свойств системы в подынтетральное выражение квад-
РШг
ратичнон оценки вводят слагаемое i —--- . учитывающее квад-
V )
рат скорости протекания переходного процесса. В результате
комбинированная квадратичная интегральная оценка будет опре-
деляться соотношением
л
Лх =
|И«+г
г
ю
!
к'-
где
1
< г - постоянная времени оптимальной экспо
6 3
ненты;
tnr ~ требуемое время переходного процесса.
Этот интеграл преобразуется к виду
2
d/ + rv?m
Комбинированная квадратичная оценка будет достигать ми-
нимального значения, равного
Л, =^,(0). "
если переходный процесс будет близок к оптимальной экспонен-
те с постоянной времени г.
14.5. Статические характеристики электропривода с
замкнутой по скорости системой управления
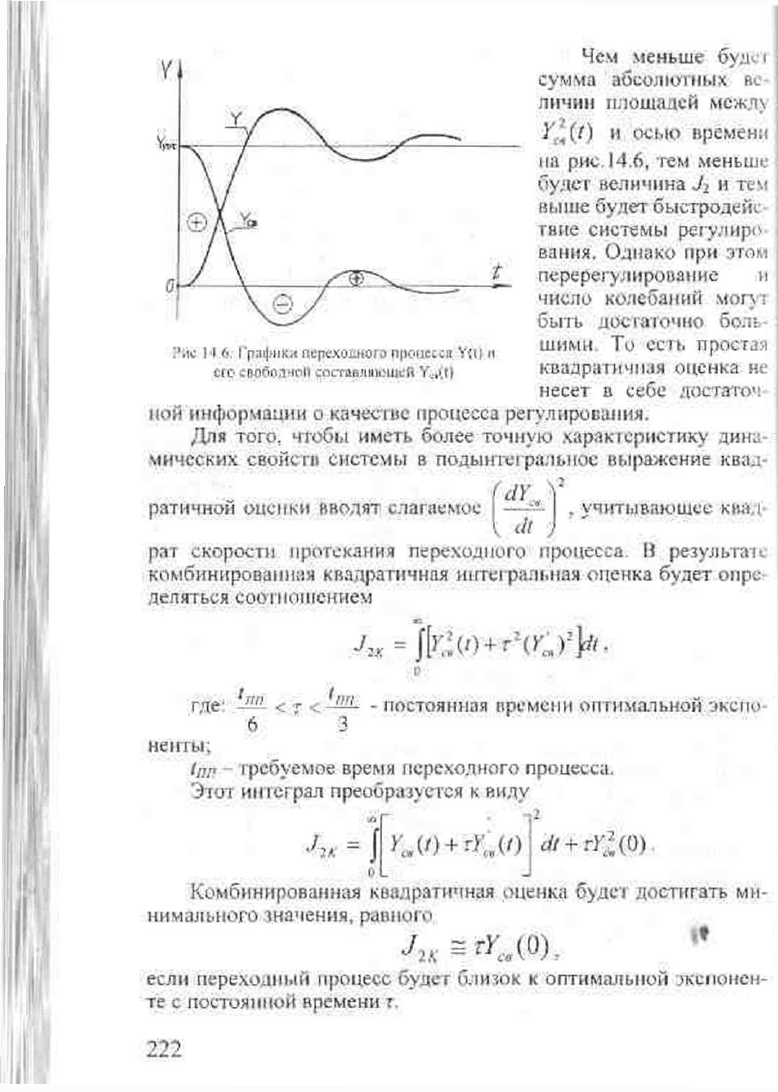
Функциональная схема электропривода постоянного тока по
Kicml- ТП-Д с обратной связью по скорости приведена па
р.
1-1.7
Уравнение механических характеристик для этой сис-
ы по аналогии с (6.11) будет:
t
М E
d
М
/|1И
/геи». / tufoc
J
где: (On, - скорое
i
ь холостого хода в замкнутой системе ре-
агирования;
- жесткость механических характеристик в замкнутой
:ме управления;
К-э.д.с. преобразователя, пи тающего якорную цепь двигателя.
Р) Сеть
Как было по-
казано в §5.1. в
системах управле-
ния с отрица-
тельной обратной
связью по скорос-
ти жесткость ме-
ханических харак-
теристик fi
Muy
уве-
личивается по
сравнению с жест-
костью харакгери-
в разомкнутой системе /? в (J • К) раз (см.5.8), где К - коэф-
Ащнент усиления разомкнутой системы. Для рассматриваемой
ы этот коэффициент будет
,
I
'V 7
Функциональна*
схема снс(Смм ТН-Дс
oipitua-
1С11Ы1иП
обрати
сшимо ПО
скорости
К
_ *>«*«.
Здесь
1
к
у
-коэффициентусиления усилителя;
К
п
= - ' - коэффициент усиления преобразователя;
и.
(14-2)
к. =——-
-
коэффициент обратной связи по скорости;
(О
С=кФ- машинная постоянная (см.6.6).
Электропривод по рассматриваемой схеме описывается сле-
шей системой уравнений
tiy u
K
u,
Srf -
K
y
K
nUy
- К..0)
Ej = С со* I
M
R
(14.3)
*«f
М = С'1
Я
Решая уравнения (14.1) и (14.3) с учетом (14.2) относительно
(у, получим выражение для механических характеристик привода
в замкнутой системе
со
= —
у
. (14.4)
C(l^tf) /?(1+Я)
Механические характеристики и принцип их формирования
в замкнутой по скорости системе управления представлена на
рис.5.5. Из (14.4) следует, что для увеличения жесткости механи-
ческих характеристик нужно увеличивать коэффициент усилении
к\ что может достигаться увеличением коэффициента усилителя
к
у
. Прн лг
(
—>ог механические характеристики привода будут аб-
солютно жесткими (/?
JJ4(
.
>
'X?) и их уравнение будет со
—
.
/
К
с
При конечных значениях var жест кость механических ха-
рактеристик замкнутой системы будет определяться величиной
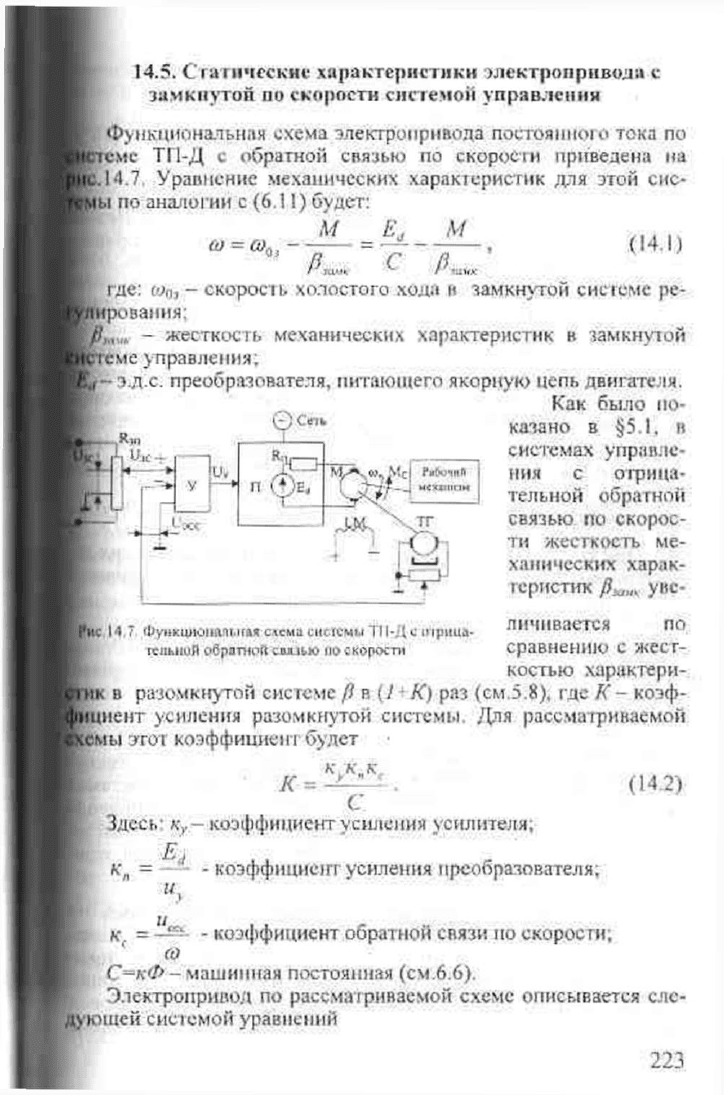
Обычно по условиям эксплуатации технологических устано-
вок необходимо ограничивать максимальный момент, развивае-
мый двигатс-
'~
Сстъ
лсм, на уровне
(2-3 Ж С этой
целью в замкну-
тых системах
электропривода
применяется за-
держанная отри-
цательная об-
ратная ешь по
гоку якоря, на-
зываемая токо-
вой отсечкой. Функциональная схема электропривода постоянно-
го тока с отрицательной обратной связью по скорости и токовой
отсечкой приведена на рис. 14.8. Токовая отсечка в этой схеме
224
Рйс И S Функциональная схема системы ТП-Д с итринв-
гсиммй обратной связью но старости и отссчкнй потоку
изована на стабилитронах VS1 и VS2. Уравнения цепи об-
ой связи по току будет:
0. если |/J
<
]
>тк
1
ШС
- ток якоря, при превышении которого вступает в дейст-
отрицательная обратная связь по току.
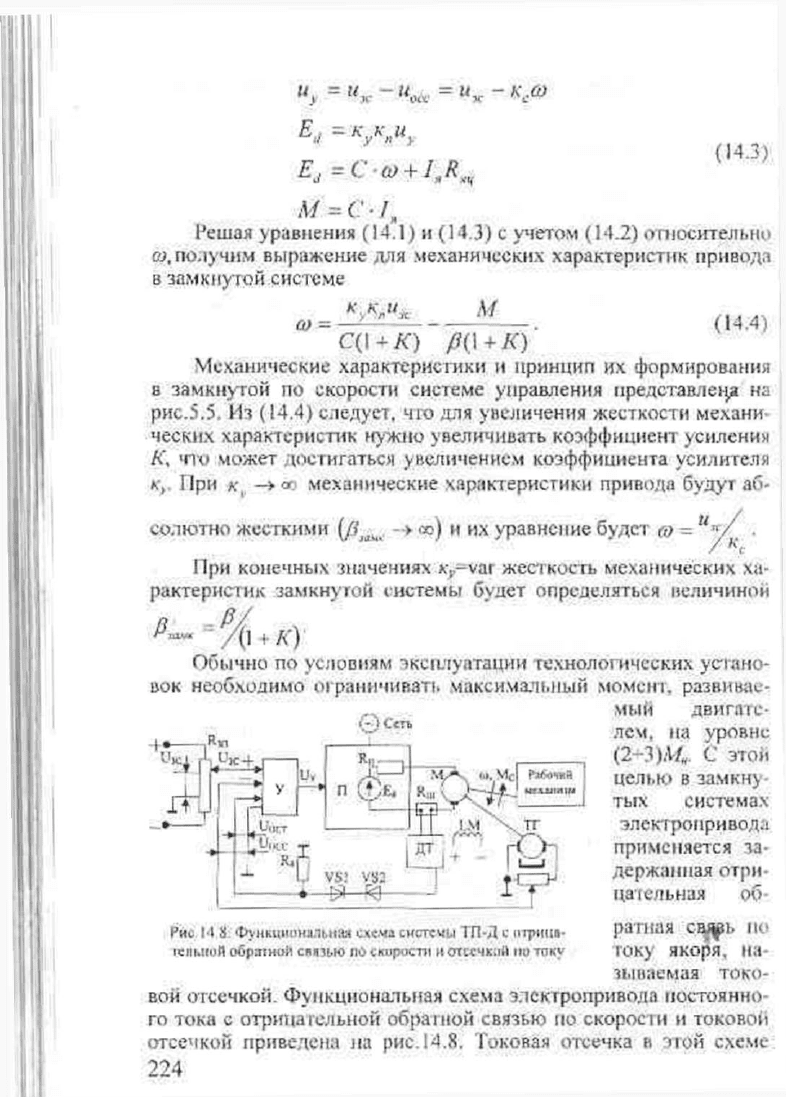
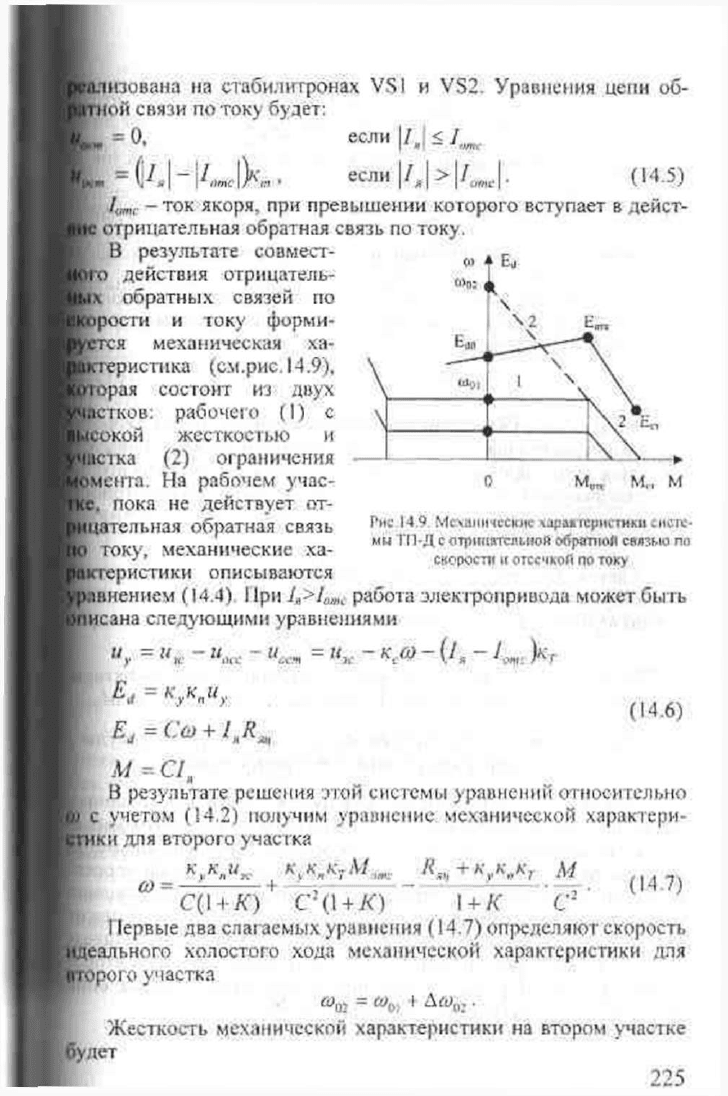
В результате соамест-
действия отрицатель-
обратных связей по
ти и току форми-
я механическая ха-
ристика (ext.рис. 14.9),
рая состоит из двух
сов: рабочего (I) с
кой жесткостью и
тка (2) ограничения
ента. На рабочем учас-
покя не действует от-
гельная обратная связь
току, механические ха-
фистики описываются
нением (14.4)
11ри
l
a
>l
mi
Рис I4.Q Мсчапичеснлс чаранерт тики систе-
мы ТП-Д с отрицательной обратной связью по
скорости к отсечкой по току
<с
работа электропривода может бы ть
Пеана следующими уравнениями
= и
к
-к
с
0-(1,-]
т1
)к у
" tc ".пс У ост
Ej = КуК„и
у
Е,=С(о + ГЯ
м
(14.6)
М -
С1
Л
В результате решения этой системы уравнений относительно
с учетом (14.2) получим уравнение механической характерн-
ей для второго участка
_
|
*>«„*гМ** я^ +K
r
K.hу м
С(\
+
К) С
2
(\
+
К)
\ +
К С
2
11ервые два слагаемых уравнения (14.7) Определяют скорость
1Ьного холостого хода механической характеристики для
)рОГО участка
со
01
=
со
0)
I А(о
о:
.
Жесткость механической характеристики на втором участке
/дет
C
2
(l
+
/Q
г шин 2 ri
"<,„
+ К,К
п
К,
ЙЦ у п 01 J
Если к
у
—>
оо, то жесткость механической характеристик на
С
2
К
втором участке будет р
1
= £., т.е. предельная жесткость
к
мг
механической характеристики зависит от соотношения коэффи-
циентов обратных связей к/и к
с
.
Э.д.с. преобразователя £,/ при работе двигателя с замкнутой
системой управления не остается постоянной, а изменяется в со-
ответствии с уравнением
Я
EJ =
С<О
+ ——-М
•
d
С
2
На рабочем участке механической характеристики скорость
примерно постоянна. С увеличением нагрузки на валу двигателя
Ej возрастает, как показано на рис.
14.9.
После перехода на второй
участок скорость снижается до нуля, наступает режим стопоре-
М ,
m
R
tu
ния и ^уменьшается до величины £ = — •
. Таким образом, для формирования желаемой механической
характеристики преобразователь должен иметь необходимый за-
пас по величине E
d
в соответствии с соотношением
Р'ичшк ~ Са>„ + I
от
Р
Ш1
•
В этой случае жесткость верхней механической характери-
стики
Д,
ат
1
будет постоянной при всех нагрузках вплоть до М
отс
.
14.6. Многоконтурные системы с подчиненным регули-
рованием координат электропривода
Для решения задач синтеза замкнутых систем электроприво-
да, обладающих хорошим быстродействием и желаемым харак-
тером переходных процессов, разработан инженерный метод
синтеза, получивший название метода последовательной коррек-
ции с подчиненным регулированием координат или сокращенно
метод подчиненного регулирования. В основе этого метода лежит
разработка многоконтурных систем, когда в результате ^нтеза
каждый из контуров описывается передаточной функцией второ-
го или третьего порядка и обеспечивает оптимальное управление
своей выходной регулируемой координатой.
Для построения такой системы в структурной схеме силовой
Цп электропривода выделяют последовательность динамиче-
их звеньев, каждое из которых имеет на своем выходе соответ-
ующую регулируемую координату
-
ток (Г), скорость (со), угол
"ворота (ср) или путь (s). После этого синтезируют контуры ре-
лирования, начиная с контура тока - первой внутренней коор-
наты. Синтез обычно выполняется с использованием активных
1едовательных корректирующих звеньев (регуляторов), рев-
изуемых на операционных усилителях постоянного тока с
1Ьшим коэффициентом усиления.
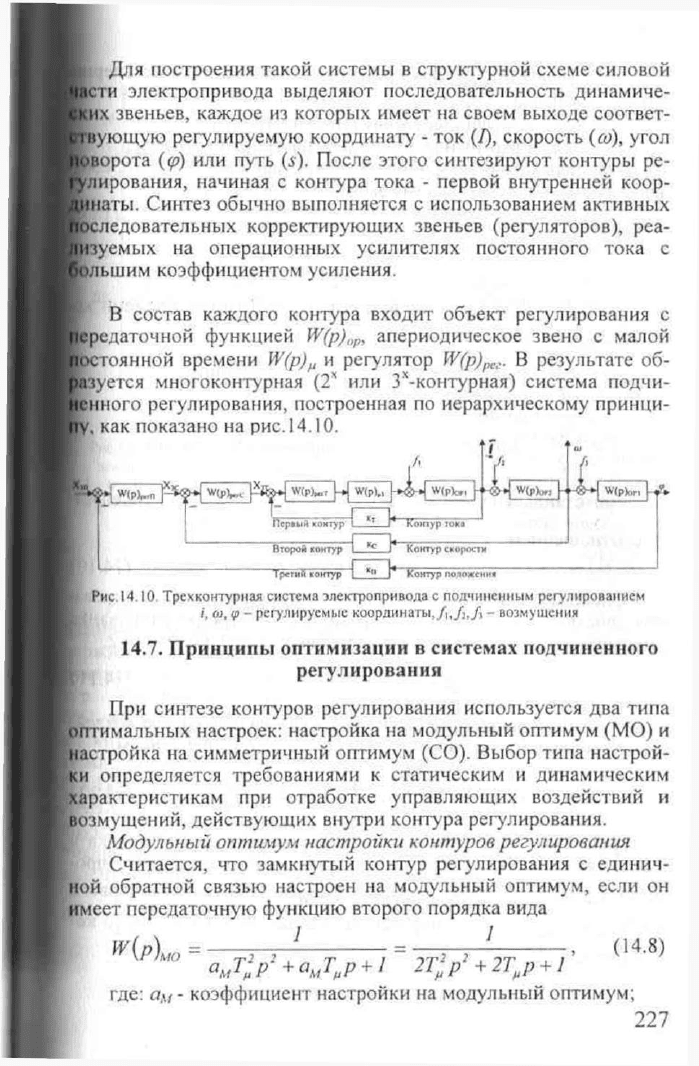
В состав каждого контура входит объект регулирования с
даточной функцией W(p)„
p
, апериодическое звено с малой
гоянной времени W(p)^ и регулятор W(р)^,.. В результате об-
Зуется многоконтурная (2
х
или Законтурная) система подчи-
нного регулирования, построенная по иерархическому принци-
как показано на рис. 14.10.
W(pW. [У»
Йер>ый контур I I
е
* Н Koinyp тока
Второй контур
Третий контур
Контур скиростм
Контур положения
Рис 14 10 Трехконтурная система электропривода с подчиненным регулированием
/, со, if - регулируемые координаты,
f\,fi,fi
- возмущения
14.7. Принципы оптимизации в системах подчиненного
регулирования
При синтезе контуров регулирования используется два типа
гимальных настроек: настройка на модульный оптимум (МО) и
встройка на симметричный оптимум (СО). Выбор типа настрой-
ки определяется требованиями к статическим и динамическим
арактернстикам при отработке управляющих воздействий и
[возмущений, действующих внутри когпура регулирования.
Модульный оптимум настройки контуров регулирования
Считается, что замкттый контур регулирования с единич-
ной обратной связью настроен на модульный оптимум, если он
имеет передаточную функцию второго порядка вида
W{p)
M
o= .
1
:" , т. (М.8)
a^p'+a^p
+
l 2Т~р
+
2Т
м
р
+
1
где:
од/ -
коэффициент настройки на модульный оптимум;
Т
и
- малая постоянная времени некомпснснруемого аперио-
дического звена;
4 - коэффициент модульной настройки;
а
К(
=2 • стандартный коэффициент настройки контура.
Эту передаточную функцию можно записать в форме, соот-
ветствующей колебательному звену
w{
v 1 / (№)
(D\ <д
к
где: Т
е
= Т
м
- эквивалентная постоянная времени ко-
лебательного звена;
=— - частота недемпфируемых колебаний;
к гтл
*
и
/о
£ = ' коэффициент демпфирования колебаний.
Для стандартной настройки T
t
- T^-Jl.
%
= ~. определяет-
ся соотношением
= • (14.10)
Следовательно, с возрастанием коэффициента демпфирова-
ния действительная частота колебаний в контуре регулирования
уменьшается. При стандартной настройке на МО, когда а
м
=2,
= (14.11)
м
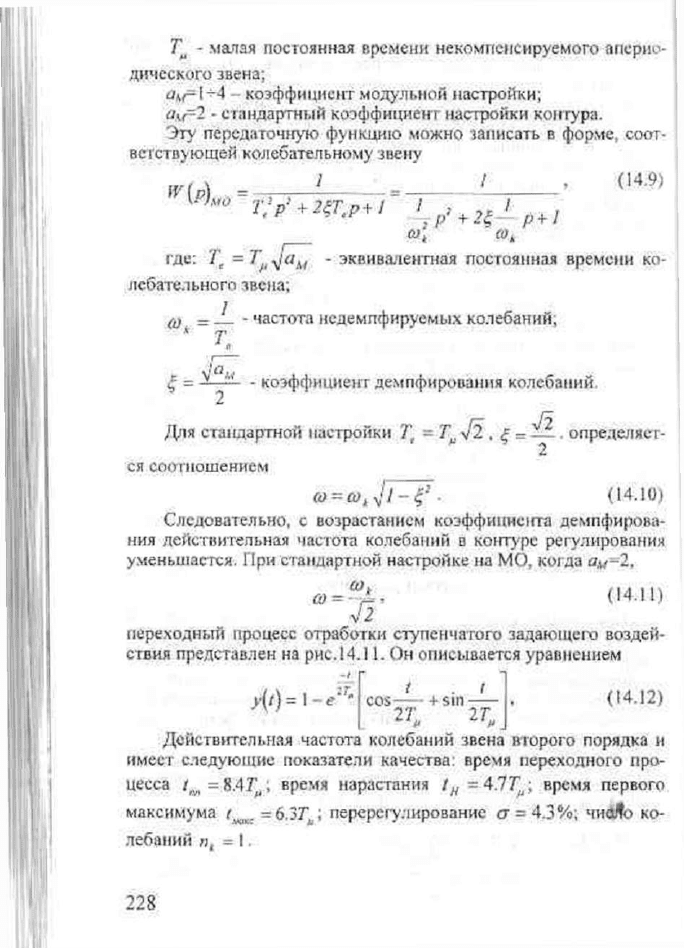
переходный процесс отработки ступенчатого задающего воздей-
ствия представлен на рис. 14.11. Он описывается уравнением
>(/)= \-е
гт
* cos— - + sin— . (14.12)
w
27; 27;
Действительная частота колебаний звена второго порядка и
имеет следующие показатели качества: время переходного про-
цесса = 8.47;; время нарастания /
и
=4.77;; время первого
максимума t^. =6.3Т
и
\ перерегулирование а = 4.3%; чийНо ко-
лебаний я, = I.

J'lIC 14.11. Переходные функции контуре регули-
рования, настроенного ни модульный оптимум
•^передаточной функции 2-го порядки. tu.--2
эквийапетшм по времени т экспоиеша
НрП -
Следовательно, в
контуре, настроенном
на МО, достигается
компромисс между
быстродействием и пе-
ререгулированием. ко-
гда при сравнительно
хорошем быстродей-
ствии (1
П
„ =8.47; Пе-
ререгулирование сос-
тавляет менее 5%
(сг=4.3%). По дина-
мическим показателям
этот переходный про-
цесс можно считать
приемлемым .для мно-
гих технологических
установок Разомкну-
тый контур, настроен-
ный на МО, имеет пе-
редаточную функцию
(14.13)
Так как эта пере-
чная функция со-
жнт одно интегри-
щее звено, то кон-
настроенный на
JO, является однократ-
интегрирующей сис-
йой. В соответствии с
34,-13) построенными
1ЛЧХ и ЛФЧХ разом-
того контура, наст-
енного на МО, при-
цепы на рис. 14.12, где
_!_ частота среза,
2 Г.
Рис.
14
12 ЛАЧХ н ЛФЧХ разойкнугого кон-
тора регулировании. nacipooHiwrn ня молуль-
иыП оптимум
о) - J— - частота сопряжения асимптот, а запас по фазе на час-
' Т.
тоте среза
A<p
c/i
= 180°-
<р
ср
= 63°.
Таким образом, задачей синтеза контура при настройке на
МО является выбор регулятора - последовательного коррек-
тирующего звена с такой передаточной функцией, чтобы разомк-
нутый контур имел передаточную функцию (14.13).
Симметричный оптимум настройки контуров регулирования
Считается, что замкнутый контур регулирования с единич-
ной отрицательной обратной связью настроен на симметричный
оптимум (СО), если он имеет передаточную функцию третьего
порядка вида
, , 4Т
ц
р +1
™\Р)со
-
3
,
2
, at 7
-
а
с
Т
м
р
+
а
с
Т
м
р +4T
fi
p
+
\ (И. 14)
47> +
1
8Г„У+87;V+47> + l
где: а
с
- коэффициент настройки на симметричный оптимум;
7^ - малая постоянная времени некомпенсируемого
апериодического звена;
а
с
=3,5-^-8 - коэффициент симметричной настройки;
а
с
=8 - стандартный коэффициент настройки контура.
Для контура, имеющего стандартную настройку на СО
(я
с
=8), переходный процесс отработки ступенчатого задающего
воздействия дан на рис. 14.13. Он описывается уравнением
'Л
И'Н
+ е
р
-
2е *
cos
v -
(14.15)
и имеет следующие показатели качества: время переходного про-
цесса t
nn
= 16.5T
fl
\ время нарастания t
u
=3.1 Г
/(
;
время 1-ого мак-
симума t
vaKC
=5.87^; время 1-ого минимума /^ = 12.757),;
перерегулирование а - 43%; число колебаний n
k
= 2 .
Из анализа показателей качества следует, что они в значи-
тельной степени отличаются от показателей контура, настроенно-
го на МО. Большое перерегулирование, равное сг=43%, обуслов-
лено влиянием форсирующего звена fV(p)=4Tp+1 в числителе
передаточной функции (14.14).